Глава шестая
СИСТЕМЫ ТЕЛЕМЕХАНИКИ ДЛЯ РАСПРЕДЕЛИТЕЛЬНЫХ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ
ОСОБЕННОСТИ СТРУКТУР СИСТЕМ ТЕЛЕМЕХАНИКИ ДЛЯ РАСПРЕДЕЛИТЕЛЬНЫХ СЕТЕЙ
Распределительные электрические сети — это высоковольтные линии (6 кВ и выше), связывающие понизительные питающие подстанции 220—35/6 (10) кВ непосредственно с потребителями электроэнергии. В зависимости от удаленности потребителей от питающей подстанции, от потребляемой мощности, категории надежности электроснабжения и т. п. распределительные сети могут иметь различные напряжение, конфигурацию и организацию эксплуатационного обслуживания. Оперативное управление распределительными сетями осуществляется с диспетчерских пунктов предприятий электросетей (ДП ПЭС) или районов электросетей (ДП РЭС), входящих в то или иное ПЭС. Как правило, распределительные сети 110—220 кВ и соответствующие питающие подстанции находятся в оперативном подчинении диспетчера ПЭС, а сети 35 кВ и 6 (10) и соответствующие понизительные подстанции управляются с ДП РЭС.
Объектами телеконтроля и управления на питающих подстанциях являются: положение высоковольтной коммутационной аппаратуры подстанций и отходящих от нее линий электроснабжения (ТС, ТУ), уровни напряжений на шинах подстанций, токи нагрузок по линиям, перетоки мощности по линиям, потребление энергии потребителями и т. п. (ТИ). Объекты ТУ, ТС и ТИ на подстанциях сосредоточены в пределах подстанции и обычно обслуживаются одним телемеханическим устройством КП. Устройство ПУ располагается по ДП ПЭС и (или) ДП РЭС.
В распределительных сетях 6 (10) кВ объекты телеконтроля рассредоточены по значительной территории, на которой находятся пункты секционирования (СП), распределительные переключательные пункты (РП, ЦРП), закрытые трансформаторные подстанции (ЗТП) 10/0,4 кВ, пункты двустороннего питания, оборудованные автоматами АВР (пункты АВР), и т. п. Все перечисленные пункты распределительной сети должны быть телемеханизированы для телеконтроля состояния выключательной мощности (ТС) и телеуправления этими выключателями с ДП РЭС. При отсутствии устройств телемеханики эффективность работы автоматики в пунктах секционирования сети и пунктах АВР значительно снижается из-за отсутствия информации у диспетчера об аварийных отключениях и невозможности изменения конфигурации сети для восстановления надежного энергоснабжения.
Важной информацией для снижения потерь в сетях являются также телеизмерение уровня напряжений в узловых точках сети, телеуправление положением анцапф трансформаторов и возможность подключения или отключения специальных компенсирующих конденсаторных батарей для уменьшения перетоков реактивной мощности.
Особая область телемеханизации управления распределительными сетями — это организация циркулярного телеуправления (ЦТУ), т. е. телеуправления целыми группами потребителей с целью снижения энергопотребления в часы пик (выравнивание графика нагрузки путем отключения на это время некоторых потребителей, например термоаккумулирующей нагрузки - бойлерных водоподогревателей и т. п.), переключения многотарифных счетчиков, управления уличным освещением и т. п. Системы ЦТУ особенно развиты в странах Западной Европы (ФРГ, Австрии, Франции, Швейцарии, Венгрии, Чехословакии) . Наиболее известные фирмы по производству систем циркулярного телеуправления ВВС, ZELWEGER USTER, LANDIS & GIR (Швейцария) поставляют аппаратуру во многие страны мира, благодаря чему большой процент объектов бытовой нагрузки распределительных сетей оснащены устройствами ЦТУ. В Советском Союзе циркулярное телеуправление в распределительных сетях еще не получило должного развития, главным образом из-за отсутствия многотарифной системы оплаты электроэнергии и отсутствия соответствующей техники.
Важной областью применения ЦТУ может явиться также автоматическая частотная разгрузка (АЧР), т. е. отключение части потребителей соответствующей категории при аварийной снижении частоты в энергосистеме.
Объектами ЦТУ являются выключатели (коммутаторы) нагрузки, рассредоточенные по сети 0,4 (0,22) кВ. Основным, а в большинстве случаев и единственным каналом связи для таких систем является канал тональной частоты, наложенной на промышленную частоту распределительной сети. Эти каналы наиболее экономичны и надежны в эксплуатации, в силу чего они получили наибольшее распространение в системах ЦТУ.
Каналы ЦТУ, как правило, имеют направление от центра управления (ПУ) к многочисленным КП, расположенным у потребителей. Число таких управляемых КП от одного ПУ может достигать нескольких тысяч. Устройство ПУ располагается на подстанции, находящейся, как правило, на территории ДП РЭС или ПЭС. В зависимости от числа и удаленности КП, а также от параметров и конфигурации сети электроснабжения выбирается мощность сигналов тональной частоты, вводимой в сеть для передачи команд ЦТУ. Для повышения помехоустойчивости передачи команд ЦТУ тональные частоты рекомендуется выбирать в диапазонах между гармониками промышленной частоты, т. е. применять для приема—передачи сигналов узкополосные фильтры с шириной пропускания не более 15—20 Гц и центральными частотами 183, 217, 275 Гц и т. д. при мощности сигналов, составляющей 0,1% номинальной мощности трансформаторов сети. Передатчик ЦТУ на ПУ осуществляет модуляцию сигналов тональной частоты по амплитуде, формируя кодовые посылки с адресами КП и командами ЦТУ. Для повышения помехоустойчивости сигналов длительность импульсных посылок выбирается, как правило, не менее 0,4—0,5 с.
В Советском Союзе, как отмечалось выше, по ряду причин системы ЦТУ не получили распространения. Большее внимание научно-исследовательских организаций (ЭНИН имени Кржижановского, Сельэнергопроект, ВНИИЭ и некоторые другие) привлекли разработки систем телеконтроля и телеуправления для объектов распределительных сетей 6 (10) кВ, в частности сельскохозяйственного назначения. Объекты этих сетей, разбросанные по значительной территории часто с плохим состоянием дорог, без систем телемеханики, требуют значительных расходов и времени на отыскание повреждений и ликвидацию аварийных состояний оборудования. Структура систем телемеханики для распределительных сетей определяется организацией диспетчерского управления в тех или иных районах, конфигурацией и размерами распределительных сетей, мощностью питающих подстанций и т. п.
Системы телемеханики (ТМ-35) для управления понизительными питающими подстанциями 35 кВ (и выше) имеют радиальную (’’один- один”), либо многоточечную радиальную (’’один—ТУ”), либо многоточечную магистральную структуру. В качестве каналов связи используются ВЧ каналы по ВЛ 35, 110, 220 кВ, дуплексные или полудуплексные, а также каналы любых других видов передачи телемеханической информации [34]. Система телемеханики ТМ-35 с многоточечной структурой строится по принципу временного разделения каналов для отдельных КП, имеющих выделенные кодовые адреса. Как правило, все КП подстанций опрашиваются последовательно во времени и при наличии на них новой информации передают ее на ПУ с обозначением своего адреса. Примерные типовые информационные емкости систем ТМ-35 для подстанций (в расчете на один КП): ТУ — до 20 двухпозиционных команд, ТС — до 40 двухпозиционных сигналов и ТИ — до 40 8-разрядных параметров. Число КП на один ПУ — до 16.
Системы телемеханики для распределительных сетей 10 (6) кВ - ТМ-10 характеризуются большим числом КП, рассредоточенных по территории распределительной сети с малой информационной емкостью (1—2 команды ТУ, 2—3 сигнала ТС, 1—2 параметра ТИ). Число таких КП в зоне одной питающей ПС 35/10 кВ может достигать нескольких десятков, а общее число таких зон (РС-10), контролируемых с одного ДП РЭС, — 6—8. В качестве каналов связи для телемеханизации распределительных сетей 10 кВ используются двусторонние каналы тональной частоты по ВЛ 10 кВ либо радиоканалы УКВ. При этом устройство ПУ может располагаться на ПС 35/10 кВ и обслуживать объекты КП в зоне данной ПС либо располагаться на ДП РЭС и обслуживать КП PC-10 нескольких ПС, контролируемых и управляемых с данного ДП РЭС. Одним из основных требований к телеканалам для распределительных сетей является экономия частот, используемых для передачи телеинформации, в данной зоне. Желательно, чтобы для двусторонней передачи информации в зоне одной ПС использовалась одна частота для всех КП (как для тонального канала, так и для радиоканала). Это же требование может распространиться и на все PC-10, обслуживаемые одним ДП РЭС. Поэтому система ТМ для распределительных сетей строится по принципу временного разделения одночастотного двустороннего канала связи для всех КП сети и для передачи команд ТУ и сообщений ТК с объектов этой сети. Поскольку в силу экономии частот приходится для различных зон PC-10 использовать одну и ту же частоту каналов, для исключения влияния передач информации между РС-10, относящихся к разным зонам, необходимо дополнительное кодовое разделение сообщений для различных зон РС-10, т. е. необходим двухступенчатый выбор объемов КП: выбор адреса зоны (код зоны) и выбор адреса КП (код КП) в данной зоне.
На рис. 6.1 приведены несколько возможных структур построения систем телемеханики для питающих подстанций 35/10 (ТМ-35) и распределительных сетей 10 (6) кВ (ТМ-10). На рис. 6.1, а представлена двухуровневая структура, состоящая из системы телемеханики ТМ-35 для телемеханизации питающих подстанций 35 кВ с устройством ПУ-35 на ДП РЭС и систем ТМ-10 с устройствами ПУ (ОП-10) на самих подстанциях 35 кВ. Информация из РС-10 собирается устройствами КП-10 и по каналам К-10 передается на ОП-10, откуда она ретранслируется через КП-35 диспетчеру ДП РЭС. В обратном направлении ретранслируются команды РТУ. При наличии дежурного персонала на ПС 35 команды ТУ непосредственно могут передаваться в сеть РС-10 через блок местного воспроизведения и управления БМВУ, располагаемый в устройстве ОП-10. По описанной схеме в качестве ТМ-10 могут использоваться устройства телекомплекса ТРС-1, а в качестве ТМ-35 — любые устройства общепромышленного назначения (ТМ-120 М, МКТ-3, ГРАНИТ, АИСТ—PC), в качестве каналов связи К-35 — ВЧ каналы по ВЛ 35 кВ, в качестве К-10 — каналы тонального уплотнения по ВЛ 10 кВ аппаратуры АТКС-10.
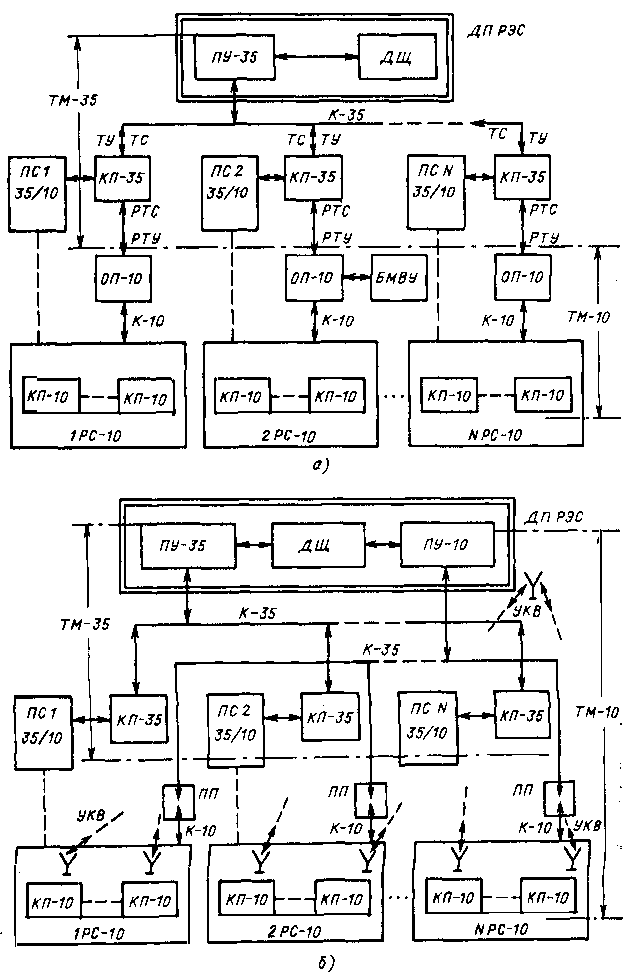
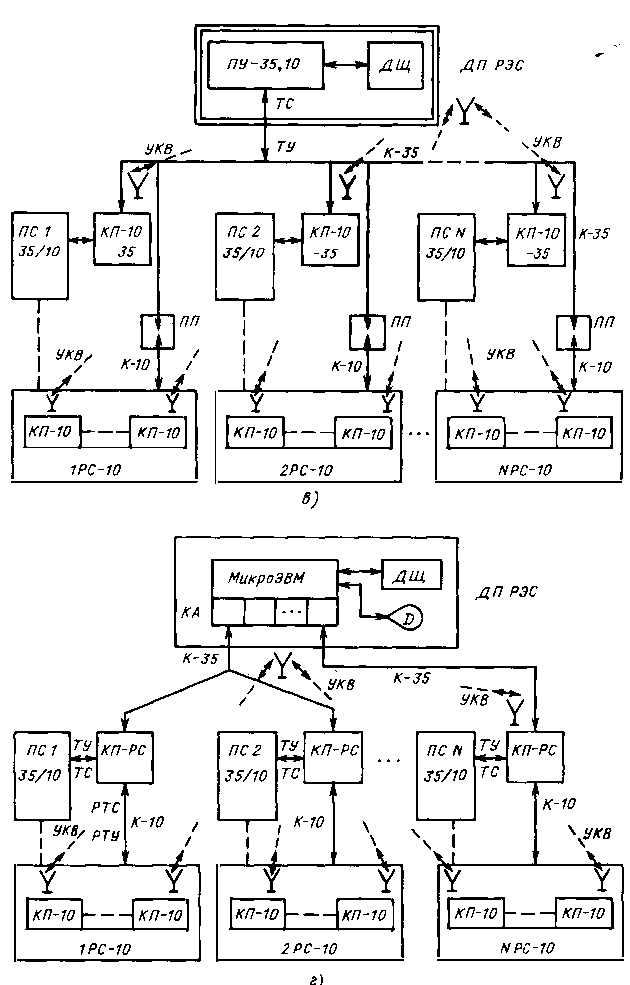
Рис. 6.1. Структуры систем телемеханики для распределительных сетей:
а - двухуровневая структура ТМ с ретрансляцией сигналов (РТС) и команд (РТУ); б - раздельные системы ТМ-35 и ТМ-10; в - совмещенная система ТМ-35. 10; г - двухуровневая система ТМ с совмещенными КП-35 и ОП-10 на базе микропроцессорных устройств КП-РС; ТМ-35 - система телемеханики для управления ПС 35 кВ; ПУ-35, КП-35 - УТМ системы ТМ-35; ТМ-10 - система телемеханики для распределительных сетей 10 кВ (6 кВ); ПУ-10 (ОП-10), КП-10 - УТМ системы ТМ-10; БМВУ - блок местного воспроизведения и управления УТМ ОП-10; КП—PC - микропроцессорные УТМ, выполняющие функции КП-35 и ОП-10; К-35, К-10 - каналы связи для ТМ-35 и ТМ-10 соответственно; ПП - пункты переприема канал-канал (К-35, К-10); 1РС-10, . . ., NPC-10 - зоны распределительных сетей 10 кВ соответствующих питающих подстанций ПС 1 35/10................... ПС № 35/10; ДЩ - щит - пульт управления ДП РЭС; Д - дисплей диспетчера; КА - канальные адаптеры микроЭВМ
На рис. 6.1, б представлена структура с раздельными системами телемеханики ТМ-35 и ТМ-10. Системы работают независимо друг от друга, по раздельным каналам связи. Устройства ПУ обеих систем располагаются на ДП РЭС и работают на общий ДЩ (как показано на рис. 6.1, б) либо на раздельные щиты с мнемосхемами 35 и 10 кВ. В качестве ТМ-35 и К-35 может использоваться та же аппаратура телемеханики и каналов связи, что и в двухуровневой структуре на рис. 6.1, а. В качестве ТМ-10 предполагается использовать аппаратуру телемеханики типа ТРС-1М с расширенной емкостью (по числу обслуживаемых КП) и с введением функций ТИ. В качестве канала связи для ТМ-10 необходим канал с переприемом: от КП-10 до подстанций 35/10 — тональный канал по ВЛ 10, как в случае двухуровневой структуры рис. 6.1, а, далее до ДП РЭС (если ПС не находится на территории ДП РЭС) — переприем ПП по каналу К-35 (ВЧ по ВЛ 35 либо через аппаратуру уплотнения физических телефонных линий связи). Скорость передачи сигналов по К-35 ограничивается скоростью передачи по каналам К-10. При использовании в качестве К-10 тональных каналов по ВЛ 10 кВ эта скорость не превышает 6,25 бит/с.
В качестве канала связи для телекомплекса ТРС-1М целесообразно использовать радиоканалы УКВ радиостанции типа 18Р22С Воронежского завода Минпромсвязи СССР. Телекомплексы, работающие на базе устройств телемеханики типа ТРС по тональным каналам связи по ВЛ 10 кВ, именуются системами ТМРС-10, а по радиоканалам УКВ — системами РТС-80. В системе РТС-80 приемопередатчики радиостанций устанавливаются на каждом КП сетей РС-10 и на ДП РЭС, где установлено УТМ ПУ ТРС-1М. Радиостанции обеспечивают полудуплексную связь между ПУ и каждым КП. Для приема и передачи информации используется одна и та же частота, выделенная для данного РЭС. Алгоритм работы радиоканала задается телекомплексом ТРС.
На рис. 6.1, в проиллюстрирована совмещенная система телемеханики ТМ-35, 10. Система работает по алгоритму телекомплекса ТРС. На ДП РЭС устанавливается ПУ-35, 10, являющийся УТМ ПУ-10 расширенной емкости, на всех КП, в том числе и на подстанциях 35/10, — устройства КП-10 системы ТРС-1М. Устройства КП-10 на объектах распределительной сети 10 кВ подключаются к общему каналу связи К-35 через ПП, связывающие каналы связи К-10 и К-35. Данная структура может быть использована только для маломощных питающих подстанций с малым числом объектов контроля и управления. Возможно также использование радиоканала, как и в структуре на рис. 6.1, б.
Весьма перспективной является двухуровневая структура ТМ с совмещением устройств КП-35 и КП-10 на базе микропроцессорных устройств КП—PC с программным управлением, представленная на рис. 6.1, г. Устройства КП-PC устанавливаются на ПС 35/10 кВ, где они выполняют функции КП-35 (телеконтроль и телеуправление объектами подстанции), а также функции ОП-10 в системе ТРС (опрос КП-10 и ретрансляцию сообщений ТС и ТУ от объектов РС-10 к ДП РЭС и обратно). Совмещение функций достигается соответствующим программным обеспечением микропроцессорных канальных адаптеров КП—PC, причем поскольку скорость передачи сигналов по каналам связи К-10 весьма мала (несколько бит в секунду), загрузка микропроцессора задачами сбора и передачи информации в сети РС-10 невелика и может быть организована в интервалы времени, свободные от решения задач приема-передачи информации от ДП РЭС. Функции ПУ-35 на ДП РЭС может выполнять микроЭВМ, например СМ-1800 с канальным адаптером (см. § 5.5).