Телемеханическая система состоит из устройств ТМ, расположенных на диспетчерских и контролируемых пунктах, связанных между собой каналами связи. Структура системы ТМ определяется структурой диспетчерского управления, взаимным географическим расположением контролируемых энергообъектов и пунктов контроля и управления и структурой каналов связи.
Если система ТМ содержит один или несколько диспетчерских пунктов одного уровня управления, то она является одноуровневой, если же в системе ТМ имеются диспетчерские пункты двух или более уровней ДУ, то это двух- или многоуровневая система.
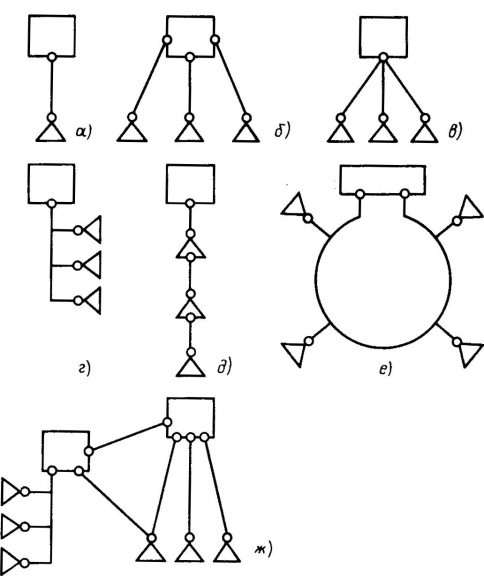
Рис. В.3. Структуры телемеханических систем:
а - ”точка-точка”; б - многоточечная радиальная ’’один-один”; в - многоточечная радиальная ’’один-N”; г - многоточечная магистральная; д - цепочечная (транзитная); е - кольцевая; ж - смешанная иерархическая
Типовые структуры систем ТМ относятся к одноуровневым системам. В стандарте МЭК ’’Устройства и системы телемеханики” [41, публикация 870.1.1] выделяются следующие типовые структуры систем ТМ (рис. В.3):
а) ’’пункт—пункт” (’’точка—точка”); структура, при которой один ПУ соединен с одним КП выделенным каналом связи;
б) многоточечная радиальная ’’один—один”; устройство ПУ, имеющее N линейных терминалов, связано с N КП. Возможен одновременный независимый обмен информацией между ПУ и каждым КП;
в) многоточечная радиальная (звездная) ’’один — N”; устройство ПУ связано с N устройствами КП через общий линейный терминал, обслуживающий N радиальных каналов связи. Одновременно только один КП может передавать информацию на ПУ. Передача общих команд с ПУ может производиться на все КП одновременно, передача индивидуальных команд - по адресу КП;
г) многоточечная магистральная; устройство ПУ связано общим каналом связи с N устройствами КП, расположенными вдоль этого канала. Организация связи между ПУ и КП такая же, как для многоточечной радиальной структуры;
д) цепочечная (транзитная) структура; устройство ПУ связано цепочечным каналом связи с устройствами КП. На КП производится ретрансляция сигналов;
е) многоточечная кольцевая; общий канал связи образует ’’кольцо”, к которому подключены все устройства КП. Кольцо замыкается устройством ПУ. При повреждении на одном из участков канала работоспособность КП сохраняется, так как связь с каждым из них может быть организована с двух сторон.
Кроме отмеченных типовых структур встречаются разнообразные их комбинации, образующие так называемые гибридные смешанные структуры. Гибридные структуры особенно характерны для многоуровневых иерархических систем ТМ, когда на разных уровнях диспетчерского управления могут встречаться структуры разных типов (рис. В.3,ж).