Такие средства управления, как ОГ, ОН, ДС, каждое в отдельности и в различных сочетаниях обеспечивают повышение уровня статической устойчивости в послеаварийных режимах и оказывают воздействие и на условия динамической устойчивости.
Согласно действующим в ЕЭС нормативам переходный процесс считается устойчивым, если выполняются условия динамической устойчивости и обеспечивается статическая устойчивость с коэффициентом запаса, не ниже нормативного, на всех фазах процесса вплоть до установления нового стационарного режима. С этих позиций объем управляющих воздействий ( АРу ), необходимый для обеспечения устойчивости, в общем виде представляется следующим образом:
 (25)
(25)
в частности при использовании ОГ и ОН:
![]() (26)
(26)
где![]() - требуемое при данной аварийной ситуации для
- требуемое при данной аварийной ситуации для
обеспечения устойчивости сочетание объемов отключения генераторов и нагрузки![]() - сочетание управляющих воздействий, требуемое
- сочетание управляющих воздействий, требуемое
по условиям обеспечения динамической устойчивости;![]() сочетание
сочетание
управляющих воздействий, требуемое по условиям обеспечения нормативного запаса статической устойчивости в послеаварийном режиме.
При этом последнее сочетание в свою очередь определяется как максимальное по условиям квазиустановившегося режима и послеаварийного режима с учетом действия систем регулирования.
При слабо выраженном динамическом процессе, в частности, во многих случаях "простого перехода": АРду не превышает ΔΡ . В этих случаях
формирование АРу на основе средств управления типа ОГ, ОН, ДС вполне оправдано, т.к. требуется корректировка режима на значительном интервале времени.
При глубоких динамических возмущениях, связанных с двух- и трехполосными короткими замыканиями вблизи шин одной из крупных электростанций, для сохранения устойчивости параллельной работы этой электростанции в первом цикле синхронных качаний может оказаться необходимым существенно большее управляющее воздействие, чем по условиям статической устойчивости, и тогда выбор по условиям (26) приведет к избыточному отключению генераторов и нагрузки в послеаварийном режиме. Практически возможны и такие аварийные ситуации, при которых для обеспечения устойчивости электростанции после глубокого аварийного возмущения необходимо отключить большую часть ее генераторов (отключение нагрузки в таких ситуациях обычно еще менее эффективно). Возврат избыточно отключенных генераторов и потребителей во многих случаях может быть осуществлен не ранее, чем через несколько минут (а иногда и часов).
Для преодоления указанных трудностей и противоречий были разработаны средства управления, обеспечивающие управляющие воздействия импульсного типа. К числу их относится и электрическое торможение генераторов (ЭТ), осуществляемое включением параллельно или последовательно специальных резисторов.
Параллельное включение резистора может осуществляться на шинах отдельных генераторов или на высоковольтных шинах электростанции (рис.11,а, б) специальным коммутирующим аппаратом. Сопротивление резистора ( Rx )

Рис. 11
выбирается из условия:
 (27)
(27)
где иномш - номинальные значения напряжения генератора,
высоковольтных шин электростанции; Рном - номинальная мощность i-го генератора.
Во втором выражении (27) суммируются мощности генераторов, которые могут быть подключены к системе шин электростанции. В пределе это мощность всех генераторов электростанции и одна установка ЭТ на вес станцию. В качестве наиболее перспективного материала для резистора ЭТ в настоящее время рассматривается бетэл (электропроводящий бетон), конструкция из которого может быть установлена на открытой подстанции.
Коммутатор установки ЭТ должен обеспечивать собственное время как на включение, так и на отключение, не превышающее 0.03-0.05 с. При этом отсутствуют требования на отключение тока короткого замыкания.
Основная задача ЭТ состоит в предотвращении выпадения из синхронизма генераторов электростанции при интенсивном увеличении угла δ в первом цикле синхронных качаний. В схеме замещения включение на шины электростанции резистора ЭТ приводит очевидно к увеличению составляющей
 , что эквивалентно снижению Рта . Одновременно несколько увеличивается и Z12, что обусловливает определенное уменьшение Ртэ.
, что эквивалентно снижению Рта . Одновременно несколько увеличивается и Z12, что обусловливает определенное уменьшение Ртэ.
Последнее при равной относительной мощности резисторов в меньшей мере проявляется при включении их на шины генераторов. Заметное влияние на изменение Ртэ и Ртэ оказывает регулирование возбуждения генераторов электростанции.
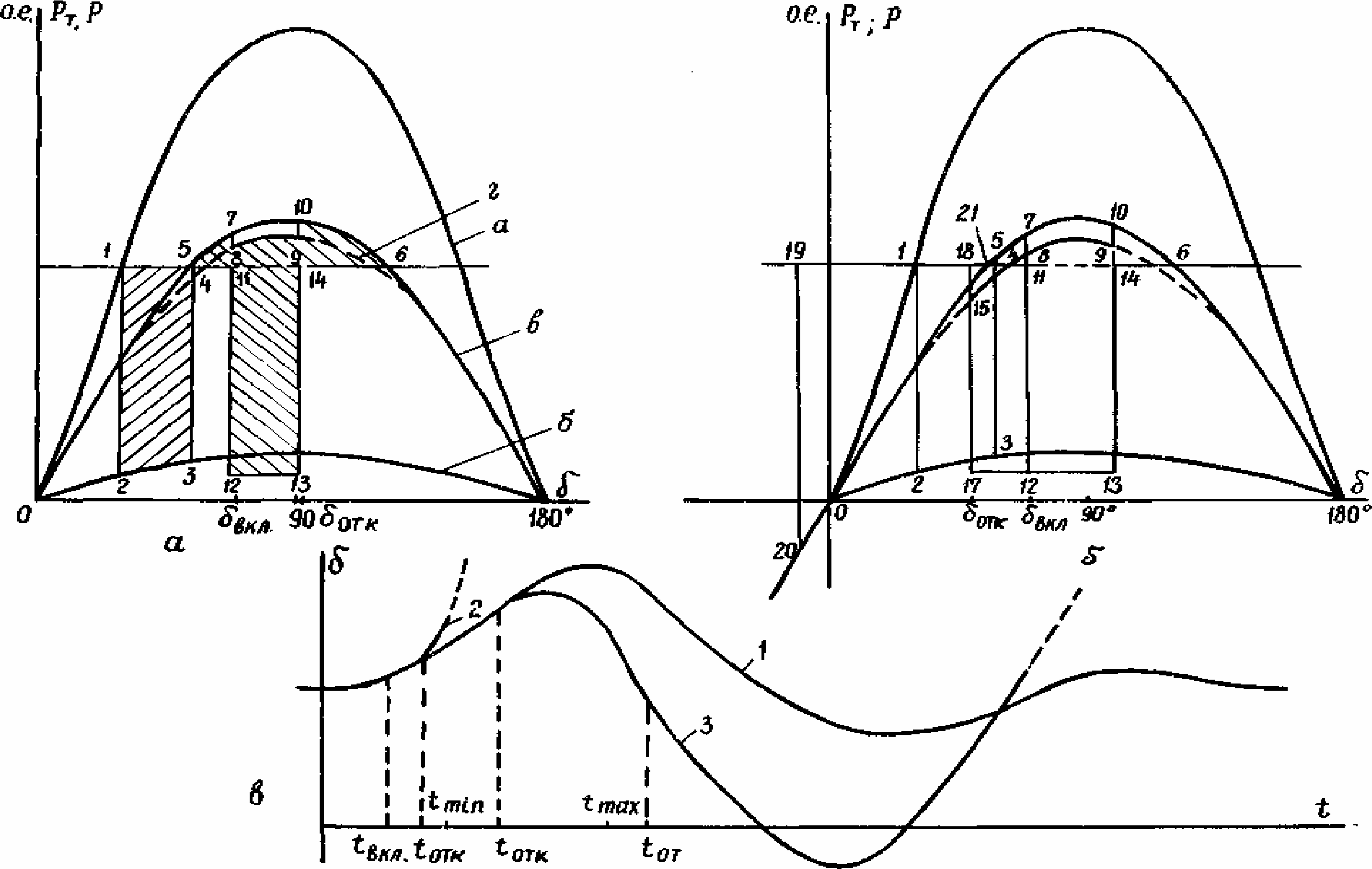
Для пояснения механизма воздействия ЭТ и определения требований к управлению включением-отключением резистора рассмотрим моментно-угловые характеристики рис.12, соответствующие рассматривавшемуся ранее случаю ослабления связи в результате отключения параллельной ЛЭП при коротком замыкании на ней. При достижении некоторого значения угла соответствующего моменту включения резистора ЭТ (рис.12,а). происходит скачкообразное изменение Рт и одновременно переход на новую моментно-угловую характеристику "г" с пониженным значением Рт.
При угле δотк резистор отключается и происходит возврат к исходному значению и характеристике "в". Условия устойчивости в первом цикле синхронных качаний согласно "правилу площадей" записываются в виде:
![]() (28) *
(28) *
* Момент включения для наглядности изображения принят с некоторой выдержкой времени после отключения к.з.
После отключения резистора развитие переходного процесса может иметь
различный характер в зависимости от значений δ и![]() в момент отключения, которые в свою очередь при прочих равных условиях зависят от момента включения ( tвкл) и длительности торможения (tomк -tвкл).
в момент отключения, которые в свою очередь при прочих равных условиях зависят от момента включения ( tвкл) и длительности торможения (tomк -tвкл).
При недостаточной длительности ЭТ после отключения резистора угол δ может превысить критическое значение, соответствующее точке 6, и произойдет нарушение устойчивости в первом цикле.
При избыточной длительности ЭТ произойдет нарушение устойчивости во втором цикле качаний. Для пояснения этого случая на рис. 12.б рассмотрен вариант отключения резистора при δотк <δβκл, т.е. после прохождения не только максимума угла δ, но и значения угла, при мотором было осуществлено включение. Реальная "площадь торможения" в этом случае определяется суммой:
![]()
В результате избыточного торможения угол δ и после отключения резистора будет продолжать уменьшаться до некоторого минимального значения, соответствующего точке 20 на моментно-угловой характеристике, после чего под действием разницы моментов РТ - Рт sin δ начнет вновь расти. При этом условия устойчивости последующего перехода определяются соотношением площадей: S19-20-21-19 < S21-6-21 , которое может и не выполняться.
На рис. 12,в представлены три варианта процесса δ = f(t) при одинаковых tотк и различных tomK : при t 'отк процесс заканчивается переходом к новому устойчивому состоянию (I). Для обеспечения устойчивости должно соблюдаться условие:
tmin<omK <max. При этом значения tmin и tmax не являются постоянными и в каждом данном случае определяются аварийной ситуацией, т.е. исходной и
послеаварийной схемами, исходным режимом, видом и длительностью короткого замыкания, а также значением RT и моментом tвкл. Во всех случаях целесообразно до минимума снизить запаздывание при включении; т.к. во время короткого замыкания подключение резистора практически бесполезно, обычно стремятся осуществить включение в момент ликвидации короткого замыкания. Длительность включения резистора (tomк - tвкл) обычно не превышает 0.5-0.8 с, а реальный диапазон tmax+tmin может быть иногда на порядок меньшим.
Из сказанного ясно, что для достижения положительного эффекта требуется весьма точное управление ЭТ. В настоящее время разработаны несколько вариантов устройств управления, основывающихся как на программном управлении в зависимости от начальных условий, так и на управлении в зависимости от изменения режимных параметров (электрической мощности, угла, скорости его изменения и др.). При этом обычно изменяемым является время tomк, а tвкл принимается минимально возможным. Разработаны и более сложные системы управления, рассчитанные на неоднократное включение резистора для корректировки процесса после первого (избыточного по времени) включения.
Иной принцип управления должен быть использован при включении резистора последовательно в цепь генератора. При таком включении положительный эффект достигается в основном в течение времени короткого замыкания за счет выделения энергии, получаемой при протекании токов короткого замыкания через резисторы.
 (29)
(29)
Пофазная оценка мощности (энергии) необходима, имея в виду несимметричные к.з. Значение WT изменяется в зависимости от вида и места короткого замыкания, обеспечивая определенный "автоматизм" в компенсации сброса мощности генераторов.
Из сказанного очевидно, что для реализации ЭТ при последовательном включении резистора необходимо обеспечить расшунтирование резистора на время короткого замыкания, что практически достижимо лишь при использовании бесконтактных (например, тиристорных) коммутаторов.
Преимущества последовательного включения резистора проявляются в некоторых особых случаях, например, в случае короткого замыкания вблизи ГЭС с капсульными гидрогенераторами, обладающими очень малой инерционной постоянной.
ЭТ может осуществляться также за счет включения резистора между нейтралью трансформатора и землей. Тормозной эффект возникает в несимметричных режимах (в частности при к.з.) за счет протекающих через резистор токов нулевой последовательности. В симметричных режимах ток через резистор не протекает, и потому резистор может быть включен постоянно, что является несомненным преимуществом этого способа. В то же время очевидно, что при наиболее тяжелом трехфазном коротком замыкании эффект торможения отсутствует.
Известны и другие способы торможения генераторов для компенсации кратковременного динамического возмущения при коротком замыкании.
Однако в настоящее время известны лишь отдельные случаи практического использования установок электрического торможения генераторов ввиду высокой стоимости этих установок.