СДТУ
Инструкции по эксплуатации средств связи и телемеханики
РОССИЙСКОЕ АКЦИОНЕРНОЕ ОБЩЕСТВО ЭНЕРГЕТИКИ И ЭЛЕКТРИФИКАЦИИ "ЕЭСРОССИИ"
ДЕПАРТАМЕНТСТРАТЕГИИ РАЗВИТИЯ И НАУЧНО-ТЕХНИЧЕСКОЙ ПОЛИТИКИ
МЕТОДИКА ЭКСПЛУАТАЦИОННОГО ОБСЛУЖИВАНИЯ УСТРОЙСТВ ТЕЛЕМЕХАНИКИ В ПРЕДПРИЯТИЯХ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ
РД153-34.3-48.516-98
Разработано Открытым акционерным обществом "Фирма по наладке, совершенствованию технологии и эксплуатации электростанций и сетей ОРГРЭС"
Исполнитель Я.В. ЛУРЬЕ
Утверждено Департаментом стратегии развития и научно-технической политики РАО "ЕЭС России"15.12.98 г.
Первый заместитель начальника А.П. БЕРСЕНЕВ
МЕТОДИКА ЭКСПЛУАТАЦИОННОГО ОБСЛУЖИВАНИЯ УСТРОЙСТВ ТЕЛЕМЕХАНИКИ В ПРЕДПРИЯТИЯХ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ | РД 153-34.3-48.516-98 |
Вводится в действие с 01.12.2000 г
В энергосистемах России находятся в эксплуатации различные устройства телемеханики, на базе которых функционирует иерархическая система передачи оперативных данных (СПОД).
В последние годы проводится замена устройств старых типов на новые телекомплексы и микроЭВМ. Техническая эксплуатация новых систем телемеханики требует от эксплуатационного персонала новых знаний и новых методов обслуживания.
В работе приведены методы эксплуатационного обслуживания современных устройств телемеханики в предприятиях электрических сетей (ПЭС).
1. ОБЩАЯ ЧАСТЬ
Эксплуатационное обслуживание устройств телемеханики и телекомплексов (УТМ и ТК) включает в себя поддержание аппаратуры в установленных паспортами режимах, отыскание и устранение неисправностей, возникающих во время эксплуатации.
Профилактическое обслуживание заключается в проведении частичных и полных проверок аппаратуры телемеханики и дает возможность не только своевременно анализировать причины и характер возникающих повреждений, но и частично предотвращать возможные повреждения при дальнейшей эксплуатации.
Составной частью профилактического обслуживания является прогнозирование повреждений, основанное на объективных статистических данных и неисправностях аппаратуры в процессе эксплуатации. Объем проверок определяется типом аппаратуры телемеханики, ее назначением и условиями работы. Проведение проверок с минимальными затратами времени и высоким качеством возможно только при четкой организации, соблюдении установленного объема и последовательности работ.
Порядок профилактического обслуживания УТМ третьего и четвертого поколений определяется методичностью. Методика поиска неисправности в такой системе в общем виде характеризуется следующими положениями: состояние элементов системы можно оценить, выполнив ряд проверок в определенной последовательности; порядок проведения проверок может меняться в зависимости от результатов предыдущей проверки.
В качестве оконечных устройств на энергообъектах установлены разнообразные УТМ и ТК с различными протоколами обмена данными.
Для проверки выполнения современной аппаратурой основных функций при вводе в эксплуатацию, во время эксплуатации, при ремонте, поиске причины неисправности необходимы новые методические приемы. Ранее привычные методы поиска неисправностей, профилактических проверок, таких, как наблюдение и анализ сигналов в характерных контрольных точках, малоэффективны при эксплуатационном обслуживании современных УТМ и ТК. Комплексная проверка современного ТК представляет собой последовательность операций от центральных узлов к периферийным.
2. МЕРЫ БЕЗОПАСНОСТИ ПРИ ЭКСПЛУАТАЦИОННОМ ОБСЛУЖИВАНИИ ТЕЛЕКОМПЛЕКСОВ
2.1. Работа с устройствами должна производиться с соблюдением требований "Правил эксплуатации электроустановок потребителей" (М.: Энергоатомиздат, 1992) и "Правил техники безопасности при эксплуатации электроустановок потребителей" (М.: Энергоатомиздат, 1986).
2.2. Работа с УТМ разрешается персоналу, имеющему соответствующее действующее удостоверение о проверке знаний по технике безопасности, прошедшему специальное обучение и допущенному к самостоятельной работе с соответствующими устройствами.
2.3. Все шкафы устройств должны быть заземлены - все болты, имеющие маркировку "земля" должны быть надежно соединены с системой заземления данного объекта.
2.4. При работе с устройствами все операции, связанные с подключением (отключением) разъемов или проводов к выводам, заменой предохранителей, ламп и других комплектующих изделий субблоков, блоков и шкафов, производятся только на обесточенной аппаратуре.
2.5. При проведении монтажных и наладочных работ принять меры пожарной безопасности в соответствии с требованиями, действующими на месте монтажа, и инструкцией по обеспечению пожарной безопасности.
2.6. Шкафы устройств должны быть надежно закреплены на стене или на панели. Для придания устойчивости панелям при открывании дверцы шкафа (или поворотной рамы) панели должны быть надежно прикреплены к закладным устройствам в полу или к временным приспособлениям (деревянным брускам, швеллеру); выступающая часть должна выходить за дверь шкафа не менее чем на 300 мм. ВНИМАНИЕ! Не допускается работа со шкафами без их надежного закрепления. Не допускается применение нестандартных плавких вставок (предохранителей).
3. ЭКСПЛУАТАЦИОННЫЕ ПРОВЕРКИ (ПЛАНОВЫЕ РЕВИЗИИ) УТМ И ТК
3.1. Полная проверка выполняется в соответствии с графиком по разрешенной заявке. Отключение аппаратуры производится по разрешению дежурного диспетчера.
3.2. Для устройств, показания которых ретранслируются на другие пункты управления, необходимо предварительно принять соответствующие меры, исключающие неправильную передачу телеинформации на другой диспетчерский пункт (переключение цепей, ввод ручных уставок и т.п.).
3.3. Рабочие места на энергообъектах подготавливаются производителем работ в соответствии с требованиями "Правил техники безопасности при эксплуатации электроустановок" (М.: Энергоатомиздат, 1986). При работе на датчиках текущих телеизмерений, связанных с цепями измерительных трансформаторов тока и напряжения, необходимо соблюдать особую осторожность, не допуская разрыва токовых цепей и замыкания в цепях напряжения. Рабочие места заблаговременно обеспечиваются приборами, инструментами и документацией.
3.4. Сопротивление изоляции монтажа устройств относительно "земли" измеряется омметром на всех внешних зажимах аппаратуры, за исключением цепей, связанных с сетью питания 220 В и трансформаторами тока и напряжения. Цепи питания проверяются мегаомметром на 1000 В и должны иметь сопротивление не ниже 10 МОм.
3.5. Систематический контроль за работой телекомплексов предусматривает:
а) ознакомление с записями в журнале неполадок;
б) ежедневный внешний осмотр:
- проверка вызова нескольких кадров с дисплея или ПЭВМ;
- посылка команды "opros" с консольного дисплея (ТК "ГРАНИТ") с контролем по лампочкам блоков ЛУ ответов от КП. При отсутствии ответа от КП необходимо выяснить причину (канал связи, электропитание на объекте, исправность аппарата КП, узла ЛУ в аппарате ПУ и т.д.);
в) оценка основной погрешности параметров телеизмерения;
г) бесперебойность приема информации телесигнализации (ТС), цифробуквенной информации (ЦБИ), текущих телеизмерений (ТИТ), телеизмерений интегральных значений (ТИИ).
3.6. Частичная проверка проводится согласно графику по разрешению дежурного диспетчера.
В объем частичной проверки входят:
- внешний осмотр и чистка аппаратуры от пыли;
- измерение осциллографом формы и амплитуды сигнала на входе линейных узлов;
- определение погрешности показаний ТИ в трех, четырех точках шкалы.
При этом допускается определять погрешность по щитовым приборам на КП;
- измерение напряжения на блоках питания;
- проверка вентиляторов (при наличии) и при необходимости их смазка.
3.7. Полная проверка производится в таком же порядке, как и частичная, но включает в себя дополнительные работы, (для ТК "ГРАНИТ"), а именно: проверку перезагрузки базового программного обеспечения как, с ППЗУ, так и с НГМД; перезагрузка с ППЗУ производится нажатием красной кнопки на фасаде блока Р-25. Если при перезагрузке с ППЗУ на консольном дисплее появляется сообщение об ошибке: ERR8 (что означает нарушение файловой структуры), следует заново записать программу на ППЗУ. Проверка перезагрузки с накопителя на гибких дисках производится в следующем порядке:
- загрузка операционной системы "ФОДОС";
- загрузка операционной системы "ОС РВ ГРАНИТ".
Проверка резервирования микроЭВМ в ТК "ГРАНИТ" производится выключением блока питания микроЭВМ; при этом работа на диспетчерском дисплее не должна нарушаться.
4. ПРИЕМКА УТМ И ТК В ЭКСПЛУАТАЦИЮ ОТ НАЛАДОЧНЫХ ОРГАНИЗАЦИЙ
Ввод систем телемеханики в эксплуатацию производится приемочной комиссией, назначенной приказом главного инженера предприятия. Комиссии должна быть предъявлена полностью смонтированная и налаженная аппаратура. До предъявления к сдаче проводится тренировочная эксплуатация системы телемеханики (СТ), во время которой СТ должна функционировать без вмешательства эксплуатационного персонала. Тренировочная эксплуатация, длительность которой устанавливается не менее чем 72 ч, должна определить качество работы аппаратуры в нормальных эксплуатационных условиях.
Системы телеуправления и телесигнализации желательно во время тренировочной эксплуатации включать на "сигнал". Это обеспечивает возможность регулярных проверок достоверности и надежности работы СТ путем передачи с ПУ периодических запросов и команд. Результаты тренировочной эксплуатации СТ оформляются протоколами и предъявляются приемочной комиссии.
На основании анализа протоколов контрольных испытаний и измерений, а также материалов тренировочной эксплуатации выносится решение о вводе СТ в эксплуатацию или о необходимости дополнительных наладочных работ и повторной сдаче СТ приемочной комиссии.
Приемочной комиссией должны быть проверены следующие функции СТ.:
- ввод теле сигналов от двухпозиционных датчиков;
- ввод сигналов ТИТ от первичных датчиков;
- ввод сигналов ТИИ от датчиков число импульсных сигналов;
- вывод команд телеуправления (ТУ) на исполнительные механизмы;
- сопряжение с каналами связи, модемами;
- передача информации ТС, ТИТ, ТИИ;
- ретрансляция информации, принятой от другого КП или ПУ;
- сопряжение с ПЭВМ и возможность ввода в КП или ПУ предельных значений, возможность диагностики неисправности функциональных элементов и узлов;
- отображение телекомплексом или центральной приемопередающей станцией (ЦППС) состояния ТС, ТИТ, ТИИ, ЦБИ.
5. ОБЩИЕ УКАЗАНИЯ ПО ЭКСПЛУАТАЦИИ ТЕЛЕКОМПЛЕКСОВ
5.1. Распаковка
5.1.1. Распаковка устройств должна производиться после доставки изделий в помещение к месту проверки или установки.
При этом, если транспортирование и хранение устройств производилось при отрицательных температурах, то устройства перед установкой и расконсервацией должны быть выдержаны не менее трех суток в помещении или под навесом в следующих климатических условиях:
температура - от 18 до 27°С;
относительная влажность - от 35 до 75%.
При положительной температуре наружного воздуха и относительной влажности не более 80% разрешается распаковывать изделия на открытом воздухе под навесом. В этом случае распакованное устройство должно заноситься в помещение не позднее 0,5 ч после вскрытия.
5.1.2. При распаковке после транспортировки и хранения на складе необходимо выполнить следующие операции:
осторожно вскрыть ящик, избегая резких ударов по нему и соблюдая правильное положение ящика в соответствии с имеющимися на нем надписями;
освободить устройство от креплений к основанию тары (если она имеется);
снять оберточные материалы;
установить устройство вертикально в рабочее положение.
ВНИМАНИЕ! Шкафы устройств необходимо сразу устанавливать на стенде или на надежно закрепленные панели, сохраняющие устойчивость при открывании дверцы шкафа или поворотной рамы.
5.2. Обслуживание
5.2.1. Устройства обслуживают лица, изучившие их работу, инструкцию по эксплуатации, правила техники безопасности и допущенные к эксплуатации устройств телемеханики.
5.3. Внешний осмотр
5.3.1. После распаковки шкафов устройств телемеханики следует убедиться в комплектности поставки. Комплектность поставки указана в договоре, а также в паспорте или формуляре.
5.3.2. Проверить шкафы устройств на соответствие номерам, указанным в паспорте и формуляре, при поставке комплекса.
5.3.3. Перед тем, как открыть дверь шкафа, надо ключом открыть замок. Субблоки из блоков вынимаются за ручки или специальным ключом. Перед выемкой субблока необходимо снять рейку блока. Если на фронтальной панели субблока имеется разъем (разъемы), то перед выемкой субблока из блока надо отсоединить колодку разъема внешних связей.
5.3.4. Перед электрическим монтажом осмотреть шкафы устройств. Внешний осмотр производится с целью выявления возможных механических повреждений во время транспортировки устройств к месту установки.
5.3.5. При внешнем осмотре обратить внимание на состояние электрического монтажа, проверить крепление блоков в шкафах и субблоков в блоках.
5.4. Устранение механических повреждений и нарушенных паек, выявленных при внешнем осмотре
5.4.1. При восстановлении нарушенных паек или замене неисправных деталей следует руководствоваться правилами монтажа слаботочного оборудования:
- перепайку одной детали можно производить не более двух раз;
- длительность пайки выводов элементов должна быть минимально необходимой, но не более длительности, указанной в технических условиях на эти элементы;
- вновь установленные элементы должны соответствовать ГОСТ на них.
5.4.2. При обращении с микросхемами или замене их на платах субблоков следует руководствоваться следующими правилами:
- инструменты, а также все металлическое оборудование должны быть заземлены;
- необходимо принять меры, исключающие воздействие электростатического электричества со стороны персонала (одежда, напольные покрытия и т.д.). Запрещается браться руками за выводы микросхем;
- необходимо принять меры к исключению соприкосновения микросхем с материалами, на которых возможно накопление электростатического заряда;
- запрещается упаковывать микросхемы в тару из таких материалов без применения мер, обеспечивающих защиту микросхем от воздействия на них электростатического заряда и напряжений, превышающих предельные значения;
- допустимое значение электростатического потенциала - не более 30 В, опасное значение потенциала - не более 100 В;
- до распайки микросхемы на печатной плате необходимо соединить шины, по которым подводится питание;
- во время распайки микросхемы необходимо соблюдать следующую последовательность: вначале припаять общий вывод микросхемы, затем - плюс (минус) питания и наконец, все остальные выводы.
- рекомендуется применять паяльник напряжением 12 В, допускается применение паяльника напряжением постоянного или переменного тока не более 36 В;
- жало паяльника и один из питающих паяльник проводов, а также общая шина и шина "питания" должны быть заземлены.
Пайка должна производиться припоем ПОС-61 (ГОСТ 21931-76) с применением бескислотного флюса (возможно применение в качестве флюса спиртового раствора канифоли).
5.5. Перечень аппаратуры ТК
Для проверки и эксплуатации комплексов телемеханических устройств применяются приборы и оборудование, приведенные в приложении 5.
5.6. Измерение значения сопротивления изоляции устройств
5.6.1. Извлечь из шкафов все субблоки с микросхемами. Сопротивление изоляции измерять мегаомметром на напряжение 500 В при нормальных условиях:
- температура окружающей среды +25¸-10°С;
- относительная влажность от 45 до 80%;
- атмосферное давление от 630 до 800 мм рт.ст.
Сопротивление изоляции каждого устройства должно соответствовать значениям, приведенным в паспортах, и быть не менее 20 МОм.
5.6.2. Мегаомметр подключать между:
- цепями переменного тока 220 В и всеми другими входными и выходными цепями, соединенными между собой и с корпусом (автоматические выключатели ~220 В должны быть в положении ВКЛ);
- входными цепями ТС и корпусом;
- выходными цепями ТС и корпусом;
- входными линейными цепями и корпусом;
- выходными линейными цепями и корпусом;
- входными цепями ТИ и корпусом;
- каждыми двумя группами цепей;
- выходными цепями ТУ и корпусом;
- шинами питания постоянного тока и корпусом.
5.6.3. Изоляция на стороне КП проверяется для всех цепей, связанных с источниками питания устройства и общих цепей ТУ и ТС, связанных с оперативным напряжением объекта. Изоляция индивидуальных цепей ТУ и ТС испытывается при проверках вторичной коммутации соответствующих присоединений.
Цепи устройств телемеханики проверяются мегаомметром на 500 В, а цепи, связанные с оперативным током объекта, мегаомметром на 2500 В.
Сопротивление изоляции цепей, включающих межаппаратные кабельные связи, измеренное мегаомметром на 500 В, не должно быть менее 10 МОм; цепи питания 220 В должны иметь сопротивление изоляции не менее 20 МОм на каждое присоединение.
Изоляция монтажа проверяется относительно "земли", а при наличии нескольких независимых источников питания - между цепями этих источников. Необходимо обеспечить условия соединения всех подлежащих проверке цепей с шинками питания.
Изоляция линий связи от аппарата УТМ до устройств каналов телемеханики проверяется омметром относительно "земли" и между жилами. Сопротивление изоляции для кабельных линий 2 МОм, для воздушных - 1 МОм.
6. МЕТОДЫ ОБЕСПЕЧЕНИЯ НАДЕЖНОСТИ ТЕЛЕКОМПЛЕКСОВ
6.1. В телекомплексах большое значение приобретает вопрос обеспечения высокой надежности. Особенно это относится к аппаратуре ПУ, так как при повреждении какого-либо аппарата КП теряется только часть информации, а при повреждении аппаратуры ПУ, исполняющей функции ЦППС, можно лишиться всей информации. Это относится и к комплексу средств отображения информации (КСОИ).
Для обеспечения высокой надежности и живучести комплекса принят ряд специальных мер. К важнейшим из них относятся:
- наличие в каждом устройстве и контроллере "сторожа", обеспечивающего автоматический рестарт при "зависаниях";
- резервирование устройства ПУ с арбитражем "основной резервный";
- аппаратная и программная поддержка резервных каналов связи;
- резервирование магистрали связи с КСОИ;
- автоматический контроль цепей ввода и вывода ТС;
- автоматический контроль цепей ввода и вывода ТУ;
- защита программ ТУ от аппаратных и программных сбоев;
- работа программ автодиагностики в реальном времени.
6.2. Неисправности, связанные с программными сбоями и "зависаниями", не всегда могут быть разрешены программным образом, так как сервисные программы-арбитры могут оказаться поврежденными сами. В таких случаях необходим аппаратный "сторож", который сохраняет пассивность до тех пор, пока служебная программа (могут быть использованы "часы") периодически "подкармливает" "сторожа". Очень важно, чтобы "сторож" реагировал не на "нуль" или "единицу" (в одном из таких состояний и останавливается устройство при повреждении), а на переход из "нуля" в "единицу" и/или наоборот. Важно реагировать на динамику процесса.
При длительном отсутствии "подпитки" "сторож" переходит в активное состояние, что вызывает рестарт комплекса.
Во время эксплуатации устройств возникает необходимость в проверке элементов защиты.
Для проверки работы "сторожа" достаточно с инженерного пульта однократно запустить ранее записанную в прикладное программное обеспечение (ПО) сервисную задачу с самозацикливанием (в такой задаче после ее выполнения управление процессором не передается "системе", а возвращается на вход этой же задачи: процесс зацикливается), после чего следует наблюдать отработку рестарта.
При отсутствии рестарта необходимо попытаться заменить модуль на резервный (если он имеется) и повторить проверку. По результатам проверки выполнить необходимые действия.
6.3. При проверке работы арбитра двухмашинного комплекса ("основной резервный") необходимо "согнать" процесс обработки с действующей в данный момент машины на другую. Для этого проще всего отключить питание действующей машины и убедиться, что переход на другую машину состоялся и принимаемая информация обновляется (что быстро обнаруживается по изменениям ТИТ).
6.4. Проверка аппаратуры смены каналов связи осуществляется поочередным их отключением (или шунтированием). Факт смены канала устанавливается по обновлению информации с данного направления.
6.5. Проверка резервирования магистральных линий КСОИ производится поочередным отключением каждой из двух линий.
6.6. Автоматический контроль цепей ввода-вывода осуществляется отключением шунтирующего резистора на контактах ТС и выемом сигнальных ламп из символов выключателей. Инженерный пульт (ИП) указывает поле неисправных ламп.
6.7. Работа автоматического контроля цепей ввода-вывода ТУ определяется (при отключенных реальных объектах управления) посредством имитации повреждения реле (путем насильственного его удержания в требуемом положении) и печатных плат. Необходимо убедиться в том, что при неисправных элементах блоков ТУ команды телеуправления не исполняются. В нормальных условиях ТУ работает.
7. МЕТОДИКА ИСПОЛЬЗОВАНИЯ СЕРВИСНЫХ СРЕДСТВ В ТК МПТК
7.1. К сервисным средствам комплекса относятся ИП и вспомогательные модули УП и КС, а также сервисные программы, предназначенные для обслуживания ИП, который является средством общения между персоналом и устройствами комплекса.
Инженерный пульт содержит:
- 16-разрядный цифровой индикатор;
- 16 светодиодов для индикации двоичной информации;
- 16 функциональных клавиш;
- 16 цифровых клавиш;
- программатор для записи информации в микросхемы ППЗУ.
Важным свойством сервисных программ МПТК является то, что они выполняются под управлением системы реального времени и поэтому применимы во время работы комплекса прикладных программ. Во многих ТК при работе с сервисными средствами требуется останавливать рабочую программу.
Основными операциями, которые выполняются с помощью ИП, являются чтение ячеек памяти, запись в ячейки памяти, запуск программы с заданного адреса. Существенную помощь при анализе работы комплекса с помощью ИП оказывает наличие периодического режима операций чтения и запуска программы.
7.2. При локализации неисправности и во время ремонта аппаратуры возникает необходимость доступа к элементам печатной платы.
В некоторых УТМ для наблюдения за осциллограммами приходится многократно вынимать печатные платы из каркаса, чтобы подпаять контрольные провода к интересующим точкам схемы. Этот метод сопряжен с неудобствами и требует максимальной концентрации внимания ремонтного персонала, чтобы по возможности сократить число операций.
Простая плата-переходник (тем более со жгутом) не всегда разрешает задачу, так как при неизбежном в этом случае увеличении паразитных емкостей и индуктивностей (заметных при больших скоростях обмена сигналами в современных устройствах) вынесенная на переходник исследуемая плата часто перестает работать.
При ремонте плат в МПТК следует пользоваться специально разработанным модулем УП, который позволяет вывести подлежащий проверке модуль за габариты "материнского" блока. Для уменьшения неприятных эффектов (связанных с удлинением "шины") в модуле установлены интерфейсные усилители. На модуле УП установлен дополнительный разъем, позволяющий подключать ИП.
7.3. При отладке и проверке работы программ прикладного ПО (собственных или штатных) необходимы инструментальные средства, позволяющие перевести работу процессора в пошаговый режим. Для этой цели в МПТК следует использовать контрольный модуль КС.
8. МЕТОДИКА ОТЫСКАНИЯ НЕИСПРАВНОСТЕЙ В УТМ И ТК (Словесный алгоритм)
Оперативным или дежурным персоналом обнаружена неисправность (или эксплуатационным персоналом при очередном осмотре устройств).
Уточняется характер неисправности. При прекращении исполнения устройством какой-либо функции проверяется исполнение других функций.
Производится визуальный контроль состояния устройства, наличие всех питающих напряжений (по сигнальным элементам и/или измерительным приборам).
При отказе от исполнения одной из функций необходимо более тщательно обследовать источники питания, относящиеся к этой функции. Проверяется значение пульсации (осциллографом).
При отказе от исполнения устройством одновременно многих функций необходимо детально обследовать источники питания на наличие и допустимые разбросы напряжений и пульсаций.
Увеличение значений пульсаций может быть вызвано частичной потерей электрической емкости (высыханием) электролитических конденсаторов, внутренним повреждением (обрывом) токовыводящих элементов конденсаторов или плохими контактами.
8.1. Источники питания, содержащие стабилизаторы напряжения с непрерывным регулированием
8.1.1. Проверяется наличие напряжения в питающей сети, целостность шнуров питания и предохранителей.
Дальнейшие действия производятся в следующем порядке:
плавно поднимается входное напряжение от нуля до 10% номинального значения с постоянным контролем выходных напряжений всех источников блока;
в исправном блоке питания должна сохраняться пропорциональная зависимость изменения всех выходных напряжений от входного (так как при таких малых входных . напряжениях электронные стабилизаторы еще не выходят на режим стабилизации и поэтому все источники ведут себя как нестабилизированные);
при обнаружении нарушения пропорциональности изменения напряжения какого-либо источника дальнейшее увеличение входного напряжения необходимо прекратить и отключить блок питания до выяснения причины;
во время проверки необходимо следить за температурой регулирующих транзисторов, хотя их нагрев даже при коротком замыкании в нагрузке маловероятен из-за малого входного напряжения;
после выяснения и устранения причины непропорционального изменения напряжений включается блок питания на
полное напряжение и некоторое время продолжается визуальный контроль.
8.1.2. Во время эксплуатации в стабилизаторах блоков питания наиболее часто повреждаются мощные регулирующие транзисторы, электролитические конденсаторы, резисторы и обмотки трансформаторов и дросселей.
8.1.3. При проверке и ремонтно-наладочных работах возникает необходимость в определении работоспособности элементов без выпаивания их из монтажной платы. Во время проверки блоков питания вместо реальной нагрузки следует подключить ее эквивалент.
8.1.4. Исправность трансформаторов, дросселей проверяется по падению напряжения на их входах и выходах.
8.1.5. Для проверки электролитических конденсаторов (после длительной эксплуатации и при нагреве они высыхают и теряют электрическую емкость) необходимо параллельно исследуемому конденсатору подключить заведомо исправный такой же емкости (и с не - меньшим рабочим напряжением). Осциллографом контролируется изменение значения пульсации на исследуемом конденсаторе после подключения дополнительного. При поврежденном исследуемом конденсаторе значение пульсации уменьшится во много раз, в то время как при исправном - примерно в два раза.
8.1.6. Для проверки состояния резисторов необходимо параллельно исследуемому подключить дополнительный, сопротивление которого в десять раз больше, и проконтролировать падение напряжения на исследуемом до и после подключения дополнительного.
При исправном исследуемом резисторе значение падения напряжения уменьшится примерно на 10%. При значительном изменении падения напряжения делается вывод о неисправности исследуемого резистора.
8.1.7. Для облегчения работы измерения лучше производить не стрелочным, а цифровым мультимером. Все возмущения в режимах (за счет подключения дополнительных резисторов) не должны вызывать необратимых разрушительных последствий, так как они укладываются в допустимую погрешность самих резисторов.
8.1.8. Точно определить характеристики транзисторов без выпаивания их из рабочей схемы затруднительно, но определить их работоспособность возможно. Для этого в базу исследуемого транзистора через внешний резистор (как правило, для мощных регулирующих транзисторов достаточно 5-10 кОм) подается дополнительный ток (ΔI, который можно измерить прибором непосредственно) и контролируется приращение тока в коллекторной цепи (по изменению тока во внешней нагрузке или по приращению напряжения на известной внешней нагрузке). Если транзистор обладает усилительными свойствами (исправен), то приращение его коллекторного тока будет во много раз больше приращения тока базы (в абсолютных значениях). В противном случае исследуемый транзистор следует считать заведомо неисправным.
8.2. Источники питания, содержащие стабилизаторы напряжения с импульсным регулированием
8.2.1. В отличие от стабилизаторов напряжения с непрерывным регулированием устройство стабилизаторов с импульсным регулированием значительно сложнее. Проверка элементов без выпаивания их из монтажной платы такая же, как описано выше. Однако сама проверка возможна лишь в работающем стабилизаторе. Необходимым условием работы импульсного стабилизатора является его "возбуждение". Существуют схемы стабилизаторов с независимым (от автономного генератора) возбуждением и схемы с самовозбуждением.
В наиболее тяжелых условиях работает узел коммутации постоянного тока. Обычно ему приходится коммутировать ток напряжением более 310 В (220 В + 15% = 253 В х 1,41 = 357 В). В режимах отсечки (открыт или заперт) на коммутирующем элементе выделяется сравнительно небольшая мощность.
Наибольшая мощность выделяется в момент переключения (когда напряжение на коммутирующем элементе составляет половину питающего).
8.2.2. Для уменьшения рассеиваемой на коммутирующем элементе мощности необходим управляющий сигнал с крутыми фронтами и амплитудой, достаточной как для надежного насыщения коммутирующего элемента, так и для его надежного запирания. При проверке работы стабилизатора следует обратить внимание на температуру коммутирующих элементов. При сильном нагреве необходимо проверить параметры управляющего сигнала и его частоту. Поскольку коммутирующие элементы находятся в тяжелых условиях работы (особенно по напряжению) не следует стабилизатор с импульсным регулированием оставлять без нагрузки. Без внешней нагрузки на фронтах импульсов возникают перенапряжения из-за ЭДС самоиндукции силового трансформатора, что, как правило, приводит к электрическому пробою коммутирующих элементов. Но даже, если пробоя не произошло, успокаиваться не стоит. Элементы как бы накапливают "неприятности" и в следующий раз могут выйти из строя при меньших нагрузках.
8.3. Центральный процессор
8.3.1. При исправном блоке питания следует перейти к проверке работы платы центрального процессора (ЦП). Необходимо запустить в работу тестовые программы. В случае неуспешной работы тестовых программ следует заменить (при наличии) комплект плат ЦП (сам ЦП, плату памяти, плату выходных портов для внешних устройств) на заведомо исправные.
Возможные методы тестирования после замены:
тестовые программы работают успешно;
тестовые программы не работают.
В первом случае неисправность в замененных платах. Во втором случае неисправность в соединительных цепях. При дефектации модуля ЦП прежде всего необходимо провести его внешний осмотр на наличие дефектов, таких, как:
царапины, нарушающие токоведущие цепи;
замыкания между выводами соседних конденсаторов или их контактов с печатными проводниками плат;
замыкания металлизированных дорожек или выводов между собой посторонними токоведущими материалами.
8.3.2. Следует установить плату ЦП на переходный жгут (или переходную ремонтную плату) и исследовать питающие напряжения непосредственно на самих микросхемах платы. Проверить наличие импульсов тактового генератора (если он установлен вне резидентной платы).
Проверить наличие напряжения от источника отрицательного смещения для питания БИС (обычно такой источник организуется на самой плате, а не в блоке питания).
Проверить наличие сигналов прерывания от таймера.
Проверить наличие сигналов на управляющих выходах БИС ЦП и на всех выходах магистральной шины. Проконтролировать, чтобы все разряды магистральной шины доходили до контактов микросхем резидентной памяти оперативного запоминающего устройства (ОЗУ) и постоянного запоминающего устройства (ПЗУ). Осмыслить содержание сигналов при такой проверке не удастся, но проверка позволяет понять, что проводники не разорваны и не закорочены.
Все обнаруженные неисправности необходимо сразу устранять, так как работа микросхемы на закороченный проводник (или проводник, ошибочно соединенный с другим проводником) недопустима. Такой режим приводит к "конфликту на шинах", что вызывает постепенное разрушение микросхемы и преждевременный выход ее из строя.
Для более полного обследования работы ЦП необходимо знание его технических особенностей по материалам технического описания и принципиальных схем.
8.3.3. После выполнения перечисленных работ надо перевести процессор в пультовый режим и попытаться проверить выполнение элементарных функций (открыть ячейку памяти, изменить ее содержание, "набить", запустить и проверить правильность выполнения простой программки). При неправильной работе следует продолжить обследование.
8.4. Оперативное запоминающее устройство
8.4.1. В последних телекомплексах в качестве ОЗУ наиболее часто применяются микросхемы К537. Микросхема замечательна во всех отношениях (объем памяти, быстродействие, потребление, надежность), однако требует внимательного отношения при монтаже и хранении. Совершенно недопустимо при хранении оставлять выводы микросхемы без фольговой обертки, так как наведенная на выводах ЭДС вызывает необратимый электрический пробой. При монтаже необходимо соблюдать аккуратность (по причине наведенной ЭДС).
Микросхема К537 имеет свои режимные требования. После операции "выбор кристалла" нельзя изменять режим "чтение/запись" (сигнал "выбор кристалла" должен поступать на микросхему последним). Несоблюдение этого требования приводит к "необъяснимым" повреждениям микросхемы.
8.4.2. Внешним осмотром проверить отсутствие таких дефектов, как:
царапины, нарушающие токоведущие цепи;
замыкание металлизированных дорожек или выводов интегральных микросхем посторонними токопроводящими материалами;
ошибочно установленные перемычки или неправильное положение движков модульных выключателей.
Проверяется наличие всех требуемых питающих напряжений.
Много неприятностей связано с плохими контактами в подсхемниках для микросхем. Лучшими являются подсхемники с позолоченными выводами иностранного производства.
Перед установкой на место выводы микросхем необходимо механически отформовать. После установки микросхем на место их следует несколько раз подвигать вперед и назад вдоль собственной оси ("притереть" контакты).
8.4.3. В том случае, когда микросхемы ОЗУ устанавливаются на подсхемниках, необходимо удостовериться в наличии электрических контактов. Для этого проверку наличия сигналов производят непосредственно на самих выводах микросхем.
8.5. Интерфейсы
8.5.1. При внешнем осмотре выявляются все дефекты, которые были описаны выше. Правильно работающий интерфейс должен обеспечивать связь ЦП со своим периферийным устройством (включая терминал). Для проверки работы интерфейса после подачи питания контролируется выход комплекса на связь с пультовым терминалом. При отсутствии связи с терминалом наиболее вероятна неисправность канальных приемопередатчиков или внутренних логических схем интерфейса, обеспечивающих их работу.
8.5.2. Проверка интерфейсов сходна с проверкой магистральных шин. Не углубляясь в структуру сигналов, на первых порах необходимо проверить все цепи на "живучесть" (наличие изменяющихся сигналов). Проверку надо начинать с конца, т.е. непосредственно у потребителя интерфейсных сигналов. Линия (цепь), на которой обнаружен постоянный уровень сигнала, подлежит более тщательной проверке. Теперь нужно убедиться в наличии сигналов на выходе из источника. По возможности нужно отключить нагрузки, чтобы исключить их шунтирующее действие. Если сигналы на выходе есть, то нужно двигаться по линии, контролируя их прохождение. При отсутствии сигналов без нагрузки необходимо изменить направление обследования и проверить цепи управления источника.
8.5.3. Наиболее частые случаи повреждения интерфейсов:
плохие пайки плоских жгутов ("ремней") к печатным платам и разъемам;
замыкания припоем на платах и разъемах;
внутренние обрывы токоведущих жил в плоских жгутах.
Такие дефекты обычно вызывают повреждение источников сигналов и значительно реже повреждение потребителей.
9. ОРГАНИЗАЦИЯ ТЕХНИЧЕСКОЙ УЧЕБЫ ЭКСПЛУАТАЦИОННОГО ПЕРСОНАЛА
Вопросы для проверки знаний эксплуатационного персонала рекомендуется условно скомпоновать в отдельные группы.
В первую группу входят вопросы, относящиеся к функциональным возможностям аппаратуры.
Знания по этим вопросам полезны при замене старого, отслужившего оборудования в соответствии с "Руководящими указаниями по критериям оценки технического состояния аппаратуры телемеханики энергосистем с целью определения необходимости ее замены или реконструкции: РД 34.48.511-96" (М.: СПО ОРГРЭС, 1997) или при телемеханизации вновь вводимого энергообъекта.
Ниже приводится примерный перечень вопросов по первой группе:
1. Функциональные возможности комплекса и предполагаемый к применению уровень в иерархической структуре диспетчерского и технологического управления.
2. Возможные варианты конфигурации комплекса, предельный вариант.
3. Климатические характеристики аппаратов комплекса.
4. Информационные объемы комплекса по отдельным функциям.
5. Параметры электропитания, возможность резервирования питания.
6. Конструктивное исполнение комплекса, варианты компоновки.
Во вторую группу входят вопросы, связанные с точностью передачи телемеханической информации по всему тракту передачи (сквозная погрешность телеизмерения).
Погрешность телеизмерения обусловлена несколькими составляющими. Для комплексов, использующих при передаче информации цифровые коды, погрешность определяется следующими составляющими:
- погрешность первичного датчика-преобразователя измеряемого параметра в нормированный аналоговый сигнал (напряжение или ток);
- погрешность преобразователя аналог-код (АЦП), из которой следует отдельно рассмотреть погрешность квантования:
- погрешность преобразователя код-аналог (ЦАП) при аналоговом воспроизведении информации;
- погрешность аналогового прибора (при аналоговом воспроизведении телеизмерения).
Принципы, используемые в старых датчиках (ВАПИ, СВПА), не позволяли получать приборы высокого класса точности, но даже точность, достигнутую сразу после настройки датчика, не удавалось сохранять в течение длительного времени. Кроме того, датчики ВАПИ имели большую нелинейность характеристики. При измерении отдельного параметра нелинейность удавалось компенсировать соответствующей градуировкой аналогового прибора на диспетчерском пункте. При телеизмерении суммарного значения от нескольких датчиков погрешность бывала недопустимо большой и изменялась с изменением соотношения отдельных слагаемых.
На фоне такой погрешности погрешность квантования оказывалась в несколько раз меньшей и не являлась определяющей.
С переходом к производству датчиков, работающих на новом принципе (датчики серии Е Витебского завода), имеющих класс точности 1,0; 0,5 и даже 0,2, влияние погрешности квантования стало существенным (при восьми разрядах кода ТИ - 0,4%).
Преобразователи аналог-код современных комплексов позволяют уменьшить погрешность квантования (при увеличении количества разрядов кода ТИ). Предел уменьшения погрешности квантования определяют внутренние шумы собственно преобразователя. Практически получают "повторяемый" код, состоящий из 10-14 разрядов (0,1 -0,00625%). Погрешность квантования при этом исчезающе мала.
Понимание материала, входящего во вторую группу вопросов, позволяет эксплуатационному персоналу выделять из всех составляющих наиболее существенные погрешности и эффективно влиять на точность передачи телеинформации в целом.
Рекомендуемый перечень вопросов второй группы:
1. Значения основной и дополнительных погрешностей тракта телеизмерения при цифровом и аналоговом воспроизведении.
2. Принятые для телекомплекса диапазоны изменения аналоговых сигналов от датчиков.
3. Значение входных сопротивлений по каналам телеизмерений комплекса.
4. Погрешности АЦП телекомплекса, основная и дополнительные.
5. Погрешности ЦАП телекомплекса, основная и дополнительные.
Предыдущие вопросы относятся к метрологическим. Существует жесткая зависимость между быстродействием и точностью. Уменьшение погрешности квантования приводит к увеличению разрядности передаваемой информации и, как следствие, времени ее передачи. Наряду с уменьшением метрологической погрешности, происходит возрастание динамической погрешности, связанной с задержкой передаваемой информации в канале связи и, следовательно, с возможным несоответствием принятой информации фактической на этот момент времени. Особенно это бывает заметно при измерении межсистемного перетока мощности с двух концов одной и той же линии электропередачи. Из-за разной задержки измерений невозможно бывает добиться одинаковых результатов, хотя метрологическая сторона процесса измерения в полном порядке. Возникают трудности и с определением баланса мощностей. Уменьшить динамическую погрешность можно тремя способами:
- увеличить скорость передачи информации по каналу связи;
- затрубить динамическую характеристику измеряемых процессов значительным интегрированием результатов измерения;
- сопровождать результат измерения меткой точности времени.
Первый способ может быть невыполним из-за ограничения пропускной способности канала связи. Второй способ не позволяет регистрировать мгновенные значения измерений (что бывает необходимо при анализе устойчивости в энергосистеме). Третий способ требует специальных датчиков точного времени и изменения структуры передаваемых кодов.
Следует отметить, что проблемы динамической погрешности менее всего известны эксплуатационному персоналу и на них надо обратить особое внимание.
Вторая группа дополняется вопросами 6 - 8:
6. Скорость передачи информации по каналам связи.
7. Время передачи сообщения (телеизмерения) при нормальном режиме работы комплекса и в аварийном режиме (когда происходят групповые переключения телесигналов и изменения нескольких телеизмерений).
8. Динамическая погрешность и способы ее уменьшения.
В телемеханике много внимания уделяется повышению надежности и достоверности передаваемой информации. Этот материал входит в третью группу вопросов:
1. Показатели достоверности передачи информации для ТС, ТИТ, ТИИ и для ТУ и способы ее достижения.
2. Сервисные и контрольные узлы для наблюдения за работой комплекса в нормальном режиме.
3. Средства профилактического контроля аппаратуры, обнаружения и локализации неисправности.
4. Принципы работы автоматического контроля исправности цепей связи с датчиками и контроля исправности ламп накаливания щита.
5. Средства программирования микросхем перепрограммируемого запоминающего устройства (ППЗУ) для привязки к конкретным условиям эксплуатации.
Программное обеспечение телекомплекса рассматривается в четвертой группе вопросов:
1. Структура программного обеспечения, наличие супервизора реального времени, сервисные программы, прикладные программы, контрольно-тестовые программы.
2. Структура системного интерфейса.
3. Организация прерываний, система приоритетов.
В пятую группу входят вопросы, относящиеся к программируемым модулям телекомплекса:
1. Модуль центрального процессора.
2. Модуль памяти.
3. Модули канальных адаптеров, данные по стыковке с каналами связи, конфигурация каналов связи, скоростные характеристики.
Шестая группа вопросов включает устройство и работу периферийных аппаратных модулей ввода и вывода и преобразователей информации:
1. Модуль АЦП.
2. Модуль ЦАП.
3. Модуль ввода ТС.
4. Модуль вывода ТС или блок щитового контроллера.
5. Модуль ТУ.
6. Блок питания.
При эксплуатации телемеханических комплексов возникает необходимость в ремонте и наладке аппаратуры.
Вопросы, относящиеся к этой теме, рекомендованы в седьмой группе:
1. Способы определения неисправности радиоэлементов (транзисторов, диодов, резисторов, конденсаторов, трансформаторов) без выпаивания из схемы и без разрушения исследуемых модулей (блоков).
2. Способы определения неисправности и ремонта электрических компонентов интерфейса.
Выше описаны общие вопросы настоящей Методики.
В приложениях 1-5 приведена конкретная методика эксплуатационного обслуживания аппаратно-программных средств ТК "ГРАНИТ".
Приложение 1
МЕТОДИКА РАБОТЫ С БЛОКОМ ВНЕШНЕГО ЗАПОМИНАЮЩЕГО УСТРОЙСТВА (ВЗУ), БЛОКОМ СИСТЕМНОЙ ЦЕНТРАЛИ (СЦ) И С КОНТРОЛЛЕРОМ ВНУТРИБЛОЧНОЙ МАГИСТРАЛИ (КВМ) В ТК "ГРАНИТ"
1. Состав блока ВЗУ типа ПП-01
Блок ВЗУ состоит из четырех типов субблоков ПП-011, ПП-012, ПП-013, ПП-014. Субблок ПП-011 устанавливается в разъем каркаса микроЭВМ. Остальные субблоки размещены в отдельном блок-каркасе. Связь между субблоками ПП-011 и ПП-012 осуществляется с помощью плоского жгута.
Адреса обращения микроЭВМ к блоку ВЗУ:
173100, 173102, 173104, 173106.
Программное обеспечение в виде файлов записано на платах ПП-013. На одной плате находится 16 микросхем ППЗУ (тип К573РФ2), каждая из которых - 2 Кбайта. На объем памяти с адресами от 0 до 77768 включительно требуется две микросхемы. В одной записан младший байт слова, в другой - старший. На дисплей слово выводится для чтения восьмеричным кодом (шесть разрядов).
2. Проверка блока ВЗУ типа ПП-01
2.1. Проверяемую плату ПП-013 установить на переходный жгут-удлинитель. Плата может устанавливаться на одно из четырех мест блок-каркаса:
| 4-я | 3-я | 2-я | 1-я | 1-я | 0-я | 1-я | 0-я | свободное |
|
|
|
|
|
|
|
| место |
ПП | ПП | ПП | ПП | ПП | ПП | ПП | ПП | ПП |
014 | 014 | 014 | 014 | 013 | 013 | 013 | 013 | 012 |
2.2. Плату с ППЗУ типа ПП-013 с тестами установить в 0-й блок, 1-я плата, а проверяемую в 1-й блок, 3-я плата.
Запустить тест ППЗУ: RU________TVZU ВК.
пробел клавиша
Далее с дисплея провести диалог с микроЭВМ:
а) выбрать тест ППЗУ, 1-й блок, 1-ю плату (в блоке она 1-я) и нажать клавишу 2 (выполнение теста);
б) микроЭВМ через платы ПП-011, ПП-012 "посылает" к плате ПП-013 сигналы (импульсы) чтения, записи, данные и адреса ячеек ППЗУ. Если никаких импульсов нет, следует:
- проверить контакты в разъеме платы ПП-011;
- проверить контакты в жгуте, соединяющем ПП-011 и ПП-012;
- последовательно заменить плату ПП-011, ПП-012, ПП-013.
При работе теста на экране дисплея последовательно указывается адрес ячейки, в которую обеспечивается возможность записи и чтения. Адреса ППЗУ на плате ПП-013 распределяются следующим образом:
Старший | Младший | Адреса для | Адреса для |
байт | байт | 0-й платы | 1-й платы |
|
| 0-777688 | 10000008-1077768 |
|
| 100008-1777б8 | 1100008-1177768 |
|
| 200008-277768 | 120000-127776 |
|
| 300008-3777б8 | 130000-137776 |
|
| 400008-4777б8 | 140000-147776 |
|
| 500008-577768 | 150000-157776 |
|
| 600008-677768 | 160000-167776 |
|
| 700008-7777б8 | 170000-176776 |
Пока тест обслуживает адреса от 0 до 7776, на выходе микросхемы Д7 (вывод 9) или микросхем Д11, Д12 (выводы 20) должен наблюдаться импульс, частота появления которого соответствует частоте записи очередной строки на дисплее. Пользуясь ждущей внутренней разверткой осциллографа, можно наблюдать факт наличия развертки луча (а не сам импульс).
Следует убедиться в наличии импульсов на всех ППЗУ по мере увеличения адресов обращения к ППЗУ. Возможны случаи непропаянных ножек подсхемников для ППЗУ.
Чтобы перейти к очередной паре ППЗУ, нужно:
- нажать кнопку на блоке Р-25 пульт/программа, т.е. остановить тест;
- записать в регистр RO (RI) новый адрес;
- нажать клавишу Р (лат.) на клавиатуре дисплея.
Тест будет продолжен с нового адреса.
Одновременно с проверкой исправности микросхемы Д7 проверяется наличие импульсов на выходе Д8 (или 18 ножки ППЗУ).
Далее следует проверить исправность четырех шинных формирователей Д1-Д4. Если гарантированно стереть информацию во всех ППЗУ ультрафиолетовым излучением, то последовательно во всех адресах должны "читаться" только "1".
Наличие в каком-либо разряде постоянного "О" по всем адресам свидетельствует о неисправности шинного формирователя Д1-Д4 (шин К589АП26).
Чтобы определить, какой именно формирователь неисправен, следует определить номер разряда по слову, читаемому из ППЗУ.
Если информация в ППЗУ читается правильно, но при нажатии кнопки "PGM" на плате (эта кнопка подает 25 В на 21-й вывод всех ППЗУ) 1 бит в слове выставляет "О", то возможная причина - неисправная ППЗУ.
Таким образом, прежде, чем приступить к записи программ, необходимо проверить исправность всех элементов платы ПП-013 (при условии исправности ПП-011, ПП-012).
Для того, чтобы прочитать слово (два байта), следует провести с дисплея (консоль) следующие операции:
Открыть ячейку регистра состояния платы ПП-011
173100/000200 1 "ПС",
где 173100/ печатает оператор;
000200 печатает ЭВМ в ответ на /;
1 печатает оператор, т.е. в данном случае выбран номер блока 1;
"ПС" клавиша ПС на клавиатуре.
После нажатия клавиши "ПС" в регистр состояния записана 1 (000200 означало, что регистр был "готов" принять команду), далее открывается регистр для записи адреса ячейки:
173102/000002 "ПС",
где 000002, например, адрес ячейки 000002.
После нажатия клавиши "ПС" в регистр адреса записан адрес, и ЭВМ выводит регистр записи: 173104/.
Если оператор запишет число в этот регистр и нажмет клавишу "ВК", то по выбранному адресу будет записано число, указанное в регистре 173104/число, нажать клавишу "ВК".
Причем для этого нужно, чтобы ячейка была подготовлена для записи, т.е. в ней было 17777778 и предварительно нажата клавиша "PGM" на плате ПП-013, в которую производится запись.
Если же оператор не будет записывать в регистр 173104, а нажмет клавишу "ПС" (а не "ВК"), то откроется регистр чтения 173106/число (указывает содержимое слова, адрес которого в ячейке 173102).
По окончании следует нажать клавишу "ВК".
3. Методика работы с блоком системной централи
3.1. Контроллер связи радиальный (КСР) обеспечивает связь микроЭВМ с функциональными элементами телекомплекса в составе аппарата ПУ.
Конструктивно КСР состоит из пяти субблоков, устанавливаемых в компоновочный каркас (КК), и одного субблока КС52.31.6, вставляемого в "корзину" ЭВМ.
Контроллер работает в следующих режимах:
передача информации от ЭВМ и записи в буфер СЦ;
считывание информации из буфера СЦ и передача ее в один из каркасов с функциональными блоками (ФБ);
опрос состояний КК на предмет наличия информации для съема;
прием информации из КК и запись ее в буфер СЦ;
считывание информации из буфера СЦ и передача ее в ЭВМ.
Количество КК - от 1 до 16. Скорость обмена информацией между ЭВМ и КСР - 20000 слов в секунду. Скорость передачи/приема информации в/из КК - 18000 Бод. Емкость входного и выходного буфера 32 байта.
3.2. Плата КС52.31.6, установленная в "корзину" ЭВМ, должна проводить все операции в режимах, указанных выше, через регистр команд состояния 175770 и регистр данных 175772. Оператор печатает на дисплее адрес указанного регистра команд 175770/. Если появляется/?, то либо какая-то плата "портит" шину, либо плохо вставлена плата КС52.31.6, либо эта плата неисправна. Как и во всех случаях, нужно разгрузить "корзину" от других плат и от жгута, соединяющего плату КС52.31.6 с блоком СЦ.
Неисправный блок в составе платы КС52.31.6 определить последовательно, заменяя блок за блоком на заведомо исправный.
Ремонт субблока проводить, изучив принципиальную схему СЦ по заводскому описанию.
4. Регистры команд и состояний в функциональных блоках ТК "ГРАНИТ"
Ввод информации в ЭВМ и вывод ее из ЭВМ может происходить как по прерыванию, так и по флагу готовности. При работе по прерыванию ЭВМ должна выдать разрешение прерывания, установив соответствующий разряд согласно табл. 1. При этом на соответствующих выходах регистра разрешения прерываний Д14 (микросхема В5/выводы 7, 10, 15) появится сигнал "1". Далее сигналы готовности из СЦ взводят триггер Д18.1 (микросхема Б3/ножка 5) - требование прерывания (ТПР) в ЭВМ. В ответ ЭВМ выставляет сигнал "К ВВОД Н" и "К ППР (1) Н". При этом взводится триггер Д18.2 (Б3/9) и сбрасывается Д18.1. Элементом Д27.2 (А2/6) запрещается распространение сигнала предоставления прерывания "К ППР (0) Н". Одновременно элементами Д17 (Е2/6, Е2/8), Д27.4 (А2/12), Д28 (В2/3, б, 9, 12) формируется вектор прерывания согласно табл. 2.
Таблица 1
Разряд | Назначение разрядов в регистрах команд и состояний |
0-1 | Код управления мультиплексором СЦ (табл. 3) |
2 | Ввод данных из СЦ |
3 | Ввод данных из MHO |
4 | Вывод данных в СЦ |
5 | Вывод данных в ММО |
6 | Конец ввода из СЦ |
7 | Конец вывода в СЦ |
8 | Разрешение прерывания по готовности ввода из СЦ |
9 | Разрешение прерывания по готовности ввода из ММО |
Таблица 2
Требование пребывания | Вектор |
Готовность ввода в СЦ | 200 |
Готовность приемника ММО | 204 |
Готовность вводы из ММО | 214 |
Готовность ввода из СЦ | 234 - самый высокий приоритет |
Таблица 3
Значение разряда |
| |
1-й разряд | 0-й разряд | Вводимые в ЭВМ данные |
0 | 0 | Первое слово состояния (СС-1) |
5. Контроллер внутриблочной магистрали (КС59.10.1.2, 3)
Алгоритм обмена информацией (сигналами) между ФБ и КВМ.
5.1. Если ЛУ0 готов принять данные от функциональных блоков КК, т.е. он выставил сигнал ГПР ЛУ0 (при этом он не выставил готовность передать данные в сторону ФБ, которому отдан приоритет, и это не случай магистрального канала), то КВМ последовательно с частотой 72 кГц "обегает" ФБ и анализирует от них сигналы ГПР и ГПД. Для этого КВМ выставляет по индивидуальным шинам сигналы АФБх = 1 и общий сигнал "опрос готовности" (ОГ).
ВНИМАНИЕ! Если один и тот же ФБ в одном месте КК не работает, а в другом работает, то следует проверить сигнал АФБХ от КВМ. Возможно имеет место повреждение выхода микросхемы в КВМ.
5.2. Если обнаружен сигнал ГПР = 1 от ФБ, то события происходят в следующей последовательности: КВМ выдает в ЛУ0 единицу и тактовые импульсы, включает кодер, формирует байты номера КП (NКП), номера ФБ (NФБ), два байта NФБ в распределительном коде, два байта кода результата деления всей информации на полином 16-й степени. После выдачи 2-го байта КПК КВМ снимает сигналы АФБ ЛУ0 и ТИ ЛУ0, приводит в исходное состояние шины КОМ и возвращается в начало.
Из вышеприведенного описания следуют эксплуатационные рекомендации:
если номер контролируемого пункта выдается неверный, то следует проверить правильность установки перемычек на ряде выводов (но не исключено также повреждение микросхемы);
если не соблюдается последовательность взаимодействия сигналов, то можно оценить, какой из ФБ неисправен, т.е. ЛУ0, КВМ или ФБ, либо общая шина, на которую работают все ФБ. В этом случае нужно "разгружать" шину последовательно, выставляя другие ФБ из КК.
Приложение 2
ОРИЕНТАЦИЯ В ПРОГРАММНОМ ОБЕСПЕЧЕНИИ ТК "ГРАНИТ"
При нажатии кнопки "сброс" (красная кнопка на фасаде ФБ типа Р-25) программный счетчик процессора микроЭВМ устанавливается на адрес 1730008 и начинается выполнение блока команд, в результате чего в оперативную память загружается программа начальной загрузки, которой передается управление.
В ПЗУ, размещенном на интерфейсной карте ПП-011, начальный адрес 1730008. Карта вставлена в каркас микро-ЭВМ, через нее (карту) реализована связь ЭВМ с внешней памятью ВЗУ, на платах (ПП-013) которого записано все базовое программное обеспечение (БПО).
Если загрузка не начинается вообще, то следует с дисплея обратиться по адресу 173000/... ВК. При ответе в виде знака ? нужно заменить плату ПП-011 (или проверить установку ее в разъем). Возможно, что какая-либо интерфейсная карта в каркасе ЭВМ неисправна и "портит" общую шину микроЭВМ. Для поиска - последовательно разгрузить каркас ЭВМ, оставляя только ПП-011.
В случае отсутствия всякой реакции на нажатие кнопки "сброс" на Р-25 следует заменить ФБ Р-25.
Программа начальной загрузки загружает в ОЗУ микроЭВМ программные модули в соответствии с картой загрузки GRANIT. Названия загружаемых модулей во время загрузки появляются на экране дисплея-консоли.
Порядок загрузки следующий:
SPR - операционная система;
DVR-01 - драйвер системного терминала (консоли);
DVR-02 - драйвер дисков НГМД;
DVR-07 - драйвер ВЗУ;
DVR-08 - драйвер системной централи, т.е. ФБ, связывающего микроЭВМ со всеми КК;
DVR-09 - драйвер передатчика канала ММО;
DVR-10 - драйвер приемника канала ММО;
DVR-11 - драйвер удаленного диспетчерского дисплея;
ДФА - программа диспетчер функционального адреса;
ТIT - программа обработки текущих телеизмерений;
ТII - программа обработки интегральных телеизмерений;
TS - то же телесигнализации;
IS - программный интерфейс связи программных модулей;
INIT - программа для ММО;
LOADR- перемещающий загрузчик;
СТI - программа для управления технологической информацией на диспетчерском дисплее;
ВС/Р - программа для вывода "бегущей" строки;
ТU - программа организации посылок ТУ;
ДРТU - программа, обеспечивающая ТУ с диспетчерского дисплея;
SUF - система управления файлами;
DS - диспетчер локальной сети (для диспетчеризации отправления посылок от ПУ к КП).
Далее формируются системно распределенная область, таблица прерываний, в которой каждому "вектору" соответствует адрес описателя задачи (программы) или адрес секции продолжения драйвера, генерируются телемеханические таблицы, отводится место в ОЗУ под текущую телемеханическую базу, выводятся на консоль слова: ОС РВ ГРАНИТ ВО 1, а на дисплей диспетчера выводится слово RESTART.
Далее загружается программа клавиатурный монитор, открывается прерывание СЦ и, если есть на ВЗУ файл BAZA.M/C, через СЦ производится обращение к каждому линейному узлу, указанному в базе. Принимаемая информация от КП записывается в ОЗУ микроЭВМ и на ВЗУ на VZ в файл BAZA.TAB. (При отсутствии на ВЗУ файла BAZA.M/C об этом выводится сообщение на консоль). Далее управление передается клавиатурному монитору, который выводит на терминал (консоль) знак точки ".".
В процесс загрузки ОС РВ ГРАНИТ могут на системном терминале появляться сообщения о том, что та или иная программа не загрузилась в ОЗУ, т.е. в соответствии с картой загрузки GRANIT программа должна загружаться в ОЗУ микроЭВМ, а она не загрузилась.
Причиной такого сообщения чаще всего является искажение программы на ВЗУ. Программа может загружаться с ППЗУ PZ: (платы ПП-013) или памяти VZ: (платы ПП-014).
Те же действия следует проделать с файлом на PZ:, но для записи на PZ: нужно иметь свободное место достаточного объема, иначе придется стирать все файлы и записывать их заново, что крайне трудоемко. Чтобы этого не делать, следует обеспечить платы VZ: (ПП-014) непрерывным электропитанием от батареи постоянного тока.
При загрузке файлов с НГМД возможен случай: обращение к диску происходит, а загрузка не производится. Причиной такого явления может быть неисправность платы ПП-014 (VZ:), на которой находится файл DISK для загрузки с НГМД.
Возможно, что после загрузки на системный терминал будет выведено сообщение:
ССТ ОШ. обл. 5
Это происходит потому, что в файле BAZA.M/C указана длина области 5, превышающая объем памяти ОЗУ, оставшейся свободной после загрузки системы и задач первого типа. В этом случае нужно либо исключить из карты загрузки ненужные программы, например DVR09, DVR10, обслуживающие ММО, либо свести обл. 5 в BAZeMAC до 0.
Если при обращении к ВЗУ возникает ошибка, на системный терминал выводится сообщение:
ССТ ОШ ВЗУ ZZZZZ, где ZZZZZ - код ошибки.
При формировании телемеханических таблиц на ВЗУ типа VZ: могут возникать ошибки при записи числа. В этом случае выводится сообщение:
АД NNNNNN ЗП LLLLLL ЧТ ММММММ, где NNNNNN - адрес на VZ: в восьмеричном коде;
LLLLLL - записываемое число в двоичном коде;
ММММММ - читаемое число в двоичном коде.
Для исключения таких ошибок перед загрузкой ОС РВ следует провести тестирование плат VZ: (ПП-014) и PZ: (ПП-013) (последние следует тестировать до записи на них программных модулей).
В состав операционной системы входит супервизор программ, который выполняет обработку вызовов супервизора от других программ. Обработать вызов - это значит связать любую выполняющуюся программу с ядром операционной системы.
Когда происходит прерывание по 200-му вектору - это прерывание от СЦ, из ячейки 200/адрес выбирается адрес, в котором записан супервизор SPR. Этот адрес всегда 150008. Супервизор SPR запускает программу "Диспетчер функционального адреса (DFA)", которая предназначена для инициализации программ обработки и отображения телемеханической информации по получении посылки соответствующего функционального адреса из СЦ (т.е. от аппаратов КП).
Программа DFA закрывает все прерывания и запускает драйвер DVR08, обеспечивающий работу с СЦ для приема информации, поступившей от КК. Производится чтение информации из регистра данных СЦ (его адрес 175772). Считывание производится всей посылки в промежуточный буфер. Затем управление возвращается обратно DFA. Если задача ТS для обработки такого типа данных (телесигнализация) свободна, то ей передается управление (т.е. она вызывается) и DFA завершает работу.
Программа ТS выполняет следующие функции:
записывает значения телесигналов в текущую телемеханическую базу (размещенную в ОЗУ, ее начальный адрес записан в ячейке 470/адрес текущей телемеханической базы);
передает информацию для отображения на платах, установленных в КК, для отображения на щите и в технологических кадрах (в последнем случае вызывается программа ВС7Р);
выдает значения телесигналов на программный интерфейс IS;
подсчитывает суммарную продолжительность простоя оборудования на стороне КП;
подготавливает квитанцию о приеме телесигналов;
выдает значения телесигналов по запросам от других задач;
сравнивает телесигналы с BAZA.TAB. При наличии расхождений производит запись новых ТС BAZA.TAB.
Приложение 3
СОЗДАНИЕ НОВЫХ ФАЙЛОВ И КОРРЕКЦИЯ СУЩЕСТВУЮЩИХ В ОПЕРАЦИОННОЙ СИСТЕМЕ "ОС РВ ГРАНИТ"
Для создания новых файлов следует воспользоваться дискетой с операционной системой "ФОДОС", создать в этой системе файл, а затем перевести его в операционную систему "ОС РВ ГРАНИТ".
Загрузка ОС ФОДОС
Загрузить систему "ФОДОС" в инструментальную ЭВМ МС 12.01.02. Обычно для этой цели используется одна или две ЭВМ ПУ ТК "ГРАНИТ".
Порядок действий:
нажать и отпустить кнопку пульт/программа инструментальной ЭВМ, на экране консоли должна быть буква "С";
нажать на клавиатуре консоли букву "В" лат.; должен быть ответ на дисплее ">";
на клавиатуре консоли печатать: МХО (нуль) ВК при условии, что дискета с системой "ФОДОС" вставлена в дисковод 0 (левый накопитель). Предварительно НГМД должен быть включен, при этом на фасаде должны гореть четыре светодиода;
после обращения через интерфейс к НГМД (слышны щелчки в дисководе) на экране консоли сообщается о загрузке "ФОДОС" и запрашивается ДАТА;
тире тире
- следует ввести дату в виде: 07 - 02 - 97 ВК
число месяц год клавиша
на остальные запросы следует нажимать клавишу "ВК";
после появления на экране дисплея консоли точки "." система "ФОДОС" готова к работе;
клавиша "ТАЙМЕР" на плате управления ЭВМ (блок Р-25) должна быть отжата при работе с системой "ФОДОС".
Создание нового кадра или корректировка существующего
Порядок действий:
вызвать каталог дискеты с "ФОДОС". Для этого печатать:DIR ВК;
убедиться в том, что в каталоге есть редактор ТЕД;
убедиться, что в каталоге есть файл кадра, который подлежит корректировке;
если создается новый файл, посмотреть по каталогу что на дискете есть достаточно свободного места <FREE>?;
вызвать (загрузить) редактор ТЕД, для чего печатать:
R ٮ ТЕД ВК;
пробел
после появления на экране приглашения к работе в виде ">" нажать клавиши "УПР + С", на экране появится приглашение к экранному (тестовому) редактору;
работая на клавиатуре с русским текстом, создать кадр;
кадры могут быть:
М | 16. | MAC | - | наименования объектов подстанции (п/ст). Желательно присваивать номер (16) тот же, что у линейного узла в КК (номер КП); |
обязательная буква | номер | обязательное расширение | ||
ATS 16. |
| MAC | - | кадр с наименованиями для бегущей строки на экране диспетчерского дисплея. Создается отдельно для каждой п/ст; |
номер |
|
| ||
|
| FTU. MAC | - | кадр для телеуправления объектами. При включении новой п/ст этот файл дополняется, для чего требуется большой объем свободной области на дискете; |
|
| МО. MAC | - | нулевой кадр с наименованиями подстанций и соответствующих им номеров кадров; |
|
| BAZA. MAC | - | информационная база, в которой указаны сведения об объемах и другие для каждой п/ст; |
поскольку все виды кадров уже созданы, то рекомендуется перевести редактор в командный режим. Для этого повторно нажать клавиши "УПР + С" и получить на экране ">", т.е. приглашение к вводу команды;
вызвать с дискеты в ОЗУ созданный кадр:
R ٮ М16. MAC BK
пробел или
другой
номер,
16 – это
пример;
после загрузки вновь нажать клавиши "УПР + С", на экране появится вызванный кадр;
изменить его, т.е. допечатать новые названия, дополнить и т.п.;
записать новый кадр на дискету:
W ٮ M17. MAC BK
N новый
таким же образом действовать при редактировании других видов файлов.
Перевод кадра или файла из системы "ФОДОС" в систему "ОС РВ ГРАНИТ"
Загрузить систему "ОС РВ ГРАНИТ", для чего следует:
нажать клавишу "ТАЙМЕР" на пульте управления ЭВМ, в которую была загружена система "ФОДОС";
на клавиатуре консольного дисплея напечатать:
R __ Z ВК.
На экране появится С14536;
вытащить дискету "ФОДОС" и вставить дискету "ОС РВ ГРАНИТ" в тот же накопитель. Желательно, чтобы на этой дискете не было файла BAZA.M/C;
нажать на клавиатуре букву "Р" (лат.). На экране будет информация о загрузке файлов ОС РВ ГРАНИТ. Первым загружается операционная система SPR. В конце загрузки на экране появится точка ".";
для перевода файла из ОС ФОДОС в ОС РВ ГРАНИТ воспользоваться программой обслуживания файлов POF и ее функциями;
печатать RU POF ВК (в системе "ОС РВ ГРАНИТ" пробел вводится автоматически);
ответ ЭВМ на дисплее POF?
установить дискету "ФОДОС" в накопитель / (правый), убедившись в его исправности, и вызвать функцию FF:
FF ВК
ответ ЭВМ: параметры FF
печатать:
ДО:16.МАС = Д1:М1б. МАС ВК
ОС РВ ГРАНИТ ФОДОС
(в системе "ФОДОС" название кадра начинается с М16, а в системе "ОС РВ ГРАНИТ" с цифры 16)".
В системе "ОС РВ ГРАНИТ" накопитель называется для функций POF - ДО или Д1, а в системе "ФОДОС" - МХО или МХ1;
отказаться от функции FF нажатием клавиши "ПС".
В ответ ЭВМ выдаст: функция POF?
Для ухода в точку "." нажать клавиши "УПР + С", т.е. две клавиши.
Так же действовать и с другими видами кадров.
Создание файла FTS16.MIC из FТS16.МАС, т.е. рабочего файла для бегущей строки
Для создания файла FTS16.M/C из FTS16.MAC в системе "ОС РВ ГРАНИТ" на дискете должна быть программа REDT
─ редактор файлов имен:
печатать: RU REDT ВК
ответ ЭВМ: имя файла?
печатать: ДО: FTS16.MAC ВК
этот номер для примера везде указан
ответ:
1 ─ ТС
2 ─ ТИТ
3 ─ ТИИ
печатать: 1 ВК
Символьный файл FTS16.MAC считывается с диска с системой "ОС РБ ГРАНИТ", преобразовывается и записывается на СЗУ VZ как FTS16.M/C.
По окончании преобразования, если в исходном файле FTS16.MAC нет ошибок, на дисплей выводится сообщение:
ИМЯ ФАЙЛА?
Если ошибки имеют место, то сообщение:
ошибок ХХХХ
в строках ХХХХ, ХХХХ, ХХХХ
файл FTS16.М/С создается на VZ, если предварительно там такого файла нет. В противном случае его нужно уничтожить функцией РU программы POF;
после создания на VZ файла FTS16.M7C, пользуясь функцией CF копирования файлов программы POF, скопировать новый файл на ДО или Д1 в дискету ОС РВ ГРАНИТ:
ДО: FTS16.M/C = VZ:FTS16.M/C ВК
или Д1: (тогда в накопитель Д1 поставить дискету с ОС РВ ГРАНИТ).
Примечание. При создании символьного файла в системе "ФОДОС" FTS16.MAC руководствоваться примером.
Пример:
/Чирково ОД 11О кВ/ 12 ٮ О ٮ 15; Z, Р, 1
N КП пробел N груп- N ТС
пы, в ко- в группе
торой
находит-
ся ТС
Z - признак вывода бегущей строки со звуковым сигналом;.
Р - вывод на печать (номер канала печати берется из базы);
1 - номер диспетчерского дисплея, на который выводится строка (счет от 0 до 7).
В названии следует указать наименование подстанции.
Каждая вводимая строка должна иметь телемеханический адрес больший, чем предыдущая строка.
Приложение 4
ПОИСК ПРИЧИНЫ СБОЯ ПРОГРАММЫ
Для каждой задачи, загруженной в ОЗУ, программа "LOADR" формирует описатель задачи (ID); его адрес можно узнать с помощью "RS" - функции клавиатурного монитора. Пользуясь этой функцией, следует переписать, состояния всех задач, пока система выдает точку, с тем, чтобы ориентироваться в поиске причины выхода из точки.
RS имя задачи ВК
печатается состояние задачи, т.е. поиск в ОЗУ ID, сегмента указанной задачи, на экран дисплея выдается адрес ID сегмента, точка запуска задачи, тип задачи, приоритет и адрес стека.
Описатель задачи имеет следующий вид:
Восьмеричный код номера слова по порядку в описателе | Что слово означает | Кем заполняется (L - LOADR перемещающий загрузчик D - диспетчер задач) |
|
|
|
1-е | Это адрес описателя следующей задачи | D |
2-е | Имя задачи (первые 3 символа) | L |
3-е | Имя задачи (вторые 3 символа) | L |
4-е | Точка (адрес) запуска задачи | L |
5-е | Точка (адрес) приостанова задачи | L |
6-е | Тип задачи | L |
| Приоритет |
|
7-е | Слово состояния задачи | D |
8-е | Адрес вершины стека | D |
При работе системы задачи располагаются в оперативной памяти и на внешнем запоминающем устройстве.
Диспетчер задач обслуживает пять типов задач, которым соответственно отводится пять областей ОЗУ.
Адреса загрузки и длина областей ОЗУ для каждого типа задач находятся в системно распределенной области в следующих ячейках:
ТИП2: | 362 | ТИП. | В этой области могут находиться задачи, не относящиеся к другим типам |
| 364 | адрес загрузки | |
| 366 | длина области в байтах | |
ТИП3: | 370 | ТИП | В этой области загружаются сервисные системные задачи |
| 372 | адрес загрузки | |
| 374 | длина области в байтах | |
ТИП4: | 376 | ТИП | В этой области память резервируется за системой |
| 400 | адрес загрузки | |
| 402 | длина области в байтах | |
ТИП5 | 404 | ТИП | В этой области могут находиться задачи, не относящиеся к другим типам |
| 406 | адрес загрузки | |
| 410 | длина области в байтах |
Имея в виду вышеуказанные сведения о задачах (их адреса загрузки) после останова системы на каком-либо адресе (на консольном дисплее @ адрес), можно определить, во время выполнения какой именно задачи произошел останов. Далее следует обратиться к адресу, расположенному выше адреса останова на несколько команд, и, читая команды в машинных кодах, определить причину останова.
Например, было обращение к какому-либо регистру интерфейсной платы или ВЗУ, а в ответ не последовало ответа. Следовательно, нужно заниматься соответствующей интерфейсной картой и блоком, с которым она связана.
Алгоритм поиска причины неисправности при эксплуатации ТК "ГРАНИТ"

Продолжение приложения 4
Лист 2

Окончание приложения 4
Лист 3

Приложение 5
ПЕРЕЧЕНЬ ПРИБОРОВ И ОБОРУДОВАНИЯ, НЕОБХОДИМЫХ ДЛЯПРОВЕРКИ И ЭКСПЛУАТАЦИИ КОМПЛЕКСОВ ТЕЛЕМЕХАНИЧЕСКИХ УСТРОЙСТВ
Наименование прибора или оборудования | Тип | Основная погрешность измерения или класс точности | Необходимые пределы измерений | Обозначение стандарта, технических условий и других документов |
1. Осциллограф двухлучевой | С1-69 | ± 5% | 2-30В1 мс-10с | И22.044.008ТУ |
2. Вольтметр универсальный | В7-21 | 0,1 ± 0,03 | 0-5 мА | И22.710.004ТУ |
3. Прибор электроизмерительный комбинированный | Ц4352 | ± 1,5% | 0-300 В 0-3 А | ТУ 25-04.3303-77 |
4. Частотомер электронно-счетный | 43-33 | 0,1% | 50-1200 Гц | И22.721.028ТУ |
5. Источник питания постоянного тока | Б5-8 | ± 3% | 2А | Е70.323.415ТУ |
6. Магазин сопротивлений | МСР-60М | 0,02 | 2000 Ом | ГОСТ 23737-79 |
7. Секундомер | СОСпр-2б | - | 0-60 мин | ГОСТ 5072-79 |
8. Мегаомметр | Ф4101 | 2,5 | 500 В | ТУ 25-04.2467-80 |
9. Вольтметр | Э533 | ± 0,5% | 0-300 В | ТУ 25-04.3716-79 |
10. Автотрансформатор лабораторный регулировочный | ЛАТР-2М |
|
| ТУ 16-517.216-69 |
КОМПЛЕКТ ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ ТЕЛЕМЕХАНИКИ версия 1.5 Руководство оператора телемеханического комплекса
АННОТАЦИЯ
Настоящий документ предназначен для руководства операторов телемеханического комплекса (далее - комплекс) на базе Комплекта Программно-Аппаратных Средств ТелеМеханики версии 1.5 (далее - КОМПАС ТМ 1.5).
1. НАЗНАЧЕНИЕ ПРОГРАММ
Программа KOMPAS15 предназначена для управления телеме- ханическим комплексом на базе КОМПАС ТМ 1.5.
2. УСЛОВИЯ ВЫПОЛНЕНИЯ ПРОГРАММЫ
Для выполнения программы необходимо наличие УПУ, состоящего из IBM-совместимой ПЭВМ с адаптером магистрального канала (АМК), АБПУ и кабеля связи АМК - АБПУ. Минимальный набор программных средств представляет собой ОС MS-DOS и базовое программное обеспечение комплекса, включающее: рабочий модуль программы KOMPAS15.EXE, рабочий модуль программы подготовки документа PRNT.EXE, драйвер АМК AMK_SYS.COM, служебные файлы конфигурации.
3. ВЫПОЛНЕНИЕ ПРОГРАММЫ
3.1. Запуск программы
3.1.1. Создайте отдельный каталог на жестком диске и скопируйте в него рабочий модуль программы с именем KOMPAS15.EXE, рабочий модуль программы подготовки документа PRNT.EXE и служебные файлы. Загрузка драйвера осуществляется либо через autoexec.bat , либо непосредственно перез запуском программы.
3.1.2. Наберите командную строку и нажмите клавишу <Enter>. Командная строка запуска программы должна содержать имя рабочего модуля KOMPAS15.EXE и может содержать ключи:
/R - для организации первичного сбора телеинформации с УКП при запуске программы (производится запрос оперативной телеинформации по всем УКП сигналов ТС, ТИТ и ТИИ);
/U - для возможности выбора объектов на графической мнемосхеме с помощью клавиатуры;
/P - для задания команд ТУ без запроса пароля оператора. В этом сеансе всем инициированным командам ТУ при регистрации присваивается имя исполнителя, идентифицированное системой при входе в программу;
/Cnn - для задания цвета указателя при работе на графической мнемосхеме с помощью клавиатуры (от 0 до 15);
/Ann - адрес ПУ ( от 1 до 30).
Пример командной строки для запуска программы:
>KOMPAS15.EXE /P<Enter>
3.1.3. После старта программы выводится сообщение "Выполняется загрузка данных...". После окончания загрузки данных выводится сообщение "Загрузка данных завершена". Возможны также следующие предупредительные сообщения "Не установлен драйвер манипулятора "мышь" - управление производится с клавиатуры и "Не найден файл указаний по документированию" - содержание этого служебного файла определяет ведение режимных журналов.
Нажать клавишу F7 ("Пароль") на клавиатуре. Программа выводит расширенную строку подсказки.
3.1.4. Нажать клавишу F4 ("ВВОД ПАРОЛЯ") на клавиатуре.
3.1.5. В ответ на приглашение системы ввести личный пароль. Вводимый пароль не отображается на экране. При идентификации корректного пароля программа не выдает предупредительных сообщений и готова к работе. При неверно набранном пароле программа выдает предупредительное сообщение. Введенный рабочий пароль, принятый программой, становится текущим.
3.1.6. Нажать клавишу ESC ("Возврат") на клавиатуре. Программа изменит строку подсказки.
3.1.7. Нажать комбинацию клавиш "SHIFT-F9". При этом присходит проверка связи ПЭВМ с АБПУ и выдается сообщение "Проверка готовности АМК...". Обнаруженная ошибка оборудования сопровождается выдачей одного из следующих сообщений и выходу в DOS: "Не установлен драйвер АМК"; "Ошибка при контрольном обмене с АМК".
3.1.8. При положительном результате проверки программа выдает сообщение "Загрузить конфигурацию в ПУ (Y/N) ?".При нажатии клавиши "Y" происходит загрузка конфигурации. Ошибка при загрузке вызовет выход в ДОС.
3.1.9. При положительном результате загрузки программа переходит в режим отображения общей мнемосхемы ( если она установлена в системе ), иначе программа выводит на экран основное окно направлений и начинает обслуживание телекомплекса по установленной конфигурации.
3.1.10. Отображение информации программой предусматривается в двух режимах: табличном и графическом. Переход из одного режима в другой осуществляется по клавише F5 при наличии подсказки в нижней строке экрана. Наличие мнемосхем объектов оговаривается при установке телекомплекса и отмечено символом ">" в списке УКП при работе в графическом режиме. Если программа не обнаруживает мнемосхемы на конкретный объект (УКП) при переходе из табличного в графический режим, она выводит сообщение "Отсутствует мнемосхема или файл описания".
Переход в общую мнемосхему из любого окна - по клавише F6.
Оператор имеет возможность в процессе работы в табличном режиме оперативно изменять параметры конфигурации комплекса, в числе которых: периоды циклической активизации телекоманд, уровень их приоритета, периоды регистрации телеинформации по группам в дисковых диспетчерских журналах, уставки допускового контроля ТИТ, время повторного обращения к неответившему УКП; останавливать или активизировать обслуживание направления, УКП, функции.
3.1.11. При пересмене:
а) оператор, сдающий дежурство, должен:
- выйти в основное окно нажатием клавиши F10 ("ВЫХОД"),
- войти в режим изменения пароля нажатием клавиши F7 ("ПАРОЛЬ"),
- сбросить свой (текущий) пароль нажатием клавиши F3 ("СБРОС ПАРОЛЯ"),
б) оператор, принимающий дежурство, должен установить свой пароль текущим после нажатия клавиши F4 ("ВВОД ПАРОЛЯ") и вернуться в рабочий режим по "Shift-F9".
3.2. Телесигнализация и телеизмерения в табличном режиме
3.2.1. Путь доступа к информации о группе сигналов:
номер_направления->номер_УКП->телефункция->группа_сигналов.
Для получения информации о состоянии конкретной группы сигналов произведите выбор стрелками или "мышью" нужного объекта и сквитируйте его клавишей Enter клавиатуры или левой клавишей "мыши" соответственно. Таким образом производите последовательно выбор для отображения состояния группы сигналов в окнах:
"Направление",
" N | Адрес УКП | Наименование УКП |Тип УКП|Пер.АПУС",
"Функции".
Отображаемая на экране телеинформация оперативно обновляется в темпе ее получения, если события не носят аварийный характер.
3.2.2. В случае аварийных ситуаций: изменения состояния ТС, выход значений ТИТ за уставки допускового контроля сообщения немедленно отображаются на экран в специальных окнах.
Аварийная телесигнализация представляется списком в красном окне в нижней части экрана. В красном окне аварийных ТС указаны номер направления, адрес и наименование УКП, номер, наименование и значение канала ТС. В правой верхней части красного окна индицируются номера направлений, по которым зарегистрированы изменения ТС и количество несквитированных оператором аварийных ТС на текущий момент времени. При просмотре списка аварийных ТС по направлениям используйте клавиши "PgUp", "PgDn".
Аналогично представляется информация о выходе значений ТИТ за пределы уставок допускового контроля. Красное окно аварийных значений ТИТ открывается в верхней части экрана.
Красные окна сохраняются на экране до тех пор, пока оператор не выполнит квитирование всех сообщений. Заложено три уровня квитирования:
1) по клавише "F1" - квитирование всех сообщений;
2) по клавише "F3" - квитирование всех сообщений по текущему направлению;
3) по клавише "F2" - квитирование сообщений по текущему УКП;
4) по клавише "Пробел" - квитирование отдельного сообщения.
Отображение красных окон сопровождается звуковым сигналом, который периодически выдается в течении всего времени нахождения аварийного окна на экране. Нажатием клавиш "ALT-S" можно производить отключение/включение звуковой сигнализации. Нажатием клавиш "ALT-Z" можно квитировать звуковую сигнализацию до следующей аварийной ситуации.
Перехода из красного окна ТС в красное окно ТИТ и обратно при их одновременном отображении на экране производите по клавише "Tab". При этом соответственно перемещается курсор квитирования.
3.2.3. Для включения/отключения допускового контроля значений ТИТ (только для УКПМ) выполните в окне функции "Уставки" следующие операции:
1) выберите при помощи стрелок клавиатуры (с фиксацией клавишей ENTER) или "мыши" (с фиксацией положения левой клавишей) в столбце "Контроль" позицию, соответствующую нужному каналу ТИТ. Значение "1" соответствует включению,а "0" - отключению допускового контроля по данному каналу ТИТ;
2) выберите при помощи стрелок клавиатуры (с фиксацией клавишей ENTER) или "мыши" (с фиксацией положения левой клавишей) позиции уставок. Активизированные уставки изменяют цвет фона.
3) Введите при необходимости новые значения уставок. Для этого следует набрать на клавиатуре комбинацию "Shift-F1", указать при помощи стрелок клавиатуры или "мыши" уставку и ввести новое значение. После ввода значения и потверждения оператором необходимости изменения программа отправит новые значения уставок в соответствующий УКПМ. На экране появится предупредительное сообщение "Ожидание квитанции ...". После приема квитанции от УКП о смене блока уставок сообщение удаляется, а в дисковом диспетчерском журнале сохраняется информация: номер и наименования направления, адрес и наименование УКП, номер и наименование ТИТ, дата и время регистрации события, старое и новое значения уставок и тип уставки;
4) после выдачи УКПМ блока уставок программа осуществляет периодический (с интервалом 1 час при отсутствии дополнительной информации в служебном файле) контроль измененных оператором значений уставок УКПМ. При обнаружении несовпадения принятого от УКПМ блока уставок с хранящимся в дисковом журнале программа переходит в режим регенерации уставок с выдачей символа " R " в правом верхнем углу экрана. Производится попытка автоматического восстановления значений блока уставок. Результат заносится в дисковый журнал и выводится предупредительное сообщение оператору в черном окне "Восстановление уставок" с указанием номера направления, адреса и наименования УКП, номера канала ТИТ.
3.2.4.Для остановки обслуживания направления, отдельного УКП или функции необходимо с помощью стрелок клавиатуры или с помощью "мыши" (с фиксацией левой клавишей) выбрать нужную строку в соответствующем окне и нажать клавишу F7. Приостановленный объект выделяется черным цветом. Для активизации направления, УКП либо функции после аналогичного выбора нажмите клавишу F8.
3.3. Телеуправление в табличном режиме
3.3.1. Для выдачи команды ТУ необходимо:
а) при помощи стрелок клавиатуры (с фиксацией клавишей Enter клавиатуры) или "мыши" (с фиксацией левой клавишей) выбрать нужный объект ТУ по пути:
номер_направления->адрес_УКП->функция ТУ->объект ТУ.
б) нажать клавишу Enter. Программа откроет командное окно с двумя командами: "Включить" и "Отключить". Назначение информации в столбцах командного окна следующее:
в графе "Посылка" - синим прямоугольником потверждается факт отправки УПУ команды ТУ в адрес УКП,
в графе "Квитанция" - зеленым прямоугольником потверждается получение квитанции от УКП на исполнение этой команды ТУ,
в графе "Подтверж.ТС" - розовым прямоугольником отображается состояние подтверждающего ТС (объекта тетеуправления).
Положение прямоугольника в последнем столбце зависит от заданного для него значения, соответствующего состоянию объекта "Включено". Например, если в окне ТУ состояние в столбце "Акт." подтверждающего ТС задано значением "0", то при открытии командного окна и фактическом значении данного ТС равном "1" прямоугольник в столбце "Подтверж.ТС" командного окна будет находиться в строке "Отключить" и перейдет в строку "Включить" только при получении от данного УКП сигнала об изменении состояния данного ТС в "0".
В окне ТУ в столбцах "ВКЛ" и "ОТКЛ" фиксируется результат выполнения последней команды ТУ. Если в любом из них находится полный прямоугольник розового цвета, это соответствует тому, что состояние объекта соответствует последней выданной команде. Если же в одной граф, "ВКЛ" или "ОТКЛ", строки данной команды выведено два разноцветных квадрата, а в противоположном - один, это соответствует тому, что на отправленную команду ТУ не получен сигнал потверждения ТС.
в) при помощи стрелок клавиатуры или "мыши" выбрать нужную команду ТУ;
г) нажать клавишу Enter или левую клавишу "мыши". Программа откроет окно ввода пароля оператора.
ВНИМАНИЕ: Если старт системы производился с ключом /P, то пароль не запрашивается, а используется текущий и команда инициируется сразу после нажатия клавиши Enter или левой клавиши "мыши";
д) ввести личный пароль оператора. После ввода пароля осуществляется сравнение его с текущим зарегистрированным и при их совпадении команда ТУ будет отправлена. При несовпадении паролей выдается сообщение "Неверный пароль". При получении с командой ТУ пароля, отсутствующего в списке паролей, программа выдает на экран сообщение "Данный пароль не зарегистрирован" и команда ТУ не исполняется. Индикация команды ТУ осуществляется синим прямоугольником в командном окне. Получение квитанции от УКП об исполнении команды ТУ отображается зеленым прямоугольником. Состояние подтверждающего ТС отображается розовым прямоугольником в командном окне ТУ. По паролю в дисковом журнале регистрации команд ТУ фиксируется фамилия оператора, выполнившего команду ТУ.
Неполучение после переспросов квитанции от УКП на команду ТУ индицируется отсутствием зеленой метки, а получение с ошибкой формата - мигающей меткой в графе "Квитанция" командного окна ТУ.
3.4. Печать отчетов
3.4.1. В процессе работы программа сохраняет текущие данные в дисковых журналах. Регистрация производится с привязкой по времени на УПУ:
а) всех выполненных команд ТУ;
б) всех изменений состояний ТС и выходов за пределы уставок значений ТИТ;
в) значений по каналам ТИТ и ТИИ с периодом регистрации (ретроспектива событий);
г) нарушений/восстановления связи с УКП и КЩ;
д) изменений значений уставок каналов ТИТ УКП;
е) всех действий оператора по оперативному изменению параметров системы;
ж) ошибок формирования журналов регистрации и ошибок ПУ.
3.4.2. Для получения требуемого документа на экране , на принтере или в файле следует:
1) перейти в табличный режим отображения информации;
2) набрать на клавиатуре комбинацию клавиш "ALT - W";
3) по приглашению системы ввести номер формы отчета. "Шапка" отчета будет выведена на экран. Кроме этого будут выведены все фильтры формы, установленные при конфигурировании;
4) оператор имеет возможность редактирования полей: "шаг" и "корреляция",а также фильтров по всем столбцам. Выбранное клавишей Таb поле выделяется черным цветом. Для редактирования фильтра столбца следует набрать на клавиатуре комбинацию "Shift - F1", выбрать стрелками нужный столбец, ввести новое значение и нажать клавишу Enter. Для сброса фильтра по выбранному столбцу достаточно нажать клавишу Enter без ввода значения. В ответ на приглашение системы подтвердить ввод значения выбором "ДА" и клавишей Enter.
При формировании отчета программа пропускает только те записи, которые удовлетворяют условиям фильтрации. Например, для столбца "Направление" при заданном фильтре ">2" в отчет попадут только те события, которые относятся к 3-ему и 4-ому направлениям.
Особым образом производится фильтрация по полям(столбцам) даты "DATE" и времени "TIME". Фильтры этих полей предназначены для выборки записей из базы данных по временным параметрам. Помимо сравнения по указанным фильтрам, для полей даты и времени имеет значение также признак их взаимосвязи, задаваемый в строке фильтров "корреляция" и имеющий значения есть/нет. Принцип фильтрации выводимых данных по дате/времени приведен в таблице.
Таблица
+-------------------------------------------------------------------+ | | Запись | Запись | | |Корреляция| фильтра| фильтра | Фильтрация | | D и Т | даты D |времени Т| | |----------+--------+---------+-------------------------------------| | есть | нет | нет | отсутствует | |----------+--------+---------+-------------------------------------| | есть | *D1) | нет | отсутствует | |----------+--------+---------+-------------------------------------| | есть | =D | =T | производится вывод одного значения | | | | | с временем равным или минимально | | | | | предшествующим ему в пределах STEP | | | | | Интервал: D(T...T-STEP) | |----------+--------+---------+-------------------------------------| | есть | нет | =T | то же, значение даты - дата послед- | | | | | ней записи | | | | | Интервал: ENDDAY(T...T-STEP) | +-------------------------------------------------------------------+
____________________
1) "*" - любой из символов из ряда ">", "<" или "=".
Продолжение таблицы +-------------------------------------------------------------------+ | | Запись | Запись | | |Корреляция| фильтра| фильтра | Фильтрация | | D и Т | даты D |времени Т| | |----------+--------+---------+-------------------------------------| | есть | нет | <Т | производится вывод всех значений, | | | | | предшествующих указанному времени | | | | | на дату последней записи с учетом | | | | | STEP | | | | | Интервал: начало журнала...ENDDAY(T)| |----------+--------+---------+-------------------------------------| | есть | нет | >Т | производится вывод всех значений, | | | | | последующих за указанным времени | | | | | на дату последней записи с учетом | | | | | STEP | | | | | Интервал: ENDDAY(T)...конец журнала | |----------+--------+---------+-------------------------------------| | есть | <D | *Т | производится вывод всех значений, | | | | | предшествующих указанному времени | | | | | Интервал: начало журнала(интервал T)| | | | | ...D(интервал T) | |----------+--------+---------+-------------------------------------| | есть | >D | *Т | производится вывод всех значений, | | | | | последующих за указанным временем | | | | | Интервал: D(интервал T)...конец | | | | | ...журнала(интервал T) | |----------+--------+---------+-------------------------------------| | нет | нет | нет | отсутствует | |----------+--------+---------+-------------------------------------| | нет | *D | =Т | производится вывод одного значения | | | | | по всем указанным датам со временем,| | | | | равным или минимально предшествующим| | | | | в пределах STEP указанному | | | | | Интервал Т: Т-STEP...T | | | | | Интервал Т: 00:00:00...Т | |----------+--------+---------+-------------------------------------| | нет | *D | <Т | производится вывод всех значений | | | | | по всем указанным датам со временем,| | | | | предшествующему указанному с учетом | | | | | STEP | | | | | Интервал Т: 00:00:00...Т | |----------+--------+---------+-------------------------------------| | нет | *D | >Т | производится вывод всех значений | | | | | по всем датам, последующим за ука- | | | | | занным временем с учетом STEP до | | | | | 24 часов | | | | | Интервал Т: Т...23:59:59 | |----------+--------+---------+-------------------------------------| | нет | *D | нет | производится вывод всех значений | | | | | по всем указанным датам | | | | | Интервал Т: 00:00:00...23:59:59 | +-------------------------------------------------------------------+
Продолжение таблицы +-------------------------------------------------------------------+ | | Запись | Запись | | |Корреляция| фильтра| фильтра | Фильтрация | | D и Т | даты D |времени Т| | |----------+--------+---------+-------------------------------------| | нет | =D | *Т | производится, вывод всех значений | | | | | в соответствии с отношением времени | | | | | по указанной дате | | | | | Интервал: D(интервал T) | |----------+--------+---------+-------------------------------------| | нет | <D | *Т | производится, вывод всех значений | | | | | в соответствии с отношением времени | | | | | по датам, предшествующим указанной | | | | | Интервал: начало журнала(интервал T)| | | | | ...D(интервал T) | |----------+--------+---------+-------------------------------------| | нет | >D | *Т | производится, вывод одного значения | | | | | в соответствии с отношением времени | | | | | по датам, последующим указанной | | | | | Интервал: D(интервал T)... | | | | | ...конец журнала(интервал T) | +-------------------------------------------------------------------+
В любом случае, если значений не обнаружено в указанном временном интервале фильтра, выводится пустая запись. Заносить фильтр по дате следует в формате: ЧЧ-ММ-ГГГГ (число-месяц-год), фильтр по времени - в формате: ЧЧ:ММ:СС (часы:минуты:секунды);
Контроль введенных оператором фильтров на достоверность не производится !
5) если редактирование окончено или оно не требовалось, то после вывода шаблона следует нажать на клавиатуре F2 ("Вывод документа");
6) в появившемся окне следует выбрать стрелками или "мышью" устройство вывода: "экран", "принтер",файл документа или файл в формате DBF (имена этих файлов устанавливаются при конфигурировании и содержаться в служебных файлах) и нажать клавишу "Enter" или левую клавишу "мыши".
Программа в случае успешного окончания подготовки начнет вывод документа на указанное устройство. Если же будет обнаружена какая-либо некорректность, программа выведет сообщение "Ошибка при подготовке документа" и код обнаруженной ошибки.
При выводе отчета на экран: если размер документа превышает размер экрана, то для просмотра документа на экране следует использовать клавиши "Влево", "Вправо", "Вверх", "Вниз", "PgUp", "PgDn".
При выводе отчета на печать: если размер документа превышает размер одной страницы текста и печать производится на отдельных листах, программа после вывода очередной страницы ожидает не более 60 с для смены листа печати. При истечении времени ожидания программа выходит из режима вывода документа и готова к приему команды на формирование следующего документа. Если при печати одного документа производится попытка формирования другого документа, программа выводит сообщение об ошибке действий оператора, печать первого документа продолжается.
3.5. Телесигнализация, телеизмерения и телеуправление в графическом режиме
3.5.1. При отображении общей мнемосхемы на экран выводится обобщенная информация по всем обслуживаемым УКП. Каждому условному графическому обозначению (УГО) УКП соответствуют индикаторы аварийных изменений ТС, аварийного выхода значений ТИТ за уставки допускового контроля. Первые два события сопровождаются мерцанием соответствующих индикаторов УГО и звуковым сигналом ПЭВМ. Индикатор УГО неответившего или приостановленного УКП подсвечивается заданным цветом. Выбор УКП осуществляется стрелками клавиатуры и фиксируется клавишей Enter, либо, после выбора "мышью", фиксируется правой или левой клавишей "мыши". Левая клавиша "мыши" вызовет вывод мнемосхемы выбранного УКП, правая - графические таблиц значений ТИТ и ТИИ выбранного УКП.
3.5.2. В графическом режиме информация по УКП отображается в виде функциональной мнемосхемы и таблиц ТИТ, ТИИ. Переход между ними осуществляется по клавише F4. Выход в табличный режим-по клавише F5.
3.5.3. Для перехода от одного УКП к другому в пределах одного направления следует вызвать меню УКП: нажать клавишу F7 или перевести указатель "мыши" на подсказку "F7 Окно КП" и нажать левую клавишу. Прокрутка свитка меню производится стрелками "Вверх" и "Вниз" клавиатуры. Наименование текущего УКП выделено в списке инверсным цветом. Выбором при помощи "мыши" или вводом непосредственно на клавиатуре порядкового номера в списке УКП и клавиши Enter производится переход к отображению выбранного УКП. При попытке отображения мнемосхемы, не установленной в системе, производится отображение графических таблиц ТИТ, ТИИ. УКП, на которые в системе установлены мнемосхемы, отмечаются в списке УКП графического режима символом ">".
Для перехода к УКП другого направления следует вызвать меню направлений: нажать клавишу F8 или перевести указатель "мыши" на подсказку "F8 Окно напр" и нажать левую клавишу. Наименование текущего направления выделено в списке инверсным цветом. При помощи "мыши" или набрав непосредственно на клавиатуре порядковый номер направления можно получить меню УКП данного направления. При помощи "мыши" или набрав непосредственно на клавиатуре порядковый номер в списке УКП и Enter производится переход к отображению выбранного УКП.
3.5.4. Если программой зарегистрированы изменения состояний ТС по УКП, не отображаемым в данный момент на экране, информация об этом выводится в левой верхней части экрана и сопровождается звуковой сигнализацией. Информация представляется в виде синего окна с ключевым словом ТС, на котором красным цветом выделены номера направлений, по которым зарегистрированы изменения состояний ТС.
Для перехода на отображение УКП, в котором зарегистрированы изменения состояний ТС, следует навести указатель "мыши" на номер активного направления и нажать левую клавишу "мыши", либо набрать на клавиатуре комбинацию клавиш "Alt-1"..."Alt-4" в соответствмм с номером выбранного направления. На экран будет выведен список УКП выбранного направления, имеющих изменения состояний ТС. При помощи "мыши" или набрав непосредственно на клавиатуре порядковый номер в списке УКП и Enter возможен переход к отображению выбранного УКП.
Если программой зарегистрированы выходы значений ТИТ за уставки допускового контроля по УКП, не отображаемым в данный момент на экране, информация об этом выводится в правой верхней части экрана и сопровождается звуковой сигнализацией. Информация представляется в виде синего окна с ключевым словом ТИ, на котором красным цветом выделены номера направлений, по которым зарегистрированы выходы значений ТИТ за уставки допускового контроля.
Для перехода на мнемосхему УКП, в котором зарегистрированы выходы значений ТИТ за уставки допускового контроля, следует навести указатель "мыши" на номер активного направления и нажать левую клавишу "мыши", либо набрать на клавиатуре комбинацию клавиш "Alt-5"..."Alt-8" в соответствии с номером выбранного направления. На экран будет выведен список УКП выбранного направления, имеющих выходы значений ТИТ за уставки допускового контроля. При помощи "мыши" или набрав непосредственно на клавиатуре порядковый номер в списке УКП и Enter возможен переход к отображению мнемосхемы выбранного УКП. Если выбирается УКП с номером, состоящим из двух цифр, переход на выбранное УКП осуществляется после ввода второй цифры без ожидания нажатия клавиши Enter.
Для инициирования команд ОТ и ТСК в режиме отображения мнемосхемы УКП необходимо набрать на клавиатуре комбинации "Alt-O" и "Alt-T" соответственно.
3.5.5. Квитирование сигнализации производится:
по отдельному ТС или ТИТ- переводом указателя "мыши" (либо стрелки-указателя с помощью стрелок клавиатуры) на блинкирующее УГО и нажатием левой клавиши "мыши"( либо нажатием клавиши Enter);
по всем изменениям текущего УКП - нажатием клавиши F2 или переводом указателя "мыши" на подсказку "F2 тек.КП" и нажатием левой клавиши "мыши";
по всем изменениям УКП текущего направления - нажатием клавиши F3 или переводом указателя "мыши" на подсказку "F3 тек.напр" и нажатием левой клавиши "мыши";
по всем изменениям УКП всех направлений - нажатием клавиши F1 или переводом указателя "мыши" на подсказку "F1 всех изм." и нажатием левой клавиши "мыши";
квитирование звуковой сигнализации до следующего аварийного события производится набором клавиш "Alt-Z".
3.5.6. Сигнализация о нарушениях, восстановлении связи с УКП и регистрации несанкционированных оператором изменений значений уставок УКП (например, при перерыве электроснабжения УКП) производится в верхней части экрана символами "Н", "В" и "У", соответственно, черного цвета. При выборе меток "Н", "В" и "У" при помощи "мыши", либо набором на клавиатуре комбинации клавиш "Alt-H", "Alt-B", "Alt-U" на экран представляется для квитирования расширенная информация о соответствующем событии. Квитирование производится клавишей F1.
3.5.7. На мнемосхеме УКП может быть представлена вся необходимая информация.
Индикация состояний ТС производится заданными при конфигурировании цветами непосредственно на УГО контролируемых объектов. Изменение состояния ТС сопровождается блинкированием (миганием) поля индикации и звуковой сигнализацией.
Отображение значений ТИТ производится в установленных при конфигурировании позициях. Выход значений ТИТ за уставки допускового контроля сопровождается блинкированием (миганием) поля индикации УГО объекта, красным полем "ТИТ" в правом нижнем углу экрана и звуковой сигнализацией.
Нарушение связи с данным УКП или остановка обслуживания его индицируется красным окном в левом верхнем углу экрана с символом "*". Остановке обслуживания соответствует белый цвет символа, нарушению связи - черный.
Индикация переключения состояния нетелемеханизированного объекта производится выбором его УГО с помощь стрелок клавиатуры и фиксацией клавишей Enter ,либо при помощи "мыши" с фиксацией положения левой клавишей.
3.5.8. Телеуправление производится следующим порядком:
а) выберите УГО объекта телеуправления при помощи стрелок клавиатуры или указателя "мыши". Если УГО блинкирует по изменению состояния ТС - сквитировать его нажатием клавиши Enter, либо левой клавишей "мыши";
б) нажать клавишу Enter или левую клавишу "мыши". В нижней части экрана выводится синее окно с двумя полями для выбора: "ВКЛ" и "ОТКЛ". Подчеркнутое поле отражает последнюю выполненную команду по данному объекту;
в) при помощи стрелок клавиатуры или "мыши" навести указатель на нужное поле и нажать Enter или левую клавишу "мыши". Программа выводит розовое окно приглашения для ввода пароля оператора.
ВНИМАНИЕ: Если старт системы производился с ключом /P, то пароль не запрашивается, а используется текущий и команда инициируется сразу после нажатия клавиши Enter или левой клавиши "мыши";
г) по приглашению системы ввести на клавиатуре личный пароль оператора и нажать клавишу Enter. В поле УГО объекта телеуправления отдельными цветами сигнализируются: выбор объекта ТУ, факт отправки УКП команды ТУ и получение квитанции от УКП по исполнению команды;
д) для сброса цвета результата выполнения команды ТУ и перехода на контроль состояния подтверждающего ТС при его неизменении (в противном случае - переход автоматически) нужно выбрать УГО контролируемого объекта при помощи "мыши" (или стрелками клавиатуры) и нажать правую клавишу "мыши" (или комбинацию клавиш "Alt-R").
3.5.9. В графических таблицах ТИТ, ТИИ отображены значения ТИТ и ТИИ, приведенные к реальным измеряемым значениям путем умножения на индивидуальные нормирующие коэффициенты ( КОЭФФИЦИЕНТ_ПЕРЕСЧЕТА - указаны в окнах ТИТ и ТИИ табличного режима ). Значения ТИТ и ТИИ отображаются в таблицах в темпе получения информации от УКП.
Выход значений ТИТ за пределы допускового контроля индицируется в таблицах подсвечиванием значения ТИТ красным цветом. Изменение ТС отображается в виде красного поля "ТС". Значения ТИТ, ТИИ неответивших УКП отмечаются символом "*". Приостановленность функций запроса ТИТ, ТИИ индицируется черным цветом заголовков таблиц ТИТ, ТИИ.
4. СООБЩЕНИЯ ОПЕРАТОРУ
4.1. При неполучении квитанции от УКП или КЩ оператору выдается сообщение в черном окне, если на экране в текущий момент не отображается хотя бы одно из красных окон. Если красное окно активно, программа выведет мерцающий символ "H" в левом верхнем углу экрана и выдаст черное окно после квитирования оператором красных окон. В черном окне выводится: для УКП - номер направления, наименование и адрес УКП, адрес неотработавшей функции и время автоматического повторного установления сеанса связи (АПУС) с УКП , или номер для КЩ. Черное окно должно обязательно квитироваться оператором клавишей F1. Эта же информация с временем регистрации события заносится в дисковый диспетчерский журнал. Адреса неответивших УКП хранятся системой в памяти ПЭВМ, а номера УКП и все последние принятые от них значения телеинформации отмечаются при отображении символом "*" в соответствующих окнах.
4.2. При успешной попытке связи с неответившим УКП или КЩ через время АПУС или при контрольном опросе его оператором на экран выдается сообщение в зеленом окне, если на экране в текущий момент не отображается хотя бы одно из красных или черных окон. Если красное или черное окно активно, программа выдаст зеленое окно после квитирования оператором красных и черных окон. В зеленом окне выводится: для УКП - номер направления, наименование и адрес УКП, адрес успешно выполненной функции и время автоматического повторного установления сеанса связи с УКП , или номер для КЩ. Эта же информация с временем регистрации события заносится в дисковый диспетчерский журнал. Зеленое окно удаляется с экрана при нажатии оператором клавиши F1 или при регистрации программой аварийного события.
4.3. В процессе работы комплекса производится диагностирование оборудования УПУ телекомплекса и при обнаружении ошибок в журнал выводится сообщение "Направление N выведено из опроса(ошибка АБПУ-XX)" с указанием кода ошибки.
4.4. При обнаружении программой ошибок конфигурации телекомплекса в журнал выводится сообщение с указанием номера направления, адресов УКП и описанием обнаруженной ошибки:
УПУ принята квитанция от УКП, адрес которого не зарегистрирован в конфигурации телекомплекса;
УПУ принята квитанция от УКП неустановленного направления в конфигурации телекомплекса;
УПУ принята квитанция от УКП, адрес которого не соответствует адресу УКП в инициированной функции (нарушение протокола обмена по каналу ТЧ).
4.5. При обнаружении программой ошибок в работе АМК или ПУ оператору выдается сообщение с описанием ошибки и программа выходит в ДОС.
Возможные вида ошибок:
Ошибка при приеме информации от АМК(XX);
От ПУ нет квитанции или АМК принимает с ошибкой;
У ПУ стабильная ошибка приема;
Адрес ПУ вопроса не равен адресу ПУ ответа;
Неопознанная информация от АМК (XXX);
Логическая ошибка последней команды ПЭВМ (X).
4.6. В процессе работы диагностируется оборудование обслуживаемых УПУ. В случае обнаружения ошибок УКП в журнал выводится сообщение .
Сообщения об ошибках УКПМ-2:
1) "Смещение нуля АЦП не в допуске";
2) "Смещение эталона АЦП не в допуске";
3) "Нет предварительного сброса при снятии байтов ТС";
4) "Некорректная установка номера группы при снятии ТС".
Сообщения об ошибках УП-КП.М:
1) "Непрерывная сигнализация по n-ой группе ТС";
2) "Обнаружена неисправность УП-КП.М при работе с ТС".
|
Руководство по эксплуатации УПИА. 426489. 093РЭ |
![]()
![]()
![]() ОКП 42 3295
ОКП 42 3295
СОДЕРЖАНИЕ
ВВЕДЕНИЕ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1 Описание и работа изделия. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1. 1 Назначение. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1. 2 Технические характеристики. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1. 3 Характеристики каналов. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1. 4 Работа устройства. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1. 5 Состав изделия. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1. 6 Маркировка и пломбирование. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1. 7 Упаковка. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2 Использование по назначению. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2. 1 Меры безопасности. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2. 2 Подготовка устройства к работе. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2. 3 Проверка функционирования устройства. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2. 4 Монтаж устройства. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2. 5 Возможные неисправности и способы их устранения. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3 Техническое обслуживание. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3. 1 Обслуживание. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3. 2 Консервация. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4 ХРАНЕНИе и транспортирование. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4. 1 Хранение. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4. 2 Транспортирование. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Приложение A. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Таблица внутренних соединений устройства. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
В связи с постоянной работой по совершенствованию в конструкцию изделия могут быть внесены несущественные изменения, не отраженные в настоящем издании, но не ухудшающие работу изделия.
ВВЕДЕНИЕ
Настоящий документ предназначен для ознакомления с конструкцией и принципом работы устройства телемеханики KP2011ER (далее – устройство), устанавливаемого на телемеханическом контролируемом пункте.
Описание и работа изделия
Назначение
Устройства устанавливается на телемеханическом контролируемом пункте (КП) и предназначены для выполнения функций по сбору информации о состояниях и значениях параметров объектов контроля и передачи этой информации на пункт управления (ПУ). Устройства созданы методом проектной компоновки из изделий номенклатуры КОМПАС ТМ 2. 0.Исполнения устройств различаются по информационной емкости по основным функциям, что определяется переменным составом устройства.
Устройство обозначается комбинацией букв и цифр.
Обозначение устройства включает обозначение серии устройства, идентификационный код (определяет информационную ёмкость, число и типы стыков связи с внешними устройствами, наличие и продолжительность резервирования электропитания) и код климатического исполнения.
Структура обозначения устройства приведена на рисунке 1.

Рисунок 1 – Структура обозначения устройства
Технические характеристики
Информационная емкость устройства по функциям:- 64 канала телеизмерения текущих значений контролируемых параметров (ТИТ);
- 128 каналов телесигнализации состояний контролируемых объектов (ТС).
Таблица 1
Время t | Пусковой ток i, А |
50 мкс ? t ? 500 мс | i ? 10 |
500 мс ? t ? 2 с | i ? 0,2 |
t ? 2 с | i ? 0,17 |
5 МОм при 500 В – при температуре окружающего воздуха плюс 70 °С и относительной влажности от 30 до 80 %;
1 МОм при 500 В – при температуре окружающего воздуха (плюс 35±5) °С и относительной влажности (95±3) %. Устройство устойчиво и прочно к климатическим воздействиям согласно таблице 2.
Таблица 2
Температура воздуха | Относительная влажность, % | Атмосферное давление, кПа | |
Диапазон, °С | Максимальная скорость изменения, °С/ч | ||
От -40 до +70 | 20 | От 5 до 95 без конденсации | От 84 до 108 |
Характеристики каналов
Характеристики каналов ТИТ устройстваРабочий диапазон входных сигналов ТИТ – от минус 5 до плюс 5 мА. Ослабление помехи несимметричного вида, наложенной на входной сигнал, – действующего напряжения синусоидальной формы частотой (50±0,5) Гц – не менее 20 дБ. Значение сигнала на входе канала ввода ТИТ, включая составляющие помехи, не должно выходить за пределы рабочего диапазона. Время обновления значений ТИТ – 200 мс (параметр контроллера CA101E). Предел допускаемого значения основной приведенной погрешности (g) устройства (каналов ТИТ) равен ±0,25 %. Предел допускаемого значения дополнительной приведенной погрешности устройства (каналов ТИТ), вызываемой изменением температуры окружающей среды на каждые 10°C, равен 0,5g. Характеристики каналов ТСУстройство при номинальном напряжении для входных сигналов Uном = 24 В постоянного тока обеспечивает ввод пассивных дискретных (двоичных) сигналов с характеристиками:статические:
минимальное сопротивление датчика для разомкнутой цепи – 50 кОм;
максимальное сопротивление датчика для замкнутой цепи – 150 Ом;
временные:
минимальное значение длительности установившегося состояния сигнала (постоянная времени фильтра «дребезга» контактов датчика) – 20 мс.
Характеристики внешних стыков связи устройства
Число внешних стыков для передачи данных – 2 (С1 и С2). Физические характеристики интерфейсных сигналов стыков C1 и C2 соответствуют стандарту RS 232. Цепи стыков С1 и С2 имеют общую гальваническую цепь с корпусом устройства. Режим передачи данных на стыке С2 – асинхронный, на стыке С1 – устанавливается пользователем: синхронный или асинхронный. Скорость передачи информации на стыках устанавливается пользователем:для стыка C1: 100; 200; 300; 600; 1200; 2400; 4800; 9600;19200; 38400 бит/с;для стыка C2: 300; 1200; 2400; 4800; 9600;19200 бит/с.Работа устройства
Устройство представляет собой многопроцессорное устройство с распределенной централизованной структурой (см. рисунок 2). Подчиненные контроллеры автономно обеспечивают выполнение функциональных задач по вводу сигналов. Ведущий контроллер магистрали осуществляет циклический опрос подчиненных контроллеров, собирая информацию о контролируемом объекте. В качестве ведущего контроллера устройства используется контроллер связи типа BH241E. Подчиненные функциональные контроллеры обеспечивают ввод и первичную обработку информации ТС и ТИТ.
Рисунок 2 – Структура распределенного устройства с централизованным управлением. Здесь: T – терминатор; M – (Master) ведущий контроллер магистрали; S – (Slave) подчиненный контроллер магистрали
Рисунок 3 - Схема физического подключения контроллеров к магистрали RS?485. Здесь: К – контроллер, ТА – терминатор активный, T – терминатор пассивный

Рисунок 4 – Схема структурная устройства. Здесь: ТА – терминатор активный, T – терминатор пассивный
- значения скоростей передачи для стыков С1 и C2 согласно п. 1. 3. 3. 4;
- временной интервал между посылками на передачу;
- режим передачи для стыка С1: синхронный или асинхронный;
- параметры протокола ТМ800А:
- количество подциклов ТС и ТИТ;
- формат передаваемых значений ТИТ: однобайтные или двухбайтные.
погашен, затем красный – ошибка ОЗУ1;
погашен, затем зеленый – ошибка ПЗУ (нарушение контрольной суммы);
красный, затем зеленый – ошибка ОЗУ2.
- запроса:
TYPE – тип сигналов: ТС или ТИТ;
NQ – число запрашиваемых каналов: 1; 8; 16; 32; 64;
- обработчика ответа:
Таблица 3
Ток на входе канала ТИТ, мА | Представление значения ТИТ в формате | |
однобайтном | двухбайтном | |
плюс 5 мА | +250 | +32000 |
0 мА | ±0 | ±0 |
минус 5 мА | -250 | -32000 |
Вводная часть каналов ТС устройства
Схема вводной части каналов ТС устройства и подключения датчиков представлена на рисунке 5. Стабилитрон обеспечивает необходимый порог чувствительности канала. Резисторы клеммника определяют входной импеданс канала для подавления входных помех. Диоды выполняют функции защиты элементов входного тракта от помех повреждающего вида. Общий проводник датчиков ТС, соединен с отрицательным полюсом источника питания, который, в свою очередь, соединен с зажимом для заземления шкафа.
Рисунок 5 – Схема вводной части каналов ТС устройства и подключения датчиков. Показаны цепи одной группы каналов. Здесь: Rш – сопротивление шлейфа проводов к датчику и обратно
Вводная часть каналов ТИТ устройства
Схема вводной части каналов ТИТ устройства представлена на рисунке 6. Ток датчиков ТИТ проходит через шунт на входе канала ТИТ. Клемма для подключения обратных проводников датчиков соединена с зажимом заземления шкафа устройства. Напряжение, пропорциональное величине входного тока, поступает через мультиплексор MX на нормирующий усилитель. Схема включения усилителя обеспечивает смещение его выходного напряжения для согласования с униполярным входом АЦП. Разрешающая способность АЦП контроллера – 12 двоичных разрядов. Для защиты входных цепей от повреждающих помех параллельно шунту установлен варистор, ограничивающий падение на шунте до 6 В. Сопротивление шлейфа проводов не должно превышать 1 кОм.
Рисунок 6 – Схема вводной части каналов ТИТ устройства. Показаны цепи одной группы каналов. Здесь: Rш – сопротивление шлейфа проводов к датчику и обратно; MX - мультиплексор
Состав изделия
Основные технические характеристики составных частей устройства, их внешний вид, устройство и работа приведены в приложении. Внешний вид устройства приведен на рисунке 7.
Рисунок 7 – Вид устройства с открытой дверцей шкафа

Рисунок 8 – Расположение изделий внутри шкафа устройства
Таблица 4
Назначение выводов клеммников ТС для внешних подключений устройства
Клеммник/зажим | Назначение | Клеммник/зажим | Назначение |
A10/A1 | Вход 1 ТС | A10/C1 | Вход 17 ТС |
A10/A2 | Вход 2 ТС | A10/C2 | Вход 18 ТС |
A10/A3 | Вход 3 ТС | A10/C3 | Вход 19 ТС |
A10/A4 | Вход 4 ТС | A10/C4 | Вход 20 ТС |
A10/A5 | Вход 5 ТС | A10/C5 | Вход 21 ТС |
A10/A6 | Вход 6 ТС | A10/C6 | Вход 22 ТС |
A10/A7 | Вход 7 ТС | A10/C7 | Вход 23 ТС |
A10/A8 | Вход 8 ТС | A10/C8 | Вход 24 ТС |
A10/A9 | Входы 1-8 ТС (обратный) | A10/C9 | Входы 17-24 ТС (обратный) |
A10/B1 | Вход 9 ТС | A10/D1 | Вход 25 ТС |
A10/B2 | Вход 10 ТС | A10/D2 | Вход 26 ТС |
A10/B3 | Вход 11 ТС | A10/D3 | Вход 27 ТС |
A10/B4 | Вход 12 ТС | A10/D4 | Вход 28ТС |
A10/B5 | Вход 13 ТС | A10/D5 | Вход 29 ТС |
A10/B6 | Вход 14 ТС | A10/D6 | Вход 30 ТС |
A10/B7 | Вход 15 ТС | A10/D7 | Вход 31 ТС |
A10/B8 | Вход 16 ТС | A10/D8 | Вход 32 ТС |
A10/B9 | Входы 9-16 ТС (обратный) | A10/D9 | Входы 25-32 ТС (обратный) |
A6/A1 | Вход 33 ТС | A6/C1 | Вход 49 ТС |
A6/A2 | Вход 34 ТС | A6/C2 | Вход 50 ТС |
A6/A3 | Вход 35 ТС | A6/C3 | Вход 51 ТС |
A6/A4 | Вход 36 ТС | A6/C4 | Вход 52 ТС |
A6/A5 | Вход 37 ТС | A6/C5 | Вход 53 ТС |
A6/A6 | Вход 38 ТС | A6/C6 | Вход 54 ТС |
A6/A7 | Вход 39 ТС | A6/C7 | Вход 55 ТС |
A6/A8 | Вход 40 ТС | A6/C8 | Вход 56 ТС |
A6/A9 | Входы 33-40 ТС (обратный) | A6/C9 | Входы 49-56 ТС (обратный) |
A6/B1 | Вход 41 ТС | A6/D1 | Вход 57 ТС |
A6/B2 | Вход 42 ТС | A6/D2 | Вход 58 ТС |
A6/B3 | Вход 43 ТС | A6/D3 | Вход 59 ТС |
A6/B4 | Вход 44 ТС | A6/D4 | Вход 60 ТС |
A6/B5 | Вход 45 ТС | A6/D5 | Вход 61 ТС |
A6/B6 | Вход 46 ТС | A6/D6 | Вход 62 ТС |
A6/B7 | Вход 47 ТС | A6/D7 | Вход 63 ТС |
A6/B8 | Вход 48 ТС | A6/D8 | Вход 64 ТС |
A6/B9 | Входы 41-48 ТС (обратный) | A6/D9 | Входы 57-64 ТС (обратный) |
A11/A1 | Вход 65 ТС | A11/C1 | Вход 81 ТС |
A11/A2 | Вход 66 ТС | A11/C2 | Вход 82 ТС |
A11/A3 | Вход 67 ТС | A11/C3 | Вход 83 ТС |
A11/A4 | Вход 68 ТС | A11/C4 | Вход 84 ТС |
A11/A5 | Вход 69 ТС | A11/C5 | Вход 85 ТС |
A11/A6 | Вход 70 ТС | A11/C6 | Вход 86 ТС |
A11/A7 | Вход 71 ТС | A11/C7 | Вход 87 ТС |
A11/A8 | Вход 72 ТС | A11/C8 | Вход 88 ТС |
A11/A9 | Входы 65-72 ТС (обратный) | A11/C9 | Входы 81-88 ТС (обратный) |
A11/B1 | Вход 73 ТС | A11/D1 | Вход 89 ТС |
A11/B2 | Вход 74 ТС | A11/D2 | Вход 90 ТС |
A11/B3 | Вход 75 ТС | A11/D3 | Вход 91 ТС |
A11/B4 | Вход 76 ТС | A11/D4 | Вход 92ТС |
A11/B5 | Вход 77 ТС | A11/D5 | Вход 93 ТС |
A11/B6 | Вход 78 ТС | A11/D6 | Вход 94 ТС |
A11/B7 | Вход 79 ТС | A11/D7 | Вход 95 ТС |
A11/B8 | Вход 80 ТС | A11/D8 | Вход 96 ТС |
A11/B9 | Входы 73-80 ТС (обратный) | A11/D9 | Входы 89-96 ТС (обратный) |
A7/A1 | Вход 97 ТС | A7/C1 | Вход 113 ТС |
A7/A2 | Вход 98 ТС | A7/C2 | Вход 114 ТС |
A7/A3 | Вход 99 ТС | A7/C3 | Вход 115 ТС |
A7/A4 | Вход 100 ТС | A7/C4 | Вход 116 ТС |
A7/A5 | Вход 101 ТС | A7/C5 | Вход 117 ТС |
A7/A6 | Вход 102 ТС | A7/C6 | Вход 118 ТС |
A7/A7 | Вход 103 ТС | A7/C7 | Вход 119 ТС |
A7/A8 | Вход 104 ТС | A7/C8 | Вход 120 ТС |
A7/A9 | Входы 97-104 ТС (обратный) | A7/C9 | Входы 113-120 ТС (обратный) |
A7/B1 | Вход 105 ТС | A7/D1 | Вход 121 ТС |
A7/B2 | Вход 106 ТС | A7/D2 | Вход 122 ТС |
A7/B3 | Вход 107 ТС | A7/D3 | Вход 123 ТС |
A7/B4 | Вход 108 ТС | A7/D4 | Вход 124 ТС |
A7/B5 | Вход 109 ТС | A7/D5 | Вход 125 ТС |
A7/B6 | Вход 110 ТС | A7/D6 | Вход 126 ТС |
A7/B7 | Вход 111 ТС | A7/D7 | Вход 127 ТС |
A7/B8 | Вход 112 ТС | A7/D8 | Вход 128 ТС |
A7/B9 | Входы 105-112 ТС (обратный) | A7/D9 | Входы 121-128 ТС (обратный) |
Таблица 5
Назначение выводов клеммников ТИТ для внешних подключений устройства
Клеммник/зажим | Назначение | Клеммник/зажим | Назначение |
A12/A1 | Вход 1 ТИТ | A12/C1 | Вход 17 ТИТ |
A12/A2 | Вход 2 ТИТ | A12/C2 | Вход 18 ТИТ |
A12/A3 | Вход 3 ТИТ | A12/C3 | Вход 19 ТИТ |
A12/A4 | Вход 4 ТИТ | A12/C4 | Вход 20 ТИТ |
A12/A5 | Вход 5 ТИТ | A12/C5 | Вход 21 ТИТ |
A12/A6 | Вход 6 ТИТ | A12/C6 | Вход 22 ТИТ |
A12/A7 | Вход 7 ТИТ | A12/C7 | Вход 23 ТИТ |
A12/A8 | Вход 8 ТИТ | A12/C8 | Вход 24 ТИТ |
A12/A9 | Вход 1-8 ТИТ (обратный) | A12/C9 | Входы 17-24 ТИТ (обратный) |
A12/B1 | Вход 9 ТИТ | A12/D1 | Вход 25 ТИТ |
A12/B2 | Вход 10 ТИТ | A12/D2 | Вход 26 ТИТ |
A12/B3 | Вход 11 ТИТ | A12/D3 | Вход 27 ТИТ |
A12/B4 | Вход 12 ТИТ | A12/D4 | Вход 28ТИТ |
A12/B5 | Вход 13 ТИТ | A12/D5 | Вход 29 ТИТ |
A12/B6 | Вход 14 ТИТ | A12/D6 | Вход 30 ТИТ |
A12/B7 | Вход 15 ТИТ | A12/D7 | Вход 31 ТИТ |
A12/B8 | Вход 16 ТИТ | A12/D8 | Вход 32 ТИТ |
A12/B9 | Обратный входов 9-16 ТИТ | A12/D9 | Входы 25-32 ТИТ (обратный) |
A8/A1 | Вход 33 ТИТ | A8/C1 | Вход 49 ТИТ |
A8/A2 | Вход 34 ТИТ | A8/C2 | Вход 50 ТИТ |
A8/A3 | Вход 35 ТИТ | A8/C3 | Вход 51 ТИТ |
A8/A4 | Вход 36 ТИТ | A8/C4 | Вход 52 ТИТ |
A8/A5 | Вход 37 ТИТ | A8/C5 | Вход 53 ТИТ |
A8/A6 | Вход 38 ТИТ | A8/C6 | Вход 54 ТИТ |
A8/A7 | Вход 39 ТИТ | A8/C7 | Вход 55 ТИТ |
A8/A8 | Вход 40 ТИТ | A8/C8 | Вход 56 ТИТ |
A8/A9 | Обратный входов 33-40 ТИТ | A8/C9 | Входы 49-56 ТИТ (обратный) |
A8/B1 | Вход 41 ТИТ | A8/D1 | Вход 57 ТИТ |
A8/B2 | Вход 42 ТИТ | A8/D2 | Вход 58 ТИТ |
A8/B3 | Вход 43 ТИТ | A8/D3 | Вход 59 ТИТ |
A8/B4 | Вход 44 ТИТ | A8/D4 | Вход 60 ТИТ |
A8/B5 | Вход 45 ТИТ | A8/D5 | Вход 61 ТИТ |
A8/B6 | Вход 46 ТИТ | A8/D6 | Вход 62 ТИТ |
A8/B7 | Вход 47 ТИТ | A8/D7 | Вход 63 ТИТ |
A8/B8 | Вход 48 ТИТ | A8/D8 | Вход 64 ТИТ |
A8/B9 | Входы 41-48 ТИТ (обратный) | A8/D9 | Входы 57-64 ТИТ (обратный) |
Маркировка и пломбирование
На шкафу нанесена маркировка:
- на боковой стенке с внешней стороны:
сокращенное обозначение устройства «KP2011ER»;
заводской номер;
квартал и год изготовления;
товарный знак предприятия-изготовителя;
степень защиты («IP54»);
на модулях, входящих в состав устройства:
обозначение контроллера (например, «CD108E»);
нумерация клеммников и зажимов.
На потребительской таре нанесено:
сокращенное обозначение устройства;
дата упаковывания.
На транспортной таре нанесено:
наименование грузополучателя;
наименование пункта назначения;
наименование грузоотправителя;
наименование пункта отправления;
масса брутто и нетто грузового места (в килограммах);
габаритные размеры грузового места (в кубических метрах);
объем грузового места (в кубических метрах);
манипуляционный знак «Верх».
Упаковка
Устройство, предварительно обернутое бумагой, упакованное в герметичный чехол из полиэтиленовой пленки, в который вложен мешочек с селикагелем, помещается в картонную коробку и (при транспортировании железнодорожным транспортом) укладывается в транспортную тару — фанерный или дощатый ящик. Пространство между упакованным устройством и стенками ящика заполняется материалом, обладающим амортизационными свойствами. Ящик внутри выстилается водонепроницаемым материалом. Пакет с эксплуатационными документами помещается в герметичный чехол из полиэтиленовой пленки и укладывается в коробку или под крышку ящика. Дата консервации совпадает с датой упаковывания.Срок защиты без переконсервации — 1 год.
Использование по назначению
Меры безопасности
К работе с устройством допускаются лица, ознакомленные с настоящим документом, а также прошедшие инструктаж по технике безопасности при работе с электрооборудованием, питаемым напряжением до 1000 В. Перед подключением устройства к сети питания необходимо убедиться в надежности подключения металлических токоведущих частей устройства к контуру защитного заземления.Подготовка устройства к работе
ВНИМАНИЕ! Цепи стыков С1 и С2 устройства имеют общую гальваническую цепь с корпусом устройства!
- параметры стыков контроллера связи:
значения скоростей передачи для стыков С1 и C2 согласно п. 1. 3. 3. 4;
временной интервал между посылками на передачу;
режим передачи для стыка С1: синхронный или асинхронный;
- параметры опроса подчиненных контроллеров:
ADR – адрес подчиненного контроллера: от 0 до 249. Значению 0 соответствует блокировка текущего запроса;
TYPE – тип сигналов: ТС или ТИТ;
NQ – число запрашиваемых каналов: 1; 8; 16; 32; 64;
NF – число фактически используемых каналов контроллера, начиная с первого;
область опроса подчиненных контроллеров: номера начальной и конечной строк таблицы опроса;
- параметры протокола ТМ800А:
количество подциклов ТС и ТИТ;
формат передаваемых значений ТИТ: однобайтные или двухбайтные.
Конфигурирование контроллера связи устройства
- подключите штатным кабелем типа ZA704E стык C2 контроллера связи к одному из СОМ?портов ПЭВМ;
- запустите на ПЭВМ программу TM800A из комплекта поставки устройства;
- установите для выбранного COM-порта скорость обмена 9600 бит/с, режим управления потоком – «нет»;
- установите индивидуальный адрес контроллера связи, нанесенный на корпус контроллера, или универсальный адрес - 254;
- согласно руководству пользователя программы TM800A считайте, а затем модифицируйте, при необходимости, требуемые параметры контроллера связи.
Проверка функционирования устройства
Проверка функционирования каналов ТИТ устройства
Для проверки функционирования каналов ТИТ устройства выполните следующее:
- подключите штатным кабелем типа ZA704E стык C2 контроллера связи к одному из СОМ?портов ПЭВМ;
- запустите на ПЭВМ программу TM800A из комплекта поставки устройства;
- установите режим выдачи устройством двухбайтных значений ТИТ;
- подключите ко входу канала 1 ТИТ устройства калибратор тока класса не хуже 0,05 для диапазона выходных токов ±5 мА;
- установите на выходе калибратора ток величиной минус 5 мА. Установите в окне ТИТ коэффициент равным 5/32000. Наблюдайте в окне ТИТ программы TM800A значение на выходе выбранного канала ТИТ. Определите максимальное отклонение выходного значения от показаний калибратора и рассчитайте приведенное значение (g) погрешности канала ТИТ по формуле:
![]() (1)
(1)
где xо – эталонное значение входного сигнала, приведенного к шкале выходных сигналов, соответствующее контрольной точке диапазона измерений;
x – значение отсчета на выходе канала ТИТ, соответствующее максимальному отклонению от эталонного;
xn – нормирующее значение выходного сигнала, равное 100% диапазона измерения.
- выполните действия перечисления 5) для значений входного тока: минус 4,0; минус 3,0; минус 2,0; минус 1,0; 0; 1; 2; 3; 4; 5 мА;
- выполните действия перечислений 5) и 6) для всех каналов ТИТ устройства.
Устройство считается выдержавшим испытания по данному пункту, если при выполнении проверок по перечислениям 5) и 7) максимальное значение погрешности не превышает ±0,25 %.
Проверка функционирования каналов ТС устройства
Для проверки функционирования каналов ТС устройства выполните следующее:
- подключите штатным кабелем типа ZA704E стык C2 контроллера связи к одному из СОМ-портов ПЭВМ;
- запустите на ПЭВМ программу TM800A из комплекта поставки устройства;
- подключите ко входу канала 1 ТС устройства имитатор датчика. В положении «Замкнуто» датчик должен иметь сопротивление не более 150 Ом, в положении «Разомкнуто» – не менее 50 кОм. Изменяя состояние имитатора датчика, наблюдайте состояние на выходе соответствующего канала в окне ТС программы TM800A;
- выполните действия 3) для всех каналов ТС устройства.
Устройство считается выдержавшим испытания по данному пункту, если при выполнении проверок по перечислениям 3) и 4) состояние на выходе канала ТС всегда соответствует состоянию имитатора датчика.
Проверка стыков связи устройства
Для проверки функционирования стыка связи C2 устройства выполните следующее:
- подключите штатным кабелем типа ZA704E стык C2 контроллера связи к одному из СОМ?портов ПЭВМ;
- запустите на ПЭВМ программу TM800A из комплекта поставки устройства;
- установите для СОМ-порта ПЭВМ режим асинхронной передачи со скоростью 9600 бит/с;
Стык С2 считается работоспособным, если удается считывать и модифицировать параметры контроллера связи.
Для проверки функционирования стыка связи C1 устройства выполните следующее:
- подключите штатным кабелем типа ZA704E стык C2 контроллера связи к одному из СОМ?портов ПЭВМ;
- запустите на ПЭВМ программу TM800A из комплекта поставки устройства;
- установите для стыка C1 режим асинхронной передачи со скоростью 9600 бит/с;
- отключите питание устройства;
- переключите разъем кабеля ZA704E со стыка C2 на стык C1;
- включите питание устройства.
Стык C1 считается работоспособным, если в окнах ТИТ и ТС программы TM800A отображаются реальные состояния датчиков ТС и значений тока на входах каналов ТИТ.
Монтаж устройства
Перед началом монтажа необходимо выполнить разметку места под шкафы и мест заделки крепёжных дюбелей согласно установочному чертежу (рисунок 9). Элементы крепления шкафа (комплект крепления шкафа) при транспортировке на шкафы не устанавливаются. Они уложены в герметичную упаковку, закреплённую внутри шкафа.
Рисунок 9 – Установочные размеры шкафов CENEL 600x600x250
- Проушина. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 шт.
- Винт М6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 шт.
- Гайка в сборе с полимерным колпачком. . . . . . . . . 4 шт.
- при помощи отвёртки вынуть пластиковые заглушки из отверстий с тыльной стороны шкафа (рисунок 10);
- завести снаружи в крепёжное отверстие гайку с полимерным колпачком, чтобы шляпка колпачка упёрлась снаружи в тыльную стенку шкафа. Сначала в пазы отверстия завести гайку, затем колпачок повернуть на 90° по часовой стрелке и вставить до упора бобышек колпачка в пазы отверстия:
- приложить проушины зенкованной частью отверстий наружу и закрутить винты М6 до упора отверткой с крестовидным жалом.
Рисунок 10 – Пространственное положение отверстий для установки проушин шкафа
Возможные неисправности и способы их устранения
Перечень возможных неисправностей, вероятные причины их проявления и способы устранения этих неисправностей приведены в таблице 6.Таблица 6
Наименование неисправности, внешнее проявление и дополнительные признаки | Вероятная причина неисправности | Способ устранения неисправности |
1. Значения погрешности только некоторых каналов ТИТ превышают допустимую. Параметризация контроллера связи выполнена правильно | Вышел из строя контроллер ввода ТИТ | Заменить неисправный контроллер |
2. Значения погрешности всех каналов ТИТ превышают допустимую. Состояния всех каналов ТС отображаются неверно. Параметризация контроллера связи выполнена правильно | 1. Вышел из строя контроллер ввода ТИТ | Заменить неисправный контроллер |
2. Вышел из строя один из подчиненных контроллеров и блокирует магистраль | Заменить неисправный контроллер | |
3. Обрыв линии связи стыка «Порт» контроллера связи | Восстановить соединение | |
4. Обрыв цепей согласования на концах магистрали | Восстановить соединение | |
5. Замыкание одной или обеих линий внутренней магистрали на землю или между собой | Устранить замыкание | |
3. Состояние на выходе некоторых каналов ТС не соответствует состоянию датчика. Параметризация контроллера связи выполнена правильно | Вышел из строя контроллер ввода ТС | Заменить неисправный контроллер |
Техническое обслуживание
Обслуживание
Виды и периодичность технического обслуживания устройства приведены в таблице 7.Таблица 7
Вид технического обслуживания | Периодичность |
| Один раз в месяц |
| Один раз в год |
Консервация
Производить расконсервацию при хранении устройства более 1 года путем снятия оберточной бумаги и удаления мешочков с селикагелем. Производить переконсервацию устройства частичным вскрытием транспортной тары и заменой селикагеля с последующим закрытием транспортной тары. Производить расконсервацию, переконсервацию и упаковывание следует в закрытых вентилируемых помещениях при температуре и относительной влажности окружающего воздуха, соответствующих условиям хранения (см. 4. 1) при отсутствии в окружающей атмосфере агрессивных примесей.Хранение и транспортирование
Хранение
Устройство следует хранить в упаковке предприятия-изготовителя в закрытых отапливаемых помещениях при температуре окружающего воздуха от плюс 5 до плюс 40 °С и относительной влажности 80 % при температуре плюс 25 оС. В местах хранения устройства в окружающем воздухе должны отсутствовать кислотные, щелочные и другие примеси и токопроводящая пыль. Расстояние между стенами, полом хранилища и устройствами должно быть не менее 100 мм. Расстояние между отопительным оборудованием хранилищ и устройствами должно быть не менее 0,5 м. Допустимая длительность хранения устройства в транспортной таре 6 месяцев с момента изготовления, при этом транспортная тара должна быть без подтеков и загрязнения.Транспортирование
Транспортирование устройства в упаковке предприятия-изготовителя производится всеми видами транспорта в крытых транспортных средствах (железнодорожным, автомобильным, водным транспортом – в трюмах, самолетом – в отапливаемых герметизированных отсеках) при температуре окружающего воздуха от минус 50 до плюс 55 °С и относительной влажности (95 ± 3) % при температуре плюс 35 °С.
Таблица внутренних соединений устройства
№ | Откуда идет | Куда поступает | Проводник, жгут | Примечание | ||||||||||||
Поз. обозн. | Изделие | Соедини- | Контакт | Цепь | Вх/вых | Поз. обозн. | Изделие | Соедин- | Контакт | Цепь | Вх/вых | Сечение, мм2 | Цвет | Длина, мм | ||
| Внешние подключения |
|
|
|
|
|
|
|
|
|
|
|
|
| ||
1 | A1 | CU501E | Сеть | 1 | ~220V | вход |
|
|
|
|
|
| 0,75 | коричневый |
| Шнур 5УПИА. 506. 015?010 |
2 | A1 | CU501E | Сеть | 2 | N | вход |
|
|
|
|
|
| 0,75 | синий |
| Шнур 5УПИА. 506. 015?010 |
3 | A1 | CU501E | Сеть | 3 | GND | вход |
|
|
|
|
|
| 0,75 | желтый |
| Шнур 5УПИА. 506. 015?010 |
| Внутренний монтаж |
|
|
|
|
|
|
|
|
|
|
|
|
| ||
1 |
| Шкаф | X1 | 1 | GND | выход | A9 | BH241E | GND | 1 | GND | вход | 0,75 | желтый | 1000 | Ветвь1 |
2 | A9 | BH241E | GND | 2 | GND | вход | A5 | BY201E | GND | 1 | GND | вход | 0,75 | желтый | 250 |
|
3 | A5 | BY201E | GND | 2 | GND | вход | A2 | CD108E | GND | 1 | GND | вход | 0,75 | желтый | 250 |
|
4 | A2 | CD108E | GND | 2 | GND | вход | A3 | CD108E | GND | 1 | GND | вход | 0,75 | желтый | 250 |
|
5 | A3 | CD108E | GND | 2 | GND | вход | A4 | CA101E | GND | 1 | GND | вход | 0,75 | желтый | 250 |
|
6 | A4 | CA101E | GND | 2 | GND | вход | A1 | CU501E | Выход | 4 | 0V | выход | 0,75 | желтый | 1000 |
|
7 | A1 | CU501E | Выход | 1 | +24V | выход | A5 | BY201E | "=24V" | 2 | +24V | вход | 0,75 | синий |
| Основной канал питания |
8 | A1 | CU501E | Выход | 2 | 0V | выход | A5 | BY201E | "=24V" | 1 | -24V | вход | 0,75 | коричневый |
|
|
9 | A5 | BY201E | "=24V" | 2 | +24V | выход | A2 | CD108E | "=24V" | 2 | +24V | вход | 0,75 | синий |
|
|
10 | A5 | BY201E | "=24V" | 1 | -24V | выход | A2 | CD108E | "=24V" | 1 | -24V | вход | 0,75 | коричневый |
|
|
11 | A2 | CD108E | "=24V" | 2 | +24V | выход | A3 | CD108E | "=24V" | 2 | +24V | вход | 0,75 | синий |
|
|
12 | A2 | CD108E | "=24V" | 1 | -24V | выход | A3 | CD108E | "=24V" | 1 | -24V | вход | 0,75 | коричневый |
|
|
13 | A3 | CD108E | "=24V" | 2 | +24V | выход | A4 | CA101E | "=24V" | 2 | +24V | вход | 0,75 | синий |
|
|
14 | A3 | CD108E | "=24V" | 1 | -24V | выход | A4 | CA101E | "=24V" | 1 | -24V | вход | 0,75 | коричневый |
|
|
15 | A4 | CA101E | "=24V" | 2 | +24V | выход | A9 | BH241E | "=24V" | 2 | +24V | вход | 0,75 | синий |
|
|
16 | A4 | CA101E | "=24V" | 1 | -24V | выход | A9 | BH241E | "=24V" | 1 | -24V | вход | 0,75 | коричневый |
|
|
17 | A1 | CU501E | Выход | 5 | +24V | выход | A6 | JD302E | "=24V" | 2 | +24V | вход | 0,75 | синий |
|
|
18 | A1 | CU501E | Выход | 6 | 0V | выход | A6 | JD302E | "=24V" | 1 | -24V | вход | 0,75 | коричневый |
|
|
19 | A6 | JD302E | "=24V" | 2 | +24V | выход | A7 | JD302E | "=24V" | 2 | +24V | вход | 0,75 | синий |
|
|
20 | A6 | JD302E | "=24V" | 1 | -24V | выход | A7 | JD302E | "=24V" | 1 | -24V | вход | 0,75 | коричневый |
|
|
21 | A7 | JD302E | "=24V" | 2 | +24V | выход | A11 | JD302E | "=24V" | 2 | +24V | вход | 0,75 | синий |
|
|
22 | A7 | JD302E | "=24V" | 1 | -24V | выход | A11 | JD302E | "=24V" | 1 | -24V | вход | 0,75 | коричневый |
|
|
23 | A11 | JD302E | "=24V" | 2 | +24V | выход | A10 | JD302E | "=24V" | 2 | +24V | вход | 0,75 | синий |
|
|
24 | A11 | JD302E | "=24V" | 1 | -24V | выход | A10 | JD302E | "=24V" | 1 | -24V | вход | 0,75 | коричневый |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
25 | A5 | BY201E | "ПОРТ" | 2 | B | вх/вых | A2 | CD108E | "ПОРТ" | 2 | B | вх/вых | 1/0,2 | синий |
|
|
26 | A5 | BY201E | "ПОРТ" | 3 | A | вх/вых | A2 | CD108E | "ПОРТ" | 3 | A | вх/вых | 2/0,2 | красный | 280 |
|
27 | A5 | BY201E | "ПОРТ" | 4 | GND | вход | A2 | CD108E | "ПОРТ" | 4 | GND | вход | 3/0,2 | белый |
|
|
28 | A2 | CD108E | "ПОРТ" | 2 | B | вх/вых | A3 | CD108E | "ПОРТ" | 2 | B | вх/вых | 1/0,2 | синий |
|
|
29 | A2 | CD108E | "ПОРТ" | 3 | A | вх/вых | A3 | CD108E | "ПОРТ" | 3 | A | вх/вых | 2/0,2 | красный | 650 |
|
30 | A2 | CD108E | "ПОРТ" | 4 | GND | вход | A3 | CD108E | "ПОРТ" | 4 | GND | вход | 3/0,2 | белый |
|
|
31 | A3 | CD108E | "ПОРТ" | 2 | B | вх/вых | A4 | CA101E | "ПОРТ" | 2 | B | вх/вых | 1/0,2 | синий |
|
|
32 | A3 | CD108E | "ПОРТ" | 3 | A | вх/вых | A4 | CA101E | "ПОРТ" | 3 | A | вх/вых | 2/0,2 | красный | 250 |
|
33 | A3 | CD108E | "ПОРТ" | 4 | GND | вход | A4 | CA101E | "ПОРТ" | 4 | GND | вход | 3/0,2 | белый |
|
|
34 | A4 | CA101E | "ПОРТ" | 2 | B | вх/вых | A4 | CA101E | "ПОРТ" | 2 | B | вх/вых | 1/0,2 | синий |
|
|
35 | A4 | CA101E | "ПОРТ" | 3 | A | вх/вых | A9 | BH241E | "ПОРТ" | 3 | A | вх/вых | 2/0,2 | красный | 250 |
|
36 | A4 | CA101E | "ПОРТ" | 4 | GND | вход | A9 | BH241E | "ПОРТ" | 4 | GND | вход | 3/0,2 | белый |
|
|
37 | A9 | BH241E | "ПОРТ" | 2 | B | вх/вых | A9 | BH241E | "ПОРТ" | 3 | A | вх/вых |
|
|
| Рез-р МЛТ-0,125-130 Ом |
38 | A2 | CD108E | 1 |
|
|
| A10 | JD302E | 1 |
|
|
| ZA213E |
|
|
|
39 | A2 | CD108E | 2 |
|
|
| A10 | JD302E | 2 |
|
|
| ZA213E |
|
|
|
40 | A2 | CD108E | 3 |
|
|
| A10 | JD302E | 3 |
|
|
| ZA213E |
|
|
|
41 | A2 | CD108E | 4 |
|
|
| A10 | JD302E | 4 |
|
|
| ZA213E |
|
|
|
42 | A2 | CD108E | 5 |
|
|
| A6 | JD302E | 1 |
|
|
| ZA209E |
|
|
|
43 | A2 | CD108E | 6 |
|
|
| A6 | JD302E | 2 |
|
|
| ZA212E |
|
|
|
44 | A2 | CD108E | 7 |
|
|
| A6 | JD302E | 3 |
|
|
| ZA211E |
|
|
|
45 | A2 | CD108E | 8 |
|
|
| A6 | JD302E | 4 |
|
|
| ZA210E |
|
|
|
46 | A3 | CD108E | 1 |
|
|
| A11 | JD302E | 1 |
|
|
| ZA213E |
|
|
|
47 | A3 | CD108E | 2 |
|
|
| A11 | JD302E | 2 |
|
|
| ZA213E |
|
|
|
48 | A3 | CD108E | 3 |
|
|
| A11 | JD302E | 3 |
|
|
| ZA213E |
|
|
|
49 | A3 | CD108E | 4 |
|
|
| A11 | JD302E | 4 |
|
|
| ZA213E |
|
|
|
50 | A3 | CD108E | 5 |
|
|
| A7 | JD302E | 1 |
|
|
| ZA209E |
|
|
|
51 | A3 | CD108E | 6 |
|
|
| A7 | JD302E | 2 |
|
|
| ZA212E |
|
|
|
52 | A3 | CD108E | 7 |
|
|
| A7 | JD302E | 3 |
|
|
| ZA211E |
|
|
|
53 | A3 | CD108E | 8 |
|
|
| A7 | JD302E | 4 |
|
|
| ZA210E |
|
|
|
54 | A4 | CA101E | 1 |
|
|
| A12 | JD301E | 1 |
|
|
| ZA213E |
|
|
|
55 | A4 | CA101E | 2 |
|
|
| A12 | JD301E | 2 |
|
|
| ZA213E |
|
|
|
56 | A4 | CA101E | 3 |
|
|
| A12 | JD301E | 3 |
|
|
| ZA213E |
|
|
|
57 | A4 | CA101E | 4 |
|
|
| A12 | JD301E | 4 |
|
|
| ZA213E |
|
|
|
58 | A4 | CA101E | 5 |
|
|
| A8 | JD301E | 1 |
|
|
| ZA209E |
|
|
|
59 | A4 | CA101E | 6 |
|
|
| A8 | JD301E | 2 |
|
|
| ZA212E |
|
|
|
60 | A4 | CA101E | 7 |
|
|
| A8 | JD301E | 3 |
|
|
| ZA211E |
|
|
|
61 | A4 | CA101E | 8 |
|
|
| A8 | JD301E | 4 |
|
|
| ZA210E |
|
|
|
КОМПЛЕКТ ПРОГРАММНО-АППАРАТНЫХ СРЕДСТВ ТЕЛЕМЕХАНИКИ версия 1.5
Руководство программиста телемеханического комплекса
АННОТАЦИЯ
Настоящий документ предназначен для руководства программистов телемеханического комплекса (далее - комплекс) на базе Комплекта Программно-Аппаратных Средств ТелеМеханики версии 1.5 (далее - КОМПАС ТМ 1.05).
1. НАЗНАЧЕНИЕ И УСЛОВИЯ ПРИМЕНЕНИЯ ПРОГРАММЫ
Настоящая программа предназначена для управления телемеханическим комплексом на базе КОМПАС ТМ 1.5.
Для выполнения программы необходимо наличие УПУ, состоящего из IBM-совместимой ПЭВМ с адаптером магистрального канала (АМК),АБПУ и кабеля связи АМК - АБПУ. Минимальный набор программных средств представляет собой ОС MS-DOS и базовое программное обеспечение комплекса,включающее: рабочий модуль программы KOMPAS15.EXE и следующие служебные файлы :
1) FILE.FIL - файл-указатель по формированию и ведению базы данных;
2) FORMS.OUT - файл-список бланков форм отчетов;
3) PRNT.EXE - рабочий модуль программы подготовки отчета;
4) ZAGR11.EXE - рабочий модуль программы загрузки конфигурации в АБПУ;
5) CNF_PU.CNF - текстовый файл, в котором указаны пути и имена файлов конфигурации;
6) CNF_105.EXE - рабочий модуль конфигуратора системы;
Следующие файлы формируются программой трансляции исходного текста конфигурации комплекса
4) CONF.FI - файл текущей конфигурации. Содержит информацию о количестве и адресах УКП, задействованных по направлениям;
5) AKT.FI - файл заданий для всех УКП, указанные при формировании конфигурации;
6) NAKP.FI - файл наименований УКП;
7) NATI1.FI - файл наименований каналов ТИ1 для всех УКП;
8) NATI2.FI - файл наименований каналов ТИ2 для всех УКП;
9) NATII.FI - файл наименований каналов ТИИ для всех УКП;
10) NATС.FI - файл наименований ТС для всех УКП;
11) MAAKT.FI - служебная информация о задействованных каналах ТУ, ТИ, ТС и уставках допускового контроля;
12) TEZN.FI - файл текущего состояния всех подключенных УКП;
13) PAROL.FI - закодированный список паролей;
14) REG_IZM.FI - файл для хранения указанных при формировании конфигурации периодов регистрации значений по каналам ТИ и ТИИ;
15) UST.FI - файл для хранения параметров команд запроса уставок;
16) MASADR.PU - базовый файл конфигурации - массив адресов КП с распределением их по направлениям;
17) MASCHG.PU - файл слов событий;
18) MSAK1.PU - файл определения задействованности ТС;
19) MSAK2.PU - файл определения задействованности ТИТ;
20) MSAK3.PU - файл определения задействованности ТИИ;
21) MSCHG1.PU - файл битов флажков для отметки изменений по группе ТС;
22) MSCHG2.PU - файл битов флажков для отметки изменений по каналам ТИТ;
23) MSCHG3.PU - файл битов флажков для отметки изменений по каналам ТИИ;
24) MS1.PU - файл состояния обслуживаемых групп ТС;
25) MS2.PU - файл состояния обслуживаемых каналов ТИТ;
26) MS3.PU - файл состояния обслуживаемых каналов ТИИ;
27) MSZD.PU - файл заданий для формирования опросов КП;
28) MSTM.PU - файл периодов АПУС;
29) VBK.PU - файл формирования выборки ТС для отображения на щит;
30) MSTSK.PU - файл подмассивов перехода от ТС,обслуживаемого ПУ,к номеру ячейки и адресу КЩ,где этот ТС отображается;
31) CONFKK.PU - файл общих ключей;
32) MSTUK.PU - файл соответствия заготовок ТУ,принимаемых от КЩ,реальным об'ектам ТУ;
33) VB1.PU - файл формирования выборки ТС для ретрансляции наверх(резерв);
34) VB2.PU - файл формирования выборки ТИТ для ретрансляции наверх(резерв);
35) VB3.PU - файл формирования выборки ТИИ для ретрансляции наверх(резерв);
36) RTU.PU - файл переходных индексов для ТУ-Р(резерв);
37) MSTOT.PU - файл групп ячеек щита для режима группового контроля;
38) KEYKP.PU - файл групп ячеек для отображения изменения связи с КП;
39) CNF_KK.PU - файл внутренней конфигурации для БУЩ.В файл CNF_KK.PU об'единены массивы типа *.KK.Следующие пять массивов образуют блок конфигурации для каждого БУЩ,который присутствует в конфигурации:
USE_K.KK - массив задействованности ячеек щита(49 байт);
TC_OFF.KK - массив соответствия значений ТС состоянию "ОТКЛ"(49 байт);
KEY_OF.KK - массив соответствия положению ключа состоянию "ОТКЛ"(49 байт);
TYPE_K.KK - массив типов ячеек КЩ(49 байт);
ATTR_K.KK - массив аттрибутов отображения(64 байтa).
Блоки конфигурации располагаются в файле CNF_KK.PU последовательно в порядке увеличения номера задействованных БУЩ.
2. ХАРАКТЕРИСТИКИ ПРОГРАММЫ
2.1. Режим "Управление".
Функционирование программы включает следующие основные этапы:
1) загрузка в рабочую область оперативной памяти данных из служебных файлов конфигурации;
2) начальный сбор телеинформации со всех КП, включенных в конфигурацию комплекса (при запуске программы с ключом /R);
3) прием пароля оператора;
4) циклическую активизацию с заданными индивидуально по группам сигналов периодами и уровнями приоритета телемеханических функций опроса состояний сигналов УКП;
5) циклическую регистрацию текущей телеинформации в дисковых журналах с заданной индивидуально (по группам сигналов) периодичностью;
6) вывод по команде оператора на экран, принтер или в файл содержимого дисковых журналов по заданным формам с возможностью фильтрации записей по всем полям;
7) оперативное представление диспетчеру информации о техническом состоянии каналов и устройств комплекса.
3. ОБРАЩЕНИЕ К ПРОГРАММЕ
3.1. Запуск программы
3.1.1. Создайте отдельный каталог на винчестере и скопируйте в него рабочий модуль Программы с именем KOMPAS15.EXE, рабочий модуль программы подготовки документа PRNT.EXE и служебные файлы. Загрузка драйвера АМК осуществляется либо через autoexec.bat , либо непосредственно перез запуском программы.
3.1.2. Запуск рабочего модуля может производиться с ключами:
/R - для организации первичного сбора телеинформации с УКП при запуске программы (производится запрос оперативной телеинформации по всем УКП сигналов ТС, ТИТ и ТИИ);
/U - для возможности выбора объектов на графической мнемосхеме с помощью клавиатуры;
/P - для задания команд ТУ без запроса пароля оператора. В этом сеансе всем инициированным командам ТУ при регистрации присваивается имя исполнителя, идентифицированное системой при входе в программу;
/Cnn - для задания цвета указателя при работе на графической мнемосхеме с помощью клавиатуры (от 0 до 15);
/Ann - адрес АБПУ ( от 1 до 30).
3.1.3. После старта программы выводится сообщение "Выполняется загрузка данных...". После окончания загрузки данных выводится сообщение "Загрузка данных завершена". Возможны также следующие предупредительные сообщения "Не установлен драйвер манипулятора "мышь" - управление производится с клавиатуры и "Не найден файл указаний по документированию" - содержание этого служебного файла определяет ведение режимных журналов.
Нажать клавишу F7 ("Пароль") на клавиатуре. Программа выводит расширенную строку подсказки.
3.1.4. Нажать клавишу F4 ("ВВОД ПАРОЛЯ") на клавиатуре.
3.1.5. В ответ на приглашение системы ввести личный пароль. Вводимый пароль не отображается на экране. При идентификации корректного пароля программа не выдает предупредительных сообщений и готова к работе. При неверно набранном пароле программа выдает предупредительное сообщение. Введенный рабочий пароль, принятый программой, становится текущим.
3.1.6. Нажать клавишу ESC ("Возврат") на клавиатуре. Программа изменит строку подсказки.
3.1.7. Нажать комбинацию клавиш "SHIFT-F9". При этом присходит проверка связи ПЭВМ с АБПУ и выдается сообщение
"Проверка готовности АМК...". Обнаруженная ошибка оборудования сопровождается выдачей одного из следующих сообщений и выходу в DOS: "Не установлен драйвер АМК"; "Ошибка при контрольном обмене с АМК".
3.1.8. При положительном результате проверки программа выдает сообщение "Загрузить конфигурацию в АБПУ (Y/N) ?".При нажатии клавиши "Y" происходит загрузка конфигурации посредством программы ZAGR11.EXE. Данная программа загружает в оперативную память пункта управления данные файлов конфигурации,подготовленных транслятором CNF_105.EXE на основе текстового файла конфигурации пользователя.Имена файлов конфигурации типа *.PU программа загрузки определяет из файла CNF_PU.CNF. Файл с именем CNF_PU.CNF создается в любом текстовом редакторе. В него следует занести пути и имена файлов типа *.PU. Причем,последовательность указания должна быть строго соответствующей нижеуказанному перечню файлов типа *.PU.Например,для ПУ с адресом 1 в файле CNF_PU.PU должен быть указан следующий блок:
//блок задания имен файлов конфигурации для ПУ с адресом 1 @01 d:\koncm\conf\masadr.pu //rem d:\koncm\conf\maschg.pu d:\koncm\conf\msak1.pu d:\koncm\conf\msak2.pu d:\koncm\conf\msak3.pu d:\koncm\conf\mschg1.pu d:\koncm\conf\mschg2.pu d:\koncm\conf\mschg3.pu \\rem d:\koncm\conf\ms1.pu d:\koncm\conf\ms2.pu d:\koncm\conf\ms3.pu d:\koncm\conf\mszd.pu d:\koncm\conf\mstm.pu d:\koncm\conf\vbk.pu d:\koncm\conf\mstck.pu d:\koncm\conf\confkk.pu ;rem d:\koncm\conf\mstuk.pu d:\koncm\conf\vb1.pu d:\koncm\conf\vb2.pu d:\koncm\conf\vb3.pu d:\koncm\conf\rtu.pu d:\koncm\conf\mstot.pu d:\koncm\conf\keykp.pu *rem d:\koncm\conf\cnf_kk.pu @end_01
Внутри блока строка,начинающаяся с латинской буквы,рассматривается как имя файла конфигурации для данного ПУ и выполняется попытка открыть этот файл для переноса данных в оперативную память пункта управления.
Перед загрузкой данных программа ZAGR11.EXE устанавливает в АМК конфигурацию ,состоящую из одного АБПУ с адресом,указанным в командной строке после ключа "/A", либо установленным по умолчанию (= 3).После этого происходит запуск АМК на опрос АБПУ с установленным адресом.В АБПУ выдается команду сброса конфигурации с тем, чтобы освободить память ПУ от "старой" конфигурации. После этого данные файлов пересылаются в память АБПУ в той последовательности,в которой они указаны в файле CNF_PU.CNF.После приема последнего массива конфигурации ПУ начинает работу.
Ошибка при загрузке вызовет выход в ДОС.
3.1.9. При положительном результате загрузки программа переходит в режим отображения общей мнемосхемы ( если она установлена в системе ), иначе программа выводит на экран основное окно направлений и начинает обслуживание телекомплекса по установленной конфигурации.
3.1.10. Отображение информации программой предусматривается в двух режимах: табличном и графическом. Переход из одного режима в другой осуществляется по клавише F5 при наличии подсказки в нижней строке экрана. Наличие мнемосхем объектов оговаривается при установке телекомплекса и отмечено символом ">" в списке УКП при работе в графическом режиме. Если программа не обнаруживает мнемосхемы на конкретный объект (УКП) при переходе из табличного в графический режим, она выводит сообщение "Отсутствует мнемосхема или файл описания".
После запуска головная программа переходит в режим отображения общей мнемосхемы (если она установлена в системе). Переход в общую мнемосхему из любого окна - по клавише F6. В служебном поле экрана общей мнемосхемы отображаются текущая дата и астрономическое время. Выбор УКП осуществляется "мышью" или стрелками клавиатуры (выбранное стрелками УГО КП выделяется цветом) и клавишей Enter. Если при позиционировании "мышью" УГО УКП нажать левую клавишу - на экран будет выведена мнемосхема выбранного УКП (если в пользовательской библиотеке установлен файл графического образа, а в текущем каталоге - файл-описатель мнемосхемы), если правую, то выводятся графические таблицы значений ТИТ и ТИИ.
На общей мнемосхеме в темпе обслуживания УКП динамически активизируются:
а) поля индикации УГО УКП, по которым зарегистрировано пропадание, остановка или восстановление связи с УПУ;
б) поля аварийной индикации УГО УКП, по которым зарегистрированы изменения состояния ТС;
в) поля аварийной индикации УГО УКП, по которым зарегистрированы выходы значений ТИТ за уставки допускового контроля.
Аварийная сигнализация по п.п. б) и в) сопровождается звуковой сигнализацией и блинкированием цветом соответствующих полей индикации до квитирования этой сигнализации оператором.
Оператор имеет возможность в процессе работы в табличном режиме оперативно изменять параметры конфигурации комплекса, в числе которых: периоды циклической активизации телекоманд, уровень их приоритета, периоды регистрации телеинформации по группам в дисковых диспетчерских журналах, уставки допускового контроля ТИТ, время повторного обращения к неответившему УКП; останавливать или активизировать обслуживание направления, УКП, функции.
3.2. Телесигнализация и телеизмерения в табличном режиме
3.2.1. Путь доступа к информации о группе сигналов:
номер_направления->номер_УКП->телефункция->группа_сигналов.
Для получения информации о состоянии конкретной группы сигналов произведите выбор стрелками или "мышью" нужный объект и сквитируйте его клавишей Enter клавиатуры или левой клавишей "мыши" соответственно. Таким образом производите последовательно выбор для отображения состояния группы сигналов в окнах:
"Направление",
" N | Адрес УКП | Наименование УКП |Тип УКП|Пер.АПУС",
"Функции".
Отображаемая на экране телеинформация оперативно обновляется в темпе ее получения, если события не носят аварийный характер.
3.2.2. В случае аварийных ситуаций: изменения состояний ТС, выход значений ТИТ за уставки допускового контроля и отсутствие ответа от УКП или КЩ, сигнализация производится (немедленно по мере получения сигнала УПУ) на экране монитора в специальных окнах.
Аварийная телесигнализация представляется списком в красном окне в нижней части экрана. В красном окне аварийных ТС указаны номер направления, адрес и наименование УКП, номер, наименование и значение канала ТС. В правой верхней части красного окна индицируются номера направлений, по которым зарегистрированы изменения ТС и указывается количество несквитированных оператором аварийных ТС на текущий момент времени. При просмотре списка аварийных ТС по направлениям используйте клавиши "PgUp", "PgDn".
Аналогично представляется информация о выходе значений ТИТ за пределы уставок допускового контроля. Красное окно аварийных значений ТИТ открывается в верхней части экрана.
Красные окна сохраняются на экране до тех пор, пока оператор не выполнит квитирование всех сообщений. Заложено три уровня квитирования:
1) по клавише "F1" - квитирование всех сообщений;
2) по клавише "F3" - квитирование всех сообщений по текущему направлению;
3) по клавише "F2" - квитирование сообщений по текущему УКП;
4) по клавише "Пробел" - квитирование отдельного сообщения.
Отображение красных окон сопровождается звуковым сигналом, который периодически выдается в течении всего времени нахождения аварийного окна на экране. Нажатием клавиш "ALT-S" можно производить отключение/включение звуковой сигнализации. Нажатием клавиш "ALT-Z" можно квитировать звуковую сигнализацию до следующей аварийной ситуации.
Переход из красного окна ТС в красное окно ТИТ и обратно при их одновременном отображении на экране производите по клавише "Tab". При этом соответственно перемещается курсор квитирования.
3.2.3. Для включения/отключения допускового контроля значений ТИТ (только для УКПМ) выполните в окне функции "Уставки" следующие операции:
1) выберите при помощи стрелок клавиатуры (с фиксацией клавишей ENTER) или "мыши" (с фиксацией положения левой клавишей) в столбце "Контроль" позицию, соответствующую нужному каналу ТИТ. Значение "1" соответствует включению,а "0" - отключению допускового контроля по данному каналу ТИТ;
2) выберите при помощи стрелок клавиатуры (с фиксацией клавишей ENTER) или "мыши" (с фиксацией положения левой клавишей) позиции уставок. Активизированные уставки изменяют цвет фона.
3) Введите при необходимости новые значения уставок. Для этого значения уставки следует набрать на клавиатуре комбинацию "Shift-F1", указать при помощи стрелок клавиатуры или "мыши" уставку и ввести новое значение. После ввода значения и потверждения оператором необходимости изменения программа отправит новые значения уставок в соответствующий УКПМ. На экране появится предупредительное сообщение "Ожидание квитанции ...". После приема квитанции от УКП о смене блока уставок сообщение удаляется, а в дисковом диспетчерском журнале сохраняется информация: номер и наименования направления, адрес и наименование УКП, номер и наименование ТИТ, дата и время регистрации события, старое и новое значения уставок, тип уставки и фамилию оператора;
4) после выдачи УКПМ блока уставок программа осуществляет периодический (с интервалом 1 час при отсутствии дополнительной информации в служебном файле) контроль измененных оператором значений уставок УКПМ. При обнаружении несовпадения принятого от УКПМ блока уставок с хранящимся в дисковом журнале программа переходит в режим регенерации уставок с выдачей символа " R " в правом верхнем углу экрана. Производится попытка автоматического восстановления значений блока уставок. Результат заносится в дисковый журнал и выводится предупредительное сообщение оператору в черном окне "Восстановление уставок" с указанием номера направления, адреса и наименования УКП, номера канала ТИТ.
3.2.4. Оператор имеет возможность оперативного выведения (клавишей F7 выбранного курсором объекта) и повторного введения (клавишей F8) в перечень обслуживаемых:
а) отдельных направлений с полным списком УКП;
б) отдельных УКП с полным списком обслуживаемых функций;
в) отдельных функций выбранного УКП .
Индикация оперативно блокированных объектов (направления, УКП или функции) производится инверсным цветом. Перечисленные действия оператора регистрируются в дисковом журнале оперативных действий оператора.
3.3. Телеуправление в табличном режиме
3.3.1. Выполнение команды ТУ возможно только при установлении для данного объекта номера потверждающего ТС. Эта установка выполняется предварительно при конфигурировании, где можно также указать значение потверждающего ТС, соответствующее состоянию "Объект включен". По умолчанию, после ввода номера потверждающего ТС, это значение принимается равным "1".
3.3.2. Для выдачи команды ТУ необходимо:
а) при помощи стрелок клавиатуры (с фиксацией клавишей Enter клавиатуры) или "мыши" (с фиксацией левой клавишей) выбрать нужный объект по пути:
номер_направления->адрес_УКП->функция ТУ->объект ТУ.
б) нажать клавишу Enter. Программа откроет командное окно с двумя командами: "Включить" и "Отключить". Назначение столбцов в этом окне следующее:
в графе "Посылка" - синим прямоугольником потверждается факт отправки УПУ команды ТУ в адрес УКП;
в графе "Квитанция" - зеленым прямоугольником потверждается получение квитанции от УКП на исполнение этой команды ТУ;
в графе "Подтверж.ТС" - розовым прямоугольником отображается состояние подтверждающего ТС объекта телеуправления.
Положение прямоугольника в последнем столбце зависит от заданного для него значения, соответствующего состоянию объекта "Включено". Например, если в окне ТУ состояние в столбце "Акт." подтверждающего ТС задано значением "0", то при открытии командного окна и фактическом значении данного ТС равном "1" прямоугольник в столбце "Подтверж.ТС" командного окна будет находиться в строке "Отключить" и перейдет в строку "Включить" только при получении от данного УКП сигнала об изменении состояния данного ТС в "0".
В окне ТУ в столбцах "ВКЛ" и "ОТКЛ" фиксируется результат выполнения последней команды ТУ. Если в любом из них находится полный прямоугольник розового цвета, это соответствует тому, что состояние объекта соответствует последней выданной команде. Если же в одной граф, "ВКЛ" или "ОТКЛ", строки данной команды выведено два разноцветных квадрата, а в противоположном - один, это соответствует тому, что на отправленную команду ТУ не получен сигнал потверждения ТС.
3.3.3. После выбора команды "Включить" или "Отключить" в командном окне ТУ программа откроет окно ввода пароля оператора.
ВНИМАНИЕ: Если старт системы производился с ключом /P, то пароль не запрашивается, а используется текущий и команда инициируется сразу после нажатия клавиши Enter или левой клавиши "мыши";
После ввода пароля осуществляется сравнение его с текущим зарегистрированным и только при совпадении команда будет отправлена. При несовпадении выдается предупредительное сообщение "Неверный пароль", и команда ТУ не исполняется. При получении с командой ТУ пароля, отсутствующего в списке паролей, программа выдает на экран сообщение "Данный пароль не зарегистрирован" и команда ТУ не исполняется. Индикация инициированной команды ТУ осуществляется синим прямоугольником в командном окне. Получение квитанции от УКП об исполнении команды ТУ отображается зеленым прямоугольником. Состояние подтверждающего ТС отображается розовым прямоугольником в командном окне ТУ. По паролю в дисковом журнале регистрации команд ТУ фиксируется фамилия оператора, выполнившего команду ТУ (в том числе,если эта команда была выполнена со щита).
3.3.4. Неполучение после переспросов квитанции от УКП на команду ТУ индицируется отсутствием зеленой метки, а получение квитанции с ошибкой формата - мигающей меткой в графе "Квитанция" командного окна ТУ.
3.4. Использование паролей
3.4.1. Программа управления комплексом предполагает фиксирование действий оператора при помощи паролей. Различаются понятия "привилегированного" и "рабочего" паролей. По "рабочему" паролю осуществляется запуск комплекса. Диспетчер, владеющий "рабочим" паролем, имеет возможность в процессе работы изменять оперативные параметры, в числе которых период циклической активизации телекоманды, уровень ее приоритета, период регистрации информации по данной группе телеинформации в дисковом журнале.
При получении "привилегированного" пароля возможно формирование списка рабочих паролей с установлением их соответствия фамилиям операторов. По паролю в дисковом журнале регистрации произведенных команд ТУ регистрируется фамилия оператора, производившего ТУ или смену/установку уставок допускового контроля ТИТ.
Если при запуске программы список рабочих паролей отсутствует (начальная инициализация), доступ к ресурсам программы возможен только по "привилегированному" паролю.
Последовательность действий:
1) после старта программы нажать клавишу F7 на клавиатуре;
2) нажать клавишу F4 ("ВВОД ПАРОЛЯ") на клавиатуре;
3) в ответ на приглашение системы ввести последовательно "привилегированный" пароль. Вводимый пароль не отображается на экране. При идентификации пароля программа расширит номенклатуру приглашений в нижней части экрана. При неверно набранном пароле программа выдает предупредительное сообщение. Возобновить набор пароля возможно после квитирования сообщения путем нажатия любой клавиши;
3) нажать клавишу F2 ("РЕЗЕРВИРОВАНИЕ ПАРОЛЕЙ") на клавиатуре. Программа выводит на экран бланк списка на 10 паролей. Позиционирование строки редактирования - стрелками "ВВЕРХ", "ВНИЗ" клавиатуры. Ввод и редактирование "рабочих" паролей осуществляется после ввода комбинации Shift-F1 (при нажатой клавише Shift нажать клавишу F1). После приема шести символов пароля или клавиши Enter программа переводит курсор в поле ввода фамилии оператора. Введенная строка при подтверждении сохраняется в файле конфигурации системы;
4) нажать клавишу Esc (выход из режима редактирования рабочих паролей);
5) нажать клавишу F3 ("СБРОС ПАРОЛЯ");
6) нажать клавишу F4 ("ВВОД ПАРОЛЯ"). Система готова к приему ("рабочего") пароля оператора. Оператор в ответ на приглашение должен ввести пароль, зарегистрированный под его фамилией в списке паролей. Вводимый пароль не отображается на экране. После идентификации пароля оператора программа предоставляет ему ресурсы комплекса. Последний введенный пароль становится текущим. При каждом ТУ программа запрашивает пароль оператора и идентифицирует его с текущим паролем системы. При несоответствии введенного при ТУ пароля текущему выдается сообщение "Неверный пароль". При получении с командой ТУ пароля, отсутствующего в списке паролей, программа выдает на экран сообщение "Данный пароль не зарегистрирован".
3.5 Печать отчетов
3.5.1. Для получения требуемого документа на экране,на принтере или в файле следует:
1) перейти в табличный режим отображения информации;
2) набрать на клавиатуре комбинацию "Alt - W";
3) в появившемся окне следует ввести номер формы отчета - номер строки файла FORMS.OUT, которая однозначно определяет какие данные и какой форме следует вывести. При отсутствии файла форм будет выведено предупредительное сообщение. Например, для вывода данных по командам ТУ из "малой" и "большой" баз TU_*.DBF в форме, описанной в файле FORMA2.TU, следует в качестве номера формы указать число "6"(смотри текст файла FORMS. OUT, приведенный в п.4.1.). Если файл формы будет найден, то его содержимое будет выведено на экран в виде заложенной в нем "шапки" документа. Кроме этого будут выведены все фильтры, указанные в строке формата @FILDS ... @ENDF;
4) пользователь имеет возможность оперативно менять значения фильтров по всем полям записей данных. Для этого, путем последовательного нажатия клавиши "Tab" следует выбрать поле редактирования. Заложена возможность редактирования полей "шаг", "корреляция" и фильтров по всем столбцам. Выбранное клавишей Таb поле выделяется черным цветом. Для редактирования фильтра столбца следует набрать на клавиатуре комбинацию "Shift - F1", выбрать стрелками нужный столбец, ввести новое значение и нажать клавишу Enter. Для сброса фильтра по выбранному столбцу достаточно нажать клавишу Enter без ввода значения. В ответ на приглашение системы подтвердить ввод значения выбором "ДА" и клавишей Enter.
Если редактирование окончено или оно не требовалось, то после вывода шаблона следует нажать на клавиатуре "F2". В появившемся окне следует выбрать направление вывода: "экран", "принтер", текстовый файл или файл в формате DBF и нажать клавишу "Enter". Программа активизирует файл подготовки документов PRNT. EXE и в случае успешного окончания подготовки выведет документ на указанное устройство. Если же будет обнаружена какая_либо некорректность, программа выведет сообщение "Ошибка при подготовке документа" и код обнаруженной ошибки (таблица соответствия приведена в п.4.1.).
Если ширина документа больше, чем размер окна, то для просмотра всего документа на экране следует использовать клавиши "Влево", "Вправо", "Вверх", "Вниз", "PgUp", "PgDn".
При выводе отчета на печать: если размер документа превышает размер одной страницы текста и печать производится на отдельных листах, программа после вывода очередной страницы ожидает не более 60 с для смены листа печати. При истечении времени ожидания программа выходит из режима вывода документа и готова к приему команды на формирование следующего документа. Если при печати одного документа производится попытка вывода другого документа, программа выводит сообщение об ошибке действий оператора, печать первого документа продолжается.
3.6. Телесигнализация, телеизмерения и телеуправление в графическом режиме
3.6.1. При отображении общей мнемосхемы на экран выводится обобщенная информация по всем обслуживаемым УКП. Каждому условному графическому обозначению (УГО) УКП соответствуют индикаторы аварийных изменений ТС, аварийного выхода значений ТИТ за уставки допускового контроля. Первые два события сопровождаются мерцанием индикаторов УГО и звуковым сигналом ПЭВМ. Индикатор УГО неответившего или приостановлленного УКП подсвечивается заданным цветом. Выбор УКП осуществляется стрелками клавиатуры и фиксируется клавишей Enter, либо, после выбора "мышью", фиксируется правой или левой клавишей "мыши". Левая клавиша "мыши" вызовет вывод мнемосхемы выбранного УКП, правая-графических таблиц значений ТИТ и ТИИ выбранного УКП.
3.6.2. В графическом режиме информация по УКП отображается в виде функциональной мнемосхемы и таблиц ТИТ, ТИИ. Переход между ними осуществляется по клавише F4. Выход в табличный режим-по клавише F5.
3.6.3. Для перехода от одного УКП к другому в пределах одного направления следует вызвать меню УКП: нажать клавишу F7 или перевести указатель "мыши" на подсказку "F7 Окно КП" и нажать левую клавишу. Прокрутка свитка меню производится стрелками "Вверх" и "Вниз" клавиатуры. Наименование текущего УКП выделено в списке инверсным цветом. Выбором при помощи "мыши" или вводом непосредственно на клавиатуре порядкового номера в списке УКП и клавиши Enter производится переход к отображению выбранного УКП. При попытке отображения мнемосхемы, не установленной в системе, производится отображение графических таблиц ТИТ, ТИИ. УКП, на которые в системе установлены мнемосхемы, отмечаются в списке УКП графического режима символом ">".
Для перехода к УКП другого направления следует вызвать меню направлений: нажать клавишу F8 или перевести указатель "мыши" на подсказку "F8 Окно напр" и нажать левую клавишу. Наименование текущего направления выделено в списке инверсным цветом. При помощи "мыши" или набрав непосредственно на клавиатуре порядковый номер направления можно получить меню УКП данного направления. При помощи "мыши" или набрав непосредственно на клавиатуре порядковый номер в списке УКП и Enter производится переход к отображению выбранного УКП.
3.6.4. Если программой зарегистрированы изменения состояний ТС по УКП, не отображаемым в данный момент на экране, информация об этом выводится в левой верхней части экрана и сопровождается звуковой сигнализацией. Информация представляется в виде синего окна с ключевым словом ТС, на котором красным цветом выделены номера направлений, по которым зарегистрированы изменения состояний ТС.
Для перехода на отображение УКП, в котором зарегистрированы изменения состояний ТС, следует навести указатель "мыши" на номер активного направления и нажать левую клавишу "мыши", либо набрать на клавиатуре комбинацию клавиш "Alt-1"..."Alt-4" в соответствии с номером выбранного направления. На экран будет выведен список УКП выбранного направления, имеющих изменения состояний ТС. При помощи "мыши" или набрав непосредственно на клавиатуре порядковый номер в списке УКП и Enter возможен переход к отображению выбранного УКП.
Если программой зарегистрированы выходы значений ТИТ за уставки допускового контроля по УКП, не отображаемым в данный момент на экране, информация об этом выводится в правой верхней части экрана и сопровождается звуковой сигнализацией. Информация представляется в виде синего окна с ключевым словом ТИ, на котором красным цветом выделены номера направлений, по которым зарегистрированы выходы значений ТИТ за уставки допускового контроля.
Для перехода на мнемосхему УКП, в котором зарегистрированы выходы значений ТИТ за уставки допускового контроля, следует навести указатель "мыши" на номер активного направления и нажать левую клавишу "мыши", либо набрать на клавиатуре комбинацию клавиш "Alt-5"..."Alt-8" в соответствии с номером выбранного направления. На экран будет выведен список УКП выбранного направления, имеющих выходы значений ТИТ за уставки допускового контроля. При помощи "мыши" или набрав непосредственно на клавиатуре порядковый номер в списке УКП и Enter возможен переход к отображению мнемосхемы выбранного УКП. Если выбирается УКП с номером, состоящим из двух цифр, переход на выбранное УКП осуществляется после ввода второй цифры без ожидания нажатия клавиши Enter.
Для инициирования команд ОТ и ТСК в режиме отображения мнемосхемы УКП необходимо набрать на клавиатуре комбинации "Alt-O" и "Alt-T" соответственно.
3.6.5. Квитирование сигнализации производится:
по отдельному ТС или ТИТ- переводом указателя "мыши" (либо стрелки-указателя с помощью стрелок клавиатуры) на блинкирующее УГО и нажатием левой клавиши "мыши"(либо нажатием клавиши Enter);
по всем изменениям текущего УКП - нажатием клавиши F2 или переводом указателя "мыши" на подсказку "F2 тек.КП" и нажатием левой клавиши "мыши";
по всем изменениям УКП текущего направления - нажатием клавиши F3 или переводом указателя "мыши" на подсказку "F3 тек.напр" и нажатием левой клавиши "мыши";
по всем изменениям УКП всех направлений - нажатием клавиши F1 или переводом указателя "мыши" на подсказку "F1 всех изм." и нажатием левой клавиши "мыши";
квитирование звуковой сигнализации до следующего аварийного события производится набором клавиш "Alt-Z".
3.6.6. Сигнализация о нарушениях, восстановлении связи с УКП или КЩ и регистрации несанкционированных оператором изменений значений уставок УКП (например, при перерыве электроснабжения УКП) производится в верхней части экрана символами "Н", "В" и "У", соответственно, черного цвета. При выборе меток "Н", "В" и "У" при помощи "мыши", либо набором на клавиатуре комбинации клавиш "Alt-H", "Alt-B", "Alt-U" на экран представляется для квитирования расширенная информация о соответствующем событии. Квитирование производится клавишей F1.
3.6.7. На мнемосхеме УКП может быть представлена вся необходимая информация.
Индикация состояний ТС производится заданными при конфигурировании цветами непосредственно на УГО контролируемых объектов. Изменение состояния ТС сопровождается блинкированием (миганием) поля индикации и звуковой сигнализацией.
Отображение значений ТИТ производится в установленных при конфигурировании позициях. Выход значений ТИТ за уставки допускового контроля сопровождается блинкированием (миганием) поля индикации УГО объекта, красным полем "ТИТ" в правом нижнем углу экрана и звуковой сигнализацией.
Нарушение связи с данным УКП или остановка обслуживания его индицируется красным окном в левом верхнем углу экрана с символом "*". Остановке обслуживания соответствует белый цвет символа, нарушению связи - черный.
Индикация переключения состояния нетелемеханизированного объекта производится выбором его УГО с помощь стрелок клавиатуры и фиксацией клавишей Enter ,либо "мыши" с фиксацией положения левой клавишей.
3.6.8. Телеуправление производится следующим порядком:
а) выберите УГО объекта телеуправления при помощи стрелок клавиатуры или укаазателя "мыши". Если УГО блинкирует по изменению состояния ТС - сквитировать его нажатием клавиши Enter, либо левой клавишей "мыши";
б) нажать клавишу Enter или левую клавишу "мыши". В нижней части экрана выводится синее окно с двумя полями для выбора: "ВКЛ" и "ОТКЛ". Подчеркнутое поле отражает последнюю выполненную команду по данному объекту;
в) при помощи стрелок клавиатуры или "мыши" навести указатель на нужное поле и нажать Enter или левую клавишу "мыши". Программа выводит розовое окно приглашения для ввода пароля оператора;
г) по приглашению ввести на клавиатуре личный пароль оператора и нажать клавишу Enter.
ВНИМАНИЕ: Если старт системы производился с ключом /P, то пароль не запрашивается, а используется текущий и команда инициируется сразу после нажатия клавиши Enter или левой клавиши "мыши";
В поле УГО объекта телеуправления отдельными цветами сигнализируются: выбор объекта управления, факт отправки УКП команды ТУ и получение квитанции от УКП по исполнению команды;
д) для сброса цвета результата выполнения команды ТУ и перехода на контроль состояния подтверждающего ТС при его неизменении (в противном случае - переход автоматически) нужно выбрать УГО контролируемого объекта при помощи "мыши" (или стрелками клавиатуры) и нажать правую клавишу "мыши" (или комбинацию клавиш "Alt-R").
3.6.9. В графических таблицах ТИТ, ТИИ отображены значения ТИТ и ТИИ, приведенные к реальным измеряемым значениям путем умножения на индивидуальные нормирующие коэффициенты ( КОЭФФИЦИЕНТ_ПЕРЕСЧЕТА - указаны в окнах ТИТ и ТИИ табличного режима ). Значения ТИТ и ТИИ отображаются в таблицах в темпе получения информации от УКП.
Выход значений ТИТ за пределы допускового контроля индицируется в тааблицах подсвечиванием значения ТИТ красным цветом. Изменение ТС отображается в виде красного поля "ТС". Значения ТИТ, ТИИ неответивших УКП отмечаются символом "*". Приостановленность функций запроса ТИТ, ТИИ индицируется черным цветом заголовков таблиц ТИТ, ТИИ.
3.7. Диагностика оборудования
3.7.1. Для УКПМ-2 имеется возможность запроса блока внутренней диагностики. Результаты внутренней диагностики регистрируются в журнале ERR. Для активизации функции необходимо нажать комбинацию клавиш "Alt-E" в окне функций УКП. Если УКП не обслуживает эту функцию, выдается сообщение в журнал "Отсутствуие ответа на функцию запрос блока ошибок" с указанием номера направления и адреса УКП. Возможные сообщения представлены в п.5.
4. ВХОДНЫЕ И ВЫХОДНЫЕ ДАННЫЕ
4.1. Ведение дисковых журналов
4.1.1. В процессе работы программа сохраняет текущие данные в дисковых файлах (дисковых журналах) в формате DBF. Регистрация производится с привязкой по времени на УПУ:
а) попыток и результатов выполнения команд ТУ;
б) изменений состояний ТС;
в) выходов за пределы уставок допускового контроля значений ТИТ;
г) значений по каналам ТИТ и ТИИ с установленным периодом регистрации;
д) нарушений/восстановления связи с УКП и КЩ;
е) смены/установки уставок допускового контроля каналов ТИТ УКПМ;
ж) оперативных действий оператора;
з) ошибок оборудования телекомплекса (внутренней диагностики УКП, УПУ и ошибки обработки телеинформации в ПЭВМ).
4.1.2. Периоды регистрации устанавливаются индивидуально по всем каналам ТИ и ТИИ. Необходимым условием ведения баз данных является наличие файла ведения журналов - FILE.FIL в формате ASCII. Файл указаний редактирует пользователь в соответствии со следующим. После ключевого слова (TU, TC, TI, TII, TIA, UST, OP, KP, ERR) должны быть указаны пути и имена файлов баз данных и их информационная емкость. Назначение ключевых слов следующее:
TU - признак файлов базы данных по регистрации команд ТУ;
TC - признак файлов базы данных по регистрации изменений ТС;
TI - признак файлов базы данных по регистрации значений каналов ТИ;
TII - признак файлов базы данных по регистрации значений каналов ТИИ;
TIA - признак файлов базы данных по регистрации выходов за пределы уставок значений ТИТ;
UST - признак файлов базы данных по регистрации изменений уставок допускового контроля ТИТ;
KP - признак файлов базы данных по регистрации нарушения и восстановления связи с УКП;
OP - признак файлов базы данных по регистрации оперативных действий оператора;
ERR - признак файлов базы данных ошибок оборудования телекомплекса.
Пример файла FILE.FIL (число строк файла определяется исходя из необходимости ведения соответствующих журналов): TU TU_SMALL.DBF 50 TU_LARGE.DBF 2500 TC TC_SMALL.DBF 50 TC_LARGE.DBF 2500 TI TI_SMALL.DBF 50 TI_LARGE.DBF 2500 TII TII_SMAL.DBF 50 TII_LARG.DBF 2500 TIA TIA_SMAL.DBF 50 TIA_LARG.DBF 2500 KP KP_SMAL.DBF 20 KP_LARGE.DBF 200 UST UST_SMAL.DBF 10 UST_LARG.DBF 200 OP OP_SMAL.DBF 50 OP_LARG.DBF 500 ERR ERR_SMAL.DBF 5 ERR_LARG.DBF 200
В каждой строке за ключевым словом и разделителем (пробелом) следуют имена двух файлов, условно - "малая" и "большая" базы данных. Имена файлов баз данных могут быть выбраны произвольными. "Малая" база служит для оперативного наполнения и может быть размещена на электронном диске для экономии ресурса "жесткого" диска. Перегрузка данных из "малой" базы в "большую" осуществляется после каждого наполнения "малой" базы. Емкость баз данных задается пользователем произвольно (исходя из размера выделенной памяти на носителе) в этой же строке после соответствующего имени и разделителя-пробела. Единицей измерения емкости служит одна запись данных. "Большая" база организована в виде кольцевого файла, т. е. после ее очередного заполнения данные перекрывают данные, размещенные в начале. ПРЕДУПРЕЖДЕНИЯ:
1. Длина полного имени файла базы данных не долна превышать 45 символов.
2. Емкость "большой" базы должна быть кратна емкости "малой".
Программа формирования выходного документа выбирает данные из "большой" базы, а при ее отсутствии (например, до первого заполнения "малой") из "малой". Если файла указаний нет в текущем каталоге, то при запуске программа выдаст предупредительное сообщение, а при работе ведение баз данных выполняться не будет.
Для получения требуемого документа на экране, принтере или в файле необходимо создать файл форм с именем FORMS.OUT. При отсутствии этого файла в текущем каталоге и попытке получить документ будет выдано предупредительное сообщение и формирование документа не производится.
Формат файла форм рассмотрим на типовом примере.
Содержимое файла FORMS.OUT: @001 FORMA1.TU TU_LARGE.DBF
@002 FORMA1.TC TC_LARGE.DBF @003 FORMA1.TI TI_LARGE.DBF @004 FORMA1.TII TII_LARG.DBF @005 FORMA1.TIA TIA_LARG.DBF @006 FORMA1.BAD KP_LARGE.DBF @007 FORMA1.UST UST_LARG.DBF @008 FORMA1.OP OP_LARG.DBF @009 FORMA1.ERR ERR_LARG.DBF
После ключевого символа '@' без разделителя должен стоять номер строки, являющийся указателем при выборе типа и формы документа. После разделителя указывается имя файла конкретной формы, в котором содержится шаблон для вывода, и далее после разделителя имя файла базы данных, которую нужно вывести.
На один и тот же тип данных может быть создано неограниченное количество конкретных форм.
Рассмотрим формат файла конкретной формы на примере формы журнала регистрации команд телеуправления.
Содержимое файла FORMA1.TU: @PAGE_LENGTH 50 @ENDP @STEP 0 @ENDE @CONNEKT 0 @ENDC @TITLE
Форма 1
УТВЕРЖДАЮ
Руководитель группы сменных диспетчеров __________
"____"__________201 г.
Сменный отчет регистрации ТУ @ENDT @HEAD
+-------------------------------------------------------------+ |Напр|Наименование|Наименование| Фамилия |Опе- |Дата|Время|ТС| | | УКП | объекта ТУ |диспетчера|рация| | | | |----+------------+------------+----------+-----+----+-----+--| @ENDH @SUBSCRIPT +-------------------------------------------------------------+ @ENDS @BOTTOM Сменный диспетчер _________________(..............) @ENDB @PRN_STYLE 27,77 @ENDY @FILDES ,|,FILD1>2/4,|,FILD3/20,|,FILD4/19,|,FILD5/7,|,FILD6/5,|, DATE>2-12-1991/10,|,TIME>1:00:00/8,|,FILD9/2,|, @NAME_DOC A:\AA\BB\CC\file.doc @ENDA @NAME_DBF D:\EE\FF\GG\file.dbf @ENDM @ENDF
В файле формы заложено несколько текстовых блоков, заключенных между ключевыми словами. Рассмотрим каждое из них.
1) @PAGE_LENGTH ... @ENDP - длина страницы выходного документа при выводе его на принтере.
2) @STEP ... @ENDE - шаг выборки записей данных из базы в выходной документ ( в секундах);
3) @CONNEKT ... @ENDC - признак взаимосвязи между фильтрами по дате и по времени в данной форме;
4) @TITLE ... @ENDT - название выходного документа, выводимое один раз на первой странице;
5) @HEAD ... @ENDH - "шапка" страницы документа, формируется на каждой странице при выводе документа на принтер;
6) @SUBSCRIPT ... @ENDS - нижняя часть бланка документа, формируемая в конце каждой страницы при выводе на принтер;
7) @BOTTOM ... @ENDB - нижняя часть документа, формируемая один раз в конце при выводе на принтер;
8) @PRN_STYLE ... @ENDY - установка шрифта принтера: 27,64 - сброс принтера, 14 - двойная ширина символа, 27,77 - шрифт "элита", 15 - сжатый шрифт, 27,83,48 - верхний индекс, 27,83,49 - нижний индекс, 27,45,49 - подчеркивание, 27,69 - выделение, 27,71 - двойной удар, 27,112,49 - пропорциональный, 27,120,49 - NLQ;
9) @FILDES ... @ENDF - формат вывода записи данных;
10) @NAME_DOC A:\AA\BB\CC\file.doc @ENDA - полное имя файла отчета в формате ASCII;
11) @NAME_DBF D:\EE\FF\GG\file.dbf @ENDM - полное имя файла отчета в формате DBF.
На структуре последнего формата остановимся подробнее. Структура формируется из нескольких элементарных блоков. Рассмотрим первый из них - ",|,FILD1>2/4".
Запятые использованы для выделения символьной последовательности, которая подставляется в строку выходного документа в качестве разделителя между столбцами таблицы. Как правило, разделитель в строке формата должен соответствовать разделителю в "шапке" таблицы. Если последовательность разделителя состоит из одного символа, как в указанном примере, то вывод информации в данном столбце будет осуществляться, начиная с крайней левой позиции. Если такой подход не устраивает и информацию желательно выводить в центре столбца, например, то для этого непосредственно за разделителем "|" необходимо указать нужное количество пробелов или иных ASCII - символов.
Например, в нашем случае при заданной ширине столбца 4 символа и желании выводить номер направления, поле которого в базе данных равно 1 позиции, в крайней правой позиции, следует данный блок в строке формата записать так:",| ,FILD1>2/1".
Обратите внимание на изменение ширины столбца!
Кроме того, ширину столбца нельзя задать равной нулю! Если необходимо не выводить какое-либо поле из записи данных, то нужно не указывать имени этого поля в строке формата вообще. При этом, разумеется, нужно удалить соответствующий столбец в "шапке" документа. Если нужно оставить какой-либо столбец просто пустым, то кроме неуказания имени этого поля следует расширить разделитель последующего столбца в требуемой мере. Например, при необходимости оставить пустым первый столбец в нашем случае следует задать строку формата так: ,| |, FILD2/20, . . .
"FILD1" - имя поля в записи файла данных, которое нужно вывести в данном столбце таблицы (в нашем случае, в первый столбец таблицы будет выводится информация из поля записи данных с именем "FILD1"). Имена полей фиксированы на уровне программного формирования базы данных, поэтому пользователь не должен менять эти имена. Если программа формирования выходного документа не найдет в заголовке файла данных какого-либо имени, которое задано ей в строке формата @FILDES . . . @ENDF, то будет выведено предупредительное сообщение (код ошибки - 16) и выходной документ сформирован не будет.
Имена и содержимое полей в записях данных :
Для журналов регистрации команд ТелеУправления (здесь и далее через дробь указана ширина соответствующего поля записи базы данных): FILD1/1- номер направления; FILD2/3 - адрес УКП; FILD3/20 - наименование УКП; FILD4/20 - наименование объекта ТУ; FILD5/15 - фамилия диспетчера; FILD6/5 - операция(ВКЛ, ОТКЛ,ВКЛ-Щ или ОТКЛ-Щ); DATE/8 - дата; TIME/6 - время; FILD9/2 - номер потверждающего ТС. FILD10/9 - квитанция от УКП.
Для журналов регистрации аварийных отклонений по ТС: FILD1/1- номер направления; FILD2/3 - адрес УКП; FILD3/20 - наименование УКП; FILD4/20 - наименование ТC; FILD5/1 - состояние ТС; DATE/8 - дата;
TIME/6 - время; FILD8/5 - номер ТС; FILD9/1 - состояние датчика ТС (0 или 1), соответствующее состоянию ОБЪЕКТ ВКЛЮЧЕН.
Для журналов регистрации аварийных отклонений (допусковый контроль) по ТИТ: FILD1/1- номер направления; FILD2/3 - адрес УКП; FILD3/20 - наименование УКП; FILD4/20 - наименование сигнала ТИТ; FILD5/7 - значение сигнала ТИТ; FILD6/7 - единица измерения; FILD7/8 - признак отклонения; DATE/8 - дата; TIME/6 - время; FILD10/3 - номер аварийного сигнала ТИТ.
Для журналов регистрации измерений по каналам ТИТ: FILD1/1- номер направления; FILD2/3 - адрес УКП; FILD3/20 - наименование УКП; FILD4/20 - наименование сигнала ТИТ; FILD5/7 - значение сигнала ТИТ; FILD6/7 - единица изменения первичного сигнала ТИТ; DATE/8 - дата; TIME/6 - время; FILD9/3 - номер сигнала ТИТ.
Для журналов регистрации измерений по каналам ТИИ: FILD1/1- номер направления; FILD2/3 - адрес УКП; FILD3/20 - наименование УКП; FILD4/20 - наименование ТИИ; FILD5/7 - значение сигнала ТИИ; FILD6/7 - единица изменения первичного сигнала ТИИ; DATE/8 - дата; TIME/6 - время; FILD9/3 - номер сигнала ТИИ.
Для журналов регистрации нарушений/восстановления связи с УКП или КЩ: FILD1/1- номер направления; FILD2/20 - наименование направления; FILD3/3 - адрес УКП; FILD4/20 - наименование УКП или номер КЩ; DATE/8 - дата; TIME/6 - время; FILD7/12 - тип отклонения; FILD8/4 - функция, при выполнении которой зарегистрировано нарушение/восстановление связи с УКП.
Для журналов регистрации изменений уставок допускового контроля ТИТ: FILD1/1 - номер направления; FILD2/20 - наименование направления;
FILD3/3 - адрес УКП; FILD4/20 - наименование УКП; FILD5/3 - номер канала ТИТ; FILD6/20 - наименование сигнала ТИТ; DATE/8 - дата; TIME/6 - время; FILD9/12 - событие; FILD10/15 - фамилия оператора, производившего смену/установку уставок ТИТ; FILD11/7 - старое значение уставки канала ТИТ; FILD12/7 - новое значение уставки канала ТИТ; FILD13/8 - тип уставки (аварийная, предупредительная или скорости изменения).
Для журналов регистрации оперативных действий оператора: FILD1/1- номер направления; FILD2/3 - адрес УКП; FILD3/20 - наименование УКП; FILD4/6 - наименование телефункции; FILD5/12 - регистрируемый параметр; FILD6/5 - значение контролируемого параметра на момент изменения; FILD7/5 - изменившееся значение контролируемого параметра; FILD8/15 - фамилия оператора, производившего изменение параметра; DATE/8 - дата; TIME/6 - время.
Для журналов регистрации ошибок оборудования телекомплекса: FILD1/65 - характеристика аварийного события; DATE/8 - дата; TIME/6 - время.
После имени поля следует необязательная последовательность фильтра со знаком сравнения, определящим режим фильтрации. В качестве знака сравнения могут быть использованы символы "=", ">", "<".
При наличии фильтра указание знака сравнения обязательно!
Программа формирования выходного документа пропускает только те записи, которые удовлетворяют условиям фильтрации. В нашем примере, для столбца "Направление" при заданном фильтре ">2" в выходной документ попадут только те команда ТУ, которые были отправлены по 3-ему и 4-ому направлениям, при том условии, конечно, что по остальным полям записи фильтрация будет преодолена успешно.
Следующая часть блока - ширина столбца, которая задается после разделителя "/". Если задана ширина столбца большая, чем ширина поля в записи файла данных, то остаток заполняется пробелами, если наоборот, то информация обрезается по ширине столбца.
Особым образом производится фильтраация по полям (столбцаам) даты ("DATE") и времени ("TIME"). Фильтры этих полей предназначены для выборки записей из базы данных по временным параметрам. Помимо сравнения по указанным фильтрам, для полей даты и времени имеет значение также признак их взаимосвязи, задаваемый в ключевом блоке @CONNEKT . @ENDC и имеющий значения есть/нет. При наличии взаимосвязи даты и времени при фильтрации сообщений программа рассматривает события относительно единственной временной отметки. Так, при наличии взаимосвязи и значениях фильтров по DATE ">22-6-1992" и TIME ">15:00" в отчет попадут события, произошедшие после 15 часов 22 июня 1992 года. В этом случае, отметим, знак фильтра по времени не обрабатывается. Еслли признак взаимосвязи не установлен и при тех же значениях фильтров в выходной документ попадут события, которые былли зафиксированы с 15 до 00 часов каждые сутки послле 22 июня 1992 года. Принцип фильтрации выводимых данных по дате/времени приведен в таблице.
Таблица 1
+-------------------------------------------------------------------+ | | Запись | Запись | | |Отношение | фильтра| фильтра | Фильтрация | |D и Т | даты D |времени Т| | |----------+--------+---------+-------------------------------------| | есть | нет | нет | отсутствует | |----------+--------+---------+-------------------------------------| | есть | *D1) | нет | отсутствует | |----------+--------+---------+-------------------------------------| | есть | =D | =T | производится, вывод одного значения | | | | | с временем равным или минимально | | | | | предшествующим ему в пределах STEP | | | | | Интервал: D(T...T-STEP) | |----------+--------+---------+-------------------------------------| | есть | нет | =T | то же, значение даты - дата послед- | | | | | ней записи | | | | | Интервал: ENDDAY(T...T-STEP) | |----------+--------+---------+-------------------------------------| | есть | нет | <T | производится, вывод всех значений, | | | | | предшествующих указанному времени | | | | | на дату последней записи с учетом | | | | | STEP | | | | | Интервал: начало журнала...ENDDAY(T)| |----------+--------+---------+-------------------------------------| | есть | нет | >T | производится, вывод всех значений, | | | | | последующих за указанным временем | | | | | на дату последней записи с учетом | | | | | STEP | | | | | Интервал: ENDDAY(T)...конец журнала | |----------+--------+---------+-------------------------------------| | есть | <D | *T | производится, вывод всех значений, | | | | | предшествующих указанному времени | | | | | Интервал: начало журнала(интервал T)| | | | | ...D(интервал T) | +-------------------------------------------------------------------+ ---------------
1) "*" - любой из символов из ряда ">", "<" или "=".
Продолжение таблицы 1 +-------------------------------------------------------------------+ | | Запись | Запись | | |Отношение | фильтра| фильтра | Фильтрация | |D и Т | даты D |времени Т| | |----------+--------+---------+-------------------------------------| | есть | >D | *T | производится, вывод всех значений, | | | | | последующих за указанным временем | | | | | Интервал: D(интервал T)...конец | | | | | журнала(интервал T) | |----------+--------+---------+-------------------------------------| | нет | нет | нет | отсутствует | |----------+--------+---------+-------------------------------------| | нет | *D | =T | производится, вывод одного значения | | | | | по всем указанным датам со временем,| | | | | равным или минимально предшествующим| | | | | в пределах STEP указанному | | | | | Интервал T: T-STEP...T | |----------+--------+---------+-------------------------------------| | нет | *D | <T | производится, вывод всех значений | | | | | по всем указанным датам со временем,| | | | | предшествующим указанному с учетом | | | | | STEP | | | | | Интервал T: 00:00.00...T | |----------+--------+---------+-------------------------------------| | нет | *D | >T | производится, вывод всех значений, | | | | | по всем датам, последующим за ука- | | | | | занным временем c учетом STEP до | | | | | 24 часов | | | | | Интервал T: T...23:59.59 | |----------+--------+---------+-------------------------------------| | нет | *D | нет | производится, вывод всех значений, | | | | | по всем указанным датам | | | | | Интервал T: 00:00.00...23:59:59 | |----------+--------+---------+-------------------------------------| | нет | =D | *Т | производится, вывод всех значений | | | | | в соответствии с отношением времени | | | | | по указанной дате | | | | | Интервал: D(интервал T) | |----------+--------+---------+-------------------------------------| | нет | <D | *Т | производится, вывод всех значений | | | | | в соответствии с отношением времени | | | | | по датам, предшествующим указанной | | | | | Интервал: начало журнала(интервал T)| | | | | ...D(интервал T) | |----------+--------+---------+-------------------------------------| | нет | >D | *Т | производится, вывод одного значения | | | | | в соответствии с отношением времени | | | | | по датам, последующим указанной | | | | | Интервал: D(интервал T)... | | | | | ...конец журнала(интервал T) | +-------------------------------------------------------------------+
В любом случае, если значений не находится в указанном интервале фильтра, выводится пустая запись. Вводить фильтр по дате следует в формате: ЧЧ-ММ-ГГГГ (число-месяц-год), фильтр по времени - в формате: ЧЧ:ММ:СС (часы:минуты:секунды).
Контроль введенных оператором фильтров на достоверность не производится !
Последовательность расположения ключевых блоков в файле не имеет значения, но при отсутствии некоторых из них программа выдаст предупредительное сообщение с кодом ошибки = 5 (Синтактическая ошибка в файле конкретной форме). Также программа поступит при обнаружении некорректно сформированных ключевых блоков. Это не относится к блокам @STEP ... @ENDE, @CONNEKT ... @ENDC, @PAGE_LENGTH ... @ENDP.
Если эти блоки не указаны или указаны некорректно, то первым двум присваивается значение = 0, а длине странице - 60 строк.
В случае невозможности подготовки документа программа выдает на экран сообщение об ошибки при формировании документа и код этой ошибки.
Соответствие ошибочных обрабатываемых ситуаций и кодов следующее:
//1 - ошибка открытия файла форм;
//2 - синтаксическая ошибка или отсутствие требуемого указателя в файле форм;
//3 - ошибка открытия файла конкретной формы;
//4 - ошибка в задании ширины столбца выходного документа(=0);
//5 - синтаксическая ошибка в файле конкретной формы (возможно, нет одного из ключевых слов);
//6 - ошибка выделения динамической памяти;
//7 - ошибка в формировании страницы выходного файла- документа;
//8 - файл данных пуст;
//9 - ошибка входных параметров;
//10 - ошибка открытия файла указаний;
//11 - не найдено имя "большого" файла в файле указаний при ошибке открытия "большого" файла;
//12 - ошибка открытия и большого, и малого файлов данных;
//13 - первый байт открытого файла данных не соответствует первому байту файлов, формируемыми в формате dBASE;
//14 - файл данных не содержит записей;
//15 - длина файла данных не соответствует имеющимся в нем параметрам;
//16 - в файле данных нет поля с именем, заданным в строке формата файла формы;
//17 - кол-во столбцов в вых. документе превышает предельное(75);
//18 - длина стpоки выходного документа превысило предельную(512);
//19 - ошибка открытия файла выходного документа;
//20 - ошибка длины файла форм;
//21 - ошибка "открытия" файла "малой" базы данных;
//22 - ошибка записи на выходное устройство.
4.2. Трансляция исходного текста описателя конфигурации
4.2.1. Программа трансляции (далее - транслятор) CNF_105 обеспечивает трансляцию ASCII-файла данных конфигурации телекомплекса во внутренние форматы файлов системы.
4.2.2. Рабочий модуль транслятора - CNF_105.EXE. Выходные файлы транслятора использует модуль управления телекомплексом KOMPAS15.EXE. На первом проходе преобразования транслятор создает временные файлы с расширением "()" . Если в процессе трансляции ошибок не обнаружено, то транслятор переименовывает файлы *.() в *.FI с удалением "старых". Также создаются файлы с расширением *.PU. Если же в исходном файле конфигурации обнаружена ошибка, то временные файлы удаляются из текущего каталога, а сообщение с указанием кода ошибки выводится на экран.
4.2.3. Имя файла конфигурации может быть любым, если оно задается в командной строке при запуске транслятора. Например:
А>CNF_105 NAME.CNF<Enter>
4.2.4. Если же транслятор запускается без указания имени файла конфигурации, то начинается обработка файла с именем KOMPASTM.CNF. Исходный файл конфигурации представляет собой ASCII-файл, сформированный в любом текстовом редакторе с соблюдением нижеприведенных правил.
4.2.5. Файл конфигурации строится по блочному принципу. Блок - это совокупность текстовых строк (тело блока), заключенных между метками начала и конца блока, содержащими ключ @ и имя_блока. Структура файла конфигурации повторяет структуру телекомплекса: тело блока описания направления включает блоки описания УКП, последние включают идентификаторы сигналов. В общем виде структура телекомплекса: @DIREC1...(тело блока описания направления)...@END_DIREC1, @DIREC2...(тело блока описания направления)...@END_DIREC2, @DIREC3...(тело блока описания направления)...@END_DIREC3, @DIREC4...(тело блока описания направления)...@END_DIREC4.
4.2.6. Пары меток ограничивают описание конфигурации по всем УКП соответствующего направления. Между концом предыдущего блока и началом последующего допускается занесение необходимых комментариев.
4.2.7. Порядок следования блоков одного уровня может быть любым. Пересечения тел блоков одного уровня недопустимы. Первая непустая строка после сообщения типа @DIRECn интерпретируется как наименование направления. Транслятор принимает первые 20 символов строки наименования направления. Тело блока описания направления должно содержать тела блоков описания всех УКП, установленных на данном направлении (не более 32-х УКП на одном направлении):
@KP...(тело блока описания УКП)...@END_KP.
4.2.8. В общем виде структура файла описания конфигурации может быть представлена в следующем виде: @DIREC1 НАИМЕНОВАНИЕ ПЕРВОГО НАПРАВЛЕНИЯ @KP (тело блока описания УКП) @END_KP @KP (тело блока описания УКП) @END_KP . . . . . . @END_DIREC1 @DIREC2 НАИМЕНОВАНИЕ ВТОРОГО НАПРАВЛЕНИЯ @KP (тело блока описания УКП) @END_KP @KP (тело блока описания УКП) @END_KP . . . . . @END_DIREC2 . . . . . .
4.2.9. Тело блока описания УКП в свою очередь содержит идентификаторы ТС, ТИ, ТИИ, УСТ, ТУ, ОТ и ТСА. Первая непустая строка после ключевого слова "@KP" рассматривается как идентификатор данного УКП в следующем формате:
Адрес_КП\Наименование_КП\Тип_УКП\Время_АПУС
Адрес_КП должен быть представлен шестнадцатиричным числом в диапазоне от 0 до 3FH. Максимальная длина поля Наименование_КП - 20 символов. Тип_УКП может принимать значения: 1 для УП-КП.М из состава ТМ-120-1.М и 0 для УКПМ из состава УВТК 120.2. Под временем_АПУС понимается интервал очередной попытки установления связи с УКП после определения его неисправности. Время_АПУС задается в секундах, диапазон: от 1 до 65500 секунд.
Для ограничения блоков описания сигналов ТС, ТИ, УСТ, ТИИ и ТУ следует использовать соответствующие метки: @_TC ... (идентификатор ТС) ... @_END_TC, @_TI ... (идентификатор ТИТ) ... @_END_TI, @TII ... (идентификатор ТИИ) ... @END_TII, @UST ... (идентификатор УСТ) ... @END_UST, @TU ... (идентификатор ТУ) ... @END_TU.
Для задания команд ОТ и ТСА: @OT ... (идентификатор ОТ) ... @END_OT, @TCA ... (идентификатор ТСА) ... @END_TCA.
Внутри этих ключевых блоков не должно быть строк, не относящихся к описанию телеинформации. В общем виде тело блока описания УКП может быть представлено в следующем виде: @KP ИДЕНТИФИКАТОР_УКП @_TC (идентификатор ТС1) . . . (идентификатор ТСn) @_END_TC @_TI (идентификатор ТИТ1) . . . (идентификатор ТИТn) @_END_TI @UST (уставки ТИТ1) . . . (уставки ТИТn) @END_UST @TII (идентификатор ТИИ1) . . . (идентификатор ТИИn) @END_TII @TU (идентификатор ТУ1) . . . (идентификатор ТУn)
@END_TU @OT (идентификатор ОТ) @END_OT @TCA (идентификатор ТСА) @END_TCA @END_KP
4.2.10. Формат идентификатора ТС следующий:
НОМЕР_ТС\НАИМЕНОВАНИЕ_ТС\АКТ_СОСТОЯНИЕ_ТС
НОМЕР_ТС задается десятичным числом от 1 до 64 для УКПМ и от 1 до 48 для УП-КП.М. Максимальная длина поля НАИМЕНОВАНИЕ_ТС - 20 ASCII-символов. АКТ_СОСТОЯНИЕ_ТС - число 0 или 1, состояние канала ТС, соответствующее состоянию ОБЪЕКТ ВКЛЮЧЕН.
4.2.11. Формат идентификатора ТИТ следующий: НОМЕР_ТИТ\НАИМЕНОВАНИЕ_ТИТ\ТИП_ИЗМЕРИТЕЛЬНОГО_ТРАНСФОРМАТОРА\ЕДИНИЦА_ ИЗМЕРЕНИЯ\КОЭФФИЦИЕНТ_ПЕРЕСЧЕТА\ПЕРИОД_РЕГИСТРАЦИИ\ПРИОРИТЕТ\ПЕРИОД_А КТИВИЗАЦИИ
Описания полей:
НОМЕР_ТИТ - 3 символа из ряда 1.1 ... 1.8, 2.1 ... 2.8 (группа.номер_в_группе), НАИМЕНОВАНИЕ_ТИТ - 20 символов (текст), ТИП_ИЗМЕРИТЕЛЬНОГО_ ТРАНСФОРМАТОРА - 8 символов (текст), ЕДИНИЦА ИЗМЕРЕНИЯ - 7 символов (текст), КОЭФФИЦИЕНТ_ПЕРЕСЧЕТА - десятичное число - 6 знаков с точкой, ПЕРИОД РЕГИСТРАЦИИ - десятичное число от 1 до 65500 (с), ПРИОРИТЕТ - десятичное число от 1 до 250, ПЕРИОД АКТИВИЗАЦИИ - десятичное число от 1 до 65500 (с).
4.2.12. Формат идентификатора УСТ следующий: НОМЕР_ТИТ\БАЙТ-УКАЗАТЕЛЬ_АКТИВИЗИРУЕМЫХ_УСТАВОК\УСТАВКА_1\...\УСТА ВКА_N\ПЕРИОД_АКТИВИЗАЦИИ_ФУНКЦИИ_КОНТРОЛЯ_УСТАВОК\ПРИОРИТЕТ_ФУНКЦИИ_К ОНТРОЛЯ_УСТА ВОК
Описания полей:
НОМЕР_ТИТ - 3 символа из ряда 1.1 ... 1.8, 2.1 ... 2.8 (группа.номер_в_группе), БАЙТ-УКАЗАТЕЛЬ_АКТИВИЗИРУЕМЫХ_УСТАВОК - шестнадцатиричное значение байта (диапазон от 1 до FF) флагов активизируемых уставок. Каждому биту байта-указателя соответствует определенная уставка.
Верхняя уставка уровня 1 - 10000000B (80H);
Нижняя уставка уровня 1 - 01000000B (40H);
Верхняя уставка уровня 2 - 00100000B (20H);
Нижняя уставка уровня 2 - 00010000B (10H);
Верхняя уставка уровня 3 - 00001000B (08H);
Нижняя уставка уровня 3 - 00000100B (04H);
Уставка скорости 1 - 00000010B (02H);
Уставка скорости 2 - 00000001B (01H).
При задании нескольких уставок соответствующие разряды байта-указателя суммируются "по схеме ИЛИ". Например, коду C1 соответствует активизация уставок: верхней и нижней уставок уровня 1, уставки скорости 2;
УСТАВКА_1\...\УСТАВКА_N - список приведенных (к первичным) значений уставок в формате до 6-ти десятичных знаков с точкой. Порядок следования значений уставок должен соответствовать активизированным разрядам байта-указателя, начиная со старшего.
ПЕРИОД_АКТИВИЗАЦИИ_ФУНКЦИИ_КОНТРОЛЯ_УСТАВОК - десятичное число от 1 до 65500 (с).
ПРИОРИТЕТ_ФУНКЦИИ_КОНТРОЛЯ_УСТАВОК - десятичное число от 1 до 250.
Пример: @UST 1.2\C1\12345.6\2345.6\34.56\1200\100 @END_UST
В данном примере по каналу 1.2 ТИТ активизируются при запуске программы уставки:
верхняя уставка уровня 1 со значением 12345.6 единиц измерения по данному каналу;
нижняя уставка уровня 1 со значением 2345.6 единиц измерения по данному каналу;
уставка скорости 2 со значением 34.56 единиц измерения за 300 мс (период цикла измерения каналов ТИТ) по данному каналу.
Через каждые 1200 секунд с приоритетом 100 активизируется функция контроля уставок по этому каналу ТИТ.
4.2.13. Формат идентификатора ТИИ следующий: НОМЕР_ТИИ\НАИМЕНОВАНИЕ_ТИИ\ЕДИНИЦА_ИЗМЕРЕНИЯ\КОЭФФИЦИЕНТ_ПЕРЕСЧЕТА\ПЕ РИОД_РЕГИСТРАЦИИ\ПРИОРИТЕТ\ПЕРИОД_АКТИВИЗАЦИИ
Формат полей идентификатора ТИИ аналогичен формату полей идентификатора команды ТИТ. Номер канала ТИИ - число от 1 до 8.
4.2.14. Формат идентификатора ТУ следующий:
НОМЕР_ТУ\НАИМЕНОВАНИЕ_ТУ\НОМЕР_ПОТВЕРЖДАЮЩЕГО_ТС\СОСТОЯНИЕ_ ПОДТВЕРЖДАЮЩЕГО_ТС
Номер ТУ задается в формате: НОМЕР_ГРУППЫ_НОМЕР_ОБЪЕКТА, из ряда: 11 ... 18, 21 ... 28, 31 ... 38, 41 ... 48 для УКПМ и из ряда: 11 ... 18, 21 ... 28 для УП-КП.М.
Номер потверждающего ТС - десятичное число от 1 до 64 для УКПМ и от 1 до 48 для УП-КП.М. Состояние потверждающего ТС, соответствующее положению "ОБЪЕКТ ТУ ВКЛЮЧЕН", может быть задано значением 0 или 1.
4.2.15. Формат идентификаторов ОТ и ТСА следующий:
ПРИОРИТЕТ\ПЕРИОД_АКТИВИЗАЦИИ.
ПРИОРИТЕТ - десятичное число от 1 до 250, ПЕРИОД АКТИВИЗАЦИИ - десятичное число от 1 до 65500 (с).
4.2.16. Пример файла конфигурации - файл KOMPASTM.CNF.
4.2.17. Дополнительно, в файле конфигурации можно указать общее наименование телекомплекса в формате: @LABEL ...(наименование телекомплекса - до 40 ASCII-символов)... @END_LABEL. Блок LABEL может быть расположен между любыми блоками файла. Между любыми блоками допускается ввод комментариев.
4.2.18.Некоторые особенности конфигурирования с использованием транслятора CNF_105.EXE.
4.2.18.1. Вводится возможность отображения состояния связи с КП на щит.Для этого необходимо в строке описания КП после периода АПУС следует указать количество и адреса отображений изменения связи с КП.Под изменением понимаем пропадание или восстановление связи с КП.Например:
@KP 3F\СЕВЕРНАЯ ТЭЦ\0\120\2\1-1-1-25\4-7-2-28 ...
Согласно данной записи пропадание или восстановление связи с КП с адресом 3FH будет отображаться на двух индикаторах щита,первый из которых с номером 25 обслуживается БУЩ N 1,а второй с номером 392 - БУЩ N 4. Указание этих данных не является обязательным.
4.2.18.2. Водится возможность отображения ТС на щит.Для этого в строке описания ТС после обязательного в этом случае указания логического соответствия ТС следует занести количество и адреса отображений.Например:
@_TC 21\21 ТЕЛЕСИГНАЛ\1\1\2-1-1-21 ...
Согласно данному указанию изменение 21 ТС в данном КП будет отображаться на одном индикатoре щита с номером 21,который обслуживается БУЩ N 2.Допускается отображение одного ТС максимум на 8 индикаторов каждого БУЩ,включенного в конфигурацию.Т.е. при максимальном количестве БУЩ в конфигурации равным 8 один ТС может отображаться на 64 индикатора.Если нет необходимости отображения ТС на щите,то следует просто не указывать дополнительные данные в этой строке описания.
4.2.18.3.Вводится возможность назначения об'екту ТУ ключа щита,при помощи которого может быть выполнено включение или отключение данного об'екта.Для этого в строке описания об'екта ТУ следует указать номер ячейки и номер БУЩ,которые назначаются управляющими для данного об'екта ТУ.Указание логического соответствия подтверждающего ТС состоянию об'екта "ВКЛ" при этом является обязательным.Например:
@TU 11\ПЕРВЫЙ ОБ'ЕКТ ТУ\1\3-7-2-28 ...
Согласно данному указанию первый об'ект первой группы ТУ данного КП будет управляться ключом ячейки с номером 392 в БУЩ N 3.При этом установлено,что об'ект ТУ может управляться только одним ключом,и поэтому в качестве адреса ячейки и БУЩ принимаются первые два поля после поля логического соответствия.Если управление данного об'екта не планируется со щита,то следует просто не указывать адрес ячейки в строке описания.
.Вводится новый блок для назначения общих ключей конфигурации.Пример:
@TOTAL 1\1-1-2-28 2\1-1-2-27 3\1-1-2-26 4\1-1-2-25\4\1-1-1-14\1-1-1-15\1-1-1-16\1-1-1-17 4\4-7-2-28\5\4-1-1-8\4-1-1-9\4-1-1-10\4-1-1-11\4-1-1-12 14\1-1-2-26 15\8\15 @END_TOTAL.
Формат строки - номер(тип) общего ключа\номер БУЩ(1..8)-номер_МИТС(1...7)-номер_раз'ема(1...2)-номер ячейки(1...28).
Тип 1 - "ТУ исполнить",
Тип 2 - "квитирование звуковой сигнализации",
Тип 3 - "квитирование световой сигнализации",
Тип 4 - "ключ группового контроля", после указания номера ключа группового контроля следует указать количество и номера индикаторов,которые образуют данную группу,
Тип 13 - "ячейка сигнализации отсутствия обращений АБПУ в БУЩ",
Тип 14 - "ячейка общей световой сигнализации несоответстивя на щите",
Тип 15 - служебное слово:
первый байт - кол-во предупредительных мерцаний индикатора щита при изменении ТС(от 1 до 8).
второй байт - емкость очереди заготовок ТУ(если 0,не ограничивается)
Согласно данным примера в качестве ключа(кнопки) для выполнения команд ТУ назначен ключ с номером 56 в БУЩ c N 1.
В качестве ключа квитирования звуковой сигнализации назначен ключ(кнопка) с номером 55 в БУЩ c N 1.
В качестве ключа квитирования световой сигнализации назначен ключ(кнопка) с номером 54 в БУЩ c N 1.
В качестве ключей включения группового контроля назначены ключи(кнопки) с номерами 53 в БУЩ c N 1 и 392 в БУЩ c N 4.При этом при активизации первого из них в режим контроля индикаторов переводится четыре ячейки в БУЩ с номером 1 - 14,15,16,17.При активизации второго - 5 ячеек в БУЩ с N4 - 8,9,10,11,12.Количество индикаторов в группе не должно превышать 255.
В качестве ячейки общей световой сигнализации несоответствия на щите назначена ячейка с номером 54 в БУЩ c N 1. Значение первого байта при указании служебного слова рассматривается сиcтемой как количество обязательных мерцаний индикатора при изменении ТС,в течении которых изменение нельзя сквитировать ключом общей световой сигнализации.В нашем случае это число равно максимальному,то есть 8. Значение второго байта используется для ограничения очереди заготовок ТУ на щите.Если это значение задано равным 0,то это означает,что очередь не ограничивается и при нажатии ключа "ТУ исполнить" будет предпринята попытка отправить в ПУ все команды ТУ,набранные на щите к этому моменту.И тогда количество принятых заготовок будет определяться только емкостью резервной зоны в массиве заданий в памяти ПУ. По умолчанию эта зона устанавливается равной 24 записям.Для изменения этого значения предусмотрен ключ /Е в командной строке при запуске программы транслятора:
>CNF_105 UNION.CNF /e32
Номеру БУЩ от 1 до 8 соответствует физический адрес контроллера щита от 0 до 7!
4.2.18.5.Вводятся новые блоки для назначения конфигурации для контроллеров щита(КЩ).
Первый массив конфигурации для КЩ - массив задействованности - формируется автоматически на основании учета ячеек,которые указываются в блоках @TOTAL,@KP,@_TC,@TU.
Второй массив конфигурации КЩ - массив соответствия значений ТС состоянию "ОТКЛ". Для указания данных этого массива следует в любом месте файла конфигурации сформировать блок описания.Например,для БУЩ с номерами 1 и 4 они могут выглядеть следующим образом:
@TC_OFF1 1\F1\E0\D0\C0\B0\A0\97 2\F1\E0\D0\C0\B0\A0\97 3\F1\E0\D0\C0\B0\A0\97 4\F1\E0\D0\C0\B0\A0\97 @END_TC_OFF1
@TC_OFF4 4\01\1\2\4\8\С0\70 5\01\1\2\4\8\С0\70 6\01\1\2\4\8\С0\70 7\01\1\2\4\8\С0\70 @END_TC_OFF4
Формат: номер МИТС (от 1 до 7)\первый байт\второй\...\седьмой. Младший бит байта в строке описания МИТС соответствует 1,57,113,169... ячейке КЩ,старший бит седьмого - 56,112,168,... Т.о. байт описания представляет собой позиционный код определения для группы из восьми ячеек МИТС(1...8,9...16 и т.д.).В нашем примере значение второго байта 1-ого МИТС,равное E0,означает что для 14,15 и 16 ячейки МИТС значение ТС,соответствующее состоянию "ОТКЛ",принимается равным 1,а для 9,10,11,12 и 13 ячеек - 0. При отсутствии блока описания TC_OFFi или отсутствии описания какого-либо МИТС в данном КЩ эти значения принимаются равными 0.
Третий массив конфигурации КЩ - массив соответствия положения ключей состоянию "ОТКЛ". Для указания данных этого массива следует в любом месте файла конфигурации сформировать блок описания.Например,для БУЩ с номерами 1 и 4 они могут выглядеть следующим образом:
@KEY_OF1 1\1\FF\D0\C0\B0\A0\97 2\1\FF\D0\C0\B0\A0\97 3\1\FF\D0\C0\B0\A0\97 4\1\FF\D0\C0\B0\A0\97 @END_KEY_OF1
@KEY_OF4 4\01\1\2\4\8\С0\70 5\01\1\2\4\8\С0\70 6\01\1\2\4\8\С0\70 7\01\1\2\4\8\С0\70 @END_KEY_OF4
Формат: номер МИТС(от 1 до 7)\первый байт\второй\...\седьмой. Младший бит первого байта строки описания МИТС соответствует 1,57,113,169... ячейке КЩ,старший бит седьмого - 56,112,168,... При отсутствии блока описания TC_OFFi или отсутствии описания какого-либо МИТС в данном КЩ эти значения принимаются равными 1.
Четвертый массив конфигурации КЩ - массив задания типа ячеек,=0 - ячейка имеет только индикатор,=1 - ячейка имеет и индикатор,и поворотный ключ.
@TYPE_K1 1\11\22\33\44\55\66\77 2\11\22\33\44\55\66\77 3\11\22\33\44\55\66\77 4\11\22\33\44\55\66\77 @END_TYPE_K1
Формат аналогичен вышеописанным массивам. При отсутствии блока описания TC_OFFi или отсутствии описания какого-либо МИТС в данном КЩ эти значения принимаются равными 1.
Пятый массив конфигурации КЩ - блок задания аттрибутов. Формат: номер аттрибута\период горения(сек)\период гашения(сек).Значение аттрибута равное 255/0 соответствует ровному свечению индикатора ячейки,0/255 - погашенному индикатору,остальные варианты - различным режимам мерцания.При отсутствии блока описания аттрибутов значения устанавливаются по умолчанию (приведены ниже).В описании блока можно указывать значения только тех аттрибутов,которые требуется сделать отличными от значений по умолчанию.
@ATTR_K1 01\0\0 - КЛЮЧ В СООТВЕТСТВИИ; 02\3\3 - НАЧАЛЬНОЕ НЕСООТВЕТСТВИЕ КЛЮЧА(ПРИ СТАРТЕ КЩ); 03\10\10 - ИЗМЕНЕНИЕ ТС; 04\5\5 - ТС ГОТОВ К ОБЩЕМУ СВЕТОВОМУ КВИТИРОВАНИЮ; 05\5\15 - КРАТКОДЕЙСТВУЮЩАЯ ТЕЛЕСИГНАЛИЗАЦИЯ; 06\255\0 - ОБЩИЙ КЛЮЧ НАЖАТ(В Т.Ч. КЛЮЧ ГРУППОВОГО КОНТРОЛЯ); 07\255\0 - ЗАГОТОВКА ТУ(ПРИНУДИТЕЛЬНОЕ ПРИВЕДЕНИЕ КЛЮЧА В НЕСООТВЕТСТВИЕ); 08\255\0 - ТУ ЗАЩЕЛКНУТО ПО КОМАНДЕ "ТУ ИСПОЛНИТЬ"; 09\0\0 - ЗАГОТОВКА ТУ ПЕРЕДАНА В ПУ; 10\0\0 - ЗАГОТОВКА ТУ ПРИНЯТА ПУНКТОМ УПРАВЛЕНИЯ; 11\7\7 - ЗАГОТОВКА ТУ НЕ ПРИНЯТА ПУНКТОМ ТЕЛЕУПРАВЛЕНИЯ(КЛЮЧ НЕ УЧАСТВУЕТ В ФОРМИРОВАНИИ ТУ); 12\15\15 - КВИТАНЦИЯ ПУ "ТУ ВЫПОЛНЕНО - ЕСТЬ КВИТАНЦИЯ ОТ КП"; 13\6\16 - КВИТАНЦИЯ ПУ "НА КОМАНДУ ТУ НЕТ КВИТАНЦИИ КП"; 14\255\0 - ИЗМЕНЕНИЕ ТЕЛЕСИГНАЛИЗАЦИИ СКИТИРОВАНО ОБЩИМ КЛЮЧОМ; 15\2\2 - ЗВУК; 16\255\0 - ОТОБРАЖЕНИЕ В РЕЖИМЕ ГРУППОВОГО КОНТРОЛЯ; 17\10\10 - ПРОПАДАНИЕ/ВОССТАНОВЛЕНИЕ СВЯЗИ С КП; 18\5\5 - ИЗМЕНЕНИЕ СВЯЗИ С КП ГОТОВО К ОБЩЕМУ СВЕТОВОМУ КВИТИРОВАНИЮ; 19\255\0 - ПРОПАДАНИЕ СВЯЗИ С КП СКВИТИРОВАНО ОБЩИМ КЛЮЧОМ; 20\0\0 - ВОССТАНOВЛЕНИЕ СВЯЗИ С КП СКВИТИРОВАНО ОБЩИМ КЛЮЧОМ; 21\255\0 - ОТСУТСТВИЕ СВЯЗИ БУЩ С АБПУ; 22\0\0 - РЕЗЕРВ; 23\0\0 - РЕЗЕРВ;
24\0\0 - РЕЗЕРВ; 25\0\0 - РЕЗЕРВ; 26\0\0 - РЕЗЕРВ; 27\0\0 - РЕЗЕРВ; 28\0\0 - РЕЗЕРВ; 29\0\0 - РЕЗЕРВ; 30\0\0 - РЕЗЕРВ; 31\0\0 - РЕЗЕРВ; 32\0\0 - РЕЗЕРВ. @END_ATTR_K1
Каждый номер аттрибута соответствует определенной ситуации,связанной с событиями в обслуживаемой конфигурации.Т.о. путем задания значений периодов горения/гашения можно установить желаемый режим отображения событий на щите.Например,если изменение ТС следует отображать не мерцанием индикатора с периодом 10 сек/10 сек,а просто свечением,то следует изменить строку описания третьего аттрибута: @ATTR_K1 ... 03\255\0 ... @END_ATTR_K1
4.2.19. При трансляции на экран выдаются сообщения о последовательности действий транслятора. При отсутствии обнаруженных ошибок файла конфигурации будет выдано сообщение об успешном окончании трансляции. Иначе, будет выдано сообщение с указанием кода ошибки. Расшифровка кодов ошибок: //1 - системная ошибка открытия файла конфигурации; //2 - ошибка получения длины файла конфигурации, или длина файла принята равной нулю; //6 - системная ошибка выделения динамической памяти; //7 - системная ошибка cоздания (или открытия) служебного файла; //20 - ошибка в блоке задания общего наименования: указатель ключа окончания меньше ключа начала поля общего наименования; //21 - ошибка в блоке задания общего наименования - длина общей метки больше 100 символов; //22 - ошибка в блоке задания общего наименования - общая метка состоит только из кодов "перевод строки"; //23 - ошибка в блоке задания общего наименования - ошибка выделения памяти под строку общего наименования; //30 - в файле содержится пара одинаковых ключевых слов для задания границ описания направления; //31 - ошибка при задании идентификатора направления. Возможны две ситуации: либо при считывании строки обнаружен конец файла конфигурации, либо произошла системная ошибка выделения памяти под эту строку; //32 - аналогичная ошибка для идентификатора УКП; //33 - не обнаружен ограничитель описания направления;
//34 - в теле блока описания направления между парой ключевых слов @DIRECi . . . @END_DIRECi не обнаружена метка начала тела блока описания УКП (@KP); //35 - в теле блока описания направления для метки @KP не обнаружена метка @END_KP; //36 - метка конца тела блока УКП @END_KP меньше указателя начала описания данного УКП; //37 - число, определяющее адрес УКП, более ширины соответствующего поля; //38 - недопустимый символ в поле описания адреса УКП; //39 - в теле блока описания направления обнаружена пара одинаковых адресов УКП; //40 - в теле блока описания направления обнаружено более 32-х УКП; //41 - адрес УКП превышает допустимое значение (3FH); //42 - в текущей строке описания ТС не найдено значение номера ТС; //43 - в текущей строке описания ТС произошла ошибка при получении номера ТС (либо этот номер выходит за установленные пределы); //44 - в теле блока описания УКП обнаружена пара одинаковых адресов ТС; //45 - в теле блока описания УКПМ описано более 64-х (48-ми для УП-КП.М) ТС; //46 - в идентификаторе ТИТ фактическая длина поля НОМЕР_ТИТ не равна трем симоволам; //47 - в идентификаторе ТИТ в поле НОМЕР_ТИТ нет разделительной точки; //48 - в идентификаторе ТИТ произошла ошибка при получении номера группы ТИТ, либо этот номер выходит за допустимые пределы (значение 1 или 2); //49 - в идентификаторе ТИТ произошла ошибка при получении номера канала ТИТ, либо этот номер выходит за допустимые пределы (значение от 1 до 8); //50 - в теле блока описания УКПМ обнаружена пара одинаковых номеров ТИТ; //51 - в идентификаторе ТИТ обнаружена ошибка в поле КОЭФФИЦИЕНТ_ПЕРЕСЧЕТА; //52 - в идентификаторе ТИТ обнаружена ошибка в поле ПЕРИОД_РЕГИСТРАЦИИ, либо значение периода выходит за допустимые пределы (от 0 до 65500); //53 - в идентификаторе ТИТ обнаружена ошибка в поле ПРИОРИТЕТ, либо значение приоритета выходит за допустимые пределы (от 0 до 250); //54 - в идентификаторе ТИТ обнаружена ошибка при задании периода активизации, либо значение периода выходит за допустимые пределы (от 0 до 65500); //55 - в идентификаторе ТИИ в поле НОМЕР_ТИИ более 1 символа; //56 - в идентификаторе ТИИ произошла ошибка при получении номера канала, либо значение выходит за допустимые пределы (от 0 до 8); //57 - в теле блока описания УКП обнаружена пара одинаковых номеров ТИИ; //58 - в идентификаторе ТИИ обнаружена ошибка в поле КОЭФФИЦИЕНТ_ПЕРЕСЧЕТА;
//59 - в идентификаторе ТИИ обнаружена ошибка в поле ПЕРИОД_РЕГИСТРАЦИИ, либо значение периода выходит за допустимые пределы (от 0 до 65500); //60 - в идентификаторе ТИИ обнаружена ошибка в поле ПРИОРИТЕТ, либо значение приоритета выходит за допустимые пределы (от 0 до 250); //61 - в идентификаторе ТИИ обнаружена ошибка в поле ПЕРИОД_АКТИВИЗАЦИИ, либо значение периода выходит за допустимые пределы ( от 0 до 65500); //62 - в идентификаторе OТ обнаружена ошибка в поле ПРИОРИТЕТ, либо значение приоритета выходит за допустиме пределы (от 0 до 250); //63 - в идентификаторе OТ обнаружена ошибка в поле ПЕРИОД_АКТИВИЗАЦИИ, либо значение периода выходит за допустимые пределы (от 0 до 65500); //64 - в идентификаторе OТ при наличии меток @OT и @END_OT не обнаружено по крайней мере одно из полей; //65 - в идентификаторе ТCA обнаружена ошибка в поле ПРИОРИТЕТ, либо значение приоритета выходит за допустиме пределы (от 0 до 250); //66 - в идентификаторе ТСА обнаружена ошибка в поле ПЕРИОД_АКТИВИЗАЦИИ, либо значение периода выходит за допустимые пределы (от 0 до 65500); //67 - в идентификаторе ТСА при наличии меток @TCA и @END_TCA не обнаружено по крайней мере одно из полей; //68 - в идентификаторе ТУ обнаружена ошибка формата поля нарушение длина поля НОМЕР_ТУ; //69 - в идентификаторе ТУ в поле НОМЕР_ТУ обнаружена ошибка диапазона допустимых значений; //70 - в теле блока описания УКП обнаружена пара одинаковых номеров ТУ; //71 - в идентификаторе ТУ обнаружена ошибка в поле НОМЕР_ПОТВЕРЖДАЮЩЕГО_ТС, либо значение номера ТС выходит за допустимые пределы (от 1 до 64 для УКПМ и до 48 для УП-КП.М); //72 - в идентификаторе ТУ обнаружена ошибка формата поля СОСТОЯНИЕ_ПОДТВЕРЖДАЮЩЕГО_ТС, либо значение ТС выходит за допустимые пределы ( 0 или 1 );
//73 - в теле блока описания УП-КП.М обнаружен идентификатор ТИИ;
//74 - в идентификаторе ТС обнаружена ошибка формата поля АКТ_СОСТОЯНИЕ_ТС;
//75 - ошибка формата байта-указателя уставок ТИТ;
//82 - ошибка создания(или открытия) файла для ПУ;
//83 - ошибка указания счетчика отображений ТС на щит;
//84 - ошибка указания адреса КЩ или номера ячейки этого КЩ,на которую отображ.ТС;
//85 - ошибка указания адреса КЩ или номера ключа при назначении ТУ;
//86 - ошибка оформления блока описания общих ключей;
//87 - ошибка указания типа общего ключа;
//88 - ошибка указания адреса КЩ в блоке описания общих ключей;
//89 - ошибка указания номера ячейки в блоке описания общих ключей;
//90 - ошибка указания счетчика индикаторов в группе(режим группового контроля);
//91 - ошибка указания адреса КЩ или номера индикатора в строке описания ключа группового контроля;
//92 - один ключ указан в качестве заготовки более чем для одной команды ТУ;
//93 - ошибка указания счетчика индикаторов щита по отображению состояния связи;
//94 - ошибка указания адреса КЩ или номера индикатора в строке описания отображения состояния связи;
//95 - ошибка указания номера МИТС для файла внутренней конфигурации;
//96 - ошибка оформления блока описания внутренней конфигурации КЩ;
//97 - ошибка указания периода горения/гашения индикатора ячейки щита(больше 255);
//98 - ошибка указания байта в строке описания МИТС;
4.3. Компоновка библиотеки мнемосхем
4.3.1. Образы мнемосхем УКП должны быть предоставлены рабочей программе скомпонованными в библиотеку файлов *.pcx и описанными в текстовых файлах *.tpc. Руководство по настоящему разделу предполагает ознакомление специалиста с сопроводительной документацией по пакету РСХ.
4.3.2. Выполните графически образы мнемосхем отдельных УКП и общей мнемосхемы КП, обслуживаемых комплексом, любым графическим редактором в стандартной палитре (PaintBRUSH, STORY, DrHALO, AutoCAD и т.п.). При этом следует учитывать ограничения:
а) из-за необходимости отображения на поле мнемосхемы программой служебной информации не рекомендуется занимать элементами мнемосхемы поле шириной полосы 20 пикселов от верхнего и нижнего краев;
б) УГО (условные графические отображения), используемые для отображения состояний ТС и ТУ, должны иметь неразрывный бордюр (контур по периметру), ограничивающий поле индикации УГО и отличающийся от него цветом;
в) внутренние элементы УГО, например: контакты выключателя, текст и т.п. должны быть выполнены цветом бордюра.
4.3.3. При помощи графического редактора получите координаты элементов индикации ТС, ТУ и позиции вывода значений ТИТ отдельно для каждой мнемосхемы и составьте любым текстовым редактором ASCII-файлы описателей (с расширением TPC). Файл- описатель должен содержать отдельные записи - строки, ограниченные символом возврата каретки.
4.3.3.1. Все записи описателей схем следует производить латинскими символами. В одном файле должны быть приведены только те описатели сигналов отдельного УКП, которым предписывается индикация. Разделители между элементами записи - пробелы, каждая строка записи должна оканчиваться кодами ВК и ПС. Число пробелов между элементами записи (строки) не ограничивается. Форматы записей-описателей индикаторов УКП (для общей мнемосхемы), ТС, ТУ ТИТ и ТИИ (для мнемосхем отдельных УКП) приведены ниже. Диапазон значений X - от 1 до 640, Y - от 21 до 329 (при рекомендуемом режиме 640х350х16). Диапазон номеров цветов на изображениях, соответствующих стандартной палитре, приведены в табл.2.
Таблица 2
+------------------------------------------------------------------+ | Номера цветов стандартной палитры | |------------------------------------------------------------------| | 0- черный | 4- красный | 8- темно-серый |12- розовый | | 1- синий | 5- сиреневый | 9- голубой |13- св.-сиреневый| | 2- зеленый | 6- коричневый |10- св.-зеленый |14- желтый | | 3- циановый | 7- светло-серый|11- св.-циановый|15- белый | +------------------------------------------------------------------+
Следует учитывать, что номер цвета индикации состояний ТС и ТУ не должен быть равен номеру цвета бордюра одноименного элемента.
4.3.3.2. Строка описания индикатора ТС на графическом отображении мнемосхемы КП может быть описана в одном из трех вариантов по типам индикаторов:
1) тип 1: два параллельных поля квитирования индикаторов и две параллельные точки заливки индикаторов ( два индикатора ).
TS n 1 X1 Y1 X2 Y2 X3 Y3 X5 Y5 X6 Y6 X7 Y7 С1 С2 С3 X4 Y4
где: TS - метка строки описания индикатора ТС; n - номер канала ТС (от 1 до 64); 1 - типа индикатора; X1, Y1 и X2, Y2 - координаты левого верхнего и правого нижнего углов, соответственно, прямоугольного поля N1 квитирования индикатора ТС манипулятором типа "мышь" и его левой клавишей; X3, Y3 - координаты точки N1 заливки цветом поля индикации ТС (поля, ограниченного цветом бордюра);
X4, Y4 - координаты острия указателя (курсора) при
перемещении его с клавиатуры по матрице положений;
X5, Y5 и X6, Y6 - координаты левого верхнего и правого
нижнего углов, соответственно, прямоугольного поля N2
квитирования индикатора ТС манипулятором типа "мышь" и его
левой клавишей;
X7, Y7 - координаты точки N2 заливки цветом поля индикации ТС
(поля, ограниченного цветом бордюра);
С1 - номер цвета бордюра полей индикации;
С2 - номер цвета индикации состояния ВКЛ контролируемого
объекта;
С3 - номер цвета индикации состояния ОТКЛ контролируемого
объекта.
2) тип 2: одинарное поле квитирования блинкирования индикатора и одна точка заливки индикатора;
TS n 2 X1 Y1 X2 Y2 X3 Y3 С1 С2 С3 X4 Y4 k
где: TS - метка строки описания индикатора ТС;
n - номер канала ТС (от 1 до 64);
2 - тип индикатора;
X1, Y1 и X2, Y2 - координаты левого верхнего и правого нижнего углов, соответственно, прямоугольного поля квитирования индикатора ТС манипулятором типа "мышь" и его левой клавишей;
X3, Y3 - координаты точки заливки цветом поля индикации ТС(поля, ограниченного цветом бордюра);
X4, Y4 - координаты острия указателя (курсора) при перемещении его с клавиатуры по матрице положений;
С1 - номер цвета бордюра поля индикации;
С2 - номер цвета индикации состояния ВКЛ контролируемого объекта;
С3 - номер цвета индикации состояния ОТКЛ контролируемого объекта;
k - номер канала соответствующего ТУ, если УГО ТС и ТУ совпадают(11...18,21...28,31...38,41...48).
3) тип 3: одинарное поле квитирования индикаторов и одна точка заливки индикатора с графическим изменением положения подвижного контакта объекта (ножа выключателя).
TS n 3 k X1 Y1 X2 Y2 X3 Y3 С1 С2 С3 X7 Y7 X5 Y5 X8 Y8 X6 Y6 X4 Y4
где: TS - метка строки описания индикатора ТС;
n - номер канала ТС (от 1 до 64);
3 - тип индикатора;
k - номер канала соответствующего ТУ, если УГО ТУ и ТС совпадают(11...18,21...28,31...38,41...48,0 - отсутствует);
X1, Y1 и X2, Y2 - координаты левого верхнего и правого нижнего углов, соответственно, прямоугольного поля N1
квитирования индикатора ТС манипулятором типа "мышь" и его левой клавишей;
X3, Y3 - координаты точки N1 заливки цветом поля индикации ТС (поля, ограниченного цветом бордюра);
X4, Y4 - координаты острия указателя (курсора) при перемещении его с клавиатуры по матрице положений;
X5, Y5 и X6, Y6 - координаты левой и правой (для изображений широких подвижных элементов, располагаемых вертикально) точек, соответственно, основания (точки поворота) изображения подвижного элемента;
X7, Y7 и X8, Y8 - координаты концевых левых (по ширине изображения контакта при расположении точек основания X5, Y5 и X6, Y6 по горизонтали) точек положения подвижного контакта, соответственно состояниям ОТКЛ и ВКЛ объекта;
С1 - номер цвета бордюра полей индикации;
С2 - номер цвета индикации состояния ВКЛ контролируемого объекта;
С3 - номер цвета индикации состояния ОТКЛ контролируемого объекта.
4.3.3.3. Для отображения оперативной схемы КП предусмотрена возможность оператору при помощи клавиатуры или манипулятора типа "мышь" изменять цветовое отображение объектов, не обслуживаемые средствами телемеханики (разъединители, различные служебные метки). Описание индикаторов этих "пассивных" объектов должно быть выполнено в строке типа NT:
NT n X1 Y1 X2 Y2 X3 Y3 С1 С2 С3 X7 Y7 X5 Y5 X8 Y8 X6 Y6 X4 Y4
где: NT - метка строки описания индикатора пассивного элемента;
n - номер пассивного объекта (от 1 до 32);
X1, Y1 и X2, Y2 - координаты левого верхнего и правого нижнего углов, соответственно, прямоугольного поля переключения пассивного индикатора манипулятором типа "мышь" и его левой клавишей;
X3, Y3 - координаты точки заливки цветом поля индикации (поля, ограниченного цветом бордюра);
X4, Y4 - координаты острия указателя (курсора) при перемещении его с клавиатуры по матрице положений;
С1 - номер цвета бордюра поля индикации;
С2 - номер цвета индикации состояния ВКЛ объекта;
С3 - номер цвета индикации состояния ОТКЛ объекта.
X5, Y5 и X6, Y6 и X7, Y7 и X8, Y8 - координаты служебных точек индикации положения подвижного контакта объекта - соответственно типу 3 описателя ТС;
4.3.3.4. Строка описания "ключа" ТУ на графическом отображении мнемосхемы КП
TU n X1 Y1 X2 Y2 X3 Y3 С1 С2 С3 С4 X4 Y4
где: TU - метка строки описания "ключа" ТУ;
n - номер канала ТУ (11...18, 21...28, 31...38, 41...48);
X1, Y1 и X2, Y2 - координаты левого верхнего и правого нижнего углов, соответственно, прямоугольного поля - "ключа"
команды ТУ при управлении манипулятором типа "мышь" и его левой клавишей;
X3, Y3 - координаты точки заливки цветом поля индикации состояний посылки команды и приема квитанции (поля, ограниченного цветом бордюра);
X4, Y4 - координаты острия указателя (курсора) при перемещении его с клавиатуры по матрице положений;
С1 - номер цвета бордюра поля индикации;
С2 - номер цвета индикации состояния "Команда ТУ отправлена УКП";
С3 - номер цвета индикации состояния "От УКП получена квитанция подтверждения обработки команды ТУ";
С4 - номер цвета индикации выбора обьекта телеуправления для последующего выполнения команды.
4.3.3.5. Строка описания табло ТИТ на графическом отображении мнемосхемы КП
На выделенном поле индикации мнемосхемы (табло) выводится числовое фактическое значение канала n ТИТ в единицах измерения
TI n X1 Y1 С1 X4 Y4
где: TI - метка строки описания табло ТИТ;
n - номер канала ТИТ (11...18, 21...28);
X1, Y1 - координаты левого верхнего угла прямоугольного табло индикации;
X4, Y4 - координаты острия указателя (курсора) при перемещении его с клавиатуры по матрице положений;
С1 - номер цвета отображаемого значения.
4.3.3.6. Строка описания табло ТИИ на графическом отображении мнемосхемы КП
Структура элементов строки аналогична описателю табло ТИИ.
TII n X1 Y1 С1 X4 Y4
где: TII - метка строки описания табло ТИИ;
n - номер канала ТИИ (1...8);
X1, Y1 - координаты левого верхнего угла прямоугольного табло индикации;
X4, Y4 - координаты острия указателя (курсора) при
перемещении его с клавиатуры по матрице положений;
С1 - номер цвета отображаемого значения.
4.3.3.7. Описатели узловых точек мнемосхемы для позиционирования УГО с клавиатуры
Для обеспечения возможности работы без манипулятора типа "мышь" с графическими образами мнемосхем (общей и отдельных КП) предусмотрено перемещение указателя (курсора) по полю с клавиатуры. Перемещение производится согласно матрицы перемещений, описываемой в общем виде строкой типа RZ:
RZ n m
где n - число строк матрицы, m - число столбцов (колонок) матрицы. Матрица должна следовать за строкой типа RZ. Каждая строка матрицы начинается с метки MT. В строке располагаются идентификаторы объектов в порядке, предусмотренном для перемещения курсора. Идентификаторы объектов соответствуют:
для мнемосхем УКП:
от 1 до 64 - индикаторы ТС с номерами от 1 до 64 соответственно,
от 65 до 96 - индикаторы пассивных объектов,
от 97 до 128 - "ключи" телеуправления, соответствующие каналам ТУ ряда 11...18, 21...28, 31...38, 41...48,
от 129 до 144 - табло отображения значений ТИТ с соответствующими номерами каналов из ряда 11...18, 21...28,
FF - "пустое" значение;
для общей мнемосхемы:
от 1 до 128 - номер строки-описателя УКП в файле STR.TPC;
FF - "пустое" значение.
4.3.3.8. Описатели общей мнемосхемы УКП, обслуживаемых устройствами комплекса
В файле-описателе должны быть описаны только те УКП, которые имеются в текущей конфигурации. На общей мнемосхеме недопустимы индикаторы ТУ, ТС, ТИИ, ТИТ и "пассивных" объектов, используемые для построения мнемосхем отдельных УКП.
Формат строки-описателя одного УКП:
KP n АКП X1 Y1 X2 Y2 X3 Y3 X4 Y4 X5 Y5 X6 Y6
где: KP - метка строки описания УКП;
n - номер канала ТЧ (направления) (от 1 до 4);
АКП- адрес УКП (две цифры адреса в диапазоне от 00 до 3Fhex);
X1, Y1 и X2, Y2 - координаты левого верхнего и правого нижнего углов, соответственно, прямоугольного поля выбора УКП манипулятором типа "мышь";
X3, Y3 - координаты точки N1 заливки цветом поля индикации выбора УКП, сигнализации нарушения/восстановления связи с УКП (поля ограниченного контрастным цветом бордюра); X4, Y4 - координаты точки N2 заливки цветом поля сигнализации изменения состояния любого из каналов ТС УКП (поля ограниченного контрастным цветом бордюра);
X5, Y5 - координаты точки N3 заливки цветом поля сигнализации выходов за пределы уставок значения по любому из каналов ТИТ УКП (поля ограниченного контрастным цветом бордюра);
X6, Y6 - координаты точки N4 заливки цветом поля индикации УГО, соответствующего данному УКП, при текущем его обслуживании (поля ограниченного контрастным цветом бордюра);
отдельной строкой описываются цвета полей УГО общей мнемосхемы:
CL C1 C2 C3 C4 C5 C6 C7
где: CL - метка строки описания цветов общей мнемосхемы;
С1 - номер фонового цвета полей индикации УГО УКП;
С2 - номер цвета маркировки выбранного стрелками клавиатуры
УГО УКП;
С3 - номер цвета индикации УГО УКП, выведенного из
конфигурации (по нарушению связи или неисправности УКП);
С4 - номер цвета индикации телесигнализации;
С5 - номер цвета индикации выхода значений ТИТ за пределы уставок допускового контроля;
С6 - номер цвета индикации текущего обращения к УКП;
С7 - номер цвета бордюров всех полей индикации УГО УКП;
4.3.4. Файл-описатель общей мнемосхемы должен находиться в текущем подкаталоге под именем STR.TPC. Структура имен файлов описателей мнемосхем УКП приведена на рис.1. Пример файла описателей мнемосхемы УКП *.tpc:
TS 1 2 202 165 214 175 208 171 9 2 3 208 151
TS 2 2 301 165 407 174 399 169 12 2 3 399 139
TS 3 2 246 167 258 175 252 170 12 2 3 252 150
TS 4 2 65 206 77 217 71 212 9 2 3 71 192
TS 27 2 426 161 443 174 437 167 0 1 4 437 147
TS 28 2 426 180 443 195 437 188 0 1 4 437 168
TS 29 2 426 200 443 215 437 207 0 1 4 437 187
TS 33 2 426 281 443 295 437 288 0 1 4 437 268
TS 34 2 426 300 443 315 437 307 0 1 4 437 287
TU 11 65 206 77 217 71 212 9 5 6 1 71 192
TU 12 46 164 59 174 53 169 9 5 6 1 53 149
TU 13 109 163 121 174 116 169 9 5 6 1 116 149
TU 14 407 295 420 308 414 301 14 5 6 1 414 281
TU 15 202 165 214 175 208 171 9 5 6 1 208 151
TU 16 200 206 214 218 207 212 9 5 6 1 207 192
TU 17 143 187 155 198 149 192 9 5 6 1 149 172
TU 18 260 290 273 304 265 297 14 5 6 1 265 277
TI 11 170 100 0 170 90
TI 13 69 155 0 69 145
RZ 4 4
MT 1 2 3 4
MT 129 FF 27 28
MT 130 29 33 34
MT 109 110 111 112
Структура имен файлов описателей мнемосхем УКП приведена на рис.4.
+-------------------------------------------+ | K | P | _ | X | _ | X | X | . | T | P | C | +-------------------------------------------+ | | | | | | | | | | | | +------------------------+ | +------| Адрес УКП на линии ТЧ | | | (HEX) от 00 до 3F | | |------------------------| +--------------| Номер направления - | | канала ТЧ от 1 до 4 | +------------------------+
Рис. 1. Структура имени файла типа TPC
4.3.5. Развернутый редактором на весь экран образ
мнемосхемы "фотографируйте" резидентным захватчиком pcxgrab.exe (из пакета PCX), предварительно установленным в памяти ПЭВМ.
Захватчик создает в текущем каталоге файлы типа grab***.pcx.
Созданные захватчиком файлы типа grab***.pcx переименуйте в соответствии с форматом, представленным на рис.2. Файл графического образа общей мнемосхемы должен находиться под именем STR.PCX.
+-------------------------------------------+ | K | P | _ | X | _ | X | X | . | P | C | X | +-------------------------------------------+ | | | | | | | | | | | | +------------------------+ | +------| Адрес УКП на линии ТЧ | | | (HEX) от 00 до 3F | | |------------------------| +--------------| Номер направления - | | канала ТЧ от 1 до 4 | +------------------------+
Рис. 5. Структура имени файла типа PCX
4.3.6. Файлы мнемосхем типа *.pcx объедините в библиотеку с именем KP_IMAGE.PCL при помощи утилиты pcxlib.exe пакета PCX и поместите ее в рабочий каталог системы.
4.4. Формирование файла указаний по контролю уставок
4.4.1. При изменении диспетчером блока уставок канала ТИТ УКП и получения квитанции от УКП программа устанавливает в массив заданий функцию контроля блока уставок данного канала ТИТ. При отсутствии в текущем каталоге файла с именем UST.FI или отсутствия указаний в этом файле для данного канала ТИТ эта функция устанавливается с периодом активизации 1 час и приоритетом 200. Таким образом, УПУ каждый час с момента изменения будет контролировать соответствие блока уставок данного канала ТИТ заданным оператором значениям.
При необходимости имеется возможность устанавливать собственные значения периода активизации и приоритета функции запроса блока уставок канала ТИТ. Для этого необходимо создать текстовый файл с именем UST.FI и занести в него соответствующие данные в следующим формате:
KP n1 АКП n2 n3 n4
где: KP - метка строки описания параметров функции контроля
уставок канала ТИТ;
n1 - номер канала ТЧ (направления) (от 1 до 4);
АКП- адрес УКП (две цифры адреса в диапазоне от 00 до 3Fhex);
n2 - номер канала ТИТ (от 1 до 16)
n3 - приоритет функции контроля уставок(от 1 до 249)
n4 - период активизации функции (от 1 до 65500)
Разделители между элементами записи - пробелы, каждая строка записи должна оканчиваться кодами ВК и ПС.
Все символы командной строки после значения приоритета и до конца текущей строки рассматриваются программой как комментарий.
Аналогично рассматриваются строки, которые не начинаются с ключевого слова KP. При некорректно заданных значениях функции передаются параметры по умолчанию.
4.4.2. Также реализована возможность удаления функции контроля из массива заданий. Для этого необходимо в текстовом режиме войти в окно уставок, выбрать с помощью стрелок клавиатуры или "мыши" необходимый канал ТИТ и нажать клавишу DEL.
5. СООБЩЕНИЯ
5.1. При неполучении квитанции от УКП или КЩ оператору выдается сообщение в черном окне, если на экране в текущий момент не отображается хотя бы одно из красных окон. Если красное окно активно, программа выведет мерцающий символ "H" в левом верхнем углу экрана и выдаст черное окно после квитирования оператором красных окон. В черном окне выводится: для УКП - номер направления, наименование и адрес УКП, адрес неотработавшей функции и время автоматического повторного установления сеанса связи (АПУС) с УКП или номер для КЩ. Черное окно должно обязательно квитироваться оператором клавишей F1. Эта же информация с временем регистрации события заносится в дисковый диспетчерский журнал. Адреса неответивших УКП и КЩ хранятся системой в памяти ПЭВМ, а номера УКП и все последние принятые от них значения телеинформации отмечаются при отображении символом "*" в соответствующих окнах.
5.2. При успешной попытке связи с неответившим раннее УКП или КЩ через время АПУС или при контрольном опросе его оператором на экран выдается сообщение в зеленом окне, если на экране в текущий момент не отображается хотя бы одно из красных или черных окон. Если красное или черное окно активно, программа выдаст зеленое окно после квитирования оператором красных и черных окон. В зеленом окне выводится: для УКП - номер направления, наименование и адрес УКП, адрес успешно выполлненной функции и время автоматического повторного установления сеанса связи с УКП или номер для КЩ. Эта же информация с временем регистрации события заносится в дисковый диспетчерский журнал. Зеленое окно удаляется с экрана при нажатии оператором клавиши F1 или при регистрации программой аварийного события.
5.3. В процессе работы комплекса производится диагностирование оборудования УПУ телекомплекса.При обнаружении неисправности КТМС АБПУ в журнал выводится сообщение "Направление N выведено из опроса. В качестве возможной ошибки могут рассматриваться следующие: Не снимается сигнал готовности КТМС АБПУ;
Нет сигнала готовности КТМС АБПУ;
КОНЦ-М получено от КТМС некорректное сообщение;
Сбой обмена между КТМС и КОНЦ-М;
5.4. При обнаружении программой ошибок конфигурации телекомплекса в журнал заносится сообщение с указанием номера направления, адресов УКП и описанием обнаруженной ошибки:
"Ответ от УКП, которого нет в конфигурации";
"Ответ от УКП из незадействованного направления";
"Адрес УКП вопроса не равен адресу УКП ответа".
5.5. При обнаружении программой ошибок в работе АМК или ПУ оператору выдается сообщение с описанием ошибки и программа выходит в ДОС.
Возможные вида ошибок:
Ошибка при приеме информации от АМК(XX);
От ПУ нет квитанции или АМК принимает с ошибкой;
У ПУ стабильная ошибка приема;
Адрес ПУ вопроса не равен адресу ПУ ответа;
Неопознанная информация от АМК (XXX);
Логическая ошибка последней команды ПЭВМ (X).
5.6. В процессе работы диагностируется оборудование обслуживаемых УКП. В случае обнаружении ошибок УКП в журнал заносится сообщение .
Возможные сообщения об ошибках УКПМ-2:
1) "Смещение нуля АЦП не в допуске";
2) "Смещение эталона АЦП не в допуске";
3) "Нет предварительного сброса при снятии байтов ТС";
4) "Некорректная установка номера группы при снятии ТС".
Сообщения об ошибках УП-КП.М:
1) "Непрерывная сигнализация по n-ой группе ТС";
2) "Обнаружена неисправность УП-КП.М при работе с ТС".
5.7. Для УКПМ-2 в результате активизации запроса блока внутренней диагностики возможны также следующие сообщения:
1) "Норма";
2) "Нет предварительного сброса при выполнении команды ТУ";
3) "Нет установки группы в команде ТУ";
4) "Некорректная установка группы в команде ТУ";
5) "Активный объект при контрольной установке группы ТУ";
6) "Нет установки объекта в команде ТУ";
7) "Некорректная установка объекта в команде ТУ";
8) "Активная группа при контрольной установке объекта ТУ";
9) "Несравнение байтов ТУ после выдачи команды".

Митюшкин К. Г.
Телеконтроль и телеуправление в энергосистемах. — МОСКВА: Энергоатомиздат, 1990.
Рассмотрены теоретические основы телемеханики, принципы построения и функционирования современных телеинформационно-управляющих комплексов и их применение на всех уровнях диспетчерского управления энергосистемами. Особое внимание уделено развитию новых микропроцессорных систем телемеханики в автоматизированных системах управления, базирующихся на применении микро- и мини-ЭВМ.
Для инженерно-технических и научных работников, занимающихся разработкой, проектированием и эксплуатацией информационно-управляющих систем в энергетике, может быть полезна студентам вузов.
ПРЕДИСЛОВИЕ
Телемеханика в энергетике является быстро развивающейся отраслью техники сбора, передачи, обработки и отображения информации, необходимой для оперативного централизованного контроля процессами производства и распределения электроэнергии. К настоящему времени произошли существенные изменения как в технических средствах, так и в методах передачи телемеханической информации. Завершено формирование автоматизированных систем диспетчерского управления (АСДУ) на высших уровнях диспетчерского управления (ЦДУ Единой энергосистемы СССР, ОДУ объединенных энергосистем, а также большинство районных энергетических управлений страны). Оперативно-информационные комплексы (ОИК) АСДУ базируются на средствах вычислительной техники с использованием современных систем обработки и представления оперативной информации на цифробуквенных и графических цветных дисплеях. Для передачи оперативной информации между диспетчерскими пунктами различного ранга управления широко используются микроЭВМ, которые наряду с традиционными видами телемеханической информации (ТИ, ТС, ТУ и т. п.) передают также цифро-буквенную информацию для межуровневого межмашинного обмена информации при оперативных расчетах режимов энергосистем, для систем автоматического регулирования, противоаварийной автоматики, управления сверхдальними линиями электропередачи, в том числе линиями постоянного тока, и т. д.
В крупнейших диспетчерских центрах управления энергосистемами формируются оперативно-информационные управляющие комплексы (ОИУК) АСДУ на базе локальных вычислительных сетей с распределением задач между персональными компьютерами, микро- и мини-ЭВМ с использованием общей распределенной между различными уровнями управления базы данных.
Изменились также методы передачи информации для управления энергосистемами. На смену циклическим методам передачи приходят адаптивные методы со сжатием данных, позволяющие повысить точность и быстродействие передачи сигналов по каналам связи и эффективность использования ЭВМ, обрабатывающих телеинформацию. В связи с широким использованием микропроцессорных элементов и микроЭВМ в системах передачи и обработки данных существенно
изменились принципы их разработки, проектирования и эксплуатации. Переход от жесткосхемной логики, характерной для построения систем телемеханики предшествующих поколений, к программируемой логике микропроцессорных элементов требует от разработчиков, проектировщиков, наладчиков и эксплуатационного персонала в энергосистемах знания принципов архитектуры микроЭВМ и основ их программного обеспечения. Разработаны и начинают осваиваться промышленностью и эксплуатацией первые отечественные микропроцессорные телекомплексы (ГРАНИТ, АИСТ, УВТК-120 и др.). Следует отметить, что отечественная промышленность крайне медленно разворачивает производство и освоение микропроцессорных систем телемеханики и существенно отстает от передовых зарубежных стран (США, ФРГ, Франции и др.). Ввиду отсутствия отечественных специализированных микропроцессорных систем телемеханики в энергосистемах Советского Союза начали широко применяться универсальные микроЭВМ фирмы ВИДЕОТОН (ВНР), оборудованные специально разработанными телемеханическими канальными адаптерами, позволяющими использовать их в качестве центральных приемо-передающих станций (ЦППС) в системах передачи оперативных данных (СПОД). Дальнейшее развитие получили системы телемеханики для управления распределительными сетями 6—10 кВ, особенно сельскохозяйственного назначения. Начат промышленный выпуск телемеханических комплексов этого назначения на заводе ’’Электропульт” Минэлектротехпрома СССР.
Готовятся новые международные стандарты и рекомендации по системам телемеханики в рамках технического комитета ТК-57 МЭК.
Перечисленные выше вопросы разработки и применения новых систем телемеханики для телеконтроля и телеуправления в энергетике нашли отражение в предлагаемой книге.
Автор выражает искреннюю благодарность рецензенту доктору техн. наук, проф. Н. Д. Сухопрудскому за ценные замечания, сделанные им при чтении рукописи, а также научным сотрудникам лаборатории телемеханики и информатики ВНИИЭ А. Л. Вулису и Т. Е. Георгиевской за ценные советы при ее написании.
Автор
ВВЕДЕНИЕ
В.1. ТЕРМИНОЛОГИЯ
Телемеханика — отрасль техники и техническая наука об управлении и контроле на расстоянии посредством преобразования управляющих воздействий и контролируемых параметров в сигналы, передаваемые по каналам связи. [1].
Телемеханика изучает проблемы, связанные с управлением объектами, удаленными от центра управления на значительные расстояния. Управление и контроль состояния удаленных объектов осуществляются из центра управления по протяженным каналам связи. Именно поэтому термин ’’телемеханика” включает слово ’’теле”, что означает даль, удаленность (ср. ’’телевидение”, ’’телефония”, ’’телеграфия” и пр.). Слово ’’механика” (греч. mechanike) означает мастерство, умение, управление. В современном русском языке понятие ’’механика” однозначно предполагает механические перемещения предметов. На ранних стадиях развития телемеханика действительно была связана исключительно с механическим воздействием на объекты управления и контроля (включение на расстоянии электромеханических реле, контакторов, управление показаниями стрелочных измерительных приборов и т. п.). Однако с развитием электронной техники и особенно с введением в контуры управления и контроля ЭВМ термин ’’телемеханика” в его первоначальном смысле стал достаточно условным.
Международный электротехнический словарь использует в английском тексте обобщающий термин TELECONTROL, который удачно объединяет понятия ’’управление” на расстоянии и ’’контроль” независимо от характера воздействия на объект (механического, электронного или другого). В русском языке этому термину наиболее соответствует термин ’’телеуправление”. Однако в отечественной литературе этот термин традиционно применяется лишь в отношении функции передачи команд (приказов) и не охватывает задачи наблюдения (контроля) за управляемым процессом. Поэтому в настоящем издании обобщающий термин TELECONTROL заменяется словосочетанием ’’телеуправление и телеконтроль”, либо применяется традиционный термин ’’телемеханика”, если иметь в виду его условность в упомянутом выше смысле.
Согласно ГОСТ 26.005—82 термин ’’телемеханика” включает в себя более частные понятия, связанные с функциями телемеханических систем: телеизмерение (ТИ), телесигнализация (ТС), телеуправление (ТУ), телерегулирование (ТР) и т. п.
Термин ’’телеконтроль” объединяет функции ТИ, ТС, а также любые другие функции НАБЛЮДЕНИЯ состояния управляемого (контролируемого) процесса на расстоянии.
В последнее время в зарубежной литературе, особенно американской, появился сокращенный термин, удачно объединяющий функции телемеханических устройств в системах управления: SCADA (Suppervisure Control and data acvisation), что в дословном переводе означает "управление на расстоянии и сбор данных”. По существу системы телемеханики в АСДУ энергосистем выполняют функции систем, именуемых на западе SCADA.
ОСНОВНЫЕ ЗАДАЧИ ТЕЛЕМЕХАНИКИ И ИХ ОСОБЕННОСТИ
Централизация управления.
Телемеханика изучает и разрабатывает методы и средства технического и программного обеспечения централизованного управления и контроля производственными процессами сложных производственных комплексов, содержащих многочисленные территориально разобщенные, но связанные единым технологическим процессом объекты.
Эффективное управление такими сложными производствами возможно лишь из управляющих центров (пунктов управления — ПУ), куда должна поступать необходимая контрольная информация от всех объектов, участвующих в едином процессе производства. В результате обработки этой информации ПУ вырабатывают команды управления контролируемым процессом, учитывающие текущее состояние всех контролируемых объектов.
Процесс производства электроэнергии на электростанциях (тепловых, гидроэлектрических, атомных и др.) и распределения ее между потребителями, связанными с электрическими подстанциями высоковольтными линиями электропередачи, является классическим примером сложных технологических процессов, требующих применения телемеханических методов и средств централизованного управления и контроля.
Режим реального времени.
Особенностью работы телемеханических систем является обеспечение управления и контроля в режиме реального времени. Контрольная и командная информация, доставляемая в центры и на объекты управления, должна поступать в темпе текущего управляемого технологического процесса. Это означает, что система телемеханики должна вносить минимальное запаздывание при передаче информации и управляющих воздействий. Обеспечением режима реального времени телемеханические системы отличаются от остальных систем передачи информации, таких, например, как системы передачи данных (АПД), телетайп, телеграф и т. п. В зависимости от скорости протекания контролируемых процессов допустимые запаздывания передачи информации, обеспечивающие режим реального времени, различны. Так, для систем автоматического регулирования частоты и активной мощности в энергосистемах запаздывание управляющих воздействий не должно быть больше 1 с, для систем телеуправления выключателями мощности — несколько секунд, для систем телеотключения — несколько десятков миллисекунд и т. д.
Высокая надежность и достоверность доставки информации.
Системы телемеханики должны обеспечивать высокую надежность доставки информации и ее достоверность, поскольку ущерб от передачи неправильных команд или других оперативных сообщений и задержка в передаче этих сообщений могут привести к большим экономическим потерям, а в отдельных случаях — и к гибели людей, причем требуемая надежность доставки информации и ее достоверность должны обеспечиваться в условиях повышенных уровней помех, характерных для специальных каналов связи, используемых в энергетике (высокочастотная связь по высоковольтным линиям электропередачи, каналы тональной частоты по распределительным электрическим сетям, радиосвязь в условиях сильного влияния линий электропередачи и т. п.). Для этой цели в телемеханических системах широко используются различные методы помехозащищенного кодирования сообщений, обеспечивающие заданную вероятность не обнаруживаемых ошибок, дублирование (резервирование) каналов связи и т. д.
Эффективное использование каналов связи.
Каналы связи являются наиболее дорогостоящей составляющей системы передачи информации. Поэтому наряду с передачей телемеханической информации они используются для телефонной, телеграфной и других видов связи. В телефонных каналах частотная полоса каналов телемеханики обычно ограничена надтональным или подтональным диапазоном, вследствие чего скорость передачи телемеханической информации обычно не превышает 200 бит/с.
В этих условиях особенно важно обеспечить высокую эффективность телепередачи данных, которая характеризуется отношением числа правильно переданных бит информации к общему числу передаваемых бит в сообщении в единицу времени.
Использование каналов связи с ограниченной частотной полосой пропускания в условиях сильных помех требует применения методов сжатия данных, предотвращающих занятие канала неэффективной повторяющейся информацией.
Обеспечение "наблюдаемости" контролируемого процесса и оперативности управления.
Система телемеханики должна обеспечивать передачу в центр управления достоверной информации из стратегически важных пунктов энергосистем о реальном текущем состоянии процесса и выдавать диспетчеру эти данные в таком виде, чтобы он был в состоянии быстро и точно реагировать на отклонения режима от нормы. Обеспечение максимальной оперативности при ликвидации аварий в энергосистеме является одной из важнейших задач системы телемеханики.
Первичная обработка информации.
Современные системы телемеханики, использующие встроенные микроЭВМ и микропроцессорную технику, решают задачу первичной обработки информации. Имеется в виду обработка информации как ”на местах” с целью ее ’’сжатия” перед передачей по каналу связи, так и в центрах управления при вводе в ЭВМ. Тем самым решается задача повышения эффективности использования каналов связи и ЭВМ оперативно-информационных комплексов АСДУ. На нижних уровнях диспетчерского управления, где специальные мини- или микроЭВМ, как правило, не устанавливаются, микропроцессорные системы телемеханики должны выполнять определенный набор функций по обработке информации для местных ОИК.
Самоконтроль, ремонтопригодность, расширяемость и совместимость.
Эксплуатация средств телемеханики в энергосистемах представляет весьма сложную и трудоемкую задачу для обслуживающего персонала, особенно с учетом того, что информационные объемы и функции систем телемеханики непрерывно возрастают. Поэтому первостепенное значение приобретают такие характеристики систем, как самоконтроль устройств с автоматической сигнализацией и локализацией неисправностей, ремонтопригодность отдельных плат и блоков.
Система ТМ также должна допускать относительно несложную перестройку при расширении информационного объема и обеспечивать совместимость с существующими системами ТМ, ЭВМ ОИК и аппаратурой каналов связи, находящимися в эксплуатации (желательно программным путем, без изменения электронных блоков устройств).
Условия окружающей среды.
Условия окружающей среды, в которых эксплуатируются устройства ТМ (УТМ), могут быть весьма разнообразными: от помещений с кондиционированным воздухом и постоянным обслуживанием до установки на необслуживаемых объектах и открытом воздухе. Надежная работа устройств телемеханики в столь широком диапазоне внешних условий гарантируется различными исполнениями УТМ — классами, ограничивающими их применение конкретными условиями эксплуатации. По многообразию классов, допускающих использование УТМ в различных условиях окружающей среды, системы телемеханики родственны системам релейной защиты и автоматики, что существенно отличает их от средств универсальных ЭВМ.

Рис. В.1. Сравнение уровневых структур моделей общей системы связи (по ISO-CCITT) и системы телемеханики по стандарту МЭК (для конфигурации "точка-точка”)
Рис. В.2. Уровневая структура функций системы телемеханики

Как и для любой сложной системы передачи данных, функции систем телемеханики подразделяются на несколько определенных уровней, каждый из которых по существу не зависит от выше и ниже расположенных уровней. Ниже расположенный уровень выполняет обслуживающие функции, выше расположенный является главным, с которым данный уровень обменивается информацией и сообщает об ошибках. Обычно каждый функциональный уровень связан с соответствующим уровнем на другой стороне канала связи. На рис. В.1 представлены уровневые структуры моделей системы передачи информации общего назначения (согласно международному стандарту ISO—CCITT) и системы телемеханики (стандарт МЭК) [41].
Функции систем телемеханики подразделяются на следующие уровни (рис. В.2):
пользовательские функции (уровень 7);
функция оперативной обработки и отображения данных (уровни 5-6);
функции транспортировки данных, включая все уровни передачи — физический, канальный и сетевой (уровни 1-4).
Пользовательские функции подразделяются на основные (базисные) и вторичные. Основные — это функции основного назначения системы телемеханики — телеконтроль и телеуправление технологическими процессами. Вторичные функции — производные от основных — определяют возможности системы по обработке и представлению (отображению) информации пользователю. Объем вторичных пользовательских функций, выполняемых системами телемеханики, зависит от типов применяемых устройств. Для микропроцессорных систем, располагающих достаточным объемом памяти и соответствующим программным обеспечением, эти функции составляют основное содержание задач ОИК. Для тех диспетчерских пунктов (ДП), на которых наряду с микропроцессорными устройствами телемеханики имеются микро- или мини-ЭВМ ОИК, вторичные пользовательские функции распределяются между УТМ и этими ЭВМ.
Основные пользовательские функции УТМ в энергосистемах
ТЕЛЕКОНТРОЛЬ (telemonitoring)* — наблюдение за состоянием контролируемых процессов и оборудования. Составляющими телеконтроля являются:
а) телеизмерение (ТИ, telemetering) — передача по каналам связи значений непрерывно изменяющихся параметров контролируемых процессов (мощности, напряжения, токов и т. п.). Телеизмерения передаются либо непрерывно, либо по вызову диспетчера. Различают также передачу всех периодических отсчетов ТИ (циклическая передача) либо передачу только изменившихся значений (адаптивная, спорадическая передача). Контролируемый ТИ-параметр может характеризоваться либо текущими мгновенными, либо интегральными значениями за заданный интервал времени. Соответственно применяются термины: ’’телеизмерение текущих значений” (ТИТ) и ’’телеизмерение интегральных значений” (ТИИ). Последнее часто осуществляется число-импульсным методом. Поэтому функция ТИ таких систем часто именуется ТЕЛЕСЧЕТ (ТИ энергии, расхода жидкости, газа и т. п.);
В скобках приводятся соответствующие термины, принятые в [1 ].
б) телесигнализация (ТС, teleindication) — передача дискретных сигналов о состоянии контролируемого оборудования (положение выключателей мощности, разъединителей, анцапф трансформаторов, уставок автоматики и т. п.). Передача ТС осуществляется либо спорадически — при изменении состояния контролируемого объекта, либо циклически — непрерывно с подтверждением переданного ранее состояния. Чаще всего при ТС осуществляется передача позиций двухпозиционных объектов (включено, отключено).
Телеуправления (ТУ, telecomand) — передача по каналам связи команд от диспетчера (оператора) к коммутационным аппаратам (выключателям мощности, разъединителям, контакторам и т. п.) для изменения положения оперативного оборудования. Если оперативное оборудование имеет более двух возможных состояний, то телеуправление состоянием этого оборудования называют телеустановкой (teleadjusting). Когда команды передаются с ПУ, а реализуются на КП оперативным персоналом, такая функция называется телекомандованием (teleinstruction); обычно телекоманды (телеинструкции) представляются в визуальной форме (например, на табло с обозначением команд и т. п.). Если передача команд осуществляется от автомата к автомату (например, от устройств релейной защиты, установленных на одном конце линии, к выключателям мощности, расположенным на другом ее конце), то такой вид телеуправления называется автотелеуправлением (АТУ).
Телерегулирование (TP, teleregulation) — передача управляющих воздействий типа ’’больше—меньше”, ’’прибавить—убавить” и других от диспетчера к регулятору, установленному на КП. Управляющее воздействие продолжается в течение времени посылки соответствующих команд диспетчером.
Телерегулирование может осуществляться и в замкнутом цикле — без участия человека. Тогда целесообразно употребить термин ’’автотел ерегулирование” — АТР: передача телеизмерений от датчика к центральному регулятору, расположенному на ДП, и передача от него значений уставок местному регулятору на КП. АТР имеет место, например, в системе автоматического управления и регулирования частоты и мощности (САУРЧМ), где роль центрального регулятора выполняет мини-ЭВМ.
Большинство современных телемеханических систем выполняет некоторый комплекс перечисленных функций, например ТИ—ТС, ТУ—ТИ—ТС и т. п. В соответствии с выполняемыми функциями системы ТМ часто так и именуются: системы ТИ—ТС, ТУ—ТС—ТИ и т. п.
Вторичные пользовательские функции
Вторичные пользовательские функции предназначены для обеспечения оператора (диспетчера) информацией, удобной для использования. Эти функции не всегда четко определены, так как их состав зависит от возможностей приемных устройств ТМ по обработке данных основной информации (ТИ, ТС и т. п.). Вторичные пользовательские функции могут выполняться как собственно микропроцессорными УТМ, так и отдельной пост включенной мини- или микроЭВМ. Объем функций, выполняемых УТМ, зависит от объема памяти и наличия соответствующего программного обеспечения.
Типовые вторичные пользовательские функции:
суммирование ТИ и образование обобщенных сигналов ТС автоматически или по заданию диспетчера;
указание пределов контролируемых параметров;
автоматическая регистрация событий с указанием времени; контроль каналов связи и устройств ТМ с регистрацией ошибок и неисправностей;
оценка состояния контролируемого процесса в реальном времени; формирование графиков плановых и текущих значений контролируемых параметров;
формирование оперативных схем и форм представления информации на экранах дисплея с указанием текущих значений информации ТИ и ТС; обеспечение диалога оператор—система ТМ.
Функции оперативной обработки сигналов
Эта группа функций охватывает обработку сигналов входа — выхода на КП и ПУ с целью повышения эффективности и надежности выполнения пользовательских функций. К типовым функциям оперативной обработки относятся:
обеспечение заданного интерфейса сигналов входа—выхода между УТМ и контролируемым процессом на КП и УТМ и человеком-оператором на ПУ (ДП), включая фильтрацию входных сигналов от действия помех, дребезга контактов реле и ключей датчиков информации;
формирование сигналов начала передачи (например, при изменении состояния контролируемых объектов);
защита от ошибок датчиков и от помех во входных и выходных цепях УТМ;
сжатие данных на входе и выходе УТМ;
представление сигналов выхода в форме, удобной для отображения на пользовательском уровне (на щите, дисплее, пульте и т. п.).
Применение микропроцессорных систем ТМ предоставляет широкие возможности по выполнению оперативной обработки информации на энергообъектах и по рациональному распределению функций обработки между ПУ и КП с целью разгрузки центральных станций ТМ и ЭВМ ОИК на диспетчерских пунктах, повышения достоверности передаваемой от энергообъектов информации и повышения эффективности использования каналов связи.
Функции передачи (транспортировки) сообщений
В соответствии с основным назначением систем телемеханики в энергетике — контроль и управление процессами производства и распределения электроэнергии на расстоянии — функции передачи сообщений между контролируемыми и контролирующими станциями являются определяющими во всей системе телемеханики.
Типовые функции передачи сообщений, которые выполняются на транспортном (включая сеть) и более низких уровнях передачи (уровни 4—1 на рис. В.2), должны обеспечивать:
высокую достоверность (целостность) доставки сообщений по каналам связи в условиях высокого уровня помех, вызываемых электромагнитным влиянием высоковольтных линий электропередачи, коммутационными явлениями в силовых цепях и пр.;
малое время телепередачи для обеспечения режима реального времени при контроле технического процесса и управлении им;
высокую эффективность использования каналов связи в условиях ограниченной частотной полосы пропускания каналов.
Главное препятствие для удовлетворения этих требований — их противоречивость: обеспечение высокой достоверности передачи данных связано с увеличением времени и снижением эффективности телепередачи, повышение эффективности путем удлинения кодовых блоков приводит к потере большого объема информации в условиях повышенного уровня помех и как следствие — к увеличению времени доставки сообщений и т. п. Поэтому функции передачи сообщений должны обеспечивать разумный компромисс между этими противоречивыми требованиями.
Для выполнения этих требований на каждом уровне передачи сообщений решается свой круг задач:
на транспортном уровне (включая сеть):
разделение сообщений на блоки, введение короткоформатных блоков для передачи экстренных сообщений;
введение приоритетов передачи и управление этими приоритетами, разделение передаваемых данных по классам обслуживания (классы диалоговых процедур);
обеспечение резервного пути доставки сообщения при повреждении основного канала (маршрутизация сообщений);
на канальном уровне:
преобразование входных сигналов от датчиков в последовательность дискретных сигналов, кодирование выходных сигналов по определенному закону с целью обеспечения необходимой помехозащищенности при передаче по каналу связи;
декодирование сигналов, принятых из канала связи, контроль правильности приема, обнаружение (а иногда и исправление) ошибок, квитирование принятых сообщений, синхронизация кадров;
согласование полосы частот и уровней сигналов УТМ и канала связи с помощью модема, формирование сигналов передачи и приема (в канал и из канала связи), контроль качества сигнала и синхронизация приемника и передатчика УТМ.
Функции физического уровня определяются видом физической среды, которая служит для передачи сигналов между передающим и приемным устройствами ТМ.
Основные виды каналов связи, применяемые в энергетике для систем телемеханики, следующие:
собственные (Минэнерго СССР) подземные или подвесные кабели связи;
проводные воздушные линии связи;
арендованные телефонные (телеграфные) линии и каналы связи; радиоканалы УКВ;
ВЦ каналы по высоковольтным линиям электропередачи (35 кВ и выше) и каналы тональной частоты по силовым распределительным электрическим сетям 10 кВ и ниже;
оптико-волоконные линии и т. д.
Физические параметры сигналов, передаваемых по этим каналам, допустимые уровни отношения сигнал/помеха и другие характеристики регламентируются стандартами.
Телемеханическая система состоит из устройств ТМ, расположенных на диспетчерских и контролируемых пунктах, связанных между собой каналами связи. Структура системы ТМ определяется структурой диспетчерского управления, взаимным географическим расположением контролируемых энергообъектов и пунктов контроля и управления и структурой каналов связи.
Если система ТМ содержит один или несколько диспетчерских пунктов одного уровня управления, то она является одноуровневой, если же в системе ТМ имеются диспетчерские пункты двух или более уровней ДУ, то это двух- или многоуровневая система.
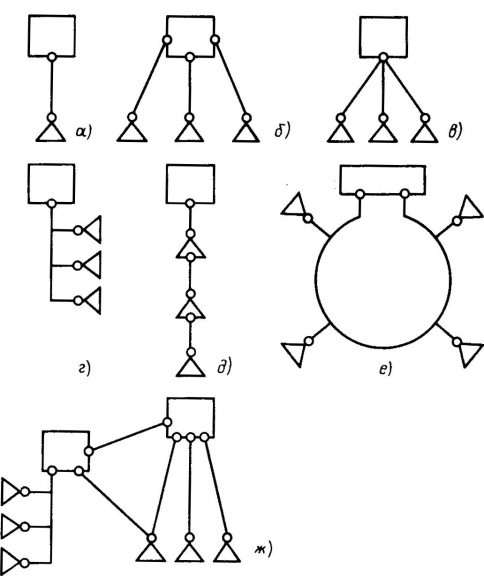
Рис. В.3. Структуры телемеханических систем:
а - ”точка-точка”; б - многоточечная радиальная ’’один-один”; в - многоточечная радиальная ’’один-N”; г - многоточечная магистральная; д - цепочечная (транзитная); е - кольцевая; ж - смешанная иерархическая
Типовые структуры систем ТМ относятся к одноуровневым системам. В стандарте МЭК ’’Устройства и системы телемеханики” [41, публикация 870.1.1] выделяются следующие типовые структуры систем ТМ (рис. В.3):
а) ’’пункт—пункт” (’’точка—точка”); структура, при которой один ПУ соединен с одним КП выделенным каналом связи;
б) многоточечная радиальная ’’один—один”; устройство ПУ, имеющее N линейных терминалов, связано с N КП. Возможен одновременный независимый обмен информацией между ПУ и каждым КП;
в) многоточечная радиальная (звездная) ’’один — N”; устройство ПУ связано с N устройствами КП через общий линейный терминал, обслуживающий N радиальных каналов связи. Одновременно только один КП может передавать информацию на ПУ. Передача общих команд с ПУ может производиться на все КП одновременно, передача индивидуальных команд - по адресу КП;
г) многоточечная магистральная; устройство ПУ связано общим каналом связи с N устройствами КП, расположенными вдоль этого канала. Организация связи между ПУ и КП такая же, как для многоточечной радиальной структуры;
д) цепочечная (транзитная) структура; устройство ПУ связано цепочечным каналом связи с устройствами КП. На КП производится ретрансляция сигналов;
е) многоточечная кольцевая; общий канал связи образует ’’кольцо”, к которому подключены все устройства КП. Кольцо замыкается устройством ПУ. При повреждении на одном из участков канала работоспособность КП сохраняется, так как связь с каждым из них может быть организована с двух сторон.
Кроме отмеченных типовых структур встречаются разнообразные их комбинации, образующие так называемые гибридные смешанные структуры. Гибридные структуры особенно характерны для многоуровневых иерархических систем ТМ, когда на разных уровнях диспетчерского управления могут встречаться структуры разных типов (рис. В.3,ж).
На рис. В.4 представлена обобщенная схема системы ТМ простейшей структуры ’’пункт—пункт”. Система ТМ в узком смысле состоит из устройств телемеханики ПУ и КП, соединенных каналом связи. Оконечная аппаратура канала ’’модем” связана с УТМ посредством стандартного или специализированного интерфейса (в зависимости от типа используемого модема). Стандартные модемы CCITT связаны с УТМ по стыку V.24. Специализированные простейшие модемы, применяемые в каналах телемеханики для энергосистем (например, типа АПСТ завода ’’Нептун”), имеют четырехпроводную связь с УТМ, регламентированную техническими условиями на аппаратуру телемеханики.
Система ТМ в ’’широком смысле” дополнительно включает устройства ввода—вывода информации (УВВ ТМ). На ПУ — это устройство отображения и ввода оперативной информации — диспетчерский щит ДЩ и пульт управления ПлУ, контрольный дисплей и регистрирующее печатающее устройство РПУ. Последние устанавливаются в зависимости от возможностей УТМ управлять стандартными средствами ввода- вывода и служат как для отображения и регистрации оперативной информации, так и для расширения сервисных функций при обслуживании УТМ. На диспетчерском щите располагаются основные средства отображения общего пользования: мнемонические схемы контролируемых объектов с сигнальными лампами, стрелочными и цифровыми приборами и т. п. На пульте управления расположены ключи управления, мнемосхема управляемого объекта с сигнальными лампами, табло и другими указывающими приборами. Интерфейс УТМ ПУ—ДЩ может включать в себя ряд промежуточных вспомогательных устройств, входящих в комплекс УТМ ПУ, и задается техническими условиями на этот комплекс.
Для оказания помощи диспетчеру в ведении оперативного режима энергосистем на всех крупных диспетчерских пунктах созданы оперативно-информационные комплексы АСДУ с соответствующими устройствами ввода—вывода информации УВВ ОИК. В состав ОИК входят ЭВМ, получающие телеинформацию непосредственно от УТМ и обрабатывающие ее в темпе поступления, т. е. в режиме реального времени, ЭВМ ОИК управляет средствами отображения индивидуального пользования (дисплей Д) и коллективного пользования (табло ТБ, печатающие устройства АЦПУ, обобщенные символы ДЩ и т.п.). Оперативная информация от диспетчера вводится в ЭВМ через функциональную клавиатуру ФК.
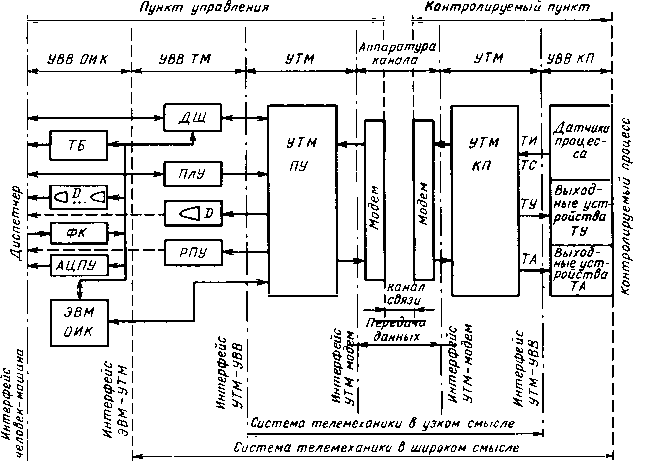
Рис. В.4. Обобщенная схема системы телемеханики ’’пункт-пункт”:
УВВ ОИК — устройства ввода—вывода оперативно-информационного комплекса; УВВ ТМ — устройства ввода-вывода системы телемеханики; УТМ - устройство телемеханики; ПУ — пункт управления; КП — контролируемый пункт; УВВ КЦ — устройства ввода—вывода контролируемого пункта; ТБ — табло диспетчера; D — дисплеи; ФК — функциональная клавиатура; АЦПУ — аналого-цифровое печатающее устройство; ДЩ - диспетчерский щит; ПлУ - пульт управления; РПУ - регистрирующее печатающее устройство; ТИ, ТС, ТУ, ТА - входные и выходные сигналы устройства телемеханики
Таблица В.1. Основные функциональные блоки УТМ
Наименование блоков | Функциональное назначение | Аппаратура |
Блоки входа-выхода на КП (сторона контролируемого процесса), устройства ввода-вывода | Преобразование контролируемого физического процесса в электрические сигналы на входе УТМ | Аналоговые цифровые датчики ТК, входные датчики ТК, входные реле ТС |
Преобразование сигналов на выходе УТМ в команды оперативного управления | Выходные реле ТУ | |
Блоки обработки входных и выходных сигналов на КП | Фильтрация входных сигналов от помех | Входные фильтры |
Обработка входных сигналов | Логические схемы | |
с целью повышения информативности (усреднение, интегрирование, суммирование ТИ; формирование обобщенной ТС) | (программа) | |
Преобразование аналог-код | АЦП | |
Запоминание входных и выходных сигналов | Оперативная память | |
Анализ изменения контрольной информации и формирование сигнала запуска | Логические схемы (программа) | |
Контроль правильности ТУ | То же | |
Блоки кодирования и декодирования на КП и ПУ | Преобразование параллельнопоследовательное (и наоборот) | Регистры (программа) |
Формирование помехозащищенных кодов | Кодер (программа) | |
Приоритеты передачи | Логические схемы (программа) | |
Распознавание и защита от ошибок | Декодер (программа) | |
Блоки передачи- приема сигналов | Обеспечение надежной и помехозащищенной передачи по каналу связи | Модем, стандарт CCITT; специальный модем |
Контроль качества сигнала | То же | |
Синхронизация биг приема-передачи |
| |
Контроль исправности канала связи | »» |
Интерфейс сопряжения УТМ-ЭВК ОИК зависит от многих факторов и в частности от наличия промежуточных устройств сопряжения типа модулей ввода—вывода ЭВМ. Как правило, этот интерфейс схемно или программно реализуется в УТМ ПУ и должен оговариваться в технических условиях на сопряжение с ЭВМ. Единого международного стандарта на интерфейс УТМ—ЭВМ ОИК не существует. Объясняется это, в частности, и тем, что программируемые микропроцессорные устройства телемеханики способны сами выполнять многие функции по оперативной обработке и управлению средствами отображения информации, в связи с чем ЭВМ ОИК все больше разгружаются от непосредственного выполнения функций ввода и рутинной обработки телеинформации, отчего требования к интерфейсу УТМ—ЭВМ, естественно, меняются.
На КП устройствами ввода—вывода УВВ являются датчики ТИ, ТС, аварийных сигналов и других видов контрольной информации, а также выходные устройства ТУ двухпозиционными или многопозиционными объектами, устройства телеавтоматики ТА, телекомандирования и тд.
Интерфейс УТМ—УВВ регламентируется стандартом МЭК ’’Устройства и системы телемеханики” [41, публикация 870.3].
Основные функциональные блоки устройства телемеханики приведены в табл. В.1. Их функции в УТМ могут выполняться либо благодаря фиксированным соединениям между логическими элементами (принцип жесткой логики), либо программным путем (принцип программируемой логики). В последнем случае УТМ имеет структуру специализированной микроЭВМ и ее функции задаются программой.
Классификация основных программных модулей программируемых УТМ приведена на рис. В.5.
Продолжение табл. В.1
Наименование блоков | Функциональное назначение | Аппаратура |
Блоки обработки данных на ПУ | Вычислительные функции: усреднение, интегрирование, масштабирование, суммирование и т. п. | Программа |
Логические функции: формирование обобщенных ТС, контроль пределов, сортировка данных | То же | |
Преобразование код-аналог | ЦАП | |
Запоминание сигналов | Оперативная память | |
Оценка состояния | Программа | |
Блоки входа-выхода на ПУ (сторона диспетчера, оператора) | Преобразование сигналов выхода в информацию, понятную оперативному персоналу, и преобразование действий персонала в сигналы управления Отображение и регистрация данных диалог человек-машина | Диспетчерский щит, дисплей, пульт (консоль) управления, ключи управления (программа) |
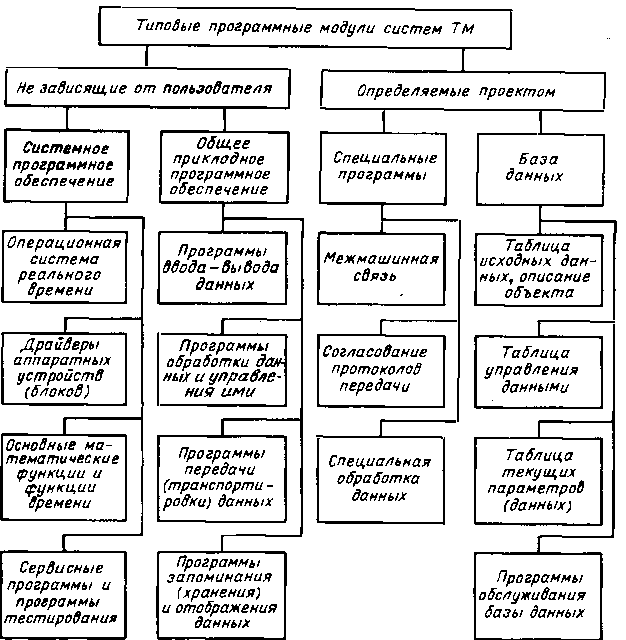
Рис. В.5. Программное обеспечение систем телемеханики
Программное обеспечение систем ТМ может быть подразделено на два типа. Первый тип — основные программы, не зависящие от конкретных условий применения и обеспечивающие выполнение заданного набора функций; они записываются постоянным запоминающим устройством (ПЗУ) и поставляются заводом-изготовителем совместно с аппаратурой ТМ. Второй тип — программы, определяемые конкретными условиями пользователя и зависящие от проектных данных. Эти программы в основном записываются пользователем в оперативное запоминающее устройство (ОЗУ) либо в ПЗУ с помощью специального блока-программатора в составе УТМ.
Глава первая
СИСТЕМЫ ТЕЛЕМЕХАНИКИ В ДИСПЕТЧЕРСКОМ
УПРАВЛЕНИИ ЭНЕРГОСИСТЕМАМИ
СТРУКТУРА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ
Системы телемеханики играют, важную роль в диспетчерском управлении производством и распределением электроэнергии, снабжая диспетчерские пункты различного уровня иерархии оперативной контрольной информацией о режимах работы энергосистем и обеспечивая передачу команд по управлению этими режимами. Надежность и экономичность работы энергосистем во многом зависят от надежной работы систем ТМ.
Структура систем телемеханики во многом определяется структурой диспетчерского управления, сложившейся в энергетике.
Как известно, диспетчерское управление в энергосистемах имеет многоуровневую иерархическую структуру со строгим подчинением низшего звена высшему (рис. 1.1). Высшей ступенью диспетчерского управления является Центральное диспетчерское управление Единой энергетической системой СССР (ЦДУ ЕЭС).
В настоящее время ЕЭС СССР объединяет более 80% энергосистем страны, в них производится более 92% всей вырабатываемой в стране электроэнергии.
Оперативным центром ЦДУ, из которого осуществляется диспетчерское управление работой объединенных энергосистем (ОЭС), является диспетчерский пункт ЦДУ ЕЭС. ОЭС формируются по территориально-экономическому принципу, объединяя энергосистемы соседних административных областей и промышленно-экономических районов. В состав ЕЭС СССР входят девять ОЭС: Центра, Северо-Запада, Юга, Северного Кавказа, Закавказья, Средней Волги, Урала, Казахстана и Сибири. Еще два энергообъединения работают изолированно от ЕЭС СССР — ОЭС Средней Азии и ОЭС Дальнего Востока, в дальнейшем планируется подсоединение этих ОЭС к ЕЭС. Тем самым будет завершено создание Единой Энергосистемы Советского Союза.
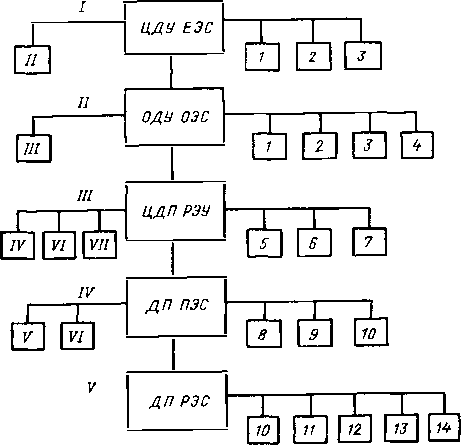
Рис. 1.1. Многоуровневая структура диспетчерского управления в энергетике:
I - ДП ЦДУ ЕЭС СССР; II - ДП ОДУ ОЭС; III - ЦДП энергосистем; IV - ДП предприятия электросетей; V - ДП района электросетей; VI - ДП городских электросетей; VII - ДП тепловых сетей; 1 - крупнейшие электростанции; 2 - магистральные ВЛ 400-750 кВ; 3 - крупные узловые ПС 400- 750 кВ; 4 - ВЛ и ПС межсистемного значения; 5 - электростанции системного значения; 6 - межсистемные и основные ВЛ 110-400 кВ; 7 - ПС системного значения; 8 — электростанции местного значения; 9 - основные ВЛ предприятия 35-220 кВ; 10 - транзитные ПС 35-220 кВ; 11 - оперативные дежурные участки электросетей; 12 - распределительная сеть 35-110 кВ и местная сеть 0,4- 10 кВ; 13 - распределительные ПС 35-110 кВ; 14 - участки местной сети 0,4- 10 кВ
Оперативными центрами ОЭС являются ДП ОДУ ОЭС. В состав ОЭС входят районные энергосистемы (РЭУ) - в среднем по 10 РЭУ в каждой ОЭС. Каждая районная энергосистема, входящая в ОЭС, имеет собственный оперативный центр — Центральный диспетчерский пункт (ЦДП) энергосистемы.
На 1 января 1986 г. общее количество ЦДП энергосистем составило 101. Управление высоковольтными распределительными электросетями осуществляется специально предназначенными для этой цели диспетчерскими пунктами предприятий электросетей (ДП ПЭС) и районов электросетей (ДП РЭС), входящих в энергосистему.
Нижним (базисным) уровнем системы диспетчерского управления являются энергообъекты - электростанции, высоковольтные подстанции, линии электропередачи с соответствующим энергооборудованием, коммутационной и измерительной аппаратурой.
Электростанции, подстанции или часть их оборудования, на которых оперативные переключения или изменения режима работы могут производиться по прямому указанию оперативного персонала ДП, в зону действия которого входит данный энергообъект, называются энергообъектами, находящимися в непосредственном оперативном управлении данного диспетчерского пункта. Если же переключения и изменения режима работы энергообъектов производятся персоналом данного ДП только по указанию или с разрешения вышестоящего ДП, то такие энергообъекты называются энергообъектами, находящимися в оперативном ведении вышестоящего ДП.
Так, в оперативном управлении или оперативном ведении ДП ОДУ находятся электростанции, подстанции и часть их оборудования и линии электропередачи, на которых изменение режима работы или коммутационные переключения существенно влияют на надежность и экономичность работы объединенной энергосистемы. Такие энергообъекты называются энергообъектами межсистемного значения. К ним, в частности, относятся межсистемные линии электропередачи, обеспечивающие параллельную работу и обмен мощностями между энергосистемами, а также так называемые регулирующие станции, принимающие участие в регулировании частоты и покрытии пиковых нагрузок в объединенных энергосистемах.
В оперативном управлении или ведении (через ДП ПЭС, например) ЦДП энергосистемы находятся энергообъекты системного значения, т. е. те, работа которых существенно влияет на надежность и экономичность работы данной энергосистемы. К таким энергообъектам, в частности, относятся электростанции, мощность которых превышает 3—5% суммарной установленной мощности энергосистемы, называемые основными электростанциями энергетической системы.
Характер подчиненности энергообъектов тем или иным диспетчерским пунктам определяет объемы и пути оперативной информации, передаваемой на диспетчерские пункты средствами телемеханики.
Передача телемеханической информации на диспетчерский пункт верхней ступени управления от энергообъектов, находящихся в оперативном ведении данного ДП, как правило, осуществляется методом ретрансляции с ДП нижней ступени. Однако при оперативном управлении отдельными энергообъектами передача телеинформации желательна непосредственно с этих энергообъектов на данный ДП. Число пунктов ретрансляции, как правило, не должно превышать двух, так как при увеличении этого числа ухудшается качество информации на верхнем уровне управления — повышается погрешность ТИ вследствие увеличения запаздывания, увеличивается запаздывание ТС, ухудшается надежность доставки информации и т. п.
Диспетчерская связь ДП данного ранга с подчиненными ему ДП низшего ранга, а также с энергообъектами, находящимися в непосредственном оперативном управлении данного ДП, осуществляется по прямым каналам связи. Эти каналы связи должны резервироваться с автоматическим переходом на исправный канал. Для устройств телемеханики, работающих в системах противоаварийной автоматики или автоматического регулирования, зто требование является обязательным. При этом резервирование должно производиться по независимым каналам связи.
Передача телеинформации на верхних уровнях диспетчерского управления осуществляется по арендованным каналам Министерства связи либо по ведомственным высокочастотным каналам по линиям электропередачи. При этом для систем телемеханики выделяется узкий надтональный частотный диапазон в телефонном канале, ограничивающий скорость передачи сигналов телемеханики скоростью 50—300 бит/с. Лишь в отдельных случаях под телемеханическую передачу может быть задействован весь телефонный канал (при передаче со скоростью 1200 бит/с).
Для передачи информации на уровне энергообъект—энергосистема и в распределительных электрических сетях используются ВЧ каналы по ВЛ, низкочастотные каналы по воздушным и кабельным линиям связи, ультракоротковолновая радиосвязь и каналы наложенной тональной частоты по ВЛ 6 (10) кВ.
Допустимая скорость передачи сигналов телемеханики по этим каналам связи не превосходит 50—200 бит/с.
Телемеханизация диспетчерских пунктов энергосистем и понизительных подстанций (ПС) 20 кВ и выше по данным Союзтехэнерго на 1 января 1986 г. характеризуется следующими цифрами [40]:
из общего числа ЦДП энергосистем телемеханизированы 96 ЦДП, т. е. 94% общего числа энергосистем. Общее число ДП ПЭС и ДП РЭС равно 2804, из них телемеханизировано 684, т. е. 24,4% общего их числа;
из общего числа 28 540 понизительных ПС 20 кВ и выше обслуживаются без постоянного дежурного персонала на щите управления 25 169, т. е. 88,2% подстанций, в том числе с телеуправлением 2312 (8,1%) подстанций, только с телеконтролем 2382 (8,3%); только с аварийно-предупредительной телесигнализацией 5741 (20,1%). Остальные ПС без постоянного обслуживания оснащены различной местной сигнализацией.
Устройства телемеханики, так же как и вычислительные машины, в соответствии с их аппаратной базой подразделяются на несколько поколений:
- е поколение — на релейно-контактных электромеханических и электронно-ламповых элементах;
- е поколение — на бесконтактных магнитных и полупроводниковых элементах;
- е поколение — на интегральных логических микросхемах малого и среднего уровня интеграции;
- е поколение — на микропроцессорах, БИС с программным управлением.
Основные характеристики УТМ в энергосистемах
Таблица 1.1.
№ п.п. | Тип УТМ | Поколение | Количество ДП (ПУ), КП (ПСТ) | Максимальная информационная емкость одного КП | Структура системы, канал связи |
1 | МКТ-1 | 2 | До 2 ДП, 1 КП | 5 ТИ или 35 ТС, 10ТИ или 70 ТС | Пункт-пункт; симплекс |
2 | МКТ-2 | 2 | До 2 ДП, 1 КП | 10ТИ или 70 ТС, 20 ТИ или 160 ТС, 30 ТИ или 240 ТС | То же |
3 | ВРТФ-3 | 2 | До 2 ДП, 1 КП | 80 ТС, 40 ТУ, | Пункт-пункт; дуплекс |
4 | МКТ-3 | 3 | До 3 ДП, 1 КП | 60 ТИ, 4 ЦТИ, | То же |
5 | ТРС-1 | 3 | 1 ПУ, до 15 КП | 3 ТС, 1 ТУ | Многоточечная; полудуплекс |
6 | ТМ-512 | 3 | 1 ДП, 1 КП | 60 ТИ, 480 ТС | Пункт-пункт; дуплекс |
7 | TM-800 | 3 | 1 ДП, 1 КП | 64 ТИ, 256 ТС | Пункт-пункт; симплекс |
8 | TM-800 В | 3 | 1 ДП, 1 КП | 20 ТС, 20 ТУ, | Пункт-пункт |
9 | ТМ-120 М | 3 | 1 ДП, до 30 КП | 16 ТИ, 48 ТС, | Многоточечная магистральная, дуплекс |
10 | КУСТ-Б | 3 | 1 ДП, до 10 КП | 1 ТИ, 24 ТС, 10 ТУ, | То же |
11 | УТС-8 | 2 | 1 ДП, до 4 КП | 8 ТС | Многоточечная радиальная; симплекс |
12 | УТК-1 | 2 | 1 ПУ, 1 КП | 1 ТИ, 4 ТС | Пункт-пункт; симплекс |
13 | УТМ-7 | 3 | 1 ПУ, 1 КП | 7 ТИ, 8 ТС | То же |
14 | ЦППС РПТ-70 | 4 | 1 ПУ, до 32 ПСТ | До 256 ТИ, до 2048 ТС, | Многоточечная радиальная; дуплекс |
15 | ЦППС РПТ-80 | 4 | 1 ПУ, до 64 ПСТ | То же | То же |
16 | АИСТ | 4 | 1 ПУ, до 32 КП | До 128 ТИ, до 1024 ТС, ЦБИ до 250 знаков в блоке |
|
Скорость передачи, бит/с | Элементная база | Основной уровень использования | Завод-изготовитель; год начала промышленного выпуска |
40, 60, 80 | Полупроводниковые элементы | ЦДП РЭУ, ДП ПЭС | ’’Электропульт”, г. Ленинград, 1968 г. |
40, 80, 160 | То же | То же | ’’Электропульт”, г. Ленинград, 1972 г. |
40 | Ферритовые элементы с ППГ, полупроводниковые элементы | ЦДП РЭУ, ДП ПЭС, ДП РЭС | То же |
50,100, 200, 300, 600, 1200 | Интегральные микросхемы (ИМС) | То же | ’’Электропульт”, г. Ленинград, 1987 г. |
6, 25, 100 | ИМС | ДП РЭС, | ’’Электропульт”, г. Ленинград, 1986 г. |
25, 37,5 | ИМС | ЦДП РЭУ | ’’Промавтоматика”, г. Житомир, 1970 г. |
25, 50, 75, | То же | То же | ЭТА, г. Нальчик, 1975 г. |
50, 75, 100, |
| ДП ПЭС, ДПРЭС | То же |
100 |
| ДППЭС, ДПРЭС | КИП, г. Краснодар, 1980 г. |
40 | ИМС | ДП ПЭС, ДПРЭС | ’’Нептун”, г. Одесса |
25,50 | Полупроводниковые элементы | ДП ПЭС, ДПРЭС | ’’Союзэнергоавтоматика”, г. Киев, 1980 г. |
50 | Полупроводниковые элементы | САУР ЧМ | ’’Союзэнергоавтоматика”, г. Киев, 1980 г. |
50, 100, 200, | Интегральные микросхемы | То же | ’’Союзэнергоавтоматика”, г. Киев, 1984 г. |
50,100, 200, 300, 600,1200 | Микропроцессорные элементы | ЦПУ ЕЭС, ОДУ ОЭС | ’’Видеотон”, ВНР, 1975 г. |
50,100, 200, 300, 600,1200 | То же | ЦДУ ЕЭС, ОДУ ОЭС, | ’’Видеотон”, ВНР, 1983 г. |
50,100, 200, 300, 600, 1200 | »» | ЦДП РЭУ, ДП ПЭС, ДПРЭС | ’’Нептун”, г. Одесса, 1985 г. |
| Поколение | Количество ДП (ПУ), КП (ПСТ) | Максимальная информационная емкость одного КП | Структура системы, канал связи | |
№ | Тип УТМ | ||||
17 | АИСТ-РС | 4 | 1 ПУ, до 32 КП | До 16 ТИ, 32 ТС, 16 ГИЭ, 16 ТУ, 64 РТС, 16 РТУ | Многоточечная радиальномагистральная; полудуплекс |
18 | ГРАНИТ | 4 | Базовая модель: 1 ПУ до 16 КП; (ПУ + КП) до 128 | Базовая модель: | Многоточечная радиальномагистральная, полудуплекс |
19 | УВТК-120* | 4 | 1 ПУ, до 60 КП | 160 ТИ, 256 ТС, | То же |
20 | ТК-113* | 4 | 1 ПУ, до 30 КП | 40 ТИ, 128 ТС, |
|
* Выпуск планируется на 1990 г.
Примечание. ПСТ - периферийная станция; ВТИ - вызов телеизмерения; ТИ; ЦТИ - цифровое ТИ; САУР - система автоматического управления и регуляции,
ППГ - прямоугольная петля гистерезиса·, ТР—ВТИ - телерегулирование с вызовом пирования; ОП - опорная подстанция; ТИИ - ТИ интегральное; ТИЭ - ТИ энергии; РТС, РТУ - ретрансляция ТС, ТУ.
В настоящее время большинство УТМ, эксплуатирующихся в энергосистемах, относятся ко 2-му и 3-му поколениям.
Первые микропроцессорные системы телемеханики начали появляться в эксплуатации в энергосистемах лишь в 1987—1988 гг. (ГРАНИТ в ОДУ Урала, АИСТ в Литовэнерго и Витебскэнерго). Однако уже с середины 70-х годов функции микропроцессорных УТМ начали успешно выполнять универсальные микроЭВМ типов РПТ-70 и РПТ-80, укомплектованные специальными канальными адаптерами. На базе этих микроЭВМ были разработаны центральные приемо-передающие станции (ЦППС), осуществляющие ретрансляцию телеинформации на уровнях ЦДУ ЕЭС и ОДУ ОЭС.
Основные типы УТМ, эксплуатируемых в энергосистемах, и их краткая характеристика приведены в табл. 1.1.
Продолжение табл. 1.1
Скорость передачи, бит/с | Элементная база | Основной уровень использования | Завод-изготовитель; год начала промышленного выпуска |
50, 100, 200, | »» | ДП ПЭС, ДП РЭС | ’’Нептун”, г. Одесса, 1987 г. |
50, 100, 200, | Микропроцессорные элементы | ЦДП РЭУ, ДП ПЭС | ’’Промавтоматика”, |
50, 100, 200, | То же | ДП ПЭС, ДП РЭС | КИП, г. Краснодар |
50, 100, 200, |
| ДП ПЭС, ДП РЭС | ПО ’’Севкавэлектрон- маш”, г. Нальчик |
Телемеханизация диспетчерских пунктов трех высших уровней диспетчерского управления практически была завершена в 60-е годы на
базе УТМ 2-го поколения. Новый этап развития систем сбора и передачи диспетчерской информации связан с созданием АСДУ. К середине 70-х годов АСДУ были созданы во всех объединенных и ряде крупных энергосистем. В этих условиях роль системы телемеханики еще более возросла в связи с необходимостью оперативного информационного обеспечения ЭВМ, входящих в состав АСДУ, включая межмашинный информационный обмен между ОИК АСДУ разных уровней диспетчерского управления. Резко возросли объем информации, передаваемой в режиме реального времени, и ее функциональное назначение, повысились требования к надежности, достоверности и быстродействию передаваемых сообщений. Удовлетворение этих требований в условиях низкоскоростных каналов передачи сигналов телемеханики привело к необходимости применения дополнительной обработки информации в местах ее передачи и приема, а именно: сжатия сигналов и введения приоритетов сообщений при передаче по каналам связи, дополнительной достоверизации информации, разгрузки ЭВМ ОИК от выполнения рутинных операций при вводе и первичной обработке телеинформации и т. д. В связи с новыми требованиями системы телемеханики 3-го поколения (системы на интегральных микросхемах с жесткосхемной структурой) были заменены на высших уровнях диспетчерского управления (начиная с конца 70-х годов) программируемыми устройствами приема—передачи оперативной информации, выполняемыми на базе универсальных микроЭВМ.
В настоящее время на трех верхних уровнях диспетчерского управления функционирует система передачи оперативных данных (СПОД), выполненная на микроЭВМ РПТ-70 и РПТ-80 (производство завода ’’Видеотон”, ВНР). Основными элементами СПОД являются центральные приемо-передающие станции, установленные на диспетчерских пунктах ЦДУ ЕЭС, на всех ОДУ ОЭС и многих ЦПД энергосистем; ЦППС выполнены на двух взаиморезервирующих микроЭВМ РПТ. В состав аппаратных модулей РПТ включены специально разработанные и поставляемые фирмой ’’Видеотон” платы сопряжения с каналами связи (программируемые канальные адаптеры).
Основные принципы СПОД
Программируемость основных функций.
Благодаря применению микроЭВМ и микропроцессорных устройств основные функции и параметры системы - информационная емкость, число обслуживаемых каналов связи и др. — задаются программным путем. Это обеспечивает необходимую гибкость системы и универсальность ее применения в конкретных условиях эксплуатации, сравнительно незначительные расходы на перестройку системы при ее расширении и т. п. Все изменения в системе сводятся к изменению программ без вмешательства в электронную схему аппаратов. Программное обеспечение состоит из системных программ, обеспечивающих выполнение основных функций системы, и пользовательских программ, которые записываются пользователем в соответствии с конкретными условиями применения.
Централизация приема информации на диспетчерских пунктах.
Вместо многочисленных приемников УТМ (по числу каналов связи) и ретранслирующего УТМ на ДП устанавливается единая централизованная приемо-передающая станция·, обеспечивающая независимый прием информации от множества (до 64) каналов связи и дальнейшую ретрансляцию ее на вышестоящий ДП. Централизация приема информации со всех каналов и ретрансляция ее в одном устройстве повышают экономичность системы за счет существенного сокращения площадей аппаратных помещений, числа кабельных связей и т. п. Одновременно обеспечивается возможность полного дублирования приема и передачи информации по всем направлениям одним резервным аппаратом ЦППС.
* Далее по тексту, а также на рис. 1.2 централизованная приемо-передающая станция обозначается ЦППС либо ЦСТ (централизованная станция телемеханики). Кроме того, ЦСТ облегчает ввод информации в ЭВМ оперативно-информационного управляющего комплекса, являясь по существу концентратором информации, выполняющим функции предпроцессора. И, наконец, программируемая ЦППС выполняет функцию ’’коммутации сообщений”, комплектуя по заданному алгоритму сообщения, посылаемые к вышестоящему ДП.
Адаптивность и сжатие сообщений.
Передающие станции системы работают по принципу ’’интеллектуальных терминалов”, т. е. сами принимают решение о необходимости передачи в канал связи с ЦППС тех или иных сообщений и их приоритетности в зависимости от состояния контролируемых процессов в текущий момент времени. Система передачи, обладающая свойством приспосабливаемости к текущей ситуации, называется адаптивной, а метод передачи — адаптивным. При использовании адаптивного метода исключается передача не обновленных сообщений, характерная для циклического метода передачи в УТМ. При этом передаваемые сообщения как бы сжимаются за счет исключения из передачи малоинформативных сообщений. Тем самым увеличивается пропускная способность каналов связи, т. е. повышается эффективность их использования. Коэффициент полезного действия мини-ЭВМ ОИУК также повышается за счет разгрузки ее от переработки неинформативных сообщений.
Реализация адаптивных методов передачи определяется соответствующей программой.
Многофункциональность передаваемой информации.
Информация, циркулирующая в СПОД, предназначена для выполнения различных функций диспетчерского управления энергосистемами. Адаптивные алгоритмы передачи и развитая система приоритетов позволяют совместить в одной системе передачу информации для оперативно-диспетчерского контроля и управления (ТИ, ТС, ТУ), межмашинного межуровневого обмена цифро-буквенной информацией (ЦБИ) и сбора данных суточной ведомости, а также для систем автоматического телерегулирования и противоаварийной автоматики. Система кодирования передаваемой информации в СПОД обеспечивает минимальные задержки передачи высокоприоритетных сообщений.
Совместимость и поэтапный ввод системы в эксплуатацию "сверху вниз".
В СПОД предусмотрена возможность подключения к канальным входам ЦППС каналов от находящихся в эксплуатации УТМ. Для этой цели ЦППС имеют специальные программируемые канальные адаптеры, которые настраиваются на прием информации от передатчиков УТМ. На первом этапе внедрения СПОД ЦППС устанавливаются на верхнем уровне управления в ЦДУ ЕЭС СССР. Канальные входы ЦППС подключаются к каналам связи параллельно с существующими УТМ (для этого канальные входы ЦППС должны быть достаточно высокоомными). По мере отладки программ приема весь комплекс УТМ в ЦДУ ЕЭС заменяется одной ЦППС. На втором этапе ЦППС устанавливаются в ОДУ ОЭС, заменяя ретранслирующие и приемные УТМ. В конце этого этапа СПОД эксплуатируется по схеме: ЦППС ЦДУ ЕЭС СССР - ЦППС на всех ОДУ ОЭС — передатчики УТМ на ДП энергосистем и энергообъектов, подчиненных ОДУ ОЭС. На последующих этапах внедрения осуществляется замена УТМ на ЦППС в энергосистемах и т. д. при движении ’’сверху вниз” до уровня энергообъектов. Принцип внедрения ’’сверху вниз” обеспечивает бесперебойную эксплуатацию телеинформационных систем на всех уровнях диспетчерского управления.
Разделение функций между микроЭВМ СПОД и мини-ЭВМ ОИУК.
На верхних уровнях диспетчерского управления образуется сложный многомашинный комплекс, состоящий, как правило, из двух микроЭВМ СПОД и двух мини-ЭВМ ОИУК. При организации этого комплекса возникает задача рационального распределения функций приема и обработки телеинформации между микроЭВМ и мини-ЭВМ.
МикроЭВМ СПОД выполняет функцию предпроцессора мини-ЭВМ, обеспечивая ввод телеинформации со всех каналов связи в едином формате. При этом микроЭВМ СПОД заменяет периферийные модули ввода мини-ЭВМ или специализированные устройства ввода (типа УСТМ) и благодаря предварительной обработке вводимой телеинформации уменьшает загрузку мини-ЭВМ. Высвобождающееся машинное время (примерно 10—15% общего времени) позволяет полнее использовать логические и вычислительные возможности мини-ЭВМ для решения ряда оперативных задач. С другой стороны, при наличии мини-ЭВМ некоторые функции по обработке и отображению телеинформации целесообразно выполнять программами мини-ЭВМ. К таким функциям относятся, в частности:
управление дисплеями при отображении телеинформации и в режиме диалога диспетчер-СПОД;
масштабирование при цифровом воспроизведении ТИ;
ввод и вывод цифро-буквенной информации;
арбитраж по назначению одной из двух взаимно резервирующих микроЭВМ главной.
Вместе с тем с целью повышения надежности многомашинного комплекса часть наиболее важной оперативной информации должна выводиться на средства отображения напрямую из микроЭВМ.
На тех диспетчерских пунктах нижних уровней управления, где мини-ЭВМ ОИУК отсутствуют, программное обеспечение микроЭВМ СПОД должно предусматривать выполнение функций информационной системы ОИУК (в упрощенном варианте).

Рис. 1.2. Структура СПОД:
ЦППС, ЦСТ - центральные приемо-передающие станции; ПСТ - периферийная станция; УТМ — устройство телемеханики; ДЩ — диспетчерский щит; ЦП - цифровые приборы; АП - аналоговые приборы; Д ~ дисплей
Конфигурация сети СПОД.
Основная структура сети связи на верхних уровнях управления — радиальная (рис. 1.2). ЦППС СПОД связана со всеми нижестоящими ДП или энергообъектами независимыми дуплексными каналами связи. Число дуплексных каналов, обслуживаемых одной ЦППС, — до 64 (с учетом резервных каналов — 128), из них обычно два канала используются для передачи информации на вышестоящий ДП, а остальные — для приема информации с нижестоящих объектов. Такая структура сети (называемая радиальной многоточечной) дает возможность независимого приема информации со всех каналов связи и обеспечивает минимальные задержки сбора информации. ЦППС СПОД полностью использует эту возможность, обеспечивая одновременный независимый прием информации со всех каналов связи.
Наряду с радиальными каналами на уровнях ОДУ энергосистем организуются поперечные связи между смежными ЦППС одного и того же уровня. При этом образуется радиально-кольцевая структура связи, которая обеспечивает дополнительную живучесть системы, а также позволяет обмениваться информацией с ’’соседом”. При наличии у данной ЦППС связей с верхней и смежной ЦППС информация на верхнюю ЦППС может поступать через смежную ЦППС в случае повреждения прямого канала. Аналогично при повреждении канала со смежной станцией информация на нее может поступать через ЦППС верхнего уровня.
Для большей надежности все каналы связи и ЦППС СПОД должны быть дублированы. Нормально информация от передающей ЦППС передается одновременно по основному и резервному каналам связи и с одного из них вводится в обе приемные ЦППС верхнего уровня.
СПОД на уровне ЦДУ ЕЭС СССР - ОДУ ОЭС [33]
Структура и основные функции системы.
Все ЦППС СПОД, установленные в ЦДУ ЕЭС и ОДУ ОЭС, выполнены на микроЭВМ РПТ-70 и РПТ-80 (по две микроЭВМ на ЦППС). ЦППС ЦДУ ЕЭС и ОДУ ОЭС связаны радиальными дуплексными каналами связи — по два канала на каждый ОДУ (основной и резервный), общее число основных каналов связи для РПТ-70 равно 32. Между отдельными соседними ОДУ организованы поперечные каналы связи. Скорость передачи по каналам — 200 бит/с. В общем случае ЦППС верхнего уровня предусматривает выполнение следующих функций:
централизованный прием и передача телеинформации по каналам связи с аналогичными ЦППС и УТМ различных типов (МКТ-1, МКТ-2, ТМ-512, УТК, TM-800);
межуровневый обмен цифро-буквенной информацией между мини- ЭВМ ОИУК, в частности для передачи суточной ведомости;
сжатие ТИ при их ретрансляции на верхний уровень управления и при вводе в ЭВМ;
управление средствами отображения информации как автономно, так и от мини-ЭВМ.
Межмашинный межуровневый обмен позволяет организовать передачу между любыми связанными сетью мини-ЭВМ не только обычной телеинформации, но и пседоизмерений (до рассчитанных в мини-ЭВМ параметров режима, обобщенных ТС, результатов расчета оценки состояния), цифро-буквенных сообщений (данных суточной ведомости, состояния оборудования и т. п.). Кроме того, появляется возможность организации запроса одной ЭВМ внерегламентных данных из банка другой ЭВМ.
Выполнение перечисленных функций централизованным приемопередатчиком позволяет полностью заменить все приемные и ретранслирующие УТМ на пункте управления более надежными, гибкими, компактными и удобными в эксплуатации микропроцессорными устройствами. Одновременно обеспечивается экономия ресурсов мини-ЭВМ, использовавшихся ранее для хранения и выполнения программ ввода информации от различных УТМ.
Сжатие телеинформации обеспечивает возможность увеличения в 3 — 5 раз объема ТИ, передаваемого по каналам из ОДУ в ЦДУ, и существенного снижения времени запаздывания при передаче ТИ. Соответственно снижается удельная загрузка мини-ЭВМ работой по приему ТИ.
Одной из важных функций ЦППС является управление средствами отображения информации для диспетчера. Предусматривается подключение к ЦППС: одного-двух алфавитно-цифровых или псевдографических дисплеев, устанавливаемых на пульте диспетчера (рядом с дисплеями, управляемыми мини-ЭВМ), мнемосхемы ДЩ и аналоговых приборов (показывающих и регистрирующих); группы цифровых приборов, размещаемых на ДЩ.
Возможность автономного (без связи с мини-ЭВМ) управления этими средствами отображения превращает ЦППС в высоконадежную подсистему оперативного контроля за текущим режимом сети, причем надежность ЦППС почти на порядок выше надежности мини-ЭВМ (за счет большей степени интеграции, простоты технических и программных средств).
Двухмашинный комплекс ЦППС.
Структура двухмашинного комплекса ЦППС СПОД на базе микро-ЭВМ типа РПТ-70 для ОДУ приведена на рис. 1.3. В состав РПТ входят центральный процессор INTEL-8080 (К-580), оперативная память (ОЗУ и перепрограммируемое ПЗУ) общим объемом 40—64 Кбайт, платы последовательного и параллельного интерфейсов для подключения периферийных устройств и мини- ЭВМ, до восьми канальных микропроцессорных адаптеров. Каждый адаптер рассчитан на подключение четырех дуплексных каналов связи (со скоростью от 50 до 1200 бит/с). На противоположных концах каналов могут быть подключены передатчики (приемники) УТМ или ЦППС. Настройка адаптера на тот или иной тип передатчика (приемника) осуществляется изменением программы в ППЗУ адаптера.
Средства отображения информации, предназначенные для диспетчера, подключаются к обеим РПТ через автоматический переключатель П1. Каждая микроЭВМ оснащается некоммутируемым сервисным дисплеем ДС, выполняющим функции пульта контроля и управления РПТ. Коммутация каналов между двумя РПТ, а также переключение с основного на резервный канал осуществляется вторым автоматическим переключателем П2.

Рис. 1.3. Двухмашинный комплекс ЦППС на микроЭВМ РПТ:
ЦП - цифровые приборы; АП - аналоговые приборы; УУ - устройство управления; УС - устройство сопряжения РПТ и ВТИС; ВТИС - выходные узлы ТИ и ТС; ДИ - дисплей информационный; 1 - каналы связи от нижнего уровня; 2 - каналы связи с верхним уровнем и обратные каналы к нижнему уровню
В нормальном режиме (все элементы двухмашинного комплекса ЦППС исправны) администратор ОИУК назначает одну из мини-ЭВМ и одну из РПТ рабочими. Телеинформация из каналов поступает в обе РПТ одновременно и обрабатывается в них идентичным образом. Обработанная информация пересылается в мини-ЭВМ и в необходимом объеме ретранслируется по каналам в ЦППС высшего уровня управления и в ЦППС соседних диспетчерских пунктов. Заданный объем ТИ, ТС через УС и ВТИС выводятся на мнемосхему и аналоговые приборы ДЩ. Часть ТИ (важнейшие параметры режима) масштабируется для автоматического вывода на цифровые приборы и подзапросу на экран диспетчерского дисплея ДИ. Программы обработки предусматривают простейшую достоверизацию ТИ по сигналам неисправности тракта передачи с автоматической заменой на ЦП недостоверного ТИ дублирующим параметром. Управление всеми или отдельными ЦП возможно и от мини-ЭВМ через РПТ. РПТ может также осуществлять формирование нескольких суммарных показателей (суммирование ТИ). Все средства отображения переключателем П1 подключены к рабочей РПТ. Псевдоизмерения и цифро-буквенная информация передаются из рабочей мини-ЭВМ в рабочую РПТ и далее в каналы межуровневого обмена.
При сбоях канальных адаптеров или всей РПТ производится автоматический перезапуск. При отказе рабочей РПТ рабочая мини-ЭВМ обнаруживает прекращение связи с ней и назначает резервную РПТ рабочей, производя следующие операции: активизирует с ней связь; переключает на нее с помощью П1 средства отображения, а с помощью П2 — обратные каналы. Квитанции передатчикам УТМ по обратным каналам посылаются только от рабочей РПТ.
Виды передаваемой информации.
Информация, циркулирующая, в СПОД, подразделяется на рабочую и служебную. К рабочей информации относятся следующие виды сообщений:
ТИ — телеизмерения текущих значений контролируемых параметров. Передача ТИ может идти в направлении ’’снизу вверх” (прямой канал) и ’’сверху вниз” (обратный канал);
ТС - телесигнализация положения коммутационной аппаратуры (передача по прямому и обратному каналам);
ТИР — телеизмерения для телерегулирования. Предназначены для ввода в ЭВМ, выполняющей функции центрального регулятора системы АРЧМ. Передача ведется по прямому каналу;
ТКР - телекоманды для телерегулирования. Передаются от центрального регулятора к регуляторам на энергообъектах по обратному каналу СПОД или по специально выделенным каналам;
ТИВ — телеизмерения по вызову. Передаются по прямому каналу в результате получения по обратному каналу команды вызова;
ТСВ — телесигнализация по вызову. Передается группа ТС по прямому каналу в результате получения по обратному каналу команды вызова;
ЦБИ — цифро-буквенная информация. Передается по прямому и (или) обратному каналу для составления суточной ведомости, межмашинного обмена данными.
Служебная информация объединяет сообщения о режимах передачи, состоянии каналов связи, маршрутизации информации, квитанции о приеме, переспросах забракованных слов и т. п.
Кодирование сообщений.
Протокол обмена информацией в СПОД см. § 5.2.
Технические характеристики ЦППС СПОД верхнего уровня.
В период с 1980 по 1983 г. все устройства телемеханики, передававшие информацию из ОДУ ОЭС в ЦДУ ЕЭС СССР, заменены двухмашинными комплексами ЦППС СПОД на микроЭВМ РПТ-70.
Объем телеинформации, принимаемой ЦППС по каналам и передаваемой в мини-ЭВМ, — до 2000 информационных байт (1 байт соответствует 1 ТИ или 8 ТС), объем телеинформации, ретранслируемой по одному направлению, — до 250 информационных байт; апертурное сжатие ретранслируемых ТИ — три группы с различным шагом апертуры (1, 2 и 3 кванта); количество ТИ, масштабируемых для отображения на дисплее или на цифровых приборах, — до 250; объем информации, выводимой на диспетчерский щит через устройство воспроизведения телесигналов (определяется возможностями устройства сопряжения УС), — до 1440 сигналов и до 180 аналоговых измерений (приборов).
Благодаря применению адаптивного метода передачи объем передаваемой оперативной информации (ТИ, ТС) в единицу времени увеличен в 3—4 раза при той же скорости передачи по каналам связи. Обеспечен межмашинный межуровневый обмен путем посылки по тем же каналам связи цифро-буквенной информации.
В ИДУ ЕЭС СССР внедрена ЦППС на микроЭВМ РПТ-70 (двухмашинный комплекс) также для системы автоматического регулирования частоты и мощности (АРЧМ). ЦППС обеспечивает прием параметров ТИР от передатчиков устройств телемеханики УТК и ТМ-512 и передачу команд ТКР к объектам телерегулирования через приемники УТК.
Основные отличия СПОД на уровне энергосистем от верхнего уровня состоят в следующем:
ЦППС СПОД дополнительно к функциям приема—передачи и ретрансляции информации выполняет функции ОИУК (микроОИУК АСДУ), обеспечивающего решение задач оперативного контроля режима энергосистем. Эти дополнительные функции необходимы для ЦДП энергосистем, на которых отсутствуют мини-ЭВМ;
число каналов связи ЦППС может достигать 50—60 (для крупных энергосистем), число направлений ретрансляции - до четырех,
в качестве периферийных станций телемеханики (ПСТ) на энергообъектах используются, как правило, устройства телемеханики различных типов. Однако на крупных энергообъектах в качестве ПСТ все в большей степени будут применяться микропроцессорные устройства, обеспечивающие более эффективное использование каналов связи и одновременно выполняющие некоторые дополнительные функции микроОИУК АСУ ТП;
предусматривается функция ТУ, особенно для энергосистем, в состав которых входят ГЭС (для ТУ пуском и остановом генераторов ГЭС).
Центральная приемо-передающая станция для энергосистем на базе РПТ-80.
ЦППС для энергосистем выполняется на базе двух микроЭВМ РПТ-80, она заменяет все УТМ, установленные на ДП. Одновременно ЦППС выполняет функции микроОИУК АСДУ. Состав технических средств аналогичен ЦППС СПОД на базе РПТ-70 и отличается лишь типом микроЭВМ (РПТ-80), наличием гибких магнитных дисков (фло- пи—диски) НГМД, АЦПУ, а также использованием трех псевдографических дисплеев типа ВДТ.
Основными функциями ЦППС энергосистем являются: прием ТИ (до 1000), ТС (до 2000) по каналам от передатчиков УТМ типа ТМ-512, TM-800, МКТ-1 и МКТ-2, УТК-1, установленных на энергообъектах; ретрансляция ТИ (до 100), ТС (до 200) в ЦППС ОДУ и ЦППС соседних ЭЭС (до трех); автоматический вывод телеинформации на мнемосхему ДЩ (ТС) и на аналоговые приборы пульта (ТИ); масштабирование ТИ (до 100), сравнение ТИ с заданными пределами, формирование суммарных параметров ТИ, отображение по запросу с клавиатуры на экране дисплеев таблиц или схем текущего режима (до 10), архивных наборов ТИ (до 10 наборов), таблиц для ввода данных суточной ведомости, таблиц для передачи цифро-буквенных сообщений в ОДУ; ввод с экрана дисплея и передача в ЦППС ОДУ данных суточной ведомости; автоматический ввод информации от цифровых частотомеров и электронных часов для отображения частоты и астрономического времени, автоматический обмен данными с мини-ЭВМ [ввод в мини-ЭВМ всех ТИ, ТС; вывод из мини-ЭВМ пседоизмерений и данных суточной ведомости (СВ) для передачи их в РПТ ОДУ].
Для энергосистем, не оснащенных мини-ЭВМ, предусмотрены дополнительные функции: ввод (ручной и автоматический), хранение в течение суток, распечатка и передача по каналу данных СВ; формирование, хранение в течение 24 ч (с дискретностью 10 мин), отображение и печать архива ТИ (до 100 параметров); обмен с помощью дисплея цифро-буквенной информацией между энергосистемой и ОДУ (режим телетайп).
Основу комплекса составляют две микроЭВМ РПТ-80 с ОЗУ 12 Кбайт, ППЗУ 48 Кбайт, набором интерфейсных модулей для подключения внешних устройств, канальными адаптерами КА (до 16) для подключения УТМ или РПТ. В нормальном режиме работы обе микроЭВМ осуществляют прием телеинформации параллельно. Одна из них, назначенная оператором ’’рабочей”, осуществляет управление средствами отображения информации, ретрансляцией ТИ, ТС и передачей данных СВ в ОДУ, обменом данными с мини-ЭВМ ОИУК энергосистемы. Вторая микроЭВМ находится в горячем резерве. Обе ЭВМ обмениваются сигналами состояния. При отказе рабочей резервная машина автоматически берет на себя ее функции (на первом этапе — вручную).
Надежность ЦППС обеспечивается: хранением программ и констант в ППЗУ; автоматическим перезапуском при сбоях как отдельных КА, так и всей микроЭВМ; взаимным резервированием двух ЭВМ; дублированием средств отображения информации (аналоговые приборы, дисплеи). Для обмена с мини-ЭВМ ОИУК каждая РПТ подключается к дуплексным регистрам или синхронно-асинхронному интерфейсу мини-ЭВМ.
Два из трех дисплеев типа ВДТ (информационные) предназначены для установки на диспетчерском пульте. Эти дисплеи используются для отображения таблиц или схем с текущими значениями ТИ и текущим положением ТС. Одна из таблиц предназначена для ввода с клавиатуры данных СВ, передаваемой в ОДУ. Таблица СВ заполняется соответствующей цифровой информацией, которая вводится в РПТ и передается на ДП ОЭС. Третий дисплей — сервисный - устанавливается рядом с РПТ и используется для отладки и проверки системы. С помощью ручного переключателя дисплеи могут подключаться к любой из двух микроЭВМ.
К январю 1988 г. ЦППС на базе РПТ-80 внедрены на ЦДП 66 энергосистем: 21 — в ОЭС Центра, 10 — в ОЭС Юга, 8 — в ОЭС Северо-Запада, 8 — в ОЭС Казахстана, 8 — в ОЭС Сибири, 6 — в ОЭС Северного Кавказа, 3 — в ОЭС Закавказья, 2 — в ОЭС Урала. В ближайшие годы планируется оснащение аналогичными ЦППС еще 22 энергосистем.
На базе ОИК двух верхних уровней АСДУ (ЦДУ ЕЭС, ОДУ ОЭС) во ВНИИЭ разработана структура многоуровневой телеинформационно-управляющей системы (МТИУС), охватывающей все уровни диспетчерского управления (ДУ) [28]. МТИУС состоит из двух систем: транспортной системы СПОД, объединяющей все уровни ДУ ”по вертикали”, и системы обработки и представления диспетчерской информации ДИУС (диспетчерская информационно-управляющая система) на каждом уровне ДУ.
Системы СПОД и ДИУС образуют оперативный информационно- управляющий комплекс АСДУ соответствующего диспетчерского центра.
Система СПОД является информационным стволом МТИУС. На каждом уровне ДУ устанавливаются центральные приемо-передающие станции СПОД, соединенные между собой каналами связи. Оперативная информация (ТИ, ТС) поступает на ЦППС по каналам связи от периферийных станций (ПСТ), расположенных на соответствующих энергообъектах (ЭО). На первом этапе в качестве ПСТ используются полукомплекты КП существующих УТМ. Команды ТУ от ЦППС передаются на ЭО по каналам связи обратного направления. ДИУС соответствующих уровней ДУ являются абонентами СПОД. По каналам СПОД осуществляется также передача цифро-буквенной информации (ЦБИ), которая используется, например, для составления диспетчерских ведомостей (ДВ) и межмашинного межуровневого обмена данными (ММО).
Основные функции ЦППС — транспортировка информации:
прием телеинформации (ТИ, ТС, ЦБИ) из каналов связи через канальные адаптеры от телепередатчиков различных типов УТМ;
ретрансляция телеинформации на ЦППС вышестоящего или смежного уровня ДУ с предварительной обработкой данных с целью сжатия, выявления приоритетов при передаче и т. п.;
кодовый контроль достоверности телеинформации;
формирование и передача команд ТУ и телерегулирования (ТР); вызов телеинформации по требованиям диспетчера или автоматически (при сбоях приема);
контроль состояния каналов связи и автоматический переход на исправный канал;
автоматический обмен данными с мини-(или микро) ЭВМ ДИУС (ввод в ЭВМ всех ТИ, ТС, псевдоизмерений и ЦБИ);
управление щитом и пультом (приборы, символы);
управление дисплеями (до четырех);
регистрация телеинформации на АЦПУ автоматически и по запросу; автоматический ввод в ЦППС информации от цифровых частотомеров и электронных часов для отображения промышленной частоты и астрономического времени.
Дополнительные функции ЦППС — первичная обработка телеинформации:
масштабирование ТИ (перевод кодовых значений в абсолютные); достоверизация ТИ и ТС;
контроль пределов ТИ, изменившихся ТС;
вычисление алгебраических сумм ТИ и обобщенных ТС;
усреднение, текущее сглаживание ТИ; формирование таблиц данных;
ведение архивов данных;
ведение диспетчерских ведомостей.
По информационной емкости и выполняемым функциям ЦППС подразделяется на три типа: А, В, С.
Станция типа А предназначается для относительно небольших ДП, на которых другие ЭВМ для целей ДИУС отсутствуют. При этом микроЭВМ должны иметь в своем составе гибкие магнитные диски (НМД) для выполнения дополнительных функций (ведение диспетчерских ведомостей и архивов).
Станция типа В устанавливается на ДП, имеющих выделенные ЭВМ (обычно мини-ЭВМ) для задач ДИУС. При этом производится первичная обработка для части объема телеинформации (примерно 10—15%), и выполняются резервные функции микроОИУК на случай повреждения мини-ЭВМ ДИУС.
Станция типа С выполняется на современных мегабайтных микроЭВМ, например СМ-1810, и совмещает основные и дополнительные функции приема и обработки в полном объеме вводимой телеинформации без использования дополнительных мини-ЭВМ ДИУС. На мини- ЭВМ при этом возлагаются функции расширенной ДИУС, связанные с решением режимно-технологических задач (оценка состояния, расчет токов КЗ, потокораспределение и т. п.).
Таблица 1.2. Информационная емкость ЦППС
Тип ЦППС | Суммарный максимальный объем вводимой телеинформации | Объем ТИ + ТС с первичной обработкой и отображением на дисплеи, байт | |
ТИ, байт | ТС, байт | ||
А1 | 160 | 320 | 200 |
А2 | 512 | 1024 | 640 |
В | 1024 | 2048 | 1280 |
С | 2048 | 4096 | 2560 |
Таблица 1.3. МикроЭВМ ЦППС СПОД
Уровень ДП | Тип ЦППС | ||
А | В | С | |
ЦДУ ЕЭС СССР |
| РПТ-80 | ВТ-32 |
ОДУ ОЭС | - | РПТ-80 | ВТ-32 |
ЦДЛ РЭУ | РПТ-80 | РПТ-80, | СМ-1810 |
ДППЭС | СМ-1800, ГРАНИТ | СМ-1800, АИСТ, ГРАНИТ | СМ-1810 |
ДПРЭС | СМ-1800, ГРАНИТ, АИСТ-РС |
|
|
В табл. 1.2 приведены ориентировочные данные информационной емкости ЦППС.
Объем ретранслируемой на высший уровень ДУ информации составляет 10—15% суммарного объема вводимой в ЦППС телеинформации. Объем АЦИ — один блок (250 байт).
Каналы связи, связывающие ЦППС различных уровней ДУ, подключаются через канальные адаптеры (КА), входящие в состав ЦППС по схеме точка—точка.
Каждый КА рассчитан на подключение до четырех основных и четырех резервных дуплексных каналов, передающих информацию от однотипных передающих устройств (в том числе устройств телемеханики). Переход с основного канала на резервный осуществляется автоматически.
Число канальных адаптеров: для ЦППС А — до 8; для ЦППС В и С — до 16.
Скорости передачи телеинформации по каналам связи выбираются из ряда: 50, 100, 200, 600, 1200 бит/с. Средняя скорость по всем каналам не должна превышать 200 бит/с.
ЦППС СПОД реализуются на микроЭВМ или микропроцессорных УТМ.
Распределение рекомендуемых типов микроЭВМ и микропроцессорных УТМ по уровням ДУ приведено в табл. 1.3.
На энергообъектах в качестве периферийных станций СПОД (ПСТ) могут устанавливаться УТМ (полукомплекты КП), выпускаемые-отечественной промышленностью (МКТ, УТК, ТМ-512, ТМ-120М и др·), программируемые микропроцессорные устройства телемеханики типа АИСТ-КП, АИСТ-КП-РС, а также непрограммируемый (неинтеллектуальный) аппарат КП ГРАНИТ.
Требования надежности функционирования ЦППС СПОД обеспечиваются:
резервированием функций ЦППС в двухмашинном комплексе микроЭВМ с автоматическим переключением на исправно работающую микроЭВМ;
резервированием каналов связи приема и передачи телеинформации с автоматическим выбором исправного канала;
перераспределением функций обработки телеинформации: при выходе из строя мини-ЭВМ ДИУС функцию обработки для основных параметров ТИ—ТС (10—15% полного объема обработки телеинформации) берет на себя ЦППС В;
тестированием всех основных элементов комплекса СПОД и протоколированием результатов.
Система ДИУС представляет собой комплекс технических средств и программного обеспечения, предназначенных для оказания информационной и вычислительной помощи и выдачи рекомендаций (советов) диспетчерскому персоналу по оперативному ведению режима, а также решения ряда технологических задач, связанных с оперативным ведением режима в нормальных и аварийных условиях.
Основными функциями ДИУС, общими для всех уровней ДУ, являются:
оперативная обработка телеинформации и данных диспетчерской ведомости*;
ведение архивов оперативной информации, данных ДВ и нормативно-справочной информации;
организация диалога пользователя с ЭВМ, в том числе редактирование данных;
отображение информации автоматически и по запросам на терминалах различного вида (дисплеи, табло, АЦПУ и т. д.);
решение комплекса технологических задач, состав которых определяется уровнем ДУ и характеристиками контролируемых процессов;
построение экспертных систем и тренажеров.
*Функция оперативной обработки телеинформации распределяется между микроЭВМ СПОД и мини-ЭВМ ДИУС. С увеличением производительности микроЭВМ задачи оперативной обработки телеинформации все в большей степени переносятся на средства СПОД.
На верхних уровнях ДУ (РЭУ и выше) в состав режимно-технологических задач включаются:
комплекс задач оценивания состояния;
прогнозирование нагрузки;
выработка советов диспетчеру в текущем и перспективном режимах; автоматическое регулирование частоты и активной мощности; контроль за потреблением мощности и электроэнергии; экспресс-рассчеты режимов работы энергосистем;
задачи режимных тренажеров;
обмен информацией с ’’большими” ЭВМ вычислительного комплекса АСДУ.
На нижних уровнях ДУ (РЭС, ПЭС) в состав режимно-технологических задач ДИУС включаются задачи оперативного регулирования напряжения в узловых точках сети, управление нагрузкой, определение мест повреждения в электрических сетях и др.
Технической базой ДИУС являются, как правило, мини-ЭВМ типов ЕС-1011, СМ-1420 либо (на нижних уровнях ДУ) мощные микроЭВМ (СМ-1810, ВТ-32 и т.п.).
Увеличение режимно-технологических задач и переход от только информационных к информационно-вычислительным функциям требует расширения базы данных и привлечения дополнительных вычислительных мощностей для повышения общей производительности системы. Отсюда возникает необходимость использования распределенного банка данных (РБД) и межмашинного обмена данными между ЭВМ, входящими в ОИУК одного уровня ДУ, а также межуровневого обмена данными между ЭВМ смежных уровней.
Наиболее полно отвечает требованиям межмашинного обмена между ЭВМ, входящими в ОИУК одного уровня, принцип построения многомашинных комплексов на базе локальной вычислительной сети (ЛВС) с использованием моноканала, объединяющего все ЭВМ, входящие в ЛВС. ЛВС является наиболее распространенной современной системой, позволяющей сравнительно простыми средствами обеспечить:
высокую надежность обработки информации за счет децентрализации функций и резервирования;
возможность расширения вычислительных мощностей за счет подключения к моноканалу дополнительных микро (мини) ЭВМ, дисплеев персональных ЭВМ и т. п.;
возможность использования ЭВМ различных типов, этапность развития. Дальнейшее расширение вычислительных мощностей достигается межуровневым обменом данными между ЭВМ смежным уровней.
ЭВМ, входящие в ДИУС смежных уровней ДУ, попарно связываются друг с другом каналами связи прямого обмена (КПО). Обмен информацией между ДИУС осуществляется по структуре точка-точка, выход на канал КПО имеет только одна из ЭВМ ДИУС данного уровня (не обязательно одна и та же).
Каналы КПО должны быть достаточно высокоскоростными для обеспечения эффективного функционирования многоуровневой ДИУС (несколько килобит в секунду).
Типовые конфигурации технических средств в составе МТИУС
В зависимости от уровня ДУ и объемов обрабатываемой телеинформации можно выделить ряд типовых структур ОИУК АСДУ: А, В и С.
Комплексы типа ОИУК—А построены на базе двух микроЭВМ (типов РПТ-80, СМ-1810 или УТМ ГРАНИТ) и предназначены в основном для применения на нижних уровнях управления (малые и средние ПЭС, РЭС).
Для микроЭВМ комплексов ОИУК—А обязательно наличие НМД. В зависимости от типа используемой ЭВМ поддерживается от двух до шести дисплеев, количество обрабатываемых ТИ — до 500, количество ТС - до 1000.
Комплексы типа ОИУК-В построены на базе одной или двух мини- ЭВМ типа СМ-1420 и двух предвключенных микроЭВМ типа РПТ-80 или СМ-1800 или УТМ типа ГРАНИТ или АИСТ. Эти комплексы предназначены для использования в крупных ПЭС, малых и средних РЭУ.
Для комплексов ОИУК—В необходимо наличие внешней памяти не менее 30 Мбайт; поддерживается до 16 дисплеев, количество обрабатываемых ТИ — до 1000, сигналов ТС — до 2000. Объем оперативной памяти в ЭВМ СМ-1420 — до 2 Мбайт, в микроЭВМ — не менее 64 Кбайт.
Для обеспечения функций управления средствами коллективного отображения, а также резервирования мини-ЭВМ микроЭВМ в составе ОИУК—В должна выполнять полную обработку части телемеханических параметров (примерно до 10% общего числа ТИ).
Комплексы типа ОИУК—С построены на базе одной или двух мини- ЭВМ типа СМ-1420 или ЕС-1011 и двух микроЭВМ типа СМ-1810 или ВТ-32. Эти комплексы предназначены для использования в крупных РЭС и ОДУ. Отличительной особенностью комплексов является возможность построения моноканальной ЛВС для расширения функциональных возможностей системы.
Для комплексов ОИУК—С необходимо наличие внешней памяти до 50 Мбайт; поддерживается до 24 дисплеев, количество обрабатываемых ТИ — до 2000, ТС — до 4000. Объем оперативной памяти мини- ЭВМ — не менее 2 Мбайт.
Для всех трех основных конфигураций комплекса должны быть обеспечены как возможность подключения резервных устройств, так и несколько уровней деградации — программное обеспечение должно продолжать функционировать, выполняя меньший объем функций. При деградации комплекса допускается ручной переход с одного уровня на другой.
Во всех комплексах должна предусматриваться возможность тестирования всех основных элементов комплексов как в целом, так и автономно.
АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ РАСПРЕДЕЛИТЕЛЬНЫХ ЭЛЕКТРОСЕТЕЙ (АСДУ PC)
Создание АСДУ PC является одной из важнейших задач автоматизации управления электроснабжения потребителей электроэнергии.
Основная цель АСДУ PC — повышение надежности и качества электроснабжения потребителей и снижение потерь при транспортировке электроэнергии. Если на верхних уровнях ДУ (ЦДУ ЕЭС СССР, ОДУ ОЭС, ЦДП РЭУ) проблема создания АСДУ в основном решена, то автоматизация управления распределительными электросетями 220- 10 кВ практически находится в зачаточном состоянии.
Основная специфика АСДУ PC:
- массовый характер объектов АСДУ (общее число ДП ПЭС и ДП РЭС на 1.01.86 г. составило 2804, понизительных ПС 20 кВ и выше - свыше 28 540); в этих условиях первостепенное значение при выборе аппаратуры для АСДУ приобретают экономические факторы;
- отличие режимно-технологических задач в АСДУ PC от задач верхнего уровня. К специфическим задачам АСДУ PC, в частности, относятся: контроль и управление электропотреблением в соответствии с установленными лимитами; автоматическое управление и телеуправление режимами работы PC с целью поддержания необходимого уровня напряжения, обеспечения бесперебойности питания потребителей, отыскания и ликвидации повреждений и т. п.;
- разнообразие типов и конфигураций каналов связи для передачи телеинформации: каналы по ВЛ при многоточечной радиальномагистральной структуре в распределительных сетях 35—220 кВ, каналы тональной частоты, наложенной на сеть 6—10 кВ, радиоканалы УКВ при многоточечной радиальной структуре и т. п.;
- низкий уровень эксплуатации средств управления и как следствие — повышенные требования к надежности аппаратуры, большой процент управляемых и контролируемых объектов без обслуживающего персонала;
- тяжелые климатические условия на энергообъектах (неотапливаемые помещения, установка на открытом воздухе, например в сетях 6—10 кВ).
Организация АСДУ PC планируется в рамках концентрации МТИУС (см. § 1.3). Диспетчерское управление распределительными электросетями (220—10 кВ) осуществляется с ДП ПЭС и ДП РЭС.
В ДП ПЭС входят шесть—восемь подчиненных ему ДП РЭС.
На ДП ПЭС и ДП РЭС устанавливаются центральные приемо-передающие ЦППС типов А, В или С в зависимости от объема обрабатываемой информации и наличия выделенной ЭВМ (микро или мини) для решения режимно-технологических задач. В качестве ЦППС используются универсальные микроЭВМ с программируемыми канальными адаптерами, например типа РПТ-80, СМ-1800, СМ-1810 и др., а также пункты управления микропроцессорных УТМ: АИСТ-РС, ГРАНИТ и др. На энергообъектах 35 кВ и выше устанавливаются устройства телемеханики КП-PC: АИСТ КП-PC, КП ГРАНИТ и др.; в сетях 10(6) кВ - УТМ ТРС телекомплексов ТМРС-10 при использовании тональных каналов, наложенных на распределительную сеть 10(6) кВ, и РТС-80 при использовании УКВ радиостанций.
На рис. 1.4 представлена примерная структурная схема организации АСДУ PC. ДП РЭС через микроЭВМ ЦППС и УТМ КП—PC управляет объектами подстанций ПС 35/10 (ТУ) и получает от них информацию телеконтроля ТК (ТИ и ТС). Кроме того, через КП—PC осуществляется ретрансляция команд телеуправления (РТУ) и сигналов телеконтроля (РСТиРТИ).
В качестве каналов связи на участке ДП РЭС-ПС 35/10 используется ВЧ связь по ВЛ 35 кВ (К-35 на рис. 1.4), на участке ПС 35/10 - сеть 10 (6) кВ - канал тональной частоты (К-10).
Возможна также непосредственная связь между ЦППС ДП РЭС и объектами сети 10 (6) кВ по радиоканалу УКВ.
ДП ПЭС контролирует крупные ПС с высшим напряжением 110 (220) кВ, которые связаны с ним каналами ВЧ связи. Как правило, эти подстанции являются опорными подстанциями (ОП) для управления сетями 10 (6) кВ. ОП тоже связаны с ДП РЭС, и через них осуществляется управление объектами 10 (6) кВ - РТУ, РТС, РТИ.
В качестве каналов связи для передачи телеинформации между ДП РЭС и ДП ПЭС используется, как правило, ВЧ канал по ВЛ 110 (220) или 35 кВ, если ДП ПЭС и ДП РЭС располагаются вблизи (а часто и на территории) высоковольтных подстанций. В противном случае используются проводные телефонные каналы с уплотнением.
ЦППС на ДП ПЭС и ДП РЭС выполняют функции приема — передачи информации со всех каналов связи и ретрансляцию необходимой информации на вышестоящий уровень ДУ. Кроме того, ЦППС осуществляют обработку телеинформации (в необходимом объеме), управление средствами отображения коллективного (щиты) и индивидуального (дисплей) пользования, осуществляют регистрацию событий на АЦПУ и в зависимости от типа ЦППС решают некоторые режимнотехнологические задачи АСУ ТП, например задачу секционирования с целью уменьшения потерь в сетях, определения места повреждения, регистрации срабатывания защит и т. п.
Программируемые КА обеспечивают сопряжение ЦППС с разнотипными каналами связи и УТМ (рис. 1.5). Число обслуживаемых каналов связи, их конфигурация и типы используемых УТМ на КП определяются числом КА в данной ЦППС и их программным обеспечением.

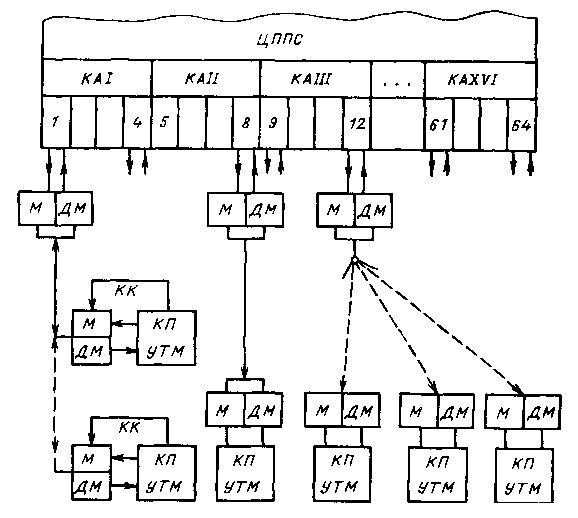
Рис. 1.4. Структурная схема АСДУ.PC:
ЦППС - центральная приемо-передающая станция (микроЭВМ); Д - дисплеи; АЦПУ - аналого-цифровое печатающее устройство; КП—PC - периферийные микропроцессорные УТМ ПС 110/35/10 кВ; ОП - опорная подстанция; С-10 - распределительная сеть 10(6) кВ; РТУ, РТС - ретрансляция команд ТУ и сигналов ТС в распределительную сеть или из нее; 7У, ТК - команды ТУ, сообщение телеконтроля ТК; ТРС—ПУ - полукомплект ПУ УТМ ТРС; ТРС-1 КП - полукомплект КП УТМ ТРС; РТС-КП - полукомплекты КП УТМ, работающие по радиоканалу; СВ - секционирующие выключатели; ЗТП - закрытые трансформаторные пункты; ЦРП - распределительные переключательные пункты; К-110 - ВЧ канал связи по ВЛ 110 кВ; К-35 - ВЧ канал связи по ВЛ 35 кВ; К-10 - тональный канал связи по распределительной сети 10(6) кВ; К-УКВ - радиоканал УКВ
Рис. 1.5. Канальные адаптеры ЦППС РЭС:
КАI. . . KAXVI — платы канальных адаптеров; 1 ... 64 — номера дуплексных каналов связи; М, ДМ - модуляторы и демодуляторы модемов; КК - канальные ключи
Так, для ЦППС на базе СМ-1800 располагается до 16 КА типа МСКТ (см. § 5.5). Каждый КА рассчитан на подключение до четырех дуплексных каналов связи с одинаковым канальным протоколом. Это означает, что все четыре канала данного КА имеют одинаковую программу приема—передачи и могут обслуживать однотипные периферийные УТМ, например КП—PC АИСТ, КП МКТ, КП ТМ-512 и т. п.
Каждый канал КА может обслуживать структуру ’’точка-точка”, ’’многоточечную радиальную” либо ’’многоточечную магистральную” структуры телекомплекса. На одном КА может быть реализована лишь одна структура: либо радиальная, либо магистральная. К каждой магистрали может быть подключено до восьми КП. При этом КП, подключаемые к общей магистрали, т. е. использующие общий для всех КП канал связи, должны обеспечивать возможность коммутации несущей частоты в общем канале (ΚΑΙ на рис. 1.5). Для этой цели служат канальные ключи (КК), которые по командам, полученным от КП, подключают соответствующий модулятор (М) к общему каналу связи.
Канальный адаптер (КАШ на рис. 1.5) при наличии соответствующей программы может обеспечивать связь ЦППС с КП устройств ТМ типа ТРС, располагаемых на энергообъектах сети 10 (6) кВ по тональному каналу ВЛ 10 кВ либо по радиоканалу УКВ. Программа обеспечивает поочередную посылку запросов и прием телеинформации со всех КП в сети 10 (6) кВ, имеющих связь с данным ДП. Предусматривается также посылка команд ТУ на выбранные КП. Всего возможно подключение до 15 КП ТРС-1 к одному двустороннему каналу КАШ.
Канальный адаптер КАП обеспечивает подключение четырех КП УТМ по структуре ’’точка—точка”.
Глава вторая
ТЕЛЕМЕХАНИЧЕСКИЕ СООБЩЕНИЯ
И ИХ ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
- ТЕЛЕМЕХАНИЧЕСКИЕ СООБЩЕНИЯ И ОБСЛУЖИВАНИЕ СЛУЧАЙНЫХ ПРОЦЕССОВ
Телемеханические сообщения - это содержание передачи телемеханических систем: сведения о значениях контролируемых параметров (телеизмерения) , о состоянии коммутационной аппаратуры (телесигнализация), приказы на включение или отключение выключательной мощности (телеуправление), сведения о величине уставок для регуляторов мощности, напряжения и т. п.
Сообщения от автоматических датчиков или от человека-оператора поступают в передающее устройство телемеханики, преобразующее сообщение в сигнал, передаваемый по каналу связи. Сигнал — это физический процесс (например, последовательность электрических импульсов) , однозначно соответствующий данному сообщению.
Сообщение — это объект передачи, а сигнал — средство передачи данного сообщения. Выбор вида сигнала определяется типом канала связи, по которому должно передаваться сообщение. Так, при электрической связи сообщение передается с помощью электрических сигналов, при радиосвязи — с помощью радиосигналов, при световой связи — световыми сигналами и т. п.
В телемеханических системах в энергетике используются, как правило, электрические и радиоканалы связи. В последнее время стали применяться световодные каналы, которые по своим параметрам, особенно в части обеспечения высокой помехоустойчивости, превосходят все применявшиеся ранее типы каналов связи.
Основными характеристиками телемеханических сообщений являются:
высокая достоверность сообщений. Передача ложных сообщений должна быть практически исключена, поскольку при этом, особенно при телеуправлении, возможны катастрофические последствия, вплоть до человеческих жертв. Достоверность сообщений оценивается вероятностью обнаружения ошибок при приеме сообщений, вероятностью исправления ошибок, вероятностью приема ложных сообщений и т. п.;
оперативность передачи сообщений. Телемеханические сообщения должны передаваться в темпе контролируемого и управляемого процесса. Режим реального времени определяет допустимые задержки и запаздывания при передаче телемеханических сообщений;
высокая эффективность использования канала связи. Телемеханические сообщения должны занимать минимальный объем канала связи, с тем чтобы по данному каналу передавать максимум сообщений. (Как известно, объем канала связи VK определяется произведением ширины частотной полосы канала ΔFΚ, времени занятости канала Тк и отношения мощностей уровней сигнал/помеха: VK = AFKTK х
высокая информативность сообщения. Каждое сообщение должно содержать новые сведения, неизвестные получателю до получения данного сообщения. Именно эти сведения и являются информационным содержанием сообщения. Информация о контролируемом процессе необходима для целенаправленного управления этим процессом.
Обслуживание случайных процессов в телеинформационных системах
Контролируемые процессы, информация о которых передается теле- информационными системами в пункты управления, являются случайными. Процесс получения информации можно рассматривать как обслуживание случайных процессов с целью извлечения из них сведений, наиболее полно отражающих контролируемый процесс. С этой точки зрения передающее устройство телеконтроля является обслуживающим устройством телеконтроля, качество обслуживания которого может характеризоваться понятиями теории массового обслуживания. Контролируемые процессы могут быть условно подразделены на дискретные и непрерывные. Дискретные процессы (например, двухпозиционная телесигнализация) характеризуются моментами появления заявок (изменение состояния объекта ТС), интенсивностью заявок, времени обслуживания заявки, длиной очереди обслуживания, потерей заявок и т. п.
Рассмотрение обслуживания непрерывных процессов (например, телеизмерение текущих значений контролируемых параметров в кодоимпульсных устройствах ТИ) может быть сведено к обслуживанию дискретных процессов.
Под обслуживанием в данном случае понимается квантование по уровню и дискретизация во времени с интервалом T0 случайного процесса у (t), в результате чего он представляется аппроксимирующей функцией U(t), преобразование значений функции U(t) в кодированные сигналы и передача соответствующих кодовых слов в канал связи (на рис. 2.1 в качестве U(t) изображена цифровая ступенчатая функция) . В моменты vj пересечения кривой у(t) соответствующего уровня квантования образуются заявки на обслуживание. Моменты начала обслуживания заявок (передача значений параметра) определяются моментом временной дискретизации процесса на соответствующем уровне квантования. Моменты возникновения и обслуживания заявок в общем случае не совпадают друг с другом, в результате чего имеют место задержки обслуживания, потери и пропуски заявок. На рис. 2.1 отмечены: отрезки si, пропорциональные длительности задержки обслуживания, вызванной периодичностью опросов T0; потерянные заявки (в предположении, что обслуживается только одна заявка, возникшая последней перед очередным моментом обслуживания); избыточные обслуживания, т. е. передача не изменившихся значений параметра; t0 — время обслуживания, т. е. время передачи кодовых сигналов, соответствующих измеряемому параметру ТИ. При обслуживании нескольких случайных процессов одним устройством возникают дополнительные задержки и потери из-за очереди на обслуживание.

Рис. 2.1. Аппроксимация и обслуживание случайных процессов:
Δ - моменты возникновения заявок V., V. о - моменты начала обслуживания t, Λtj+1 . . .; ▲ - потерянные заявки; X - избыточное обслуживание; tο - длительность обслуживания; s - задержка обслуживания; То - цикл обслуживания; i — номер канала (параметра); j — номер заявки
Таким образом, традиционные параметры систем массового обслуживания, такие как средняя длина очереди, среднее время задержки обслуживания, вероятность потерь заявок и др. могут характеризовать и процессы обслуживания в телеизмерительных системах. Однако для более полной их характеристики следует дополнительно к традиционным параметрам обслуживания ввести также точностные показатели, характеризующие качество обслуживания как отдельных заявок, так и всего контролируемого процесса в целом. Так, в момент tj будет передано значение параметра, равное 3 квантам, вместо реального значения y(tj), в момент tj+1 передается параметр U(tj+1), равный 4 квантам, вместо реального значения у (tj+1) и т. д. Показателем точности (качества) обслуживания отдельных заявок (отсчетов) может служить среднеквадратичная ошибка (СКО) е в точке t. Квадрат СКО определяет близость случайных функций в некоторый момент времени t, например в момент начала обслуживания t. или конца обслуживания (tj + t0):
![]() (2.1)
(2.1)
Для характеристики близости случайных процессов на участке длительностью Т необходимо проинтегрировать показатель точности ”в точке” (2.1) в пределах Т, т. е. перейти к интегральному показателю точности
![]() (2.2)
(2.2)
где е2 — квадрат интегральной среднеквадратичной ошибки аппроксимации (СКО).
В дальнейшем изложении выражение (2.2) положено в основу определения СКО аналого-цифрового преобразования в кодоимпульсных системах телеизмерения.
Передача ТИ—ТС
В телеинформационных системах (ТИС) используется принцип временного разделения канала связи для передачи информации от множества датчиков ТИ и ТС, сосредоточенных на данном контролируемом пункте.
Телеизмерительная информация передается кодоимпульсным методом, причем датчики ТИ опрашиваются либо поочередно, либо по определенной программе. Каждая величина ТИ передается n-разрядным кодовым словом, содержащим, как правило, 8 информационных разрядов (информационный байт). Контрольные разряды могут передаваться в составе каждого слова или в конце группы слов (кодового блока).
Кодовое слово вместо информации ТИ может нести информацию ТС. В простейшем случае каждый информационный разряд ставится в соответствие положению одного двухпозиционного объекта ТС, т. е. одно кодовое слово обычно содержит до 8 двухпозиционных сигналов ТС, образующих одну группу ТС.
Различают следующие способы передачи информации ТИ—ТС в ТИС.
а) Циклическая передача ТИ—ТС. В каждом цикле производится опрос всех датчиков ТИ и ТС и передача результатов опроса в виде последовательности кодовых слов. Информация ТИ и ТС передается в канал связи непрерывно циклически. Цикл передачи отделяется от предыдущего так называемым маркерным сигналом (или сигналом начала цикла). Как правило, любое кодовое слово может содержать информацию об одном ТИ или группе ТС. Устройства ТИС могут быть использованы и как устройства чистого ТИ (без ТС), и как устройства ТС (без ТИ).
Для передачи информации циклическим методом требуется лишь однонаправленный (симплексный) канал связи, поскольку информация непрерывно посылается с КП на ДГ1, осуществляя постоянную проверку канала связи и всего устройства в целом. Метод циклической' передачи допускает опрос и передачу информации от датчиков с разной частотой в пределах одного цикла (так называемые ТИС с индивидуальными циклами).
б) Циклическая передача ТИ и спорадическая передача ТС. При отсутствии изменения состояния объектов ТС цикл передачи включает только информацию ТИ.
При изменении положения одного или нескольких объектов ТС цикл ТИ дополняется циклом ТС, в течение которого передается состояние либо всех объектов, либо только той группы, в которой произошло изменение состояния. При этом циклы ТИ и ТС передаются до тех пор, пока с ДП на КП не придет квитирующий сигнал, подтверждающий прием ТС на ДП. Для реализации данного метода необходим двусторонний канал связи, по которому осуществляется диалог между ДП и КП. Кроме посылки квитирующих сигналов этот диалог включает в себя запросы по желанию диспетчера о состоянии ТС, а также автоматические запросы при сбоях приема информации. Спорадическая передача ТС требует введения дополнительных адресных слов, указывающих на состав передаваемой информации: адрес ТИ, адрес ТС (целиком или по группам).
в) Адаптивная передача ТИ-ТС. Передача информации по каналу связи зависит от самого контролируемого процесса: в результате анализа поведения контролируемого процесса принимается решение о необходимости его передачи в соответствующий момент времени. Существуют различные алгоритмы адаптивной передачи ТИ. Наиболее простой алгоритм — контроль выхода параметра на заданные пределы (апертуру), устанавливаемые вокруг последнего переданного значения параметра, и поочередная передача значений параметров ТИ, нарушивших апертуру. Широко распространены также алгоритм передачи наиболее отклонившегося от ранее переданного значения параметра ТИ, алгоритм с автоматическим изменением границ апертуры в зависимости от абсолютного значения ТИ и т. п.
Информация ТС передается только при изменении состояния контролируемого объекта, т. е. спорадически. При этом широко используются различные приоритеты передачи сообщений в зависимости от их важности в данной ситуации.
Адаптивные методы передачи требуют наличия адресов у каждого ТИ или группы ТС и двусторонней (дуплексной) связи между КП и ДП. Для реализации адаптивных ТИС используются микропроцессорные программируемые системы телемеханики или микроЭВМ.
Адаптивные методы передачи снижают избыточность передаваемых сообщений и тем самым повышают эффективность использования каналов связи и мини-ЭВМ ОИК АСДУ, обрабатывающих телеинформацию.
г) Передача по методу "запрос—ответ”. Информация ТИ—ТС передается с КП по запросу, посылаемому с ДП. Запросы посылаются непрерывно циклически и содержат адреса КП и характер запрашиваемой информации. Естественно, метод ’’запрос—ответ” требует двустороннего канала связи. Ответная информация может передаваться с использованием любого из перечисленных выше методов: циклически от всех датчиков ТИ и ТС; циклически только от датчиков ТИ, а от датчиков ТС — только при изменении состояния объектов; спорадически от датчиков ТИ и ТС в соответствии с принятыми адаптивными алгоритмами передачи. В последнем случае при отсутствии на КП новой информации формируется короткий ответ - квитанция запроса.
Диалог между КП и ДП обеспечивается обменом сигналов, фиксирующих начало и окончание передачи информации с данного КП. Инициатива диалога может принадлежать как КП, так и ДП: при наличии изменения информации на КП он сам может потребовать посылки запроса со стороны ДП, в результате которого новая информация будет передана на ДП.
Передача цифро-буквенной информации
Цифро-буквенная информация передается методом ’’запрос—ответ”. При наличии ЦБИ на стороне передачи (на КП или ДП) передатчик посылает кодовое слово ’’заявка ЦБИ”, означающее, что передатчик готов передать блок ЦБИ. При готовности приемника он отвечает словом готовности принять ЦБИ, в результате чего передатчик посылает блок ЦБИ. Блок ЦБИ содержит кодовые слова: ’’начало” ЦБИ, число кодовых слов в блоке, кодовые слова ЦБИ, контрольную сумму ЦБИ в блоке и ’’конец” ЦБИ. Все кодовые слова блока ЦБИ передаются, как правило, в формате кодовых слов ТИ—ТС, т. е. содержат по 8 информационных бит, которыми передаются все множества цифр, знаков и букв алфавита. Блок ЦБИ может временно прерываться кодовыми словами ТИ—ТС, имеющими более высокий приоритет. После передачи информации ТС—ТС возобновляется передача блока ЦБИ на прерванном месте.
Критерии сравнительной оценки методов передач ТИ—ТС
Критерии сравнительной оценки предназначаются для сравнения адаптивных методов передач ТИ—ТС с простейшим циклическим методом. Эти критерии представляют собой коэффициенты, равные отношению соответствующих показателей качества циклического и адаптивных методов передачи. Превышение коэффициента над единицей отражает выигрыш адаптивной системы по сравнению с циклической по соответствующему параметру сравнения. Совокупность коэффициентов образует многокритериальную систему оценок методов передачи.
Критерии сравнительной оценки подразделяются на основные и вспомогательные. Вспомогательные критерии могут быть выражены через основные.
Основные критерии. а) Коэффициент координатного сжатия
![]() (2-3) где Nц, Na — числа отсчетов непрерывного случайного процесса при циклической и адаптивной передачах, обеспечивающих заданную СКО аппроксимации δ. Поскольку при циклическом методе число отсчетов N определяется лишь постоянной частотой опросов независимо от величины контролируемого параметра, а при адаптивном методе число отсчетов при прочих равных условиях учитывает изменяемость контролируемого параметра, то Na<Nц. Однако для правомерности сравнения методов следует учитывать, что при этом должно обеспечиваться равенство СКО аппроксимации δ. Как показывают расчеты [29], коэффициент
(2-3) где Nц, Na — числа отсчетов непрерывного случайного процесса при циклической и адаптивной передачах, обеспечивающих заданную СКО аппроксимации δ. Поскольку при циклическом методе число отсчетов N определяется лишь постоянной частотой опросов независимо от величины контролируемого параметра, а при адаптивном методе число отсчетов при прочих равных условиях учитывает изменяемость контролируемого параметра, то Na<Nц. Однако для правомерности сравнения методов следует учитывать, что при этом должно обеспечиваться равенство СКО аппроксимации δ. Как показывают расчеты [29], коэффициент![]() зависит от отношения ширины апертуры Н при адаптивном методе передачи к шагу квантования h при циклическом методе передачи
зависит от отношения ширины апертуры Н при адаптивном методе передачи к шагу квантования h при циклическом методе передачи![]() .
.
При любом значении![]()
оказывается больше единицы.
Поэтому коэффициент характеризует уменьшение загрузки канала связи, передающих и приемных устройств при передаче и восстановлении ТИ параметра с заданной точностью.
б) Коэффициенты сравнения СКО передачи ТИ и запаздывания дискретных сообщений при заданной полосе пропускания канала связи ΔF:
![]()
Эти коэффициенты в случае, если они больше единицы, показывают, во сколько раз может быть снижена СКО передачи ТИ δ (или среднее запаздывание дискретных сообщений 5) при использовании адаптивных методов передачи по сравнению с циклическим методом при заданной ширине полосы пропусканий.
Коэффициенты![]() оказываются больше единицы вследствие того, что адаптивные методы при заданной полосе пропускания канала связи, т. е. при заданной скорости передачи, обеспечивают меньшее среднее время между обслуживанием реальных заявок за счет отсутствия избыточного обслуживания несущественных заявок.
оказываются больше единицы вследствие того, что адаптивные методы при заданной полосе пропускания канала связи, т. е. при заданной скорости передачи, обеспечивают меньшее среднее время между обслуживанием реальных заявок за счет отсутствия избыточного обслуживания несущественных заявок.
В качестве примера вспомогательных критериев приведем коэффициент полезного обслуживания. Обслуживание заявок в циклических системах происходит независимо от их наличия, так сказать, профилактически. Интервал обслуживания, равный времени цикла Гц, выбирается на основании априорных статистических сведений о процессе по максимальной интенсивности заявок от самого быстро меняющегося параметра. Поскольку контролируемые процессы с различными динамическими характеристиками обслуживаются с одинаковым циклом, неизбежны избыточные обслуживания, которые выражаются в том, что по каналу связи передаются значения параметров, не несущие новой информации. Если среднее число избыточных обслуживаний, приходящихся на одно полезное обслуживание, обозначить Т, то коэффициент полезного обслуживания
![]() (2.6)
(2.6)
показывает, какую часть общего числа обслуживаний составляет полезное обслуживание. Для параметров с разными динамическими характеристиками коэффициенты η различны.
При адаптивном методе передачи обслуживание производится лишь при наличии заявки, т. е. избыточное обслуживание в принципе отсутствует (rа=0). Заметим, что при условии равенства СКО передачи ТИ в циклической и адаптивных системах (δа=δц) коэффициент полезного обслуживания есть не что иное, как величина, обратная коэффициенту координатного сжатия (2.3).
Коэффициент сжатия частотной полосы канала связи при заданных СКО ТИ и запаздывании дискретных сообщений
(2-4), (2.5) где ∆F — частотные полосы пропускания канала связи при циклическом и адаптивных методах передачи, необходимые для обеспечения заданной СКО δ ТИ или среднего запаздывания дискретных сообщений 5. (При сравнении предполагается одинаковость методов модуляции сигналов в канале связи.) Коэффициенты (2.4) и (2.5) определяют выигрыш в повышении эффективности использования частотной полосы канала связи при применении адаптивных методов передачи.
Действительно,
![]()
где![]() — среднее число избыточных обслуживаний на один полезный отсчет.
— среднее число избыточных обслуживаний на один полезный отсчет.
Погрешность ТИ характеризует степень несоответствия показаний приемного измерительного прибора действительному значению измеряемой величины.
Согласно ГОСТ 26.205—83* устанавливаются классы точности каналов ТИ для устройств и комплексов при цифровом и аналоговом воспроизведении телеизмеряемых параметров из следующего ряда: 0,15; 0,25; 0,4; 0,6; 1,0; 1,5; 2,5.
Общие показатели погрешности
Погрешность канала ТИ характеризуется абсолютной погрешностью ΔΑ, относительной погрешностью δ % и приведенной погрешностью δ' %: ![]() где А„ — показания приемного прибора ТИ; А — действительное значение измеряемой величины, определяемое по показаниям образцового прибора; Aшк - диапазон шкалы измерений.
где А„ — показания приемного прибора ТИ; А — действительное значение измеряемой величины, определяемое по показаниям образцового прибора; Aшк - диапазон шкалы измерений.
Класс точности канала ТИ определяется относительной приведенной погрешностью при номинальных условиях работы всех составляющих системы телеизмерения: δ’ % при этих условиях не должно превышать значения соответствующего класса. Влияние внешних факторов на работу системы ТИ характеризуется так называемой дополнительной погрешностью. В отличие от основной погрешности, которая определяется при номинальных условиях, дополнительная погрешность связана с изменением рабочих условий — температуры и влажности окружающей среды, напряжений и частоты источников питания и т. п. Дополнительные погрешности указываются в виде приведенных погрешностей, отнесенных к единице или диапазону изменения параметра, вызывающего дополнительную погрешность. Эти погрешности могут быть соизмеримы с основными, но согласно ГОСТ 26.205—83* не должны их превышать при отклонении напряжения питания на +10 и —15% номинального значения, частоты — от 48 до 51 Гц, напряжения входного сигнала приемника - не менее чем в 2 раза (за исключением устройств интенсивности) и т. д. Допустимые пределы изменения внешних условий указываются в технических условиях на изделие, причем испытание на соответствие оговоренному классу точности должно производиться при изменении каждого внешнего параметра в отдельности (например, только либо напряжения, либо частоты питания приемника, либо температуры и т. п.).
Составляющие погрешности.
В системах ТИ измеряемый параметр подвергается многочисленным преобразованиям, причем каждый узел (аппарат) преобразования вносит свою составляющую погрешности.
Основные составляющие погрешности:
погрешность трансформаторов тока и напряжения δτρ;
погрешность первичного преобразователя (датчика) δд, погрешность передающего устройства ТИ, преобразующего сигнал датчика в сигнал, поступающий в канал связи, δпд;
погрешность канала связи, включая погрешности преобразования сигналов в канале связи и от действия помех, δк.с;
погрешность приемного устройства ТИ, преобразующего сигнал из канала связи в сигнал, поступающий в устройство обработки, δπρ;
погрешность преобразования в устройстве обработки (масштабирование, усреднение и т. π.) δο6;
погрешность указывающего (измерительного) прибора δи.п.
Если принять составляющие погрешности взаимонезависимыми случайными величинами, то суммарная среднеквадратичная погрешности ТИ представляется следующим образом:
![]() (2-7)
(2-7)
Принципы построения телеизмерительных систем и используемые ими методы преобразования сигналов определяют так называемую погрешность телепередачи δτπ, которая является характеристикой собственно телеизмерительной системы (независимо от первичных преобразователей и устройств отображения ТИ):
![]() (2.8)
(2.8)
Заводы-изготовители телемеханической аппаратуры оценивают класс точности ТИ по погрешности δтп, поскольку они не отвечают за точность датчиков, трансформаторов тока и устройств отображения и т. п. Однако для пользователя, естественно, более ценна общая оценка точности ТИ (2.7). Проблема точности ТИ на диспетчерских пунктах в целом усугубляется, кроме того, и тем, что первичные преобразователи на энергообъектах, имеющие различные погрешности, опрашиваются не одновременно, т. е. появляется дополнительная погрешность от разновременности съема показаний ТИ-параметров. Сюда же следует отнести погрешности, связанные с ретрансляцией телеизмерений в многоуровневых телеинформационных системах. Поэтому реальная погрешность ТИ различных параметров на диспетчерском пункте может существенно отличаться от δτπ, гарантированной заводом-изготовителем.
Для повышения точности ведения режима энергосистем по данным телеизмерений следует использовать все доступные методы ограничения и коррекции составляющих погрешностей ТИ. Для этого прежде всего необходимо:
периодически контролировать точность первичных преобразователей, включая проверки измерительных трансформаторов и датчиков;
контролировать погрешности, вносимые ретрансляцией ТИ, и добиваться ее минимизации путем уменьшения числа преобразований сигнала;
выявлять ’’грубые” ошибки ТИ, являющиеся следствием импульсных помех в каналах связи, и не выдавать их на вход устройств отображения и в ретранслирующее устройство;
передавать замеры ТИ на разных энергообъектах с ’’меткой времени”, с тем чтобы на ДП приводить все измерения к ’’единому времени”.
Кроме того, в современных ОИК широко используются методы оценки состояний, позволяющие рассчитывать параметры контролируемых режимов энергосистем по отдельным, в том числе и недостаточно точным, ТИ [26, 27].
Погрешность телепередачи в кодоимпульсных системах телеизмерений
Во всех современных телеинформационных комплексах для энергосистем применяется кодоимпульсный метод телеизмерений, обеспечивающий:
высокую помехозащищенность телепередачи благодаря применению помехозащищенных кодов;
возможность получения высокой точности ТИ;
отсутствие дополнительной погрешности при ретрансляции телеизмерений по методу код—код;
возможность построения комплексных кодоимпульсных устройств ТИ—ТС;
удобство цифрового воспроизведения и сопряжения с ЭВМ.
В передатчике ТИ кодоимпульсной системы осуществляется преобразование аналоговых измеряемых величин, поступающих от датчика, в кодированные сигналы. При этом непрерывный сигнал у(t) подвергается квантованию по уровню с шагом h и дискретизации по времени с шагом дискретизации То (рис. 2.2) .

Рис. 2.2. Квантование функции у (t) по уровню и дискретизация по времени: aj - Уровни квантования; h - шаг квантования; b- - пороги квантования, / = 0, ± 1, ± 2, . . .; tn - моменты дискретизации по времени; То - шаг дискретизации
В результате этого преобразования непрерывный сигнал заменяется (аппроксимируется) дискретным сигналом U(t). При аппроксимации возникает ошибка (погрешность), которая может быть представлена двумя составляющими:
погрешностью квантования по уровню — статической .ошибкой; погрешностью дискретизации по времени - динамической ошибкой. Погрешность аппроксимации в основном определяет погрешность передатчика кодоимпульсной системы.
Определим СКО аппроксимации аналого-цифрового преобразования в циклических кодоимпульсных системах с постоянным циклом замера То мгновенных значений измеряемых параметров. При этом предполагается, что все узлы схемы АЦП (орган сравнения, эталоны резисторов) обеспечивают фиксацию уровней квантования с точностью до половины шага квантования.
а) Погрешность квантования по уровню является случайной величиной ек, равной разности между фактическим значением величины в момент замера у(t) и ближайшим уровнем квантования at.. Максимальное значение статической ошибки квантования,![]()
Среднеквадратичное значение этой ошибки ек.ск находится из выражения
![]()
Рис. 2.3. Равномерное распределение погрешности квантования ек в пределах шага квантования h



Рис. 2.4. К определению СКО дискретизации по времени
Величина е численно равна среднему значению квадратов случайных площадей, ограниченных функциями у(t) и U(t) на участке дискретизации (заштрихованная площадь на рис. 2.4).
Полагая случайный процесс y(t) стационарным коррелированным процессом с нулевым средним, получим

Таким образом, при принятых допущениях абсолютная среднеквадратичная погрешность дискретизации по времени определяется следующим выражением:
![]()
Соответственно приведенное значение этой погрешности
![]() (2.10)
(2.10)
Суммарная приведенная СКО аппроксимации в передающем устройстве кодоимпульсной системы ТИ в предположении, что δκ и — независимые случайные величины, составит
 (2-11)
(2-11)
Погрешность квантования по уровню δκ характеризует статическую погрешность, в то время как погрешность дискретизации δ связана с изменением контролируемого параметра во времени, т. е. является динамической погрешностью. Введем понятие средней частоты изменения параметра λ, равное средней частоте пересечения случайным процессом у(t) границ порога квантования h . (В терминах теории массового обслуживания величина λ является интенсивностью заявок на обслуживание.) Для гауссового случайного экспоненциально-коррелированного процесса при условии![]() можно показать, что средняя частота заявок, 1/с, составляет [29]
можно показать, что средняя частота заявок, 1/с, составляет [29]
![]() (2.12)
(2.12)
Подставляя в (2.11) величину (2.12), получаем следующее выражение для СКО аппроксимации:
![]() (2.13)
(2.13)
Для быстро меняющихся параметров (у которых значение λ достаточно велико) динамическая составляемая погрешности может быть достаточно велика и нередко более значительна, чем статическая погрешность.
В табл. 2.1 приведены экспериментальные данные, полученные в результате статистической обработки данных ТИ-параметров в энергосистемах [27]. В той же таблице приводятся значения СКО аппроксимации и соотношение между динамической и статической составляющими погрешности, подсчитанные по (2.9) —(2.11) при использовании кодоимпульсных устройств телемеханики двух типов: МКТ-2 (с циклом обновления То = 9,24 с) и ТМ-512 (То = 12,16 с).
Таблица 2.1. Экспериментальные данные к расчету динамической составляющей СКО

Расчетная скорость передачи в обоих случаях составляет 50 Бод, расчетное число каналов 32,число уровней квантования N=256.
В соответствии с данными табл. 2.1 динамическая составляющая СКО может значительно превосходить статическую составляющую. Так, при измерении межсистемного перетока мощности отношение δ /δ составляет 3,65 для МКТ-2 и 4,19 для ТМ-512.
При увеличении скорости передачи динамическая составляющая уменьшается. Однако, как показывают расчеты, даже при скоростях 600 и 1200 Бод динамическая составляющая остается соизмеримой со статической (δд/δк = 1,0 и при 600 Бод и 0,71 и 0,8 при 1200 Бод для МКТ-2 и ТМ-512 соответственно).
Погрешность аппроксимации с учетом запаздывания и помех при передаче
От момента отсчета параметра ТИ передающим устройством до момента его фиксации приемным устройством проходит определенное время — время запаздывания t3. Наличие запаздывания приводит к увеличению СКО аппроксимации благодаря тому, что значение измеряемого процесса y(t) в момент воспроизведения отсчета может существенно отличаться от замеренного передатчиком отсчета.
Величина t3 включает в себя время задержки (от момента отсчета до момента начала передачи), время передачи кодового слова t0 данного параметра (включая запаздывание в канале связи) и время проверки правильности приема и фиксации отсчета на выходе приемного устройства. В зависимости от методов формирования и фиксации сигналов в системе ТИ и протяженности канала связи значение t3 и соотношение между его составляющими могут быть весьма различными.
Можно достаточно строго доказать [29], что при некоторых допущениях учет времени запаздывания при определении СКО сводится к увеличению длительного интервала дискретизации на величину 2t3.
Помехи в канале связи приводят к искажению принимаемых сигналов. Если искажения обнаруживаются защитой, то принимаемые сообщения бракуются приемником. В циклических системах забракованный параметр ТИ появляется на выходе в приемном устройстве на следующем цикле передачи (если и этот цикл не будет содержать обнаруживаемой ошибки). Если же помеха повредит сообщение и во второй раз, то значение параметра ТИ зафиксируется в приемном устройстве лишь после третьего цикла и т. д. Таким образом, длительность цикла Tц восстановления отсчета на приемной стороне становится случайной. Если через Роб обозначить вероятность обнаруживаемых ошибок при приеме данного параметра ТИ, то Тц принимает значение То с вероятностью (1 — Роб)> значение 2Т0 — с вероятностью Роб (1 — -Роб)···, значение iТ0 — с вероятностью Р (1 — Роб) и т. д. Средняя длительность цикла восстановления Тц равна
Подставив в (2.13) вместо Тц его среднее значение (2.14), получим CKO аппроксимации с учетом действия помех:
![]()
Если к тому же учесть время запаздывания t3, то окончательно получим СКО телепередачи
 (2.15)
(2.15)
Таким образом, из-за наличия помех, обнаруживаемых приемным устройством, и запаздывания передачи возрастает динамическая, а следовательно, и общая погрешность телепередачи. Не обнаруживаемые же ошибки (с вероятностью Рпож) приводят к ложным показаниям ТИ. Однако при этом следует иметь в виду, что в современных кодоимпульсных системах величина Рпож весьма мала. Поэтому достаточно существенные ошибки показаний ТИ чаще всего являются следствием неисправности действия передатчика либо кодовых защит приемного устройства, а не действия помех в канале связи.
Расчетная погрешность телепередачи
Полученные погрешности аппроксимации соответствуют идеальным условиям работы АЦП в передающем устройстве: зона нечувствительности нуль-органа не превышает половины кванта, эталонные резисторы идеальны, работа схемы АЦП не зависит от напряжений питания и сопротивлений нагрузки и т. п. В реальных АЦП максимальная погрешность квантования по уровню может достигать целого кванта, т. е. в 2 раза превосходить статическую погрешность идеальной аппроксимации. Поэтому в практических расчетах статическую погрешность с определенным запасом следует принимать равной удвоенному значению (2.9), т. е.![]() .
.
При этом расчетное значение СКО телепередачи с учетом (2.15) определяется следующим образом:
![]() (2.16)
(2.16)
Многоканальные ТИС с постоянным циклом
В многоканальных ТИС с постоянным циклом передачи Тц все параметры опрашиваются и передаются циклически через равные промежутки времени То = Тц. С увеличением числа контролируемых параметров длительность цикла увеличивается, что приводит к увеличению динамической погрешности ТИ и времени запаздывания передачи дискретных заявок, являющихся следствием возникновения ТС или редких изменений контролируемых процессов — так называемых ’’толчков” параметров.
Наибольшей погрешностью обладают наиболее быстро меняющиеся параметры. Поэтому, чтобы погрешность всей системы ТИ не превысила допустимую погрешность δДОП, время цикла приходится выбирать по самому быстро меняющемуся параметру (имеющему максимальное значение λ = λ ).
Решая (2.13) при![]() относительно То, получаем
относительно То, получаем
![]() (2.17)
(2.17)
Таким образом, увеличение частоты изменения параметра при заданной точности передачи требует уменьшения цикла передачи, что связано с увеличением скорости передачи сигналов по каналу связи, т. е. с увеличением ширины полосы пропускания канала связи. С другой стороны, медленно меняющиеся параметры (с малой величиной λ) при этом обслуживаются чаще, чем это необходимо из условия обеспечения заданной точности. Возникающие при этом избыточные обслуживания обусловливают неэффективное использование канала связи.
Другим ограничением при выборе То является обеспечение заданного времени задержки передачи дискретного изменения параметров Sдоп, среднее значение которого равно![]() ,
,
т. е.
![]() (2.18)
(2.18)
Из условий (2.17) и (2.18) должно быть выбрано наименьшее значение То, обеспечивающее заданные величины δДОП и δДОП. Естественно, что обеспечение меньшего значения То требует при прочих равных условиях большей скорости передачи сигналов. Более рациональными с точки зрения эффективности использования канала связи являются многоканальные системы с индивидуальными циклами, учитывающими статистику изменения параметров ТИ [6]. В таких системах обеспечиваются индивидуальные циклы передачи (Тоi) параметров ТИ, значения которых обратно пропорциональны частотам изменения измеряемых параметров. Применение систем с индивидуальными циклами позволяет выравнивать СКО передачи для всех параметров ТИ (путем уменьшения СКО для быстро меняющихся параметров и соответственного увеличения СКО для медленно меняющихся) и тем самым уменьшать требуемую полосу пропускания канала связи при заданной СКО системы ТИ. Другим преимуществом многоканальных ТИС с индивидуальными циклами является ограничение заданного запаздывания Sдon для части параметров ТИ или передачи группы дискретных сигналов ТС. Выделяя для этих параметров индивидуальный цикл Т , ограничиваем среднее запаздывание передачи дискретных изменений (или сигналов ТС) значением 0,5TOs.
Реализация многоканальных ТИС с индивидуальными циклами не представляет труда.
Недостатком системы с индивидуальными циклами, как всякой системы, построенной на основании априорных статистических зависимостей, является ухудшение характеристик системы при отклонении реальных контролируемых процессов от среднестатистических.
Система сбора информации, необходимой для оперативного управления режимами энергосистем, имеет многоуровневую структуру, соответствующую иерархической структуре диспетчерского управления. На энергообъектах - источниках информации - устанавливаются передатчики (ПД) кодоимпульсных устройств телемеханики либо терминалы микроЭВМ, производящие опросы датчиков ТИ и ТС и передающие информацию в кодовой форме на диспетчерский пункт нижней ступени управления ДП0 (рис. 2.5). Это может быть ДП предприятий электросетей либо центральный ДП энергосистемы - в зависимости от подчиненности энергообъекта. На ДП0 информация от приемников УТМ ПР поступает в систему обработки и отображения телеинформации СОТ. Часть информации, необходимой для диспетчеров высших ступеней, ретранслируется на ДП1, ДП2 и т. д. путем опроса приемных УТМ передающим УТМ соответствующего уровня. Если на ДП установлена центральная станция ЦСТ на микроЭВМ, то она осуществляет функции приема и ретрансляции, а также ввода информации в ЭВМ ОИК АСДУ. Однако суть процесса ретрансляции телеинформации на следующую ступень диспетчерского управления не зависит от того, используются ли для ретрансляции УТМ или ЦСТ.
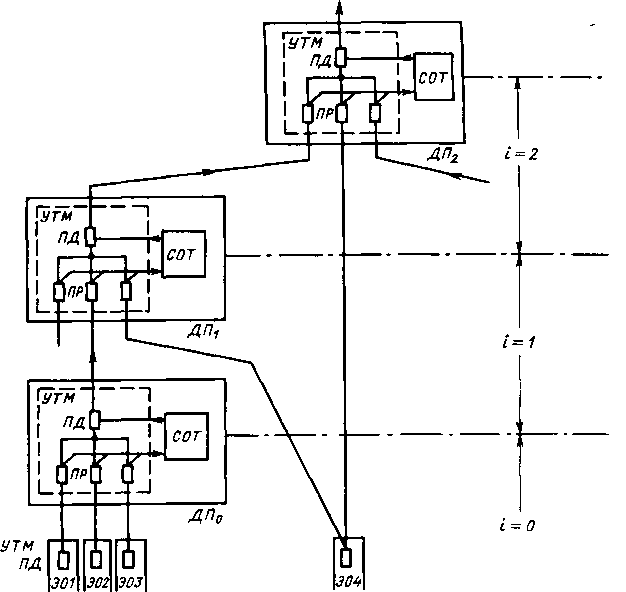
Рис. 2.5. Структура многоуровневой системы передачи информации:
УТМ - устройства телемеханики; ПД - передающее УТМ; ПР - приемные УТМ; ЭО - энергообъекты; СОТ - система обработки и отображения телеинформации
С ростом числа ступеней ретрансляции i увеличиваются погрешность передачи ТИ и время запаздывания дискретной информации, а также уменьшается надежность поступления информации на высшие уровни управления. Поэтому число ступеней ретрансляции обычно не превышает двух-трех. Для наиболее ответственных ЭО организуется прямая передача на соответствующие ДП (на рис. 2.5 показан один из таких объектов ЭО4). Однако организация прямых каналов связи сопряжена с существенными затратами и не всегда осуществима.
Для уменьшения суммарной погрешности передачи в многоуровневых системах ретрансляция должна осуществляться по методу код- код, т. е. кодовое значение ТИ предшествующего уровня является исходным для кода ТИ следующего уровня (без дополнительных преобразований код—аналог, аналог—код). При этом предполагается, что число информационных разрядов кода при ретрансляции ТИ остается одинаковым, во всяком случае оно не меньше, чем на исходном уровне. При соблюдении этих условий можно утверждать, что погрешность ТИ с ростом числа уровней ретрансляции увеличивается лишь за счет динамической составляющей погрешности, обусловленной повторными дискретизациями по времени цифровых эквивалентов значений передаваемых параметров в пунктах ретрансляции.
Сложные двоичные сигналы
В современных телемеханических системах применяются различные импульсные последовательности для передачи двоичных кодов. Эти последовательности состоят из элементарных двоичных сигналов, определенным образом связанных друг с другом. Наличие этих связей обусловливает повышение помехоустойчивости сигнала в целом.
На рис. 2.18 представлены некоторые из двоичных последовательностей, принятых различными фирмами в качестве стандартных. В импульсной последовательности (рис. 2.18, а) для передачи двоичного кода используется импульсный признак ”да—нет”: 1 передается наличием импульса, 0 — его отсутствием. Такие сигналы именуются беспаузными (поскольку разделительные паузы между 1 и 0 отсутствуют) , либо ’’без возврата к нулю” — NRZ. Элементарные сигналы в данной двоичной последовательности взаимонезависимы, поэтому для определения помехоустойчивости двоичного сигнала в целом можно воспользоваться рассмотренными выше методами определения вероятностей переходов 1↔0. Использование NRZ-сигналов ограничивается наличием постоянной составляющей при большом числе следующих подряд ’’единиц” или ’’нулей”, что отрицательно сказывается на прохождении сигналов через разделительные трансформаторы.
Для устранения этого недостатка применяют сигнал с ’’чередующейся инверсией знака” (рис. 2.18, б). Сигнал 0 передается чередующимся высоким потенциалом (положительным или отрицательным), а сигнал 1 — нулевым уровнем. Чтобы исключить постоянную составляющую, передатчик после пяти 1 подряд вставляет 0 (процедура бит-стаффинга). Приемник при декодировании изымает вставленный 0. Благодаря применению чередующейся полярности импульсов для передачи 0 помехоустойчивость такого сигнала повышается, однако увеличивается сложность приема сигналов и уменьшается его плотность за счет бит-стаффинга.
На рис. 2.18, в представлен сигнал с дискретной широтно-импульсной модуляцией ДШИМ (DPLM). Сигналы 0 и 1 отличаются друг от друга длительностью между переходами от высокого уровня к низкому и наоборот. На рисунке показано, что нуль соответствует длительности Г, а единица — 3t. Возможны и другие соотношения. Характерной особенностью сигналов ДШИМ является то, что рядом стоящие сигналы всегда имеют разное качество: если предшествующий сигнал имеет высокий потенциал (импульс), то следующий сигнал — низкий (пауза). Благодаря этому такой сигнал может быть отнесен к ’’сменно-качественным” сигналам (см. § 3.5). Число переходов в кодовом слове всегда постоянно, хотя его длительность может быть различна.
Постоянство числа фронтов в ДШИМ может использоваться для самосинхронизации генераторов (пошаговая синхронизация).
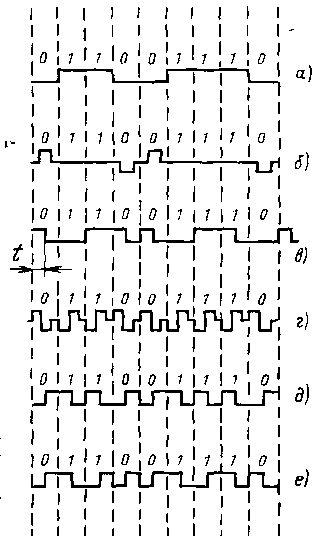
Рис. 2.18. Импульсные последовательности при передаче двоичных кодов:
а - беспаузный двоичный сигнал (NRZ); б - чередующаяся инверсия полярности 0; в - дискретная широтноимпульсная модуляция (ДШИМ); г - биполярная модуляция; д - сигнал ’’Манчестер II” (PROWAY); е - сигнал ”диф. Манчестер” (IEEE-802)
Помехоустойчивость сигналов с ДШИМ рассматривается в § 3.5.
На рис. 2.18, г представлен сигнал с биполярной модуляцией. В то время как рассмотренные выше импульсные последовательности имеют один элементарный сигнал на бит, при биполярной модуляции бит делится на три элементарных сигнала: 0- передается двухполярным сигналом ”+”, 1 — двухполярным сигналом
Сигналы разделяются пробелом длительностью 1/3 бит. Для образования ложного бита необходимо инвертирование полярностей элементарных сигналов в течение бита при сохранении неизменной длительности разделительного пробела. Такая инверсия маловероятна, поэтому помехоустойчивость сигналов с биполярной модуляцией достаточно высока. Однако из-за наличия разделительных интервалов сигнал малоэффективен с точки зрения плотности бита.
На рис. 2.18, д и е представлены импульсные двоичные сигналы, получившие в зарубежной практике название ’’Манчестер”. Их отличительной чертой является то, что переходы с высокого потенциала на низкий и наоборот всегда располагаются посередине бита, причем число этих переходов в последовательности всегда постоянно. Последнее обстоятельство используется для самосинхронизации генераторов приемника и передатчика. В сигнале Манчестер II (рис. 2.18, д) бит 0 соответствует переходу с низкого уровня на высокий, бит 1 — переходу с высокого уровня на низкий. Этот сигнал в отечественной практике носит название корреляционного кода или кода с двойными коррелированными символами. Для инверсии бита необходимы одновременные переходы 0 → 1, 1 → 0 в пределах одного бита, что маловероятно. Помехоустойчивость такого сигнала рассматривается в § 3.4.
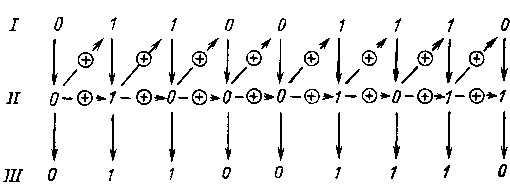
Рис. 2.19. Прямое и обратное преобразование простого двоичного кода в сигнал ”диф. Манчестер”:
I - двоичный код; II - сигнал ”диф. Манчестер”; III - восстановление двоичного кода
Последовательность Манчестер II рекомендована известным стандартом PROWAY. Более поздняя публикация IEEE-802.4 рекомендует последовательность ’’дифференциальный Манчестер” (рис. 2.18, е). Сигналы этой последовательности образуются следующим образом: очередной бит ’’дифференциальный Манчестер” равен биту исходного двоичного кода плюс по модулю 2 значение предыдущего бита ”диф. Манчестер”. Так, например, двоичная последовательность 011001110 записывается сигналами ”диф. Манчестер” следующим образом: 10001011.
Преобразование сигналов из двоичной последовательности в сигналы ”диф. Манчестер” и обратное восстановление двоичной последовательности из сигналов ”диф. Манчестер” иллюстрируются рис. 2.19.
Помехоустойчивость сигналов ”диф. Манчестер” более высокая, чем сигналов Манчестер II, поскольку инверсия одного бита, требующая двукратной ошибки, с инверсией полярностей приводит к ошибке в соседнем бите, т. е. увеличивает кратность не обнаруживаемых ошибок,
В автоматизированных системах диспетчерского управления диспетчер, получая информацию о состоянии контролируемых процессов, должен принимать решения по управлению этим процессом. Например, диспетчер энергосистемы, получив информацию об аварийном отключении генератора на электростанции, должен немедленно отдать распоряжение о введении в работу резервного генератора на данной или другой параллельно работающей электростанции и т. п. Чем большей информацией обладает диспетчер в данной конкретной ситуации, тем у него больше шансов принять правильное решение по устранению ненормальностей в контролируемом процессе.
Таким образом, задача информационного обеспечения состоит в увеличении уверенности диспетчера в правильности принимаемых им решений по управлению контролируемыми объектами.
Очевидно, что управление невозможно без достоверной информации, ибо при ее отсутствии разрывается цепь обратной связи между управляющим и управляемым объектами, необходимая для рационального управления (а именно рациональное, целенаправленное управление и подразумевается под термином "управление” вообще). Процесс управления сводится в общем виде к реакции (откликам) на информацию, получаемую от управляемого объекта. В частном случае, когда речь идет о некоторых дискретных сообщениях, процесс управления состоит в принятии решений по отношению к контролируемому объекту после получения от него очередной порции информации. Информация, получаемая от контролируемого объекта, содержит сведения, способствующие увеличению вероятности принятия правильного решения при управлении. Если же информация от контролируемого объекта не поступает, а управление все-таки производится, то решение принимается на основании так называемой априорной вероятности состояния объекта, основанной на некоторых общестатистических данных от объекта, гипотезах, связанных с предшествующим опытом, и т. п.
Отношение вероятности принятия правильного решения при наличии информации к вероятности правильного решения на основе априорной информации назовем степенью уверенности принятия решения.
Увеличение вероятности принятия правильного решения при поступлении дополнительной информации может служить мерой этой информации, которую можно назвать кибернетической мерой информации.
За единицу кибернетической меры информации примем такую информацию, которая повышает степень уверенности при принятии решения вдвое.
Вероятность принятия правильного решения по управлению процессом (назовем принятие решения по управлению "событие Y”) при наличии дополнительной информации о процессе управления (наличие информации - "событие I”) может быть определена как условная вероятность события У при выполнении события Ζ. Полагая эти события взаимно независимыми, имеем в соответствии с формулой условной вероятности
![]() (2.44)
(2.44)
где Pj (Y) - вероятность принятия правильного решения при наличии информации об управляемом процессе; Р (Y) - то же на основе только априорной информации; Ργ(I) - вероятность наличия дополнительной информации при
принятии решений об управлении; Ρ(Ζ) - вероятность априорной информации об управляемом процессе.
Согласно определению степень уверенности подсчитывается следующим образом:
![]() (2.45)
(2.45)
а кибернетическая мера информации
![]() (2.46)
(2.46)
Следует отметить, что степень уверенности g может быть больше (при получении полезной информации) и меньше (при получении дезинформации) единицы. В соответствии с этим величина g может быть положительной и отрицательной. При g =2 получаем Iк=1; при g=0,5 Iк = -1.
Информационной моделью, соответствующей Iк = 1, может служить следующая ситуация. Пусть на развилке двух дорог, ведущих в пункты А и В, требуется принять решение о выборе пути, ведущем в заданный пункт (например, в пункт В). При отсутствии указателя направления с равным основанием можно выбрать любую из двух дорог и с вероятностью Р (Y) =0,5 получить правильное решение (т. е. попасть в пункт В). Если же имеется указатель направления (т. е. имеется дополнительная информация 1), то правильное решение очевидно, т. е. Р (Y) =1. Следовательно,![]() = 2, а кибернетическая мера информации от указателя
= 2, а кибернетическая мера информации от указателя![]()
Частным случаем принятия решения является определение состояния многопозиционного объекта по сигналам его состояния (ТС). При отсутствии этих сигналов (информации ТС) состояние объекта может быть охарактеризовано лишь априорными вероятностными состояниями. Так, для двухпозиционного объекта Р (ВК) - вероятность включенного состояния, Р (ОТ) - вероятность отключенного состояния. При получении ТС о реальном состоянии объекта степень уверенности в определении состояния увеличивается во столько раз, во сколько реальная информация больше априорной, как это следует из (2.45).
Рассмотрим простые примеры, иллюстрирующие увеличение вероятности принятия правильного решения при получении дополнительной информации об объекте управления (исследования).
Пример 2.1. Положим, что диспетчеру РЭС требуется принять решение об отыскании повреждения в отходящих от ПС линий сети 10 кВ и выслать на поврежденный участок аварийную бригаду. Аварию может вызвать любой из т элементов в сети.
Рассмотрим два случая:
а) диспетчер получает один общий сигнал с ПС - "авария в сети 10 кВ”;
б) все т элементов разбиты на s групп (например, по числу отходящих от шин подстанции линий). От каждой группы может передаваться телесигнал ’’Авария на линии”.
Обозначим:
Р (Y) — вероятность принятия правильного решения по определению поврежденного элемента на основании априорной информации;
Рγ (Y) - то же при наличии одного из s групповых сигналов;
Р (S) - априорная вероятность получения информации с данной линии;
Ργ (S) - вероятность получения телесигнала при аварии в зоне этой линии (т. е. достоверность группового телесигнала).
Если предположить, что все т элементов имеют равную вероятность повреждения, то в первом случае (при отсутствии информации от поврежденных объектов) для отыскания повреждения необходимо обследовать все т элементов, причем с вероятностью (Ι/m) отыскание поврежденного элемента окажется успешным (предполагается, что в поврежденном состоянии находился один из т элементов).
Следовательно, вероятность принятия правильного решения на основании априорной информации![]()
Во втором случае, получив телесигнал о повреждении объектов на одной из s линий, диспетчер должен обследовать объекты данной линии. Для простоты положим, что на каждой линии находятся к < т элементов, повреждения которых равновероятны.
Поскольку общий сигнал s объединяет к элементов, каждый из которых с вероятностью 1/m может находиться в поврежденном состоянии, вероятность того, что телесигнал придет от данной линии, составит Р (S) =к/т.
Глава третья
СТРУКТУРНЫЕ ХАРАКТЕРИСТИКИ ДИСКРЕТНЫХ СИГНАЛОВ (КОДЫ)
- КОД, ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Код — это математическая структура (закон) построения дискретных сигналов, однозначно соответствующая передаваемым сообщениям. Слово ’’код” (от латинского ’’кодекс” — свод законов) означает свод правил, законов, по которым составляются комбинации из дискретных сигналов. Каждая такая комбинация, называемая кодовой, записывается в виде последовательности, составленной из некоторых условных символов (например, цифр 0,1 ...; различных букв а, b,с... или одинаковых букв с различными показателями степени, указывающими местоположение символа в кодовой комбинации, хк, хk-1 и т. д.). Символ — это элемент кодовой комбинации. Каждому сообщению, подлежащему передаче, однозначно сопоставляется (приписывается) своя кодовая комбинация. Таким образом, код позволяет записать все сообщения на некотором общем для данного набора сообщений языке. С этой точки зрения набор символов данного кода рассматривают как алфавит, а кодовые комбинации из этих символов — как кодовые слова.
Каждое сообщение передается собственным кодовым словом. Аналогия с языковой терминологией может быть продолжена и далее: кодовые слова могут объединяться в группы — кодовые предложения или фразы, которые образуют кодовые блоки, объединенные некоторой общностью (например, способом защиты от помех всех кодовых слов, входящих в блок), и т. д.
Каждому символу (букве алфавита) соответствует элементарный дискретный сигнал, обладающий определенным селективным признаком (амплитудой, частотой, длительностью и т. п.). Число селективных признаков сигналов* должно соответствовать числу букв кодового алфавита.
Кодирование — это преобразование сообщений в комбинации из элементарных сигналов в соответствии с заданным кодом, т. е. физический процесс придания абстрактным кодовым комбинациям реальных физических признаков сигнала. Результатом процесса кодирования является кодированный сигнал — сигнал, построенный из дискретных посылок по определенному закону — коду.
Важно подчеркнуть, что код — понятие чисто математическое, не связанное с физическими характеристиками сигнала. Элементы кода — символы — существуют независимо от того, какими физическими сигналами они будут передаваться по каналу связи. Понятие код связано с канальным уровнем передачи, в то время как кодированный сигнал — с физическим уровнем (см. рис. В.2). С точки зрения такого определения кода недопустимо применение таких часто встречающихся терминов, как ’’частотный код”, ’’временной код” и т. д.
* В литературе эти признаки именуются также импульсными признаками сигналов.
Разделение понятий ’’код” и ’’кодированный сигнал” позволяет анализировать независимо структуру построения сигнала. При этом не следует смешивать понятия ’’помехозащищенность кода” и ’’помехоустойчивость кодированного сигнала”. Под помехозащищенностью кода будем понимать способность данной структуры противостоять действию ошибок (т. е. обнаруживать или исправлять ошибки). Это понятие необходимо для сравнения различных способов кодообразования при проектировании средств передачи информации. Помехоустойчивость кодированных сигналов — более широкое понятие. Оно определяет способность физического процесса, представляющего кодированный сигнал, противостоять действию помех.
Нередко можно получить более помехоустойчивый сигнал при использовании менее помехозащищенного кода и наоборот. Например, передача сообщений при использовании без избыточного двоичного кода может обладать большей помехоустойчивостью по сравнению с использованием помехозащищенного кода, если помехоустойчивость элементарных сигналов в первом случае существенно выше, чем во втором.
Общие задачи кодирования
а) Сообщения, которые передаются телемеханическими системами, носят весьма разнообразный характер; это могут быть сообщения о состоянии коммутационной аппаратуры (включено, отключено), величины измеряемых параметров (мощность, давление, расход, температура и т. д.), различные цифровые данные контроля и статистического учета (координаты движения, выработка продукции, номера оборудования). Естественно, что в пределах одного телемеханического устройства все передаваемые сообщения должны быть представлены кодированными сигналами, построенными по одному, общему для всех Или, по крайней мере, для группы сообщений закону (коду). Следовательно, общей задачей кодирования является перевод разнообразных сообщений на общий язык кодированных сигналов.
б) Необходимость в кодировании сигналов, т. е. в составлении комбинаций из элементарных дискретных сигналов по определенному математическому закону, возникает в тех случаях, когда число сообщений N превосходит число селективных качественных признаков сигналов т. В самом деле, если т=Ν, то, приписав каждому сообщению один из т признаков сигнала и посылая один элементарный сигнал (импульс) с данным признаком, можно, вообще говоря, передать все сообщения. Если же т < Ν, то для передачи всех сообщений приходится составлять комбинации из п элементарных сигналов с т признаками. Теперь уже не элементарный сигнал, а определенная комбинация из и элементарных сигналов будет выражать данное сообщение. Естественно, что число передаваемых сообщений, равное числу комбинаций из п элементов, имеющих т различных признаков, при этом резко возрастет. Закон N = f(n,m), по которому составляются комбинации, и является кодом этих сообщений.
Таким образом, одна из задач кодирования состоит в обеспечении передачи необходимого числа различных сообщений по данному каналу связи при помощи комбинирования из и элементарных сигналов с т импульсными признаками.
в) Другой, не менее важной задачей является обеспечение надежности передачи сообщений. Кодированный по определенному закону сигнал приобретает свойства обнаружения, а иногда и исправления ошибок, которые могут возникнуть в процессе передачи сигналов от передатчика к приемнику.
г) Обеспечение секретности сообщений. Применение специального кода, известного только соответствующему корреспонденту, обеспечивает секретность передачи.
д) Кодирование сигналов решает также задачу согласования параметров канала связи и сигналов: применяя тот или иной метод кодирования, удается согласовать объемы сигнала и канала связи.
Методы решения отмеченных основных задач кодирования могут быть весьма разнообразны в зависимости от конкретных условий и требований передачи сигналов. Однако эти задачи должны решаться в комплексе; кодированные сигналы должны обеспечивать передачу всей информации с необходимой степенью надежности по каналу связи с заданными параметрами.
Особенности кодирования телемеханических сообщений
Основная особенность телемеханических сообщений состоит в необходимости передачи информации в режиме реального времени и с высочайшей степенью достоверности, поскольку своевременность и надежность получаемой информации (включая и передачу команд ТУ) определяет эффективность всей системы автоматизированного (или полностью автоматического) централизованного контроля и управления крупными технологическими процессами в целом. Исходя из этого основными требованиями к системе кодирования телемеханических сообщений являются обеспечение минимальной задержки передаваемых сообщений и обеспечение высокой помехоустойчивости кодированных сигналов.
Минимальная задержка передаваемых сообщений достигается: повышением скорости передачи сигналов по каналу связи;
выбором кодовых блоков (т. е. группы кодовых слов с соответствующей защитой от помех) минимальной длины;
широко развитой системой приоритетов, обеспечивающей внеочередную посылку наиболее экстренных сообщений;
наиболее простым (коротким) диалогом между приемником и передатчиком информации.
Высокая помехоустойчивость кодированных сообщений достигается выбором помехозащищенных кодов с большим кодовым расстоянием и высокой помехоустойчивостью элементарных сигналов.
Требования обеспечения минимальной задержки и высокой достоверности сообщений при ограниченной полосе частот пропускания канала связи взаимно противоречивы. Поэтому приходится принимать решения о компромиссном удовлетворении этих требований в каждом конкретном случае.
Спецификой передачи телемеханических сообщений в энергосистемах, которые необходимо также учитывать при выборе кодовых структур сигналов, является высокий уровень помех в каналах связи, вызванных, в частности, электромагнитным влиянием тока промышленной частоты на ВЧ каналы по высоковольтным линиям электропередачи, коммутационными помехами при операциях с выключателями и разъединителями, различными режимами повреждений на ВЛ, а также сложными условиями окружающей среды (широкими диапазонами температур, влажности, напряжения питания и т. д.), в которых работают устройства телемеханики, причем часто при отсутствии постоянного обслуживающего персонала.
Основным требованием при передаче большинства телемеханических сообщений является низкая вероятность не обнаруживаемых ошибок (т. е. малая вероятность воспроизведения ложных сообщений). Особенно это относится к командам ТУ: исполнение ложной команды должно быть практически исключено, так как эта ложная операция может привести к катастрофическим последствиям (вплоть до гибели людей). Потеря сообщений тоже нежелательна, однако более допустима, особенно если сопровождается сигналом, требующим повторения потерянного (забракованного) сообщения.
Следует также считаться с возможностью образования ложных сообщений без их передачи от источника сообщений, т. е. из помех на входе приемника. Поэтому приемники УТМ при отсутствии передачи должны быть закрыты, а если это по каким-либо причинам невозможно, то коды сообщений должны обеспечивать практическую невозможность формирования сообщения из помех на входе приемного устройства.
Число используемых символов (или букв в кодовом алфавите) определяет основание кода т. По значению т коды подразделяются на двузначные (двоичные, бинарные) при т=2, трехзначные (т = 3) и многозначные (т>3). Число разрядов п в кодовых комбинациях определяет длину кода. Если длина всех кодовых слов одинакова (п = const), то код называется равномерным.
Емкость кода — число комбинаций (кодовых слов) из общего числа N = тn используемых для передачи сообщений. Эти комбинации называются рабочими Np. Закон Np=f(n,m), по которому составляются рабочие комбинации, и является кодом.
Избыточность кода, коэффициент избыточности.
Из всех возможных кодовых комбинаций N=тn для передачи сообщений используется лишь некоторая часть (Np< N). Остальные же избыточные комбинации служат для целей проверки правильности прохождения кодированного сигнала. Если вместо посланной кодовой комбинации принята кодовая комбинация, не входящая в число Np, то это означает, что в процессе передачи произошла ошибка.
Принятая искаженная комбинация анализируется. Результатом анализа может явиться сигнал ошибки (защитное действие) либо восстановление посланного сигнала (исправление ошибки). Таким образом, способность кодов обнаруживать (или исправлять) ошибки связана с их избыточностью. Избыточность кодов характеризуется коэффициентом избыточности
![]() (3.1)
(3.1)
Значение Kиз лежит в пределах 0 < Киз < 1. Код, у которого используются все возможные комбинации в качестве рабочих (Np = N), называется без избыточным непомехозащищенным кодом. Для такого кода Киз =0.
Кодовое расстояние d между двумя кодовыми комбинациями (кодовыми векторами) равно числу одноименных разрядов с отличными символами. Для двузначных кодов кодовое расстояние определяется как вес (т. е. число единиц) суммы по модулю 2 двух кодовых комбинаций. Например, d между комбинациями 0110111 и 1101010 равно 5, поскольку сумма по модулю 2 1011101 имеет вес, равный 5.
Кодовое расстояние играет важную роль при рассмотрении помехозащищенности кодов. Оно характеризует, насколько одна рабочая комбинация удалена от другой. Чем больше d, тем труднее при прочих равных условиях помехам исказить посланную комбинацию так, чтобы она превратилась в другую рабочую комбинацию, т. е. чтобы было принято ложное сообщение.
Таблица 3.1. Матрица кодовых расстояний d. .
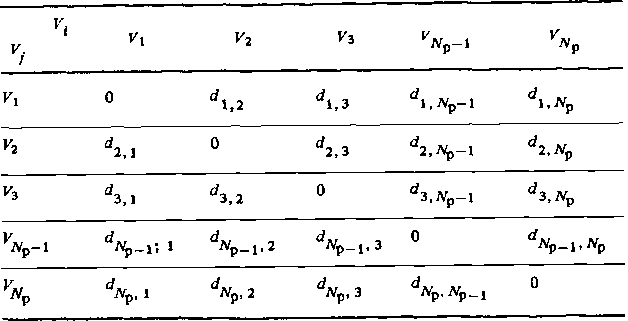
В теории помехозащищенных кодов помехи характеризуются кратностью помех, указывающей число символов кода, которые помеха способна исказить (в двузначных кодах 0 заменить 1 и наоборот). Так, однократная помеха искажает один разряд кодовой комбинации, двукратная — два и т. д.
Если вероятность однократной помехи обозначить р, то для симметричного двоичного канала без памяти вероятность двукратной помехи составит р2, трехкратной -р3 и т. д. Ясно, что при такой модели канала наибольшую опасность имеют однократные помехи, поскольку они наиболее вероятны.
Для характеристики помехозащищенности кода в целом существует понятие минимального кодового расстояния d . - минимально-
го расстояния между любыми парами кодовых векторов, входящих в данный код.
Совокупность кодовых расстояний между всеми рабочими векторами кода Nр образует матрицу кодовых расстояний (табл. 3.1). Минимальное кодовое расстояние определяется из этой матрицы:
![]()
Величина dmin характеризует минимальную кратность помехи, которая может привести к не обнаруживаемым ошибкам (т. е. к приему ложных сообщений). Так, при dmin = 1 уже однократная помеха, т. е. помеха, искажающая всего один бит в кодовой комбинации, приводит к ложному сообщению. Следует подчеркнуть, что в избыточных кодах не все искажения кратности dmin вызывают ложные сообщения.
Однако dmin характеризует ту наименьшую кратность помехи, которая достаточна для появления ложных сообщений.
Зависимость между кодовым расстоянием и кратностью обнаруживаемых и исправляемых ошибок.
Чем большим кодовым расстоянием обладает код, тем он имеет большую потенциальную помехозащищенность. Для обнаружения всех ошибок кратности до r минимальное кодовое расстояние должно быть равно
dmin=r+i· (3-2)
Выполнение условия (3.2) означает, что любая помеха кратности до r не сможет перевести одну рабочую комбинацию в другую, т. е. не сможет образовать ложного сообщения, а переводит рабочую комбинацию в область запрещенных, которые приемник может просто обнаружить и запретить их исполнение.
Существуют коды, которые позволяют не только обнаруживать ошибки, но и исправлять их и тем самым восстанавливать исходные кодовые комбинации, искаженные при передаче. Для исправления ошибок кратности s минимальное кодовое расстояние должно быть увеличено по сравнению с расстоянием, определяемым по формуле (3-2):
![]() (3-3)
(3-3)
При этом кодовые комбинации с ошибками кратности до s как бы группируются вокруг соответствующей рабочей комбинации, образуя группу кодовых векторов, удаленных от данной рабочей комбинации на меньшие расстояния, чем от любых других. Это обстоятельство и используется для исправления ошибок кратности не более s: принятая кодовая комбинация расшифровывается как рабочая, если отстоит от рабочей на расстоянии, не превышающем s.
Для исправления s-кратных и обнаружения r-кратных ошибок необходимо выполнение следующего условия:
![]() (3.4) причем r > s.
(3.4) причем r > s.
Коды, позволяющие обнаруживать (исправлять) ошибки, называются также корректирующими (самокорректирующими).
Таблица 3.2. Распределение кодовых векторов d по кодовым расстояниям А.
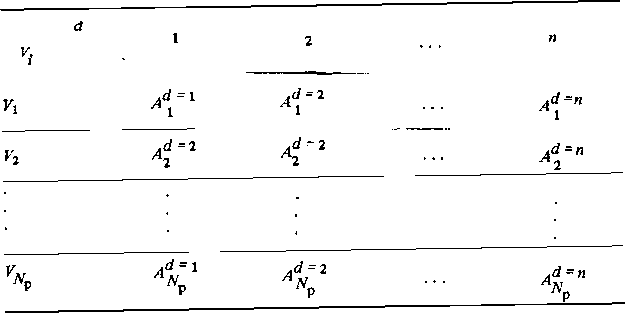
Распределение рабочих кодовых комбинаций по кодовым расстояниям.
Матрица кодовых расстояний (табл. 3.1) позволяет определить для всех рабочих векторов Vi, i = 1, 2, . . ., Np, числа кодовых векторов, удаленных от данного на расстояния d = 1,2, . . ., п. Эти числа А представляют собой распределение i -го рабочего вектора по кодовым расстояниям в ансамбле рабочих кодов (табл. 3.2). Минимальное значение d в этом распределении равно dmin, максимальное может достигать числа разрядов п (если все разряды кодовых комбинаций инверсны). Если все кодовые векторы имеют одинаковое распределение кодовых расстояний
![]()
то такой код является симметричным. Для характеристики симметричного кода, очевидно, достаточно иметь распределение![]() для одного любого кодового вектора.
для одного любого кодового вектора.
Распределение кодовых векторов по кодовым расстояниям позволяет более детально (по сравнению с известной величиной dmin) охарактеризовать потенциальную помехозащищенность кода. Зная это распределение, можно определить, от какого количества ошибок той или иной кратности защищен данный код. Для этого необходимо вычислить коэффициенты не обнаруживаемых (ложных) переходов одной рабочей комбинации в другие под влиянием помех заданной кратности.
Для простейших кодов существуют формулы для вычисления
Однако в общем случае эти вычисления производятся с помощью несложных программ на ЭВМ.
Коэффициент ложных переходов определяется следующим образом:
![]()
(3.5)
где
![]()
— число рабочих векторов, отстоящих от данного рабочего
![]()
вектора на расстоянии d;![]() — суммарное число возможных кодовых векторов той же разрядности п, отстоящих от данного рабочего вектора на расстоянии d.
— суммарное число возможных кодовых векторов той же разрядности п, отстоящих от данного рабочего вектора на расстоянии d.
Величина![]() для всех двузначных кодов определяется числом сочетаний из числа разрядов n по d:
для всех двузначных кодов определяется числом сочетаний из числа разрядов n по d:
![]()
Рабочий вектор под воздействием d-кратной помехи может перейти в множество![]() векторов, причем если он попадет в подмножество
векторов, причем если он попадет в подмножество
![]() этого множества, то будет принято ложное сообщение. Коэффициент
этого множества, то будет принято ложное сообщение. Коэффициент![]() и характеризует долю ложных переходов под влиянием d-кратной помехи.
и характеризует долю ложных переходов под влиянием d-кратной помехи.
Для симметричных кодов, как было отмечено, существует единое распределение .![]() для кода в целом. Поэтому подсчет
для кода в целом. Поэтому подсчет![]() для таких кодов производится непосредственно по выражению (3.5).
для таких кодов производится непосредственно по выражению (3.5).
Для несимметричных кодов можно определить лишь среднее значение![]() , для чего определяется
, для чего определяется![]() для каждого из Np векторов в отдельности (i=1,2,..., Np) и затем производится усреднение по всем рабочим кодовым векторам:
для каждого из Np векторов в отдельности (i=1,2,..., Np) и затем производится усреднение по всем рабочим кодовым векторам:
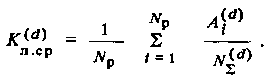 (3.6)
(3.6)
Алфавитом кодовых комбинаций могут служить цифры. Составив из цифр число и сопоставив это число с определенным сообщением, получим числовой код этого сообщения.
Системы счисления
Целое число N может быть записано в любой системе счисления в виде ряда
![]() (3-7) где т — основание системы счисления; п — количество разрядов числа; z — номер разряда; кi — разрядные коэффициенты.
(3-7) где т — основание системы счисления; п — количество разрядов числа; z — номер разряда; кi — разрядные коэффициенты.
Основание т системы счисления определяет ее название: т = 2 — двоичная система, т = 3 — троичная и т. д.
Наиболее распространены следующие системы счисления, используемые при формировании числовых кодов в машинных системах: двоичная, восьмеричная, шестнадцатеричная. Для записи чисел в двоичной системе используются всего две цифры: 0 и 1. В восьмеричной системе числа изображаются с помощью восьми цифр: 0, 1,2, 3, 4, 5, 6, 7, В шестнадцатеричной системе требуется шестнадцать знаков, в качестве которых используются десять цифр от 0 до 9 и шесть букв А, В, С, D, Е, F (табл. 3.3).
Для наиболее распространенной в обычной практике вычислений десятичной системы т = 10, к; = 0-9. В ней число, например, 249 записывается в виде ряда
(3.7) следующим образом:
![]()
Обычно принятая форма записи числа основана на записи лишь разрядных коэффициентов.
Аналогично для двоичной системы ![]()
Таблица 3.3. Запись чисел в различных системах счисления | |||
Десятичные | Двоичные | Восьмеричные | Шестнадцатеричные |
1 | 1 | 1 | 1 |
2 | 10 | 2 | 2 |
3 | 11 | 3 | 3 |
4 | 100 | 4 | 4 |
5 | 101 | 5 | 5 |
6 | 110 | 6 | 6 |
7 | 111 | 7 | 7 |
8 | 1000 | 10 | 8 |
9 | 1001 | 12 | 9 |
10 | 1010 | 12 | А |
11 | 1011 | 14 | В |
12 | 1100 | 14 | С |
13 | 1101 | 15 | D |
14 | 1110 | 16 | Е |
15 | 1111 | 17 | F |
16 | 10000 | 20 | 10 |
17 | 10001 | 21 | 11 |
18 | 10010 | 22 | 12 |
32 | 100000 | 40 | 20 |
64 | 1000000 | 100 | 40 |
100 | 1100100 | 144 | 64 |
128 | 10000000 | 200 | 80 |
256 | 100000000 | 400 | 100 |
для восьмеричной системы
![]()
для шестнадцатеричной системы
![]()
Количество кодовых комбинаций числового кода равно Ν=тп. Чем выше основание системы счисления, тем меньшее число разрядов имеет заданное число Ν, т. е. тем короче кодовая комбинация (так, из приведенных примеров видно, что для записи одного и того же числа 249 в шестнадцатеричной системе требуется два разряда, в десятичной и восьмеричной — три, в двоичной — восемь).
Наименование числовых кодов определяется системой счисления, положенной в основу их формирования.
Числовой двоичный код
Все N сообщений нумеруются порядковой последовательностью в двоичной системе счисления, образующей двоичный код этих сообщений. Двоичная система имеет ряд преимуществ, особенно в условиях машинного счета. Наличие в этой системе всего двух знаков (О и 1) как нельзя лучше соответствует двум позициям двухпозиционных элементов (триггеров), используемых в различных автоматических устройствах. Исключительное распространение, которое получила двоичная система в современной вычислительной технике, объясняется также чрезвычайной простотой арифметических действий в этой системе.
Количество кодовых комбинаций двоичного кода равно
![]()
Следовательно, для записи в двоичном коде данного числа сообщений N требуется иметь η разрядов:
![]()
где![]() - ближайшее большее целое число.
- ближайшее большее целое число.
В двоичном коде используются все возможные кодовые комбинации, т. е. Νρ = Ν. Поэтому этот код является неизбыточным и согласно (3.1) Киз=0.
Благодаря отсутствию избыточности двоичный код в принципе является непомехозащищенным; любая, даже однократная ошибка образует ложную комбинацию. Минимальное кодовое расстояние dmin = 1. Нетрудно показать, что коэффициент ложных переходов равен 1 для любого d.
Таблица 3.4. Запись десятичных чисел (0-15) числовым двоичным кодом и кодом Грея

Благодаря простоте реализации двоичные коды широко используются на практике для формирования информационной части кода. Для придания кодовым комбинациям большей помехозащищенности к информационным символам добавляются защитные символы, которые и определяют помехозащищенность кода.
В качестве простейшей защиты двоичных кодов от искажений используется фиксация нарушения количества элементов в кодовой комбинации. Для этой цели в телемеханике всегда используются равномерные двоичные коды, т. е. такие, у которых все кодовые комбинации имеют одинаковую длину.
Другие виды защиты двоичного кода будут рассмотрены ниже.
Двоичный код Грея.
В кодоимпульсных телеизмерительных устройствах, в которых используется преобразование угла поворота в код, применяется специальный двоичный код, получивший наименование кода Грея. Отличительной, особенностью этого кода является то, что соседние кодовые комбинации, расположенные в порядке возрастания номеров, отличаются лишь в одном разряде. В простом двоичном коде это правило не соблюдается: например, при переходе от комбинации № 3 к № 4 единицы меняются во всех трех разрядах, от № 7 к № 8 — во всех четырех и т. д. Двоичный код Грея (первые 16 комбинаций) представлен в табл. 3.4.
Комбинации этого кода образуются из соответствующей комбинации простого двоичного кода путем суммирования ее по модулю 2 с этой же комбинацией, но сдвинутой на один разряд вправо. При этом младший разряд суммы отбрасывается.
Преимущество применения кода Грея состоит в том, что при преобразовании аналоговой величины (угла поворота, механического перемещения и т. п.) в код, например с помощью кодовой маски, погрешность преобразования не превышает погрешности дискретности, т. е. единицы младшего разряда, так как при переходе от одного уровня дискретности к другому меняется единица только в одном разряде. При применении же простого двоичного кода ошибка в фиксации старшего разряда на границе двух дискретных уровней приводит к ошибке равной 50% шкалы измерения.
Обратное преобразование кода Грея в двоичный код производится, начиная со старшего разряда, по следующему правилу. Сначала переписывается без изменения старший разряд преобразуемой комбинации. Значение каждого последующего разряда двоичного кода находится путем сложения по модулю 2 этого разряда в коде Грея с предыдущими, более старшими разрядами. Например, комбинация кода Грея 1001 соответствует следующей комбинации двоичного кода: старший разряд 1, следующий разряд 0 + 1 =1,0 + 0+ 1= 1, 1 +0 + 0+ 1 =0, т. е. 1110.
Код Грея является без избыточным (Киз =0, dvin =1), поэтому в принципе это не помехозащищенный код. Однако если допустить, что каждое последующее сообщение отличается от предыдущего не более чем на ± 1 (такие сообщения, например, характерны для циклических телеизмерений медленно меняющихся процессов), то закономерность кода Грея (отличие каждой соседней комбинации не более чем в одном разряде) может служить основой выявления ошибок в принятом сообщении: комбинация считается принятой правильно, если она отличается от предшествующей не более чем одним разрядом, все другие комбинации бракуются. При таких условиях код Грея можно считать помехозащищенным от всех ошибок кратности более 1.
Двоичный без избыточный код с кодовым расстоянием d> 2 между соседними кодовыми комбинациями.
Идею построения без избыточных кодов с кодовым расстоянием d > 1 между соседними кодовыми комбинациями предложил профессор Г. М. Бутаев, который разработал синтез и анализ этих кодов вплоть до d < 5 [21]. Эти коды целесообразно использовать для циклических телеизмерений медленно- меняющихся параметров. Рассмотрим без избыточный код с кодовым расстоянием d > 2 между соседними кодовыми комбинациями.
Этот код может быть синтезирован из двоичного числового кода по правилу, подобному синтезу кода Грея, с той лишь разницей, что комбинация этого кода образуется из исходной комбинации двоичного кода путем суммирования ее по модулю 2 со сдвинутой влево на один разряд этой же комбинацией. При этом отбрасывается старший разряд полученной суммы. Дополнительным правилом является следующее: если результатом суммирования по сформулированному выше правилу окажется исходная комбинация, то она инвертируется. В табл. 3.5 приведены комбинации описываемого кода для и = 4 и и = 5.
Таблица 3.5. Двоичный код с d > 2 между соседними кодовыми комбинациями
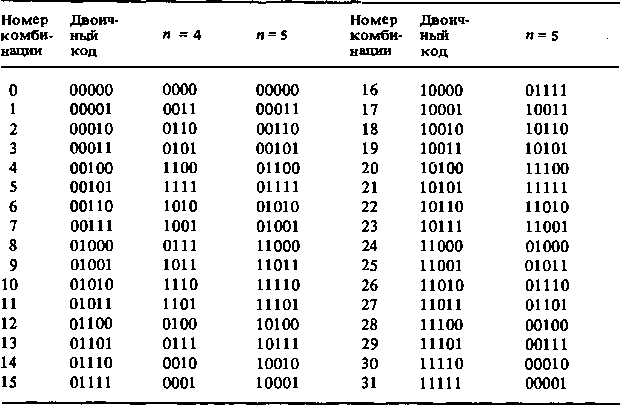
Комбинация № 8 для п = 4 и № 16 для п = 5 образованы инвертированием полученной комбинации (в соответствии с дополнительным правилом) . Расстояние между всеми соседними комбинациями равно двум за исключением комбинаций № 8 (для и =4) и № 16 (n=5), для которых оно равно трем.
Обратное преобразование в двоичный код производится, начиная с младшего разряда преобразуемой комбинации, по следующему правилу.
Сначала переписывается без изменения младший разряд. Значение каждого последующего (более старшего) разряда двоичного кода находится путем суммирования по модулю 2 этого разряда преобразуемого кода с предыдущими (более младшими) разрядами. Например, комбинация № 25 пятиразрядного без избыточного двоичного кода с d > 2 между соседними комбинациями 01011 соответствует следующей комбинации двоичного кода: младший (нулевой) разряд 1, первый разряд 1 + 1=0, второй 0 + 1 + 1 = 0, третий 1 + 0 + 1 + + 1 = 1, четвертый 0+1+0+1 + 1, т. е. 11001. Исключение в обратном переводе составляют, естественно, лишь комбинации № 8 (для л = 4) и № 16 (для n=5), которые образуются в результате их обратного инвертирования. В общем случае n-разрядного кода номера инвертируемых комбинаций соответствуют числам 2n-1.
Минимальное кодовое расстояние в рассматриваемом коде dmin= 1, так что в принципе он допускает ложные сообщения при однократных ошибках (например, переход комбинаций № 11 в № 21, № 13 в№21,№15в№31 и др.). Однако если ввести ограничения на передаваемые сообщения, заключающиеся в том, что с вероятностью, близкой к 1, каждое последующее сообщение отличается от предыдущего не более чем на ± 1 квант, то описанный без избыточный код обнаруживает все однократные ошибки, т. е. обладает свойствами помехозащищенного кода с d = 2. При этом приемник должен лишь контролировать, что принятая комбинация отличается от предшествующей не более чем на ± 1 (т. е. разрешенная апертура приема Н = 2). В случае выхода принятой комбинации за разрешенную апертуру она бракуется.
Двоично-десятичные коды базируются на двоично-десятичной системе счисления. Каждый разряд десятичного числа записывается в виде двоичного четырехразрядного числа (тетрады). Поскольку тетрадой можно записать 16 различных цифр, десятичная цифра может бьггь записана различными двоичными числами. Это порождает многообразие двоично-десятичных кодов.
Все двоично-десятичные коды подразделяются на весовые и невесовые. ’’Весом” единицы разряда двоичного числа является ее эквивалент в десятичной системе. Сумма весов двоичной тетрады равна цифре десятичного числа. Весовым двоично-десятичным кодом называется такой код, в котором веса разрядов для всех десяти комбинаций сохраняются постоянными.
В табл. 3.6 представлены некоторые весовые двоично-десятичные коды, отличающиеся весом разрядов двоичного числа.
Перечисление весов разрядов дает название двоично-десятичному коду, например: код 8-4-2-1, код 5-4-2-1, код 2-4-2-1 и т. д.
Код 8—4—2—1 является единственным весовым кодом, в котором разрядные коэффициенты десятичного числа могут быть получены однозначно: например, цифре 6 соответствуют единицы в первом и втором разрядах; цифре 9 — в нулевом и третьем разрядах и т. д. Поэтому код 8-4-2-1 очень удобен для преобразователей типа код- аналог, применяемых в приемниках кодоимпульсных телеизмерительных устройств. Наличие единицы в соответствующем разряде однозначно может быть отображено добавлением соответствующей порции (веса) аналоговой величины (например, выходного тока или напряжения) на выходе преобразователя.
Код 5-4—2-1, как видно из табл. 3.6, обладает той интересной особенностью, что вторая половина кодовых комбинаций (5-9) во всех разрядах, кроме старшего, повторяет кодовые комбинации первой половины (0-4) и лишь в старшем разряде нуль заменяется единицей.
Код 2-4-2-1 может быть получен инверсным отображением кодовых комбинаций относительно центральной оси, делящей все комбинации на две равные части.
Таблица 3.6. Весовые двоично-десятичные коды
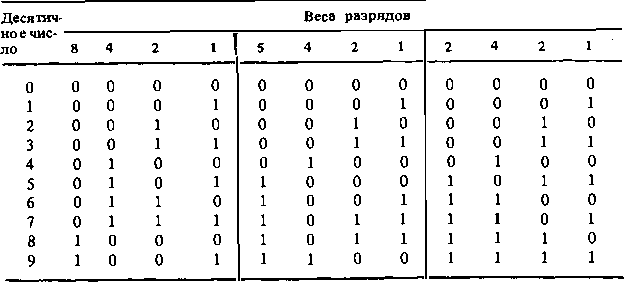
Выбор того или иного двоично-десятичного кода диктуется целым рядом конкретных условий его использования и соображениями удобства его реализации.
Двоично-десятичные коды широко применяются при построении дискретных телеизмерительных систем, особенно в тех случаях, когда измеряемый параметр должен воспроизводиться на цифровых указывающих приборах.
Двоично-десятичные коды обладают некоторой избыточностью — коэффициент избыточности в каждой декаде примерно равен 0,2. Это обстоятельство может быть использовано для обнаружения некоторых ошибок. Для этой цели кроме десяти рабочих комбинаций должны фиксироваться и остальные шесть комбинаций, причем при приеме этих комбинаций, которые могут быть лишь результатом ошибок при передаче кода, должен обеспечиваться запрет воспроизведения информации. Однако при этом обнаруживаются далеко не все, даже самые простые, однократные ошибки.
Двоично-шестнадцатеричный код широко используется для сокращенной записи кодовых комбинаций, имеющих байтную структуру. Двоичное четырехразрядное число записывается шестнадцатеричным символом (см. табл. 3.3). При этом двоичный байт (8 разрядов двоичного кода) записывается шестнадцатеричными разрядами. Например, двоичные последовательности 1110 0111, 1011 1101 записываются соответственно Е7 и BD. Точка перед символами* отличает двоичношестнадцатеричные двухразрядные числа от двухразрядных шестнадцатеричных чисел (Ε7)16 = (231)10 и (BD)16 = (189)10.
* В литературе встречается также обозначение ”Н” вместо точки: Е7Н, BDH и т. д.
Сменно-качественные (СК) коды — это коды, в которых имеет место обязательная смена символов в соседних разрядах, т. е. кодовые комбинации этих кодов не содержат одинаковых символов в соседних разрядах. Благодаря такой структуре каждый последующий элемент кодированного сигнала отделяется от предыдущего, что используется для синхронного переключения приемного устройства (так называемая потактовая синхронизация).
Сменно-качественный код с основанием т>3. Этот код был предложен Б. К. Щукиным и использован в целом ряде систем телеуправления [20]. Основой структуры кода Щукина являются соединения из и элементов с т символами (качествами), на которые наложено одно ограничение — рядом размещенные символы не могут быть одинаковыми. Например, если используются символы 0, 1, 2 (т =3), то разрешенными комбинациями будут 012, 010, 210, 202 и т. д. Комбинации 001, 011, 220, 122 и др. являются запрещенными. Полное число комбинаций СК кода определяется формулой
![]() (3-14)
(3-14)
Из этой формулы, в частности, следует, что число символов кода должно быть более двух (m>3). Действительно, при т = 2 Νρ = 2 независимо от числа разрядов и. Следовательно, СК код Щукина является недвоичным кодом и для его реализации необходимы сигналы с числом импульсных признаков не менее трех.
Сменно-качественный код обладает определенной избыточностью, поскольку из общего возможного числа комбинаций N = т используется лишь часть, определяемая выражением (3.14). Коэффициент избыточности подсчитывается по выражению
![]()
Сменно-качественный код является несимметричным. Распределение кодовых векторов по кодовым расстояниям зависит от конкретных параметров кода [6].
Двоичный сменно-качественный код с k-кратным повторением символов (двоичный код с использованием дискретной широтно-импульсной модуляции — ДШИМ). Двоичный код со сменой символов в соседних разрядах строится на базе использования широтно-импульсной модуляции: 0 кода передается сигналом длительности t, 1 — длительности kt, где к — целое число (к > 2, в общем случае к может быть и не целым числом).
Рис. 3.2. Двоичный сменно-качественный код (ДСК) с λ-кратным повторением символов (к = 3):

I - двоичный код; II - сигнал ДСК; III - двоичный сменно-качественный код
Кодовые комбинации ДШИМ образуются из двоичного кода следующим образом:
все разряды двоичного кода разделяются на нечетные и четные. Число разрядов двоичного кода и ДШИМ одинаково;
все нечетные разряды ДШИМ записываются в виде нулей, все четные — в виде единиц (или наоборот);
разряды двоичного кода, содержащие единицы, записываются в виде λ-кратно повторяемых нулей в нечетных разрядах и λ-кратно повторяемых единиц в четных разрядах ДШИМ.
Например, при n= 5 и λ= 3 для некоторой комбинации двоичного кода получим: 01101 =01110001000.
Изображение кодированного сигнала для этой комбинации ДШИМ представлено на рис. 3.2.
Все кодовые комбинации ДШИМ начинаются с одного и того же элементарного сигнала (0 или 1) и содержат постоянное число переходов 0 →1.
При этом все соседние разряды имеют разноименные символы. Длина кодовых комбинаций ДШИМ зависит от числа единиц в исходном двоичном коде и значения к. С увеличением к растет помехозащищенность кода, однако увеличивается и длительность кодовых слов.
По существу рассматриваемый код ДШИМ является простым двоичным кодом, в котором для передачи информационных единиц используется дополнительное качество — длительность посылки элементарного сигнала: единица передается удлиненной посылкой kt0, которая может состоять из последовательности либо физических единиц, либо нулей. Представление длительности посылки в виде к повторяемых бит позволяет свести анализ помехоустойчивости ДШИМ к анализу помехоустойчивости двухзнаковых (бинарных) кодов.
Непостоянство длительности кодовых слов затрудняет анализ помехоустойчивости кода. Однако, полагая, что не обнаруживаемые переходы между кодовыми словами разной длительности отсутствуют, в [6] удалось получить выражение для расчета коэффициентов ложных переходов ДШИМ. Учитывая, что любая помеха, приводящая к нарушению числа элементарных сигналов в кодовой комбинации, обнаруживается, нетрудно установить, что для ДШИМ справедливо равенство dmin=k — 1, т. е. для того чтобы код обнаруживал все однократные ошибки, необходимо иметь к = 3. Увеличение d f может быть достигнуто введением дополнительного разряда контроля по четности (паритету). Особенностью ДШИМ является то, что проверка на четность должна производиться лишь по четным (или нечетным) разрядам ДШИМ. Лишь при этом dmin повышается на 1. Проверка же на четность всех разрядов ДШИМ может привести к снижению его помехозащищенности .
Применение ДШИМ позволяет использовать простейшие методы синхронизации — потактовую синхронизацию с одним задающим генератором импульсов на стороне передатчика. Реализуются ДШИМ с помощью простейших кодирующих и декодирующих устройств обычного двоичного кода с добавлением формирователя и селектора удлиненных (k-кратно повторяемых) элементов сигнала.
В зарубежной литературе аналогом ДШИМ являются коды на основе дискретной широтно-импульсной модуляции (см. рис. 2.18, в).
Коды с обнаружением r-кратных и исправлением s-кратных ошибок должны обладать минимальным кодовым расстоянием, определяемым условиями (3.3) и (3.4). Увеличение кодового расстояния достигается увеличением числа разрядов кода п при уменьшении числа используемых рабочих комбинаций Nр, т. е. увеличением Киз.
В табл. 3.12 приведено количество рабочих комбинаций с кодовым расстоянием d в зависимости от числа разрядов в коде п для d < 5 и и < 10 [10]. Из таблицы следует, что с увеличением d резко снижается число используемых (рабочих) комбинаций, так, при d = 5 (при этом код способен обнаруживать и исправлять двукратные ошибки) и n=10 число рабочих комбинаций N =16 из 210 = 1024 возможных комбинаций двоичного без избыточного кода.
Предельное число рабочих комбинаций, удовлетворяющих условию исправления всех ошибок кратности до s включительно, согласно Хэммингу составляет
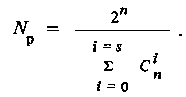 (3.15)
(3.15)
Практически этот теоретический предел достигается далеко не всегда. В частности, данные табл. 3.12 несколько занижают число Nр по сравнению с (3.15). Однако, изменяя исходные комбинации, с которыми производится сравнение всех остальных, можно получить данные, более близкие к (3.15).
Таблица 3.12. Количество рабочих комбинаций Nр с кодовым расстоянием d и числом разрядов п

Определение рабочих комбинаций, обладающих заданным кодовым расстоянием, из общего числа N = 2” двоичного без избыточного кода является основной задачей теории кодирования. Известно множество способов решения этой задачи, которые предлагают различные коды, обнаруживающие и исправляющие ошибки. Применительно к телемеханике наибольшее распространение получили так называемые разделимые групповые систематические коды [16].
Разделимые систематические групповые коды
Все символы разделимых кодов разделяются на информационные символы и контрольные (проверочные) к: п = пи+ к.
Значения контрольных символов находятся по определенной системе в результате проведения некоторых линейных алгебраических операций над информационными символами. Поэтому такие коды получили название разделимых систематических кодов или просто систематических.
Все двоичные систематические коды являются групповыми кодами, поскольку они удовлетворяют условию существования алгебраической конечной группы относительно операции сложения по модулю 2.
Сокращенное обозначение группового кода G (п, пи), где п — общее число разрядов кода; — число информационных разрядов.
Набор рабочих кодовых слов определяется числом информационных разрядов:
![]()
Число проверочных символов в кодовом слове и способ их формирования определяются тем, какие и сколько ошибок должен исправлять или обнаруживать данный код.
Значения проверочных символов для каждой рабочей комбинации
определяются однозначно по информационным символам. Правила нахождения контрольных символов по информационным, обеспечивающие заданное минимальное кодовое расстояние, и определяют разнообразие разделимых групповых кодов.
Для определения всех Νρ комбинаций группового линейного кода достаточно определить контрольные символы только для единичных векторов информационной части кода, число которых равно пи. Совокупность информационных и контрольных символов для единичных информационных векторов, записанная в виде матрицы, образует так называемую образующую матрицу, содержащую пи строк и (пи + к) столбцов:
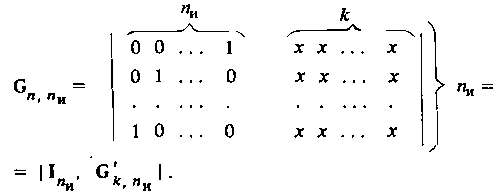
Величины х в подматрице ![]() принимают значения 1 или 0 в зависимости от правил формирования кода. Подматрица
принимают значения 1 или 0 в зависимости от правил формирования кода. Подматрица![]() называется дополняющей образующей подматрицей. Поскольку единичная подматрица I всегда детерминирована, все многообразие кодовых и комбинаций кода G(n, nи) определяет подматрица
называется дополняющей образующей подматрицей. Поскольку единичная подматрица I всегда детерминирована, все многообразие кодовых и комбинаций кода G(n, nи) определяет подматрица
По образующей матрице определяются все рабочие комбинации искомого кода. Для этого необходимо произвести сложение по модулю 2 строк образующей матрицы во всех сочетаниях.
Ниже рассматриваются два класса разделимых групповых кодов, получивших преимущественное распространение в телемеханике.
Коды Хэмминга предназначены для исправления и обнаружения всех однократных ошибок (при d = 3), исправления однократных ошибок и обнаружения двукратных (при d = 4) и т. д.
Все n разрядов кода под разделяются на информационные и контрольные (проверочные): n=nи+ к. Число рабочих комбинаций ![]() . Число контрольных разрядов находится из выражения
. Число контрольных разрядов находится из выражения
![]() (3.16)
(3.16)
В табл. 3.13 приведены значения л и для различных к, удовлетворяющих выражению (3.16).
![]()
Таблица 3.13. Числа контрольных к и информационных nи разрядов в η-разрядном коде Хэмминга (d = 3)

Контрольные символы осуществляют дополнение до четности (либо нечетности) числа единиц в определенной группе символов в кодовой комбинации. Значения контрольных символов однозначно определяются значениями информационных символов в контролируемой группе (в соответствии с так называемыми проверочными уравнениями) .
Число контрольных символов, равное числу проверок на четность определенных групп символов, должно быть таким, чтобы в результате проверок могла быть сформирована кодовая комбинация, однозначно указывающая на номера искаженных символов в принятой последовательности и символов (включая и контрольные символы).
Контрольные символы в принципе могут располагаться в любых местах η-разрядного кода: после информационных символов, либо до них, либо вперемежку с ними. Однако для большего удобства проверки принятого кода контрольные символы располагаются в разрядах, кратных степени двойки, т. е. под контрольные символы отводятся 1-й, 2-й, 4-й, 8-й и т. д. разряды. Остальные разряды заполняются информационными символами.
Так, например, для кода Хэмминга G (12,8) информационные символы располагаются в 12, И, 10, 9, 7, 6, 5-м и 3-м разрядах. Каждый контрольный символ осуществляет дополнение до четности (либо нечетности) числа единиц в контролируемой группе символов. Разделение символов на к контрольных производится следующим образом. Номера разрядов «-разрядного кода записываются в виде двоичных чисел. Например, для кода G (12,8) (n = 12, nи=8, к =4) имеем
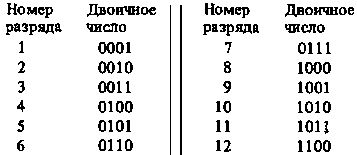
В первую контрольную группу входят те разряды, двоичный номер которых содержит 1 в первом разряде, т. е. 1,3, 5,7,9,11.
Во вторую контрольную группу входят разряды, двоичный номер
которых содержит 1 во втором разряде: 2, 3, 6, 7, 10, 11 и т. д. Число 1 в контрольных группах должно быть четным. Отсюда значения контрольных разрядов хi, i=1, 2, 4, 8, находятся из следующих проверочных уравнений:
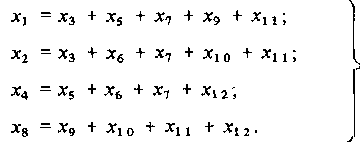 (3.17)
(3.17)
Ниже приведена образующая матрица кода Хэмминга G (12,8). Информационные символы образуют единичную подматрицу I8, контрольные, определенные в соответствии с проверочными уравнениями (3.17), образующую подматрицу G'(4,8):

(3.18)
При кодировании принятых кодовых комбинаций осуществляется проверка четности единиц в контрольных группах, сформированных передающим устройством. В результате этих проверок декодер формирует двоичное число, однозначно указывающее на номер разряда, в котором произошла ошибка. Это число называют опознавателем ошибок. Поскольку код Хэмминга при d=3 способен исправлять только однократные ошибки, опознавателем может служить двоичное число, обозначающее номер разряда кодовой комбинации. Число разрядов опознавателя при этом совпадает с числом контрольных разрядов к. Формируется опознаватель следующим образом: если в проверяемой контрольной группе четность сохранилась, то в соответствующий разряд опознавателя записывается 0, если не сохранилась, — 1. Образованное в результате к проверок двоичное число укажет номер искаженного разряда, который при декодировании должен быть заменен на инверсный. В этом состоит исправляющая способность кода.
Для примера положим, что при посылке кодовой комбинации, соответствующей 4-й строчке кода G (12,8), в информационном символе х5 произошла ошибка: вместо 0 была принята 1. Тогда проверка декодером первой контрольной группы (разряды 1, 3, 5, 7, 9, 11) зафиксирует 1, второй контрольной группы — 0, третьей — 1, четвертой — 0.
Таким образом, будет сформирован опознаватель 0101 — двоичное число 5, указывающее на необходимость инверсии х5. Тем самым исправляется однократная ошибка.
Двукратные ошибки в коде Хэмминга при d=3 могут только обнаруживаться, но не исправляться. Для обнаружения ошибок достаточно, чтобы опознаватель отличался от нуля, что указывает на наличие однократной или двукратной ошибки. Однако такой опознаватель не будет опознавать номеров разрядов, в которых произошли ошибки, т. е. код не может исправлять однократные и двукратные ошибки.
Расширенный код Хэмминга (d = 4) обеспечивает исправление всех однократных и обнаружение всех двукратных ошибок (r= 2, s = 1). Он образуется добавлением проверки четности единиц во всех разрядах кода (дополнительный проверочный разряд х0 в образующей матрице) . Тем самым достигается увеличение кодового расстояния до 4.
Декодирование расширенного кода Хэмминга.
Возможны следующие ситуации при приеме кодовой комбинации:
- все контрольные группы фиксируют 0 — при этом приемник фиксирует отсутствие ошибок и дает разрешение на воспроизведение принятой кодовой комбинации;
- общая проверка на четность фиксирует 1, в остальных контрольных группах формируется опознаватель искажения, не равный 0, — приемник фиксирует однократную ошибку, которую следует исправить по сформированному опознавателю;
- общая проверка на четность фиксирует 0, в остальных контрольных группах набирается опознаватель, не равный 0, — приемник фиксирует двукратную ошибку, которую следует не исправлять, а лишь констатировать ее наличие при приеме.
Таблица 3.14. Опознаватели однократных ошибок для кодов, исправляющих однократные и двукратные ошибки
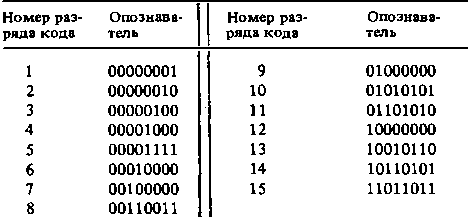
Исправление ошибок кратности s > 2
Для кодов, исправляющих двукратные ошибки и ошибки большей кратности, построение опознавателей более сложно, так как вид опознавателя должен однозначно указывать на одновременные ошибки в s разрядах в различных сочетаниях С. Поэтому опознаватели для исправления s > 2 ошибок берутся из специальных таблиц, полученных с помощью вычислительных машин. В частности, в [19] приведены таблицы опознавателей для s = 2 и 3 вплоть до 29-го разряда. В табл. 3.14 приведены опознаватели однократных ошибок для кодов, исправляющих все двукратные ошибки (s=2) вплоть до 15-го разряда. Опознаватели двукратных ошибок, например в i -м и j-м разрядах, могут быть получены из этой таблицы путем суммирования по модулю 2 опознавателей однократных ошибок в i-м и j-м разрядах. Так, например, опознавателем двукратной ошибки во 2-м и 5-м разрядах будет вектор 00001101.
Составление проверочных уравнений по опознавателям.
Число разрядов опознавателя равно числу проверок на четность, т. е. числу контрольных символов к. Согласно табл. 3.14 15-разрядный код, исправляющий все двукратные ошибки (s = 2), должен иметь к = 8 контрольных разрядов. Следовательно, число информационных разрядов = = 7. Номера контрольных разрядов определяются по таблице опознавателей: они соответствуют тем разрядам, опознаватели которых имеют по одной 1. Из табл. 3.14 находим, что контрольные символы располагаются в 1,2, 3, 4, 6, 7, 9-м и 12-м разрядах. Из нее же следует, что появление 1 в первом разряде опознавателя может явиться результатом ошибок в 1, 5, 8, 10, 14-м и 15-м разрядах. Появление 1 во втором разряде опознавателя может явиться следствием ошибок во 2, 5, 8, 11, 13-м и 15-м разрядах и т. д. Отсюда проверочные уравнения для кода G (15,7) будут следующие:
 (3-19)
(3-19)
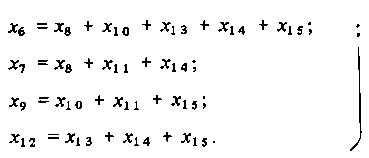
Зная закон определения проверочных символов, нетрудно записать любую из 27 = 128 комбинаций кода G (15,7) путем записи номера комбинации двоичным числовым кодом, разряды которого размещаются в 5, 8, 10, 11,13, 14-м и 15-м разрядах, а в остальных разрядах размещаются проверочные символы в соответствии с уравнениями (3.19).
Эффективность кода определяется, в частности, избыточностью, т. е. долей контрольных символов к по отношению к информационным и„ при обеспечении заданной помехозащищенности кода. Собственно искусство кодирования и состоит в выборе таких методов, которые обеспечивают при равной помехозащищенности меньшую избыточность кода. Особенно это важно для быстродействующих систем передачи сообщений, где приходится экономить на времени каждого дополнительного контрольного бита.
Одним из методов повышения эффективности кодирования является использование коррелированности сообщений в определенной зоне их значений. К этому методу, в частности, относится метод построения без избыточных кодов, помехозащищенных в зоне передаваемых сообщений [23].
Этот метод является развитием метода проф. Г. М. Бутаева при передаче медленно меняющихся ТИ, основанного на том, что каждое последующее значение ТИ не должно отличаться от предыдущего более чем на 1 квант. При этом кодирование соседних значений ТИ обеспечивается без избыточным кодом с заданным кодовым расстоянием d >2 [21].В этом смысле без избыточный код приобретает свойства помехозащищенного кода.
Таблица 3.17. Зависимость т (h ) и допустимые отклонения

В телеинформационных системах реального времени последовательные отчеты телеизмерений (ТИ) технологических процессов обычно сильно коррелированны. Это обстоятельство позволяет применить метод семантического контроля при приеме ТИ [22]. Суть его состоит в том, что контролируется правильность приема кодового слова только в определенной зоне (апертуре), которая устанавливается вокруг последнее го переданного значения. В соответствии со статическими характеристиками источника сообщений появление соседних отсчетов, отличающихся друг от друга более чем на h квант, мало вероятно и квалифицируется как ошибка при передаче*.
Каждое сообщение порождает свою зону разрешенных значений Y, которые удовлетворяют условию![]() , где х — принятое ра
, где х — принятое ра
нее значение ТИ. Кодовое расстояние d > 1, обеспечивающее помехоустойчивое кодирование, должно соблюдаться не для всего множества кодовых слов, а лишь для кодовых слов, входящих в контролируемую зону.
Пусть формат без избыточного двоичного кода содержит п разрядов, величина апертуры содержит 2h + 1 уровней квантования. Исходные кодовые слова в пределах апертуры отличаются лишь т младшими разрядами, число которых связано с h следующей зависимостью:
![]() (3.23)
(3.23)
откуда
![]()
Зависимость необходимого числа т для обеспечения заданной апертуры h и соответствующие отклонения параметра при 8-разрядном исходном коде приведены в табл. 3.17.
Защите подлежат только т младших разрядов исходного кода, а искажения в n—т старших разрядах обнаруживаются апертурным контролем.
Защитные разряды к=n—т ставятся в соответствие т информационным разрядам, обеспечивая заданное кодовое расстояние для кодовых комбинаций из младших разрядов. При этом защитные разряды совмещаются со старшими информационными разрядами путем суммирования с ними по модулю 2.
При декодировании осуществляется обратная операция: по т младшим разрядам принятого слова вычисляются защитные к разрядов, которые суммируются по модулю 2 с n — т старшими разрядами принятого кода. В результате суммирования образуются старшие информационные разряды принятого сообщения.
Рассмотрим предлагаемый метод кодирования на примерах линейных (и, т) -кодов, которые могут быть представлены образующей матрицей G (n, т). Контрольные к разрядов записываются для т единичных векторов, образующих верхние строчки матрицы. Остальные n— т строчек соответствуют незащищенным старшим разрядам, которые при формировании кодовых слов накладываются на к защитных разрядов суммирования по модулю 2.
Определение к защитных разрядов для т младших разрядов, которые играют роль информационных разрядов в линейном коде, производится любыми известными способами синтеза помехозащищенных линейных кодов, например выбором соответствующих образующих полиномов для циклических кодов.
В соответствии с известными границами Хэмминга—Плоткина [16] (n, m)-код может обеспечить кодовое расстояние не более d' для всех значений кодовых слов, входящих в зону апертурного контроля, только в том случае, когда в пределах зоны старшие разряды сохраняются неизменными. Если же в общем случае внутри зоны есть изменение старших разрядов (всегда не более одного кванта), то это может привести к уменьшению кодового расстояния. Для того, чтобы это уменьшение не превосходило 1, предлагается старшие разряды кодировать кодом Грэя. При этом во всех контролируемых зонах обеспечивается кодовое расстояние не менее d = d' — 1. Код Грэя является линейным кодом и представляется порождающей матрицей обычного двоичного кода с добавлением одной единицы в младшем разряде.
Ниже приводятся примеры образующих матриц без избыточных n-разрядных кодов, обеспечивающих в пределах апертуры ± й кодовое расстояние d [23].
* Метод апертурного контроля параметров в ТИ предложен Г. А. Майбородой.
Таким образом, предложенные без избыточные помехозащищенные коды позволяют повысить эффективность передачи коррелированных сообщений ТИ. По сложности реализации они близки к обычным корректирующим кодам. Эти коды являются подклассом более общего класса кодов, уменьшающих, а не только исключающих избыточность за счет апертурного контроля. Так, коды в примерах 3.7 и 3.8 могут быть дополнены общей проверкой на четность и дать d = 4 при одном избыточном разряде.
Глава четвертая
ПЕРЕДАЧА СООБЩЕНИЙ В ТЕЛЕМЕХАНИЧЕСКИХ СИСТЕМАХ
ОСОБЕННОСТИ ПЕРЕДАЧИ СООБЩЕНИЙ В ТЕЛЕМЕХАНИЧЕСКИХ СИСТЕМАХ
Системы телемеханики должны обеспечивать высокую достоверность передачи сообщений (телеконтроль) и высокую надежность передачи команд (телеуправление) в режиме реального времени, т. е. с наименьшим запаздыванием по отношению к контролируемым процессам.
Основные требования к передаче данных в системах телемеханики, используемых в энергосистемах, сводятся к следующему:
обеспечение высокой достоверности передачи в сложных условиях эксплуатации, в частности в условиях высокого уровня помех в каналах связи. В этих условиях передаваемые сигналы должны быть надежно защищены от не обнаруживаемых искажений (ошибок), от неправильного приема кодовых форматов вследствие ошибок синхронизации, от потерь сообщений и возникновения ложных сообщений, в том числе их трансформации;
обеспечение минимального времени передачи в условиях узкополосных каналов связи с повышенным уровнем помех путем применения короткоформатных кодов;
обеспечение передачи произвольной последовательности бит от источника данных, т. е. применение ’’бит-ориентированных” кодов.
КОЛИЧЕСТВЕННЫЕ ОЦЕНКИ КАЧЕСТВА ПЕРЕДАЧИ ДАННЫХ
Достоверность (целостность) данных
Нарушение достоверности (целостности) передачи данных может возникать по причине появления не обнаруживаемых ошибок в принятом сообщении и (или) из-за потерь информации.
Количественной оценкой не обнаруживаемых ошибок является частота не обнаруживаемых ошибок, равная отношению числа необнаруженных ложных сообщений к общему числу переданных сообщений, либо соответствующая вероятность появления ложных не обнаруживаемых сообщений (вероятность того, что принятое сообщение окажется ложным).
Количественной оценкой потерь сообщений является частота потери сообщения, равная отношению числа необнаруженных (потерянных) сообщений к общему числу переданных сообщений, либо вероятность потери сообщения (вероятность того, что переданное сообщение будет потеряно).
Следует заметить, что лишь необнаруженные ошибки или потери сообщений определяют достоверность передачи данных, поскольку обнаруженные ошибки или потери приводят к переспросу данных либо к сигнализации ошибочного приема, в результате чего истинные данные могут быть восстановлены, хотя и с некоторой задержкой.
Эффективность передачи кодовых форматов
Сообщения, передаваемые по каналам связи, формируются в кодовые конструкции (кодовые форматы) длиной и бит, содержащие информационные контрольные к и служебные биты (биты синхронизации, адресные, функционального назначения и пр.).
Правильно (без ошибок) принятый кодовый формат гарантирует правильность содержащихся в нем сообщений. Эффективность передачи кодового формата (EFF) определяется отношением правильно принятых информационных бит к общему числу бит в формате:
![]()
где q = (1 — р) — вероятность правильного приема бита; qn — вероятность правильного приема всех п бит в формате.
При подсчете эффективности телепередачи данных в телемеханических системах следует также учитывать служебные сигналы, необходимые для ведения диалога между передатчиками и приемником, квитирующие сигналы и пр.
Согласно [1] скорость передачи информации определяется средним числом бит информации в секунду, переданных от источника данных и правильно принятых приемником. В соответствии с этим скорость передачи кодовых форматов определяется как эффективность передачи в единицу времени: EFF х v, где v — скорость передачи сигналов, бит/с.
4.3. СТАНДАРТНЫЕ КОДОВЫЕ ФОРМАТЫ ПЕРЕДАЧИ ИНФОРМАЦИИ В СИСТЕМАХ ТЕЛЕМЕХАНИКИ
Стандарт МЭК по системам телемеханики предусматривает определенные кодовые форматы для обеспечения заданных классов достоверности передаваемых данных в широком диапазоне информационной емкости, различной степени ’’интеллектуальности устройств и предназначенных для выполнения телемеханических функций на различных уровнях передачи диспетчерского управления.
К январю 1989 г. МЭК разработал [41] стандартные кодовые форматы для систем телемеханики, ориентированные на асинхронный метод передачи данных в ’’одном окне”* при использовании последовательности двоичных взаимонезависимых сигналов (двоичный симметричный канал без памяти) для полудуплексной и дуплексной связи.
В ближайшем будущем в рамках того же комитета МЭК предстоит разработка рекомендаций по применению стандартных протоколов синхронной передачи данных МКТТ в системах телемеханики. Эти протоколы должны быть адаптированы к требованиям систем телемеханики для обеспечения необходимых классов достоверности. В частности, известный протокол HDLC, определяемый стандартом ISO/DIS 3309.2, использует взаимозависимые сигналы и предназначен для синхронного метода передачи данных в системах связи общего назначения. Обычно он используется в условиях полного дуплекса. В Советском Союзе разработана система телемеханики ГРАНИТ, в которой используется одна из версий протокола HDLC (см. § 5.3).
Рекомендуемые МЭК стандартные кодовые форматы асинхронной передачи для телемеханических систем сведены в табл. 4.2.
Формат FT1.1 обеспечивает расстояние Хэмминга d = 2, кодовое слово содержит 11 бит: 1 бит — старт, 8 бит — информация, 1 бит — защита по четности (нечетности) и 1 бит — стоп. Добавление в конце предложения одного контрольного 11-битового слова образует формат FT 1.2 с кодовым расстоянием d=4.
Контрольное слово, так же как все остальные кодовые слова, имеет биты старт, стоп, бит четности и, кроме того, 8 бит — контрольную сумму CS, образованную арифметическим суммированием всех информационных байт предшествующих кодовых слов по модулю 256.
Форматы FT2 и FT3 образуются кодовыми блоками длиной до 16 байт (п= 128 бит). Информационные кодовые слова этих форматов содержат по 8 бит (байт, октет). Контрольные слова формируются по законам циклического кода. Контрольное слово формата FT2 имеет длину 8 бит, что обеспечивает d = 4 при числе информационных байт до 15.
Контрольное слово формата FT3 имеет длину 16 бит, что обеспечивает d = 6 при числе информационных байт до 14.
* Асинхронная (старт-стопная) передача в системах телемеханики - метод передачи, при котором передаются группы синхронных сигналов, разделенные интервалами произвольной длительности (МЭС, гл. 371 ’’Телемеханика”, 371-07 -07).
При синхронной передаче момент начала передачи сообщения, определяемый моментом посылки стартового сигнала, может быть произвольным.
Размер ’’окна передачи” - число кодовых предложений, которые можно передавать без подтверждения приема перед тем, как обнаружена ошибка в предложении, требующая автоматического повторения передачи [12].
Таблица 4.2. Стандартные кодовые форматы

* Обозначения: п - общее число биг в кодовом слове блока; m - число информационных биг в кодовом слове блока; i - число кодовых слов в блоке (предложении) .
** Класс достоверности I3 обеспечивается при р < 10-3.
Форматы FT1.1 обеспечивают класс достоверности 11 и могут использоваться при передаче информации с относительно невысокий достоверностью, например в циклических системах ТИ.
Форматы FT 1.2 и FT2 обеспечивают класс достоверности 12 и должны применяться при передаче сообщений с повышенной достоверностью, например информации ТС, важных параметров ТИ и т. п.
Формат FT3 обеспечивает класс достоверности I2 во всем диапазоне изменения вероятности ошибки на бит (р< 0,5) и класс I3 при р < 10-3. Этот формат используется при передаче особо важных сообщений, например команд ТУ и т. п.
В системах телемеханики могут использоваться кодовые форматы различной длины L (L— число информационных кодовых слов в кодовом предложении). При использовании кодовых форматов с переменной длиной число L должно указываться в специальном кодовом слове (или словах) в начале кодовых предложений. В процессе передачи кодовых предложений могут возникать различные искажения, вызываемые случайными помехами, в том числе нарушение синхронизации, кратковременные нарушения канала, приводящие к несинхронному сдвигу кодовой последовательности, и т. п.
Во всех этих случаях передача информации должна соответствовать оговоренному классу достоверности, обеспечиваемому выбранным кодовым форматом. Для удовлетворения этого требования должны выполняться определенные правила передачи стандартных кодовых форматов, оговоренные стандартом МЭК.
Для всех форматов сигнал спокойного состояния канала (перед посылкой сообщений) — 1. Интервалы между словами предложения не допускаются (т. е. кодовое предложение следует непрерывно во времени — без перехода в спокойное состояние канала).
Длина L передается в начале кодового предложения и для форматов FT1.1 не превосходит 127, для форматов FT1.2, FT2 и FT3 — 255 информационных слов.
Форматы FT2 и FT3 имеют блочную структуру с максимальным числом информационных байт в блоке i = 15 (для FT2) и i = 14 (для FT3). После каждого блока в этих форматах должны передаваться контрольные байты: для FT2 контрольный байт (8 бит) формируется образующим полиномом Р(х) = х7+х6+х5+х2 + 1, расширенным восьмым битом защиты по четности всего блока с инверсией всех восьми контрольных бит; для FT3 контрольное слово содержит 16 бит и формируется образующим полиномом Р (х) = х16 + х*3 + + х12+х11 + х10 + х8+х6+х3+х2 + 1 с инверсией всех 16 бит.
Таблица 4.3. Формат FT1.1 с переменным числом информационных слов, d = 2

Примечания: 1.В начальном кодовом слове передается число L информационных слов в предложении (L =0-127). Бит D1 в начальном слове всегда 0.
- При обнаружении ошибки при приеме старт-бита, стоп-бита, бита четности, бита D1=0 в начальном слове все кодовое предложение бракуется и не выдается пользователю. При этом должен устанавливаться интервал длиной минимум 22 единицы спокойного состояния до последующего кодового предложения (LJ = 22 бит).
Таблица 4.4. Формат FT1.2 с фиксированным числом информационных слов, d = 4

Примечания: 1. Кодовое предложение содержит фиксированные слова: НАЧАЛО - 10H* (00010000) и КОНЕЦ - 16 Н (00010110); заранее известное число L информационных слов и одно контрольное слово CS - арифметическую сумму значений всех информационных слов.
2. При обнаружении ошибки при приеме старт-бита, стоп-бита, бита четности или контрольной суммы (а также в словах НАЧАЛО и КОНЕЦ в пределах кодового предложения) все предложение бракуется и устанавливается интервал длиной минимум 33 единицы спокойного состояния до последующего кодового предложения (LJ=33 бит).
Здесь и далее даны обозначения в двоично-шестнадцатеричном коде-
Таблица 4.5. Формат FT1.2 с переменным числом информационных слов, d= 4

Примечания: 1. Кодовое предложение начинается заголовком, содержащим четыре слова: 1-е слово - НАЧАЛО - 68H (01101000); 2-е слово - число информационных слов L; 3-е слово - L (повтор); 4-е слово - повтор НАЧАЛО - 68H. Затем следует L (0-255) информационных слов, одно контрольное слово CS (арифметическая сумма значений всех информационных слов), последнее слово - КОНЕЦ - 16 Н (00010110)
2. При обнаружении ошибки при приеме старт-бита, стоп-бита, бита четности и в приеме фиксированного заголовка с двумя одинаковыми словами ’’начало” второе и третье слова заголовка), а также в контрольной сумме CS и в слове ’’конец” все предложение бракуется и устанавливается интервал длиной минимум 33 единицы до последующего кодового предложения (LJ=33 бит).
Таблица 4.6. Формат FT2 с фиксированным числом информационных байт, d= 4
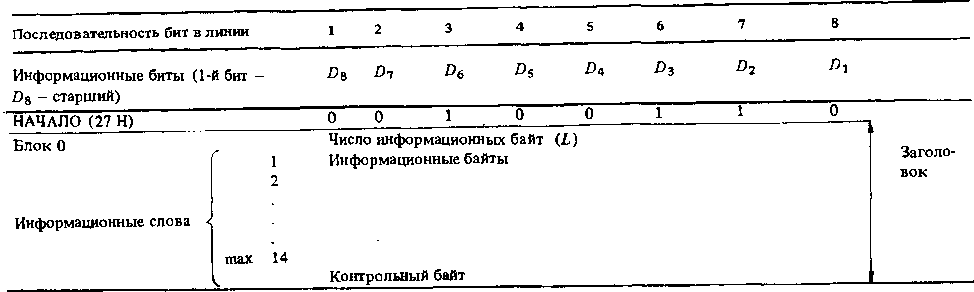
Примечания: 1. Кодовое предложение фиксированной длины начинается указанным в таблице байтом НАЧАЛО 27H (00100111) или 14H (00010100). Выбор того или иного байта ’’начало” зависит от протокола диалоговых процедур (см. §4.7).
2. При обнаружении ошибок при приеме байта НАЧАЛО, контрольного байта все предложение бракуется и устанавливается интервал спокойного состояния между последующим предложением длиной LJ= (L+ 3) байт, если L < 45 байт; при L> 45 байт LJ = 48 байт.
Таблица 4.7. Формат FT2 с переменным числом информационных байт, d= 4
Продолжение табл. 4.7

Примечания: 1. Кодовое предложение начинается фиксированным заголовком, содержащим: 1 байт НАЧАЛО (27 Н или 14H в зависимости от протокола диалоговых процедур, см. § 4.7); 16 байт блока 0. в который входят: 1 байт L - число информационных байт в переменной части предложения (кроме заголовка), 14 информационных байт, 1 контрольный байт. Переменная часть предложения содержит N≤ 16 блоков до 15 байт в каждом.
2. Интервал LJ после обнаружения ошибки в пределах предложения, так же как для формата FT2 с фиксированной длиной, составляет (L + 3) байт при L < 45 байт и LJ =48 байт при L > 45 байт.
Таблица 4.8. Формат FT3 с фиксированным числом информационных байт, d = 6

Примечания: 1. Кодовое предложение фиксированной длины начинается словом НАЧАЛО, содержащим 2 байта: 05 H, 64Н (00000101, 01100100) либо 12Н, 3 DН (00010010, 00111101). Выбор того или иного слова НАЧАЛО определяется протоколом диалоговых процедур (см. §4.7).
2. При обнаружении ошибок при приеме слова НАЧАЛО, контрольных байт в блоках, фиксированной длины предложения все предложение бракуется и устанавливается интервал спокойного состояния до последующего предложения длиной минимум LJ= (L + 6) байт, если L< 42 байт, и LJ= 48 байт, если L > 42 байт.
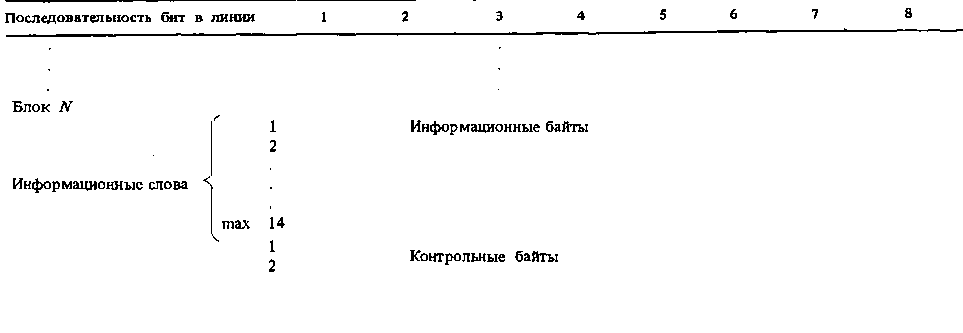
Таблица 4.9. Формат FT3 с переменным числом информационных байт, d = 6
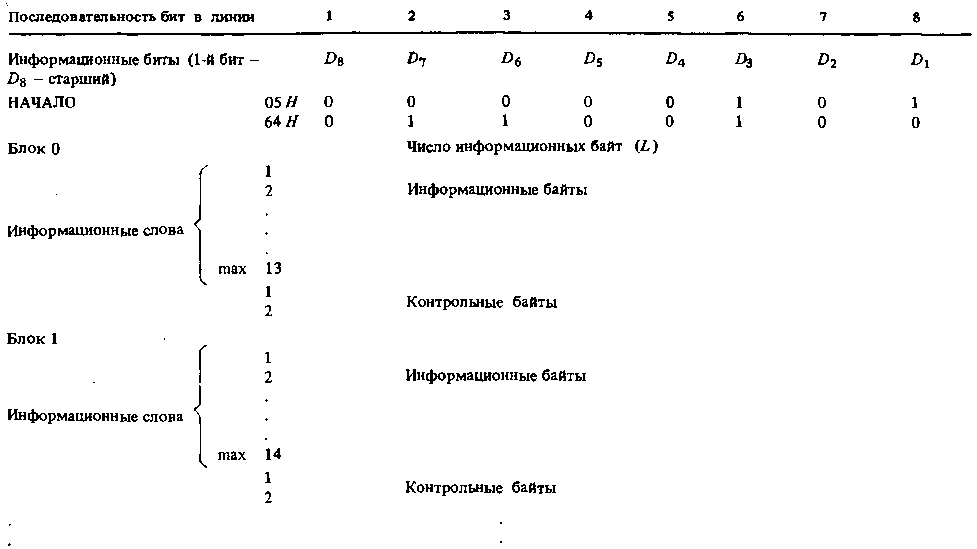
Примечания: 1. Кодовое предложение начинается фиксированным заголовком, содержащим слово НАЧАЛО (2 байта) - 05 Н, 64 Н или 12H, 3 DH (в зависимости от протокола диалоговых процедур, см. § 4.7) и блок 0 (16 байт), в который входят: 1 байт L - число информационных байт в переменной части предложения (кроме заголовка), 13 информационных байт и 1 контрольное слово (2 байта); переменная часть содержит N < 16 блоков до 14 байт в каждом.
2. См. примечание 2 к табл. 4.8.
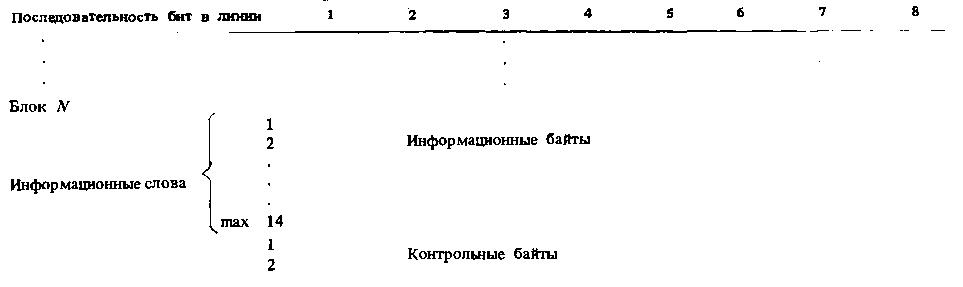

Продолжение табл. 4.6
При фиксации ошибки (ошибок) в предложении оно полностью бракуется приемником, и перед посылкой последующего кодового предложения требуется определенный минимальный интервал спокойного состояния (посылка подряд LJ единиц). Величина LJ указывается для каждого стандартного формата.
Построение кодовых предложений с использованием стандартных форматов и относящихся к ним специальных правил передачи поясняется табл. 4.3—4.9 и примечаниями к ним.
Протокол HDLC — один из наиболее распространенных протоколов в системах связи, используемых для передачи данных различного назначения. Он предложен фирмой IBM и принят в качестве стандарта МККТТ. В разрабатываемых стандартах МЭК (ICE) по телемеханике наряду с принятыми протоколами асинхронной передачи, рассмотренных выше (см. § 4.3), ставится также вопрос об использовании протокола HDLC для синхронной передачи в системах телемеханики.
При отсутствии передачи сообщений (спокойное состояние канала) первичная станция (станция, начинающая диалоговую процедуру передачи сообщений) посылает в канал связи чередующуюся последовательность единиц и нулей (1010 . . .), называемую меандром. Меандр обеспечивает постоянную синхронизацию генераторов первичной и вторичной станций системы. Именно из-за наличия меандра в спокойном состоянии канала протокол HDLC может быть использован в системах с синхронным методом передачи данных.
Основная проблема использования протокола HDLC в качестве стандартного для систем телемеханики состоит в том, что формат HDLC обладает низким кодовым расстоянием, не превосходящим d =2, т. е. в принципе возможны ложные сообщения при двукратных ошибках (хотя вероятность этих ошибок невелика).
Типовая структура кадра сообщений в протоколе HDLC представлена на рис. 4.3.
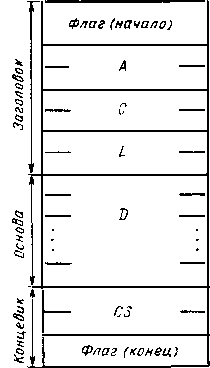
Рис. 4.3. Кадр сообщений в протоколе HDLC:
А - поле адреса, обычно 1, 2 байта; С - поле управления, обычно 1 байт; L - поле длины данных, обычно 1 байт; D - данные (число байт определяется /.); CS - поле защиты (контроля), обычно 1, 2 байта
Кадр состоит из трех частей: заголовка, в который входят байт начала (открывающий флаг), байты адреса А, управления С и длины L (числа); основы — информационный байт данных D; ’’концевика”, содержащего защитные байты CS и конец (закрывающий флаг). Открывающий и закрывающий флаги обычно совпадают и имеют всегда фиксированную последовательность бит: 01111110. Указанная последовательность (шесть единиц подряд, обрамленные нулями) встречается только во флагах кадра, благодаря чему они легко отличимы от прочих слов кадра. Такие слова носят название ’’прозрачных” маркеров. Для того чтобы обеспечить отличие флагов от остальных слов кадра и чтобы не вводить ограничения при передаче сообщений, в протоколе HDLC вводится специфическая операция при кодировании всех слов кадра, кроме флагов, называемая бит-стаффингом. Она состоит в том, что после кодирования последовательности из пяти единиц подряд принудительно вставляется разделительный бит 0, т. е. информационная последовательность, содержащая подряд шесть единиц (111111), в результате бит-стаффинга выглядит следующим образом: 1111101.
При декодировании такой последовательности производится устранение вставленного после пяти единиц нуля (т. е. операция, обратная бит-стаффингу) . Тем самым достигается ’’прозрачность” флагов.
Однако именно из-за бит-стаффинга протокол HDLC уязвим для однократных ошибок (при отсутствии закрывающего флага) или двукратных ошибок (при наличии закрывающего флага).
На рис. 4.4 представлен пример кодовой последовательности в протоколе HDLC при отсутствии закрывающего флага, иллюстрирующий возможность ложного сообщения при однократной помехе, в результате которой 0 бит-стаффинга, подлежащий отбрасыванию при декодировании, превращается в информационный 0 из-за перехода бита № 6 из 1 в 0. Положим, что начиная с бита № 16 (после отброса бит- стаффинга) начинается проверочное слово CS.
В результате однократного искажения происходит сдвиг последовательности информационных символов: бит № 7 в переданном кадре принимается как бит № 8, № 8 — как № 9 и т. д.).
При этом образуется код ошибки (начиная с бита № 6) : 10010011101, т. е. Е(х) =χ10+ х7 + х4 + х3 + х2 +Х1.
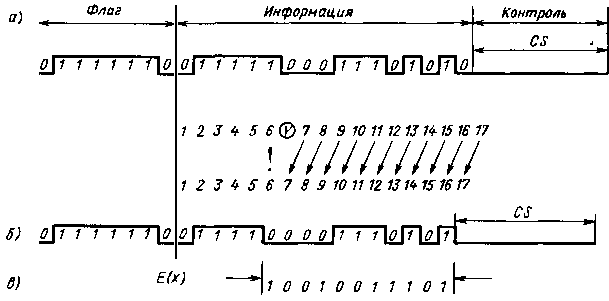
Рис. 4.4. Формирование вектора ошибки Е(х) при однократной помехе (!) в формате HDLC:
а - переданная последовательность, ν — бит-стаффинг; б -принятая последовательность; в - вектор ошибки Е (х)
Если этот вектор ошибки Е(х) разделится на образующий полином Р(х) без остатка, то однократная ошибка даст ложное сообщение. Положим, что высшая степень Р(х) равна r, т. е. в контрольном слове CS осуществляется r проверок на четность. Следовательно, вероятность не обнаружения ошибки составляет при случайном наборе битов 1/2.
Аналогичные ошибки при приеме возможны при ложном бит-стаффинге.
При наличии закрывающего флага всякая однократная помеха обнаруживается приемником. Для образования ложного сообщения необходимо минимум двойное искажение (d = 2).
Ложные сообщения могут возникнуть, например, при подавлении бит-стаффинга (одна ошибка) и одном ошибочном (инверсном) бите (вторая ошибка).
Вычисление вероятностей ложных сообщений в протоколе HDLC представляет определенные трудности. Наиболее целесообразный метод определения вероятности не обнаруживаемых ошибок — метод перебора всех возможных ошибочных комбинаций с помощью ЭВМ.
На рис. 4.1 приведены результаты такого расчета для кодов (330,314) и (116,100) в протоколе HDLC при d-2.
При больших вероятностях ошибок (р>10-3 ) код HDLC обеспечивает класс достоверности Ζ2· Однако при малых вероятностях ошибок (р< 10-4) кривая вероятности ошибок располагается выше границы класса I2, т. е. не обеспечивает помехозащищенности этого класса.
Для ориентированной оценки вероятности не обнаруживаемых ошибок в коде HDLC можно рекомендовать следующие формулы, определяющие усредненные вероятности по всем возможным кодовым комбинациям и фазе воздействия ошибок в кадре:
для однократных ошибок
![]()
для двукратных ошибок
![]()
В процессе функционирования телемеханических систем, включающих станции, передающие информацию, и станции, принимающие информацию, между станциями осуществляется определенный обмен (диалог) служебной информацией, обеспечивающий заданный уровень достоверности передаваемых сообщений. В зависимости от конфигурации системы, используемых каналов связи, важности передаваемых сообщений процедуры обмена информацией между станциями могут быть различными.
В стандартах МЭК по телемеханике предусматриваются три класса диалоговых процедур на канальном уровне протокола: передачи информации:
класс S1 — посылка без ответа: передача информации от передающей станции, не требующая ответа (подтверждения, квитанции) от принимающей станции;
класс S2 — посылка с подтверждением: передача информации, требующая подтверждения (квитанции);
класс S3 — запрос—ответ: передача информации по запросу (в ответ на запрос).
С точки зрения диалоговых процедур различаются первичные и вторичные станции телемеханической системы. Первичная станция — это станция, инициирующая диалог, т. е. вызывающая начало передачи сообщений. Для классов S1 и S2 передающая станция является первичной, поскольку по ее инициативе начинается передача данных, а принимающая станция — вторичной. Для класса S3 первичной является запрашивающая станция, которая требует передачи сообщений от вторичной (вторичных) станций.
Процедура класа S1 (посылка без ответа) не обеспечивает защиты от потери передаваемых сообщений. Это означает, что сообщение не восстанавливается, если оно забраковано приемной станцией или если приемная станция не может принять его из-за переполнения буфера памяти. Поэтому этот класс процедуры передачи применим в системах телемеханики, в которых более высокий уровень протокола передачи ответствен за защиту от потерь сообщений, либо в циклических системах с медленно меняющейся информацией, в которых случайные потери информации допустимы. Процедура S1 предусматривает использование однонаправленного (симплексного) канала связи.
Процедура класса S2 предусматривает подтверждение (квитирование) приемником предназначенной ему передачи. Применяется в системах передачи случайных, спорадически возникающих сообщений.
Квитирование может быть двух видов: положительное (КВП) и отрицательное (КВО). При КВП квитирующий сигнал посылается приемником передатчику в ответ на правильно принятое сообщение, при обнаружении ошибки квитанция не посылается и передатчик должен повторить сообщение. При многократном отсутствии квитирования фиксируется неисправность системы.
При КВО приемник посылает сигнал передатчику в случае обнаружения ошибки, в результате чего передатчик должен повторить передачу сообщения; при отсутствии ошибки квитанция не посылается. При многократном повторении отрицательной квитанции фиксируется неисправность системы.
Процедура посылка — подтверждение применяется для передачи важных сообщений, а также команд (например, ТУ, уставки и т. п.).
Процедура класса S3 предусматривает получение информации от контролируемой станции (КП) по запросу контролирующей станции (ПУ). При невозможности (по той или иной причине) передачи сообщений КП должно ответить отрицательной квитанцией (КВО). При обнаружении ошибки при приеме ответа или при получении КВО запрос повторяется оговоренное число раз, после чего на вышестоящий уровень протокола передачи передается сигнал ’’неисправность системы”.
Процедуры S2 и S3 предусматривают непрерывный диалог между передающей и принимающей станциями и требуют двусторонней связи между ними (дуплексные либо полудуплексные каналы). Процедура обмена информацией между станциями должна занимать ’’одно окно” (размер информационного окна равен 1). Это означает, что запрашиваемая станция принимает запрос на передачу новых сообщений только после успешного приема на ПУ предшествующей передачи либо после фиксации на ПУ ошибки при приеме.
Для процедуры S2 это означает, что новая посылка данных возможна лишь после того, как предшествующая передача полностью окончена, т. е. либо получена квитанция об успешном приеме данных, либо зафиксирована ошибка, требующая их повторения (после определенного интервала времени).
Для процедуры S3 запрашиваемая станция (КП) принимает запрос на передачу новых сообщений только после успешного приема запрашивающей станцией (ПУ) предшествующей передачи либо после фиксации на ПУ ошибки при приеме. Число запросов и интервал времени между последующими после ошибки передачами оговаривается специальными правилами.
С точки зрения диалоговых процедур различаются небалансные и балансные системы телемеханики.
В балансных системах любая станция может быть первичной (передающей или запрашивающей), т. е. выполнять функции КП и ПУ. В небалансных системах первичные и вторичные станции зафиксированы, обычно одна станция (ПУ) является главной (запрашивающей), остальные станции — запрашиваемые или передающие информацию (КП).
Для небалансных систем характерны многоточечные структуры с полудуплексными или дуплексными каналами связи, т. е. с разделением во времени передачи КП—ПУ. Балансные системы обычно используют структуру точка—точка и дуплексные каналы связи с независимой и одновременной передачей данных в обоих направлениях.
Кадры сообщений
Содержание и функциональное назначение сигналов, которыми обмениваются передающая и принимающая станции в системах телемеханики с многоточечной структурой, в процессе реализации того или иного класса диалоговых процедур задаются специальными служебными байтами, которые наряду с информационными байтами входят в кодовую конструкцию, образующую кадры сообщений.
Кадр сообщений состоит из следующих частей: заголовка кадра и тела кадра, которые в свою очередь подразделяются на функциональные поля, содержащие один или несколько байт (рис. 4.5). Заголовок — это начальный кодовый блок кадра, который включает поле длины кадра L, поле адреса А, поле управления данными С, поле данных D и, как всякий кодовый блок, поле контроля CS.
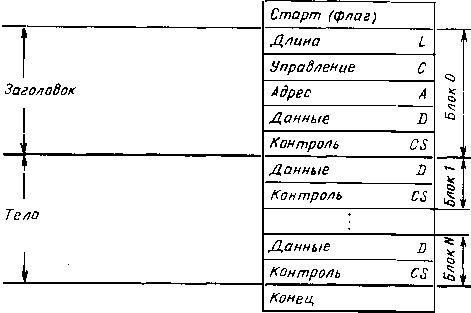
Рис. 4.5. Структура кадра сообщений
Тело кадра содержит несколько информационных блоков (в зависимости от заданной длины L), оканчивающихся байтом (или байтами) контроля CS. Кадр обрамляется байтами начала (который также именуется флагом кадра) и конца кадра. Байты начала и конца кадра выполняют функции кадровой синхронизации и контроля длительности кадра.
В процессе диалога используются так называемые полные (длинные) кадры, которые применяются для передачи данных, либо укороченные (короткие) кадры — для передачи запросов, подтверждений и т.п.
Кадры сообщений, предусмотренные стандартом МЭК, базируются на стандартных кодовых форматах FT1.2, FT2, FT3, рассмотренных в § 4.3. При этом они соответствуют классам достоверности I2 и I3.
Длинный кадр на базе формата FT1.2 (с переменной длиной). В качестве слова ’’начало” используется байт 68 Н, который повторяется в четвертом байте. Второй и третий* байты отводятся для обозначения длины L ; перед информационными байтами следуют байт управления С и байт адреса А (рис. 4.6).
Укороченный кадр формата FT 1.2 начинается байтом ’’начало” 10H. В качестве квитанций о приеме информации используются фиксированные байты Е5Н либо А2H.
Аналогично формируются кадры на базе форматов FT2 и FT3.
* Третий байт является повторением второго.
Назначение полей кадра.
Поле — длина L — обычно содержит один байт и обозначает число байт данных D в информационных блоках кадра (в теле кадра). Значение L лежит в пределах 0—127 либо 0-255.
Адресное поле A кадра сообщения, посылаемого от передающей (первичной) к принимающей (вторичной) станции, содержит адрес принимающей станции (адрес назначения). Адресное поле кадра отвечающей (запрашиваемой) станции содержит адрес этой станции (адрес источника информации). Число байт адресного поля i зависит от конкретных условий применения. Число адресов составляет от 0 до 28i — 1. Первым передается адресный байт, соответствующий наименьшему (по номеру) адресу.
Адрес, предназначаемый всем станциям (циркулярный адрес), соответствует номеру 28i — 1.
Поле управления С содержит информацию о направлении сообщения (от первичной станции ко вторичной или наоборот), о функциональном назначении кадра, о классе диалоговых процедур (S1, S2 или S3), а также сигналы, обеспечивающие функции защиты от потерь и повторения сообщений (рис. 4.7).
Рис. 4.6. Кадры сообщений для стандартных кодовых форматов:
а - кадры формата FT1.2; б - кадры формата FT2; в - кадры формата FT3; L - поле длины; С - поле управления; А - поле адреса; CS - байт защиты

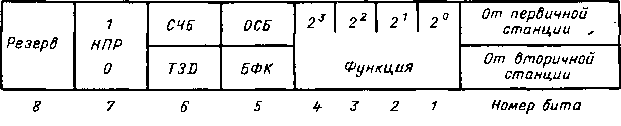
Рис. 4.7. Структура поля управления С
Последовательность передачи бит в линию, начиная со старшего разряда:
бит № 8 — резерв;
бит № 7 НПР — направление сообщения: 1 — от первичной станции ко вторичной, 0 — от вторичной к первичной;
бит № 6 НПР = 1, СЧБ — счетный бит; чередующиеся значения 0,1 при успешной операции посылка — квитанция или запрос — ответ для данной станции. Предназначен для защиты от потерь и дублирующих (повторных) посылок сообщений. Первичная станция при каждой новой процедуре посылка—квитанция или запрос—ответ чередует значение СЧБ. Тем самым первичная станция как бы сохраняет копию номера посылки (четного—нечетного) до ее квитанции или ответа со стороны вторичной станции. Если ответ или подтверждение (квитанция) отсутствуют, то новая посылка посылается с тем же значением СЧБ;
бит № 5 НПР = 1, ОСБ — отмена функции счетного бита: если ОСБ равна 0, функция СЧБ отменяется (т. е. не следует ожидать перемены бита СЧБ); при ОСБ равной 1 функция смены бита СЧБ действует.
В случае посылки команды ’’установка в 0” (RESET) (табл. 4.10, код № 0,1) значение СЧБ всегда 0 и ОСБ равна 0.
Для класса процедуры S1 (посылка, не требующая ответа) для циркулярных сообщений и др., т. е. для процедур, в которых не контролируются потери или дублированные сообщения, изменение счетного бита не контролируется и ОСБ является свободным битом;
бит № 6 НПР = 0, ТЗД — бит требования запроса данных. Предусматривается два класса данных (по приоритету передачи): класс 1 и класс 2. Передается от вторичной станции при наличии у нее данных класса 1. При процедуре S3 бит ТЗД равен 1, если вторичная станция располагает данными класса 1 и готова их передать. При процедуре S2 ТЗД = 1 означает, что вторичная станция хочет получить от первичной данные 1-го класса и запрашивает их. При ТЗД =0 соответственно речь идет о данных не 1-го класса. К данным 1-го класса относятся случайные эпизодические сообщения (например, ТС) или другие важнейшие данные. К данным класса 2 могут быть отнесены циклические ТИ или данные с низким приоритетом;
бит № 5 НПР = О, БФК — контроль переполнения приемного буфера. БФК = 0 означает, что прием сообщений станцией возможен. БФК = 1 указывает, что прием сообщений невозможен ввиду переполнения буфера.
Таблица 4.10. Функциональные коды для поля управления С. Передача от первичной станции (НПР = 1)
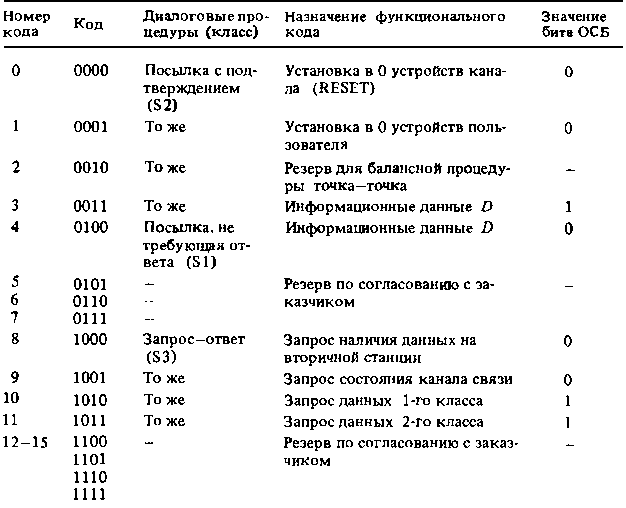
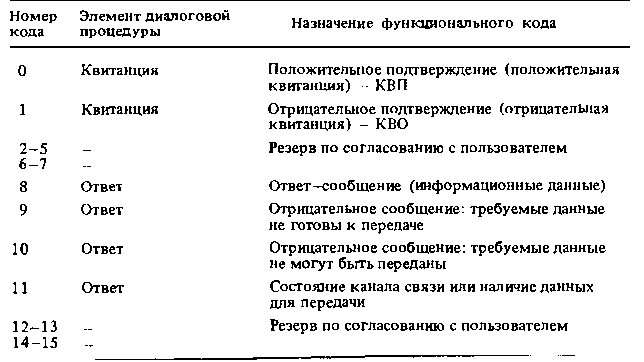
Таблица 4.11. функциональные коды поля управления С.Передача от вторичной станции (НПР = 0)
Коды функционального назначения поля управления (функция) образуются четырьмя битами контрольного поля (№ 1, 2, 3, 4), определяют класс диалоговой процедуры и функциональное назначение сообщения (табл. 4.10 и 4.11).
Диалоговые процедуры и сигналы обмена между канальным и пользовательским уровнями протокола передачи сообщений
Стандартом МЭК рекомендуется определенное соответствие между диалоговыми процедурами передачи сообщений (канальный уровень) и сигналами обмена канального и пользовательского уровней на КП и ПУ.
Выделяются следующие четыре вида сигналов между канальным и пользовательским уровнями:
заказ — ЗАК (Si): сигнал от пользовательского уровня к канальному с заказом определенного класса процедуры передачи — S1, S2 или S3;
уведомление от канала — УВК: сигнал от канального уровня к пользовательскому о завершении процедуры по предшествующему заказу. Лишь после получения УВК пользователь может послать следующий ЗАК;
разрешение исполнения — РИ: сигнал от канального уровня к пользовательскому о готовности принятых данных к использованию;
уведомление от пользователя — УВП: сигнал от пользователя о завершении приема предшествующего сообщения с канального уровня.
На рис. 4.8 представлены схемы обмена сигналами между канальными и пользовательскими уровнями при различных диалоговых процедурах.
Процедура передачи посылка без ответа — класс S1
а) Сигналы между пользовательскими и канальными уровнями (первичная процедура)
Первичная станция. От пользовательского уровня посылается сигнал ЗАК (S1) на установку процедуры S1 в канале связи. Если канальный уровень не способен осуществлять передачу сообщений (неисправность модема или неисправность передатчика и т. п.), то он уведомляет об этом пользовательский уровень сигналом уведомления УВК (отрицательная квитанция).
Вторичная станция. При правильном приеме сообщения (без обнаружения ошибок) канальный уровень посылает сигнал ’’разрешение исполнения принятых данных” РИ(D), означающий, что пользователь может использовать полученные данные. После завершения приема сообщения пользователь может уведомить об этом канальный уровень сигналом уведомления УВП.
б) Сигналы передачи по каналу связи (интерфейс канал—канал)

Рис. 4.8. Диалоговые процедуры и сигналы обмена между уровнями протокола передачи сообщений
В канал посылается кадр (посылка D) с функциональным кодом в поле управления № 4 (0100), соответствующий классу процедуры S1 (см. табл. 4.10), и информационными данными D. Между посылками очередных кадров необходимо выдерживать интервал спокойного состояния L в соответствии с выбранными кодовыми форматами FT1.2, FT2 или FT3 (см. § 4.4). Принимающая станция сохраняет принятый кадр в буфере.
Процедуры передачи посылка—подтверждение — класс S2
а) Сигналы между пользовательским и канальным уровнями
Первичная станция. От пользовательского уровня поступает сигнал ЗАК (S2) на выполнение процедуры S2 с указанием числа повторных посылок данных в случае неуспешной передачи (отсутствие квитанции). Если канальный уровень не в порядке (неисправности модема или передатчика и т. п.), то он сразу же уведомляет об этом пользовательский уровень уведомлением УВК (отрицательная квитанция). Если посылка данных по каналу оказывается неуспешной, о чем вторичная станция сообщает первичной соответствующей квитанцией, то канальный уровень передает пользовательскому уровню отрицательную квитанцию УВК. Это же уведомление передается пользователю, если процедура передачи данных оказывается неуспешной после заданного числа повторений (попыток).
Вторичная (квитирующая) станция. Сигнал РИ (D) от канального уровня означает, что прием данных D прошел правильно (без ошибок) и пользователь может ими воспользоваться. Сигнал РИ(Л) не выдается, если новая посылка получена ранее установленного времени исполнения предшествующего сообщения. Разрешение на выдачу РИ(О) может производиться специальным сигналом от пользовательского уровня УВП, сообщающим об освобождении пользователя для приема нового кадра данных (на рис. 4.8 этот сигнал не обозначен).
б) Сигналы передачи по каналу связи
По каналу связи от первичной станции посылается кадр сообщения с функциональным кодом в поле управления, соответствующим процедуре S2 (см. табл. 4.10, коды № 0—3), если предшествующая передача завершена. При успешном приеме данных вторичная станция отвечает положительной квитанцией (КВП). При не приеме данных, например из-за переполнения буфера памяти, от вторичной станции посылается отрицательная квитанция (КВО) (см. табл. 4.11, коды № 0, 1).
Защита от потери и от дублирования (повтора) сообщений. Первичная станция отмечает посылку каждого нового кадра сообщений сменой значения счетного бита СЧБ (0 → 1 или 1 → 0). Процедура передачи сообщения оканчивается, когда первичная станция получает неискаженную положительную квитанцию от вторичной станции. Если квитанция искажается или вообще отсутствует, то посылка данных D от первичной станции повторяется с неизменным значением СЧБ. Максимальное число повторений задается на пользовательском уровне сигналом ЗАК (S2).
Вторичная станция запоминает значение полученного счетного бита СЧБ и посланную квитанцию к первичной станции. Если значение бита СЧБ в следующем кадре изменилось (что означает передачу новых данных), то записанная квитанция (или ответное сообщение) стирается и может быть заменена новой. Передача записанной в памяти вторичной станции квитанции (или ответные сообщения) повторяется, если вновь принятые данные содержат ошибку.
Процедура запрос—ответ — класс S3
а) Сигналы между пользовательским и канальным уровнями
Первичная (запрашивающая) станция. От пользовательского уровня поступает заказ ЗАК (S3) на процедуру S3 с указанием числа повторных запросов. Если канал не может (по тем или иным причинам) передать запрос, то пользователю немедленно выдается уведомление УВК (отрицательная квитанция). Канальный уровень передает кадр запрос, если предыдущая процедура запрос—ответ закончена.
Если процедура запрос—ответ заканчивается успешно, то канальный уровень выдает пользовательскому уровню запрашиваемые данные в сопровождении сигнала РИ (D).
При получении отрицательного ответа от вторичной станции (когда запрашиваемые данные не могут быть переданы) канальный уровень выдает пользовательскому сигнал УВК (отрицательную квитанцию). Этот же сигнал УВК передается при неуспешных запросах, повторяемых оговоренное число раз.
Вторичная (запрашиваемая) станция. Если запрос принять без ошибки, то канальный уровень выдает на пользовательский уровень сигнал РИ(3), после которого запрашиваемые данные D поступают в канал для передачи ответа — сообщения.
б) Сигналы передачи по каналу связи
В канал от запрашивающей станции посылается кадр запрос — задание, соответствующий процедуре запрос—ответ с функциональным кодом № 8—11 в поле управления (см. табл. 4.10), если окончена предшествующая процедура запроса.
По получении кадра запрос—задание вторичная станция посылает: либо ответ-сообщение (D), если запрашиваемые данные готовы, либо отрицательную квитанцию (КВО) в поле управления ответного кадра, если данные не готовы (см. табл. 4.11, код № 9), либо отрицательную квитанцию в виде отдельного фиксированного байта (либо нескольких байт) при обнаружении ошибки при запросе (см. рис. 4.6).
Защита от потерь и повторных сообщений. Первичная станция отмечает каждый новый кадр процедуры запрос—ответ сменой значения счетного бита (0 → 1, 1 → 0). Если предшествующий кадр окончился неуспешно (т. е. вместо запрашиваемых данных пришла отрицательная квитанция), то кадр запрос задания повторяется с прежним значением бита СЧБ.
Вторичная станция принимает счетный бит СЧБ и запоминает его в буферной памяти, так же как и посланный ответ данных. Если новый кадр запроса приходит с изменившимся значением СЧБ, то вторичная станция отвечает новыми запрашиваемыми данными и буферная память перезаписывается. Однако если запрос пришел с тем же значением СЧБ, то посланный ранее ответ данных D повторяется.
Процедура класса S3 применяется для целей сбора данных с рассредоточенных КП (вторичных станций). При общем (циркулярном) запросе КП используется кадр запроса постоянной длины. При индивидуальном запросе кадр запроса должен содержать адреса КП и вид запрашиваемой информации.
В реальных многоточечных структурах систем телемеханики могут одновременно использоваться диалоговые процедуры различных классов. В качестве примера на рис. 4.9 представлена диаграмма, иллюстрирующая процедуру обмена данными в многоточечной структуре, с одной главной станцией и п периферийными станциями.
Главная станция А выполняет роль первичной, посылает данные к вторичным станциям Вi (i= 1 -- n), используя процедуру S2 — посылка с подтверждением (квитанцией).
Положим, что вторичные станции В1 и В2 приняли данные от станции А правильно и подтверждают это положительными квитанциями КВП (специально выделенный байт Е5Н в формате FT1.2, 14Н в формате FT2, два байта 12Н и 3DH в формате FT3). Посылка данных на станцию Вn требует более подробного ответа (например, при посылке команды ТУ требуется получить подтверждение приема посланной команды). При этом от станции Вn следует подтверждение в виде короткого кадра фиксированной длины (см. рис. 4.6), в котором содержатся адрес вторичной станции и данные о принятой команде.

Рис. 4.9. Диалоговые процедуры S2 и S3
Затем следует посылка данных от станции А по адресу Вт (ADP = = т). Ответ от Вт также осуществляется коротким кадром, в котором кроме подтверждения правильности приема данных от станции А содержится сообщение, что станция Вт имеет данные 1-го класса, которые необходимо срочно передать на станцию А. Для этой цели в байте управления от Вт к А посылается бит T3D о наличии на станции Вт данных 1-го класса (приоритета). Получив это сообщение, станция Л переходит в режим диалоговой процедуры S3 — запрос—ответ: станция А посылает кадр запроса данных 1-го класса (код № 10 в табл. 4.10), а станция Вт отвечает полным кадром ’’ответ” с данными 1-го класса. После приема этого кадра станция А еще раз повторяет запрос с адресом Вт, и так продолжается до тех пор, пока станция Вт в своем ответе сообщит, что больше данных 1-го класса не имеет (бит T3D = 0 в байте управления).
Если посылка данных D от первичной станции принята правильно, но не может быть передана пользователю из-за переполнения буфера памяти вторичной станции, то она отвечает однобайтной отрицательной квитанцией (КВО). Эта ситуация иллюстрируется на рис. 4.9 для станции Bm+1 (процедура S2).
На рис. 4.10 иллюстрируется процедура S2 при обнаружении ошибок при передаче данных (по отсутствию ответа от вторичной станции).
При отсутствии ответа в течение оговоренного времени первичная станция повторяет посылку D с неизменным битом СЧБ (например, СЧБ = 1) по прежнему адресу вторичной станции (например, В1).

Рис. 4.10. Ошибка при передаче посыпки данных и приеме квитанции в процедуре S2
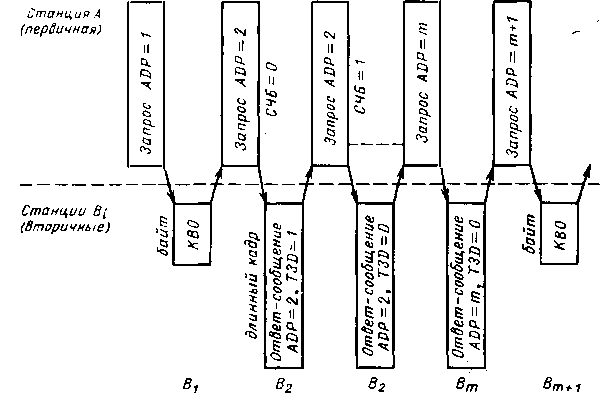
Рис. 4.11. Диалоговая процедура S3-запрос-ответ
Если квитанция от вторичной станции (например, B1) повреждается при передаче, то первичная станция через некоторое время t также
повторяет посылку D по прежнему адресу (ADP = п) с неизменным счетным битом (например, СЧБ = 0). Станция Вп, вновь получив данные с СЧБ = 0, определяет, что ее квитанция (подтверждение приема) не принята, т. е. процедура S2 оказалась неуспешной, и повторяет предыдущий ответ еще раз.
Число повторных посылок-ответов задается заранее и является параметром диалоговой процедуры.
На рис. 4.11 иллюстрируется диалоговая процедура S3 — запрос- ответ при наличии и отсутствии новых данных на вторичных (запрашиваемых) станциях. На станциях Β1 и Вт+1 нет новых данных, и они отвечают отрицательной однобайтной квитанцией КВО. На станции В2 имеются данные 1-го класса, и она опрашивается дважды, пока все данные D1 1-го класса не будут переданы, что подтверждается наличием в поле управления кадра ответ—сообщение станции В2 бита T3D = = 0. На станции Вт нет данных 1-го класса, но есть новые данные, которые и передаются в ответе—сообщении с T3D =0.
На рис. 4.12 иллюстрируется процесс диалоговой процедуры S3 при обнаружении ошибок при передаче запроса и получении ответа. При посылке Запрос на вторичную станцию В1 (ADP=1) произошла ошибка, т. е. станция не приняла запроса и, естественно, не ответила. Тогда станция А по истечении некоторого времени t посылает вторично Запрос с тем же адресом ADP =1 и тем же счетным битом СЧБ=1. Если этот Запрос проходит успешно, то следует ответ—сообщение, который принимается станцией А, и процедура S3 со станцией В1заканчивается.
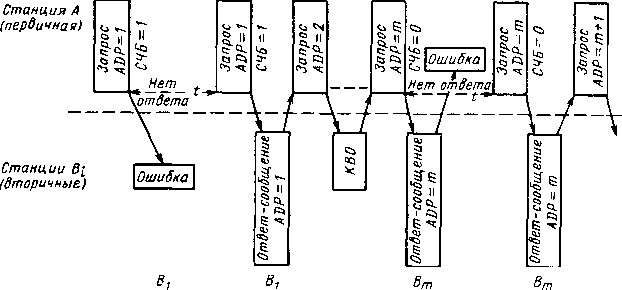
Рис. 4.12. Ошибки при запросе и ответе в процедуре S 3
При запросе станции Вт (по адресу ADP = т) обнаруживается ошибка при приеме Ответа, станция А через некоторое время повторяет Запрос с неизменным СЧБ = 0 и станция Вт повторяет Ответ с теми же данными, которые раньше не были приняты станцией А. Повторение данных происходит по признаку не обновленного счетного бита (СЧБ = 0). Число повторений является параметром диалоговой процедуры.
Глава пятая
МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ ТЕЛЕМЕХАНИКИ
- ОБЩАЯ ХАРАКТЕРИСТИКА
Новый этап развития телемеханики характеризуется разработкой и широким внедрением программируемых телекомплексов, построенных по принципу микроЭВМ на программируемых микросхемах. Роль центрального программного устройства в таких телекомплексах выполняют либо универсальные, либо специализированные микроЭВМ на микропроцессорных модулях, ориентированные на выполнение телемеханических функций.
Принципиальное отличие микропроцессорных систем от традиционных систем телемеханики предыдущего поколения (на интегральных микросхемах низкого и среднего уровня интеграции) состоит в том, что функции и параметры микропроцессорных систем задаются программными средствами при неизменной электрической схеме и конструкции устройств.
Возможность изменения функционального назначения и параметров системы программным путем существенно повышает гибкость и универсальность систем на различных объектах управления, снижает затраты на производство аппаратуры, облегчает адаптацию системы к изменяющимся условиям эксплуатации и т. п.
Микропроцессорные телекомплексы позволяют реализовать значительно более широкие функции по сбору, передаче и обработке телеинформации, чем традиционные телемеханические системы. Так, на базе микропроцессорных устройств на уровне диспетчерских пунктов (ДП) выполняются центральные приемо-передающие станции (ЦСТ), осуществляющие сбор информации по каналам связи с множества контролируемых пунктов (КП) и информационный обмен с ЦСТ смежных и вышестоящих уровней диспетчерского управления. В функции ЦСТ кроме традиционных телемеханических задач входят также телеобработка данных, управление средствами отображения индивидуального и общего пользования, слежение за пределами изменения параметров, достоверизация, регистрация, хранение данных, формирование схем, таблиц, ведомостей в виде, удобном для оперативного использования диспетчерским персоналом.
Программным путем реализуются различные адаптивные алгоритмы передачи информации, повышающие эффективность использования каналов связи и обеспечивающие гибкие приоритеты передачи сообщений. Эти алгоритмы реализуются как на уровне КП при обработке первичных параметров ТИ и ТС, так и на уровне ДП при ретрансляции информации на вышестоящие уровни управления и при вводе данных в ЭВМ оперативно-информационного комплекса.
Благодаря применению программируемых микропроцессорных элементов устройства КП приобретают свойства так называемых интеллектуальных терминалов, которые занимают канал передачей информации только при необходимости (изменение состояния ТС, нарушения заданных пределов изменения ТИ и т. п.).
В микропроцессорных системах достаточно просто реализуется принцип самотестирования аппаратуры, включая аппаратуру каналов связи. При этом могут быть обеспечены непрерывный контроль исправности телекомплекса и регистрация статистических данных по повреждаемости его элементов. Для обеспечения высокой надежности работы телекомплекса его центральная часть выполняется в виде сдвоенной микроЭВМ, обеспечивающей 100%-ный резерв. Каждая микроЭВМ рассчитана на выполнение полного объема задач телекомплекса.
В нормальном режиме микроЭВМ могут работать независимо друг от друга. При выходе из строя одной из машин другая берет на себя весь объем обработки. Аппаратура телекомплекса должна быть рассчитана на непрерывный режим работы без постоянного обслуживания, с автоматическим перезапуском системы после восстановления питания, устранения повреждений каналов связи, самопроизвольного зацикливания программ и т. п. Условия эксплуатации телекомплексов должны соответствовать требованиям стандартов на устройства телемеханики.
Важной особенностью микропроцессорных телекомплексов является возможность совместимости ЦСТ на программном уровне с устройствами телемеханики различных типов. Это дает возможность использования на объектах существующих устройств ТМ и поэтапной их замены на интеллектуальные терминалы.
Структура микропроцессорных телекомплексов
Микропроцессорный телекомплекс (МТК), как и любая система телемеханики, состоит из устройств, расположенных в пунктах управления (устройства ДП) и на объектах контроля и управления (устройства КП). Основным устройством ДП является центральная приемопередающая станция (ЦСТ), к которой сходятся каналы связи от всех КП телекомплекса, на которых расположены периферийные станции (ПСТ) системы. В зависимости от конфигурации, образованной каналом связи и устройствами ДП (ЦСТ) и КП (ПСТ), различаются следующие структуры* МТК (см. рис. В.3):
структура точка—точка;
многоточечная радиальная структура один—один (с одновременным обменом ЦСТ—ПСТ);
многоточечная радиальная структура один— N (с последовательным во времени обменом ЦСТ—ПСТ);
многоточечная магистральная структура; многоточечная кольцевая структура; структура ’’каждый с каждым”.
Телекомплекс может объединять несколько видов структур, образовывая смешанную иерархическую структуру, содержащую несколько ЦСТ и ПСТ.
* Классификация структур дана в соответствии с [1] и [41, публикация 870.1.1].-

Рис. 5.1. Обобщенная структура микропроцессорных телекомплексов (МТК): а - с единой системной магистралью; б - с вторичными (блочными) магистралями ввод-вывод; ЦБУ - центральный блок управления; МКЛ — модуль микропроцессора; ОЗУ, ППЗУ - модули оперативной и перепрограммируемой постоянной памяти
Микропроцессорный модуль управляет системной магистралью, к которой подключаются: модули дополнительной внешней памяти ОЗУ и ПИЗУ (через соответствующий контроллер расширения) в количестве, определяемом требуемой функциональной емкостью, модули интерфейса (параллельного, последовательного) для подключения внешней ЭВМ, каналов связи (модемов), дисплеев, АЦПУ и функциональные модули ввода-вывода технологического назначения (ТУ, ТИ, ТС и т. п.).
По способу подсоединения модулей ввода—вывода к системной магистрали могут быть выделены две структуры: микроЭВМ с единой
системной магистралью и с вторичной магистралью ввода—вывода. В первой структуре (рис. 5.1, а) модули ввода—вывода присоединяются непосредственно к общей системной магистрали. Такая структура при значительном числе модулей требует специальных расширителей магистрали для компенсации запаздывания сигналов с увеличением протяженности магистрали. Примером структуры с единой магистралью является ЦСТ, построенная на базе микроЭВМ СМ-1800.
Наиболее распространенной для МТК является структура с выделенными вторичными блочными магистралями ввода—вывода, которые через общую магистраль ввода—вывода подсоединяются к системной магистрали (рис. 5.1, б). Вторичные магистрали организуются в пределах конструктивного блока с набором определенного числа функциональных модулей ввода—вывода. Эти магистрали обеспечивают возможность удаления отдельных внешних устройств на значительные расстояния (десятки и сотни метров) от ЦБУ. Для большей помехозащищенности на вторичных магистралях ввода—вывода устанавливается повышенное напряжение сигналов (по сравнению с системной магистралью) .
В состав телекомплексов входит ограниченный набор функциональных (технологических) модулей ввода—вывода, обеспечивающих сопряжение станций с контролируемым процессом на КП и средствами управления и отображения информации на ПУ.
Периферийные станции телекомплексов могут выполняться либо в виде программируемых (интеллектуальных) устройств, либо в виде устройств с жесткой логикой (неинтеллектуальные КП). В первом случае общая структурная схема для ЦСТ и ПСТ совпадает и станции отличаются лишь объемом памяти и набором функциональных модулей ввода—вывода и внешнего интерфейса. Неинтеллектуальные ПСТ предназначены преимущественно для необслуживаемых КП со сложными метеорологическими условиями.
Общая характеристика системы [30]
Назначение.
Система АИСТ является телеинформационно-управляющей системой для диспетчерского управления производством и распределением электроэнергии в энергосистемах. Основная область применения — диспетчерские пункты энергосистем и предприятий электросетей и связанные с ними крупные электростанции и высоковольтные подстанции (35 кВ и выше). Система АИСТ может также применяться при телемеханизации управления электроснабжением крупных промышленных предприятий, магистральными водо-, газо- и нефтепроводами и другими промышленными объектами.
Аппаратура системы АИСТ должна использоваться в комплексе с техническими устройствами, обеспечивающими сбор оперативной информации на контролируемых пунктах (КП), передачу по каналам связи, обработку, отображение и регистрацию полученной информации на пункте управления (ПУ), а также посылку команд телеуправления с ПУ и реализацию их на КП.
К таким устройствам относятся: автоматические датчики информации, аппаратура каналов связи, средства отображения общего и индивидуального пользования (диспетчерский щит с мнемосхемами, сигнальными символами, указывающими приборами, дисплеи), аппаратура управления (командно-квитирующие ключи на пульте, аппаратура телеуправления на КП).
Структура системы.
Система состоит из аппаратов пунктов управления (АПУ) и контролируемых пунктов (АКП). При этом подключение аппаратов КП предусматривается по многоточечной радиальной структуре ("один—Ν") и многоточечной магистральной структуре. Возможна и смешанная (кустовая) структура.
Многоточечная радиальная структура (рис. 5.2, а) обеспечивает непрерывный взаимонезависимый обмен информацией между пунктом управления и каждым пунктом по радиальным каналам связи ’’точка-точка”. В качестве КП могут использоваться как аппараты КП системы АИСТ (АКП АИСТ), так и приемо-передающие устройства телемеханики различных типов. Каждый АКП АИСТ может передавать информацию на несколько (до четырех) направлений.
Многоточечная магистральная и смешанная структуры (рис. 5.2, б) обеспечивают поочередный обмен информацией между ПУ и КП, объединенными общим магистральным каналом связи, и независимый обмен между ПУ и каждым КП, имеющим радиальные каналы связи.
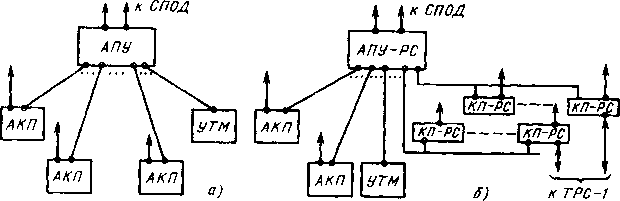
Рис. 5.2. Структура системы АИСТ:
а - радиальная многоточечная структура; б - смешанная радиально-магистральная структура; АПУ - аппарат пункта управления; АКП - аппарат контролируемого пункта; АПУ-РС, КП-РС - аппараты ПУ и КП для распределительных сетей; УТМ - устройство телемеханики; ТРС-1 — УТМ для распределительных сетей 10 кВ
Магистральная и смешанная структуры чаще встречаются на уровнях диспетчерского управления распределительными электрическими сетями (ДП ПЭС и РЭС). Поэтому соответствующая модификация аппаратуры системы АИСТ обозначается АИСТ—PC.
Каждая магистраль взаимонезависима. Аппарат КП—PC может работать на два независимых направления.
Подсоединение аппаратуры ПУ и КП к модемам каналов связи производится через канальные адаптеры, представляющие собой одноплатные микроЭВМ. Программа, записанная в ППЗУ канальных адаптеров, обеспечивает протокол обмена информацией по заданной структуре канала (радиальная или магистральная). Скорость передачи информации при радиальной структуре может устанавливаться равной 50, 100, 200, 300, 600 или 1200 Бод, при магистральной — 50, 100, 200 Бод. Всего в аппарате ПУ располагается до восьми канальных адаптеров. Таким образом, если один КА программируется по магистральной структуре, а остальные семь — по радиальной, то к каждому ПУ могут быть подключены до 32 КП—PC и 28 АКП; если два КА по магистральной структуре — то до 64 КП—PC и 24 АКП и т. д.
Аппаратура системы АИСТ сопрягается по каналам связи с приемопередающими станциями системы передачи оперативных данных (СПОД), выполняемых на базе микроЭВМ типа РПТ (производства ВНР) и типа СМ-1800, образуя с ними многоуровневую телеинформационно-управляющую систему. В этой многоуровневой системе аппаратура АИСТ АПУ наряду с микроЭВМ РПТ и СМ-1800 выполняет функции центральных приемо-передающих станций, устанавливаемых на диспетчерских пунктах соответствующих уровней управления, а аппаратура АИСТ АКП — функции интеллектуальных периферийных станций, устанавливаемых на энергообъектах.
Аппаратура ПУ имеет выход на дисплей и мини-ЭВМ по параллельному или последовательному интерфейсу. Скорость передачи информации в мини-ЭВМ в последовательной форме составляет 9600 бит/с.
Аппаратура КП—PC сопрягается через специально предусмотренный параллельный интерфейс с устройством ТРС-1, выпускаемым заводом ’’Электропульт” (г. Ленинград) и обеспечивающим телеконтроль и телеуправление объектами распределительной сети 6—10 кВ.
Принципы функционирования системы АИСТ.
Центральные аппараты системы АИСТ построены по принципу многопроцессорных микроЭВМ. Выполнение всех функций системы, а также заданных объемов и видов передаваемой информации обеспечивается соответствующими программами без изменения электронной схемы устройств.
В системе реализован принцип совместимости с устройствами и аппаратами телемеханики, находящимися в эксплуатации. В качестве периферийных станций могут использоваться как АКП системы АИСТ, так и полукомплекты КП устройств телемеханики различных типов (МКТ-1, МКТ-2, ТМ-512, TM-800 и др.).
При замене УТМ требуется изменить программу обмена информацией в соответствующем канальном адаптере ЦСТ. ЦСТ системы* АИСТ может ретранслировать информацию как в аналогичную станцию на базе АПУ АИСТ, так и в ЦСТ на базе микроЭВМ РПТ-70, РПТ-80 или СМ-1800. Принцип совместимости очень важен для внедрения в эксплуатацию бистемы АИСТ в условиях существующей системы сбора телеинформации, так как обеспечивает возможность поэтапного перехода к новой системе без перерыва информационного обеспечения.
В системе АИСТ осуществлен принцип интеллектуальных терминалов. Периферийная станция сама принимает решение о необходимости передачи в ЦСТ тех или иных сообщений в зависимости от состояния контролируемых процессов в текущий момент времени. Тем самым исключается передача излишней рутинной информации, повышается эффективность использования каналов связи, снижается загрузка ЦСТ и мини-ЭВМ, обрабатывающей телеинформацию. Система, обладающая свойством приспосабливаемости к текущей ситуации, называется адаптивной, а метод передачи информации в такой системе — адаптивным. Реализация адаптивного метода передачи определяется соответствующей программой.
Резервирование центральных станций и каналов связи. В системе АИСТ все периферийные станции, располагаемые на различных КП, обслуживаются общей центральной станцией (ЦСТ). Выход из строя центрального аппарата ЦСТ может привести к нарушению информационного обеспечения всего ПУ. Поэтому предусмотрено дублирование аппарата АИСТ АПУ. Оба аппарата нормально находятся в работе. Ввод информации в ЭВМ и ретрансляция на верхний уровень ведутся с одного из аппаратов ПУ. В случае его повреждения производится автоматическое переключение на другой АПУ.
Каналы связи от ПСТ к ЦСТ, как правило, также дублированы. Обмен информацией ведется по основному каналу, при неисправности которого приемное устройство в ЦСТ автоматически переключается на резервный канал.

Рис. 5.3. Структурные схемы аппаратов ПУ и КП системы ЛИСТ:
АПУ - центральный аппарат пункта управления; АКП - центральный аппарат контролируемого пункта; СК - спец-контроллер; ЦП - центральный процессор; ПОЗУ - узлы постоянной и оперативной памяти; АВК - блок визуального контроля; ККП - контроль канала и программатор; АПИ - адаптер параллельного интерфейса; АСИ - адаптер последовательного (серийного) интерфейса; СИ - модуль связного интерфейса; ЛУ - линейный узел; ТИС 16/64 - периферийный аппарат ввода ТИ и ТС на КП; ЩТИ-64 - периферийный аппарат (кассета) вывода ТИ на аналоговые приборы (АП); ШТС-128 - периферийный аппарат вывода сигналов ТС на диспетчерский щит (ДЩ)
Состав технических средств системы АИСТ
В состав технических средств системы АИСТ входят следующие аппараты:
центральный аппарат пункта управления — АПУ;
центральный аппарат контролируемого пункта — АКП (радиальная структура);
аппарат контролируемого пункта — КП—PC (магистральная структура);
периферийные аппараты:
ТИС 16/64 — аппарат ввода 16 аналоговых величин ТИ и 64 бит дискретной информации;
ЩТС-128 — аппарат вывода 128 сигналов ТС;
ЩТИ-64 — аппарат вывода 64 аналоговых ТИ;
РТУ-16 - аппарат выходных реле телеуправления;
Центральный аппарат АПУ и соответствующие периферийные аппараты образуют центральную станцию (ЦСТ) АИСТ. Центральный аппарат АКП с соответствующими периферийными аппаратами образует периферийную интеллектуальную станцию (ПСТ).
Структурные схемы аппаратов ПУ и КП системы АИСТ приведены на рис. 5.3.
Центральные аппараты АПУ и АКП содержат в своем составе спец- контроллеры СК, выполненные по принципу микроЭВМ,
Принцип работы аппаратов АПУ и АКП основан на программируемости всех выполняемых ими функций. Программы работы АПУ и АКП физически размещены в ПЗУ их спец-контроллеров.
Центральные аппараты системы АИСТ являются функционально и конструктивно законченными устройствами, выполненными в виде кассет со съемными печатными платами (модулями) .
Кассеты и модули (узлы) АПУ и АКП
Кассета спецконтроллера СК. Спецконтроллеры аппаратов АПУ и АКП унифицированы по номенклатуре модулей и отличаются лишь их
количеством; СК содержит следующий набор модулей: центрального процессора ЦП·, постоянной и оперативной памяти ПОЗУ·, параллельного интерфейса АПИ, канального адаптера КА, состоящего из узлов АСИ и ЛУ; визуального контроля АВК; контроля каналов и программатора ККП.
Модуль ЦП содержит: микропроцессор КП580ИК80А; генератор тактовых импульсов, стабилизированный кварцем; системный контроллер; восьмиуровневый контроллер прерываний; делитель частоты, формирующий для всех канальных адаптеров набор опорных частот для синхронизации приема и передачи, а также организации периодических прерываний процессора; ПЗУ емкостью 2 Кбайта, в котором размещены общесистемные программы (операционная программа реального времени, программы работы сервисных модулей, тестовые программы и т. п.); шинные формирователи системной магистрали СК.
Модуль ПОЗУ содержит семь сменных микросхем, ППЗУ по 2 Кбайта каждая и восемь микросхем ОЗУ также по 2 Кбайта; АПУ содержит два модуля ПОЗУ, а АКП — один. Таким образом, объем памяти СК АПУ составляет 28 Кбайт ППЗУ и 32 Кбайта ОЗУ. Соответственно АКП имеет в 2 раза меньший объем памяти.
Модуль АПИ обеспечивает ввод—вывод информации в параллельном виде с помощью микросхем параллельного интерфейса КР580ИК55. Число программируемых шин параллельного интерфейса — 48. Направление работы каналов ввода—вывода определяется программой, управляемой дуплексными шинными формирователями с перестраиваемым уровнем сигнала. Входные—выходные сигналы устанавливаются либо на уровне ТТЛ (”0” ≤ 0,3 В, ”1 ” ≥ 2,4 В), либо повышенного уровня 12 В с порогом 5 В. Перестройка осуществляется одной перемычкой для всех усилителей модуля. Модули АПИ организуют вторичные магистрали ввода—вывода для подключения периферийных аппаратов, а также обеспечивают подключение дисплеев и обмен информацией с мини-ЭВМ ОИК. Использование сигналов обмена повышенного уровня позволяет существенно повысить помехоустойчивость цепей ввода- вывода и увеличить длину вторичных магистралей до 200 м при скорости обмена до 1 Кбайт/с.
Аппарат АКП содержит один модуль АПИ, АПУ — четыре модуля АПИ.
Модуль КА состоит из двух узлов — адаптера сериесного интерфейса АСИ и линейного узла ЛУ. Канальный адаптер обеспечивает обмен информацией в последовательном коде по четырем независимым дуплексным каналам связи.
Аппарат АПУ содержит восемь канальных адаптеров (один из них входит в кассету СК, семь остальных — в кассету СИ). Таким образом обеспечивается возможность обмена информацией по 32 независимым дуплексным каналам связи.
Узел АСИ содержит микропроцессор КР580ИК80А, формирователь тактовых сигналов, системный контроллер, ППЗУ емкостью 2 Кбайта, ОЗУ емкостью 1 Кбайт, четыре универсальных программируемых синхронно-асинхронных приемопередатчика (УСАПП) на микросхемах сериесного интерфейса КР580ИК51 и логический узел обмена с ЦП. Каждый АСИ может быть запрограммирован по одному протоколу обмена информацией через все четыре канала связи.
Принятая во всех АСИ информация предъявляется ЦП в единой форме с единой адресацией независимо от разновидностей протоколов обмена информацией по каналам связи. Для обмена информацией между АСИ и ЦП используется общее поле памяти: ЦП имеет прямой доступ (ПДП) к процессорным магистралям узлов АСИ.
Узел ЛУ выполняет функции формирования входных и выходных линейных сигналов, гальванической развязки от канальных модемов, а также переключения на резервный канал связи в случае обнаружения неисправности основного канала. Синхронизация тактовых генераторов обслуживаемых устройств телемеханики, в том числе и не имеющих кварцевой стабилизации (например, МКТ-1, -2), обеспечивается программой.
Пульт визуального контроля (сервисный модуль) АВК предназначен для обнаружения и локализации аппаратных повреждений и проверки функционирования программ. Блок содержит цифровую шестнадцатеричную клавиатуру, 16 функциональных клавиш, 16-разрядное табло цифровой информации, восемь программно-управляемых светодиодов, контрольные гнезда, тумблеры, кнопки, вспомогательные светодиоды, а также регистр опознания адреса РА. При совпадении адреса на системной магистрали с содержимым регистра РА он формирует импульс ’’совпадение адреса”, который используется для выполнения специальных сервисных программ, а также для запуска осциллографа.
Модуль АВК позволяет оператору читать содержимое ПЗУ и ОЗУ, писать в ОЗУ короткие программы, вести их отладку, запускать сервисные программы и т. п.
Модуль контроля каналов и программатор ККП выполняет вспомогательные и сервисные функции контроля каналов связи и программирования ППЗУ. Он может быть включен как в спец-контроллер АПУ, так и в АКП, но поставляется только в составе АПУ. Модуль ККП позволяет контролировать любой из 32 основных и 32 резервных каналов, а именно: измерять преобладание, ’’дрожание” фронтов импульсов, отклонение скорости передачи от номинальной. Модуль ККП имеет разъем для установки микросхемы ППЗУ типов К573РФ1 или К573РФ2 и предусматривает операции записи и чтения информации.
Кассета связного интерфейса СИ является составной частью центрального аппарата АПУ. В кассете размещены семь канальных адаптеров, аналогичных канальному адаптеру, установленному в кассете спец- контроллера, и два модуля параллельного интерфейса АПИ. Магистраль кассеты СИ является продолжением системной магистрали СК.
Периферийные аппараты
Выполняются в виде самостоятельных конструкций (кассет или отдельных стоек), подключаются к центральным аппаратам АПУ или АКП через вторичные магистрали ввода—вывода и получают питание от их блоков питания.
Аппарат ШТИ-64 предназначен для вывода на щит 64 параметров ТИ в аналоговой форме. Кассета ЩТИ-64 является составной частью аппаратуры АПУ. Аппарат ЩТИ-64 представляет собой 64-канальный ЦАП с широтно-импульсной модуляцией, выходной ток 0—5 мА при сопротивлении нагрузки 0—2,0 кОм.
Интерфейс подключается ЩТИ-64 к модулю АПИ спец-контроллера СК, унифицирован с интерфейсом подключения периферийных аппаратов ЩТС-128.
Аппарат ЩТС-128 предназначен для вывода на диспетчерский щит 128 телесигналов (ТС). Информация ТС выводится группами по восемь ТС. Обеспечивает воспроизведение ТС по схеме светлого и мимического щита с миганием символов ТС при несоответствиях, с групповым квитированием сигналов, организацией проверки ламп, записи новых сигналов с блокировкой мигания и т. п. Выходные элементы — тиристорные оптроны, обеспечивающие ток до 100 мА при напряжении до 100 В и гальваническую развязку до 500 В.
Аппарат АПУ может управлять 16 аппаратами ЩТС-128, т. е. позволяет выводить на щит до 4048 сигналов ТС. Конструктивно аппараты ЩТС-128 представляют собой кассеты, которые комплектуются в отдельную стойку до шести кассет (аппаратов) в стойке. Завод выпускает также дополнительную стойку ЩТС-128С с установкой одного аппарата ЩТС-128 и возможностью установки дополнительного числа этих аппаратов (до шести).
Существенной особенностью периферийных аппаратов ЩТИ-64 и ЩТС-128 является то, что они унифицированы по интерфейсным связям со спец-контроллером СК и рассчитаны на подключение одновременно к двум резервирующим друг друга аппаратам АПУ через независимые интерфейсные узлы. Они могут принимать и воспроизводить информацию с одного из двух направлений. В такой системе повреждение любого элемента периферийных аппаратов, подключенных к магистрали, не мешает выполнению ею своих функций: повреждение обнаруживается системой и устраняется обслуживаемым персоналом без перерыва работы системы. При подключении аппаратов ЩТИ-64 и ЩТС-128 к общей магистрали ввода—вывода предусматривается вывод до 256 байт информации, т. е. если к выходной магистрали подключен один аппарат ЩТИ-74 (64 байта), то возможно подсоединение еще 12 аппаратов ЩТС-128 (192 байта), т. е. 1536 сигналов ТС.
Аппарат ТИС-16/64 предназначен для ввода 16 аналоговых величин от датчика ТИ и 64 ТС от контактных датчиков коммутационной аппаратуры. Схема опроса состояния контактов датчиков работает на напряжения 24 В и гальванически изолирована для каждого аппарата ТИС. Вместе с тем аппарат позволяет использовать датчики дискретных сигналов уровня ТТЛ. Это дает возможность ввода информации от стандартных цифровых приборов, например от частотомера Ф246 и вольтметров Ф219.
Для ввода параметров ТИ используется 16 индивидуальных АЦП с гальванической развязкой входов. Диапазоны входного тока 0—5 мА и —5 + 5 мА при входном сопротивлении 1 кОм. Число двоичных разрядов — восемь. Основная приведенная погрешность 0,6%, время преобразования 40 мс.
Кодирование сообщений и протокол обмена информацией в системе АИСТ (радиальная многоточечная структура)
Виды передаваемых сообщений
Информация, циркулирующая в системе АИСТ, подразделяется на рабочую и служебную. К рабочей информации относятся сообщения, определяющие рабочие функции системы:
ТИ — телеизмерение текущих значений от аналоговых и цифровых датчиков;
ТС — телесигнализация положения двухпозиционных объектов;
ТСЧ (телесчет) — передача показаний счетчиков электроэнергии от специальных датчиков телеизмерения энергии (ТИЭ) в системе АИСТ-РС;
ТУ — телеуправление двухпозиционными и многопозиционными объектами в системе АИСТ—PC;
ЦБИ — цифро-буквенная информация;
РТИ, РТС — ретрансляция ТИ и ТС на ДП вышестоящего уровня диспетчерского управления;
РТУ — ретрансляция команд телеуправления на КП нижестоящего уровня (в системе АИСТ—PC).

Рис. 5.4. Структура кода АИСТ
Служебная информация объединяет сообщения о режимах передачи, квитанции и пр.
Передача сообщений от всех КП к ПУ производится по независимым дуплексным каналам связи непрерывно в обоих направлениях (от КП к ПУ — прямой и от ПУ к КП — обратный каналы). При этом используется синхронный метод передачи сигналов. Длина одного сообщения (кодового слова) составляет 24 бита, последовательность из 32 кодовых слов образует кадр (рис. 5.4). Первое кодовое слово ’’МАРКЕР” служит для синхронизации кадров и образуется 24-битной комбинацией 0110 0110 0110 1001 1001 (число 666999 в двоично-шестнадцатеричном коде). Расстояние Хэмминга для маркерного слова равно 6 (’’Прозрачный” маркер).
Код АИСТ
Все сообщения кодируются специальным кодом АИСТ (групповой помехозащищенный код с кодовым расстоянием d = 4). Длина кодовых слов 24 бита, из которых 16 информационных и 8 контрольных; 24 разряда кодового слова разбиваются на три байта (рис. 5.4): первый байт — адрес слова (а1 ,а2, а3, а5, а6, а7, а9, а10), второй байт — информация (а11, а13, а14, а15, а17, а18, а19, а21), третий байт — защита (а4, а8, а12, а20, а21, а22, а23)·
Защитные (контрольные) символы определяются следующими проверочными уравнениями (знак ”+” означает сумму по модулю 2):
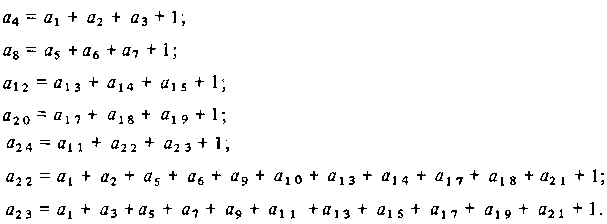
Таблица 5.1. Протокол АИСТ: коды сообщений по прямому каналу (с нижнего уровня на верхний)
№ п.п. | Наименование сообщения | Обозначение | Формат | Кодо |
1-й байт | ||||
1 | Маркер | М | 24 | 66 |
2 | Предмаркер | пм | 24 Х3 | 55 |
3 | Телесигнализация (в том числе по вызову) | ТС- (ТСВ) | (24,16) | Адрес 00-КК |
4 | Телеизмерения (в том числе по вызову) | ТИ (ТИВ) | (24,16) | (КК + 1) - |
5 | Цифро-буквенная информация | ЦБИ | Блок: 24 (L + 2) |
|
| Начало блока | НЦБИ | (24, 16) | FE |
| Информация ЦБ И | ЦБИ | (24,16) | .FF |
| Конец блока | КЦБИ | (24, 16) | .FF |
6 | Заявка на передачу | ЗяЦБИ | (24,16) | .FB |
7 | Запрос ЦБИ по обратному каналу (сверху) | ЗпЦБИ | (24, 16) | .FB |
8 | Квитанция о приеме ЦБИ | КвЦБИ | (24, 16) | .FB |
9 | Переспрос ЦБИ при сбоях в канал | ПЦБИ | (24, 16) | .FB |
10 | Извещение об отсутствии обратного канала | ПОК | (24, 16) | .FD |
И | Извещение о восстановлении обратного канала | ВОК | (24, 16) | FD |
12 | Квитанция перехода на резервный путь передачи (запасной) | КвЗП | (24, 16) | .FD |
13 | Переспрос слов, переданных по обратному каналу | ПСЛ | (24,16) | •FC |
14 | Извещение об отсутствии приема по одному из каналов с нижнего уровня | ОПКН | (24, 16) | •FA |
15 | Извещение о восстановлении канала, поврежденного по п. 14 | ВПКН | (24, 16) | .FA |
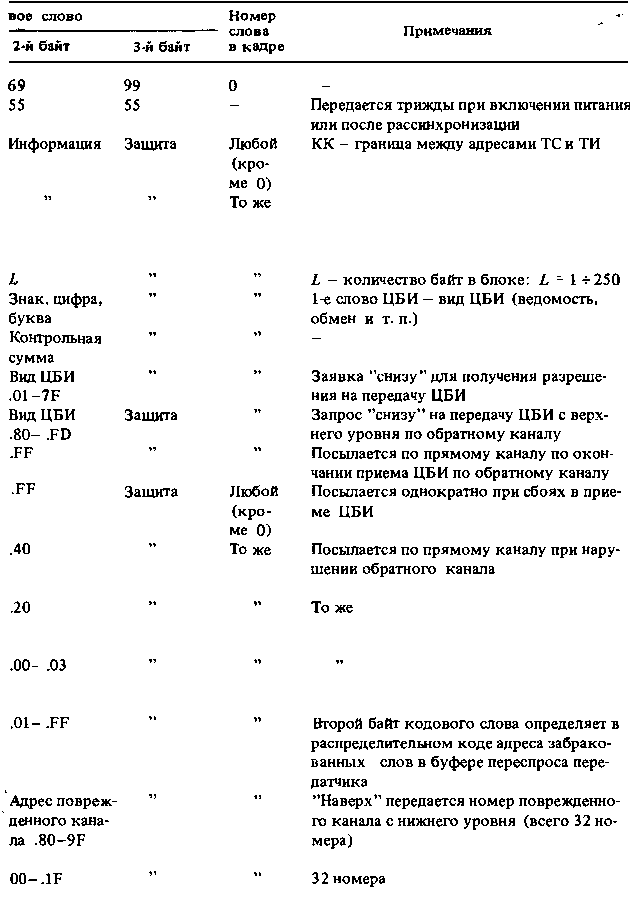
№ п.п. | Наименование сообщения | Обозначение | Формат | Кодо |
1-й байт | ||||
16 | Квазициклическая передача | КВЦКЛ | (24, 16) | 00-.F8 |
17 | Циклическая передача | ЦИКЛ | (24,16) | 00-.F8 |
18 | Отсутствие информации | ОИ | (24,16) | .FD |
Кодирование и передача ТИ, ТС.
Каждый параметр ТИ или группа из 8 ТС кодируется одним кодовым словом (24, 16), содержащим 8 бит адреса ТИ (или группы ТС), 8 информационных бит (256 дискретных уровней параметра ТИ либо 8 двухпозиционных ТС) и 8 контрольных бит. Таким образом, с каждого КП может передаваться до 256 байт (ТИ + ТС). Предусмотрена возможность передачи двух байтных ТИ, для чего используются два следующих подряд кодовых слова с заранее установленными адресами.
Сообщения ТИ и ТС передаются адаптивному алгоритму. Адаптивный алгоритм для ТС состоит в однократной (спорадической) передаче кодового слова, соответствующего группе из 8 ТС, в котором изменился хотя бы один сигнал ТС. Адаптивный алгоритм для ТИ может быть двух видов. Первый алгоритм состоит в поиске и передаче наиболее отклонившегося параметра по сравнению с ранее переданными значениями. Второй алгоритм — поочередная передача параметров ТИ, отклонившихся от ранее переданных значений на заданную величину (апертуру).
При этом для обоих алгоритмов все ТИ могут быть разбиты на одну, две или три группы, причем каждая группа может иметь свою апертуру допустимого отклонения. В первой группе располагаются наиболее важные ТИ, которым задается наименьшая апертура, затем менее важные и т. д. Разбивка на группы и установка апертуры выполняется пользователем в соответствии с технологической важностью параметров.
Прием сообщений ТИ и ТС производится по методу отрицательного квитирования: квитанция посылается по обратному каналу только при обнаружении ошибки в принятом кодовом слове. В результате приема этой квитанции передатчик должен повторить забракованное слово, т. е. отрицательная квитанция выполняет функцию переспроса забракованной информации.
Для возможности адаптивной передачи информации ТИ и ТС при отсутствии обратного канала, а также для повышения надежности передачи предусмотрена передача ТИ — ТС в режиме квазицикла. Для этой цели выделены кодовые слова № 7 и № 23 в кодовых предложениях. На этих местах передаются принудительно (независимо от величины изменения) очередные параметры ТИ (или группы ТС), благодаря чему значения всех параметров принудительно обновляются с периодом длинного ’’квазицикла”.
Продолжение табл. 5.1
вое слово | Номер слова в кадре | Примечания | |
2-й байт | 3-й байт | ||
00-.FF |
| 7,23 | По очереди передаются все ТИ и ТС на словах № 7 и № 23 |
00-.FF | ** |
| По очереди передаются все ТИ и ТС |
.30 |
| 7,23 | Посылается при отсутствии новой информации |
Имеется также возможность передачи всего объема ТИ, ТС в циклическом режиме передачи. Для этой цели по обратному каналу (’’сверху”) посыпается команда КЦКЛ — перейти в циклический режим. По окончании выдачи полного объема восстанавливается режим адаптивной передачи. Для упорядочения формирования массивов адреса с 00 до КК присваиваются ТС, с КК + 1 до .F8 - ТИ. Граница КК может быть в любом месте (табл. 5.1).
В обратном канале сообщений ТИ, ТС ввиду небольших объемов обычно передаются циклически. При необходимости может быть организована приоритетная передача тех или иных адресов параметров ТИ,ТС.
Рис. 5.5. Схема организации обходного канала через ЦСТ1 при повреждении прямого канала с ЦСТ2:
КЗП - команда перехода на запасной канал; КвЗП - квитанция перехода на запасной канал; DI, D2 - информация от ДП1 и ДП2

3 Передача по обратному каналу.
Виды передаваемых сообщений по обратному каналу (с верхнего уровня на нижний) и их коды в основном такие же, как и в прямом канале. Основные отличия состоят в следующем:
- на месте маркера может посылаться слово переспроса ПСЛ поврежденного слова (в целях снижения времени переспроса);
- основная информация ТИ—ТС передается циклически (ввиду ее меньшего объема, чем при передаче по прямому каналу). Квазициклическая передача отсутствует;
- предусмотрены передачи различных команд изменения режима работы передатчика нижнего уровня:
КЗП — команда перехода на запасной путь передачи; передается при приеме сообщения об отсутствии приема по прямому каналу. Запасной путь может быть реализован при наличии канала связи между станциями нижнего уровня (рис. 5.5);
ОКЗП — команда отмены КЗП;
КЦКЛ — команда передатчику нижнего уровня перейти в циклический режим передачи;
ВТИС — вызов ТИ или ТС по адресам вызываемых параметров.
В обратном канале сообщения ТИ, ТС ввиду небольших объемов обычно передаются циклически. При необходимости может быть организована приоритетная передача тех или иных адресов параметров ТИ, ТС.
Цифро-буквенная информация. ЦБИ в прямом и обратном каналах передается одинаково в виде ’’блока ЦБИ”. Блок ЦБИ состоит из кодовых слов (24,16) кода АИСТ и имеет следующую структуру:
начало блока (НЦБИ) — первое кодовое слово блока ЦБИ, в котором передается байт начала (.FF) и байт числа (£) передаваемых информационных слов ЦБИ;
информационное слово ЦБИ. Каждое информационное слово содержит признак ЦБИ (.FF) и байт цифро-буквенной информации;
контрольная сумма — последнее кодовое слово блока ЦБИ, содержит признак ЦБИ и число переданных слов ЦБИ.
Перед началом ЦБИ передатчик и приемник обмениваются служебными словами. Если передатчик передает ЦБИ по своей инициативе, то он посылает заявку ЗяЦБИ для получения разрешения на передачу. Если приемник готов принять информацию, то он отвечает тем же кодом ЗяЦБИ, после чего следует передача блока ЦБИ.
Таблица 5.2. К определению номеров переспрашиваемых слов

Станция ЦСТ может запросить информацию ЦБ И со смежного уровня (нижнего или верхнего). Для этого посылается запрос на получение ЦБИ, содержащий тот вид информации, который требуется получить (ЗпЦБИ). Передатчик получает ЦБИ от мини-ЭВМ ДИС и передает в канал связи.
По окончании приема блока ЦБИ в обратный канал посылается квитанция КвЦБИ, которая сообщает передатчику ЦБИ о нормальном приеме. В случае сбоя при приеме ЦБИ посылается переспрос ЦБИ (ПЦБИ), после чего следует повторная передача всего блока ЦБИ, при этом передача повторяется только один раз. Если при повторной Передаче опять фиксируется сбой, то приемник и передатчик фиксируют сбой ЦБИ. Протокол передачи ЦБИ рассчитан на дуплексную связь между станциями.
Служебная информация СЛИ.
Все виды служебной информации передаются как однословные сообщения в коде АИСТ (24, 16). Соответствие отдельных видов служебной информации кодовым комбинациям кода (24, 16) дано в табл. 5.1.
5 | 6 | 7 |
5 | 6 | 7 |
.05 | .06 | .07 |
13 | 14 | 15 |
.0D | ,0Е | .0F |
21 | 22 | 23 |
.15 | .16 | 17 |
29 | 30 | 31 |
.1D | .1Е | .IF |
00010000 | 00100000 | 01000000 |
Переспрос забракованного кодового слова — ПСП.
При приеме информации выполняется проверка принятого слова в соответствии с кодовой защитой. В случае обнаружения ошибки принятое слово бракуется и приемная станция по обратному каналу посылает слово переспроса ПСЛ забракованной информации. В ответ на этот переспрос повторяется передача забракованного слова. Переспрос забракованного слова осуществляется следующим образом. Передатчик и приемник информации имеют счетчики слов, которые фиксируют номера переданных (и соответственно принятых) кодовых слов в кадре. Счет слов начинается от маркера и содержит 31 номер (.00 т- .1F). В нормальных условиях счетчики слов работают синхронно. В передающем устройстве имеется буферное запоминающее устройство (БЗУ), рассчитанное на запоминание последних (по времени) восьми кодовых слов, переданных по каналу связи. Каждому слова соответствует одна из восьми ячеек БЗУ. В каждой ячейке БЗУ записанная информация обновляется с периодом, равным восьми словам,
В 0-й ячейке БЗУ может быть записана информация по переданному слову № 0 (по счетчику слов), либо № 8, либо № 16, либо № 24 (соответственно № .0; .8; .10; .18); в 1-й ячейке соответственно слова № 1,9, 17,25 (№.1; .9; .11; .19) и т. д.
Соответствие номеров ячеек БЗУ и номеров переданных слов по счетчику слов дано в табл. 5.2.
Кодовое слово переспроса ПСЛ содержит признак переспроса (один байт .FC) и байт номеров ячеек БЗУ в распределительном коде, из которых информация должна быть передана вновь. Распределительный код принят для того, чтобы в одном байте можно было послать переспрос более чем одного слова (в пределе до восьми слов). Необходимость переспроса более чем одного слова одним словом ПСЛ вызвана тем, что к моменту посылки ПСЛ по обратному каналу приемник может зафиксировать искажения более чем одного слова, особенно если учесть, что посылка ПСЛ может задерживаться из-за занятости в данный момент обратного канала. Формируется распределительный код запроса следующим образом.
В двоичном восьмиразрядном номере принятого слова, соответствующем забракованному слову, отбрасываются четыре старших разряда. Оставшиеся четыре младших разряда записываются в виде байта распределительного кода. Например: пусть повреждено кодовое слово № 21 (.15). Двоичный номер этого слова 00010101, оставшиеся четыре младших разряда 0101, т. е. цифра 5. Соответствующий байт распределительного кода: 0001 0000. Если кроме № 21 повреждено также и слово № 23 (.17), то соответствующий распределительный код этого слова будет 01000000, а результирующий байт распределительного кода составит 01010000. Всего в одном слове ПСЛ может быть передано одновременно до восьми адресов номеров ячеек БЗУ с забракованными словами (в двоично-шестнадцатеричном коде от .01 до .FF). Таким образом, во втором байте слова ПСЛ будет столько единиц, сколько обнаружено поврежденных слов до момента передачи ПСЛ. Описанный протокол переспроса рассчитан на работу по дуплексному каналу с равными и различными скоростями передачи сигналов в обоих направлениях.
При браковке приемником трех слов подряд прием информации прекращается до прихода маркерного слова и сигнализируется повреждение канала. После приема маркера информация начинает приниматься вновь, сигнал повреждения снимается.
Таблица 5.3. Приоритеты сообщений. Прямой канал
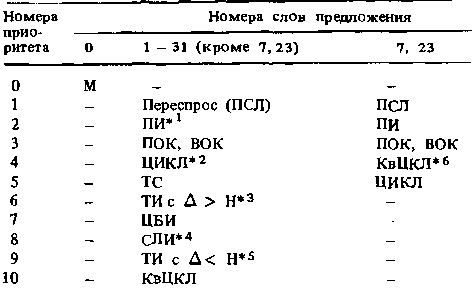
*1 Повторная информация (результат переспроса по обратному каналу).
*2 Циклическая передача ТИ-ТС по запросу или после включения питания.
*3 Телеизмерения с отклонением Δ больше заданной апертуры Н.
*4 Прочая служебная информация.
*5 Телеизмерения с отклонением Δ меньше заданной апертуры Н.
*6 Передача по квазициклу (см. п. 16 табл. 5.1).
Маркерные сигналы. В режиме нормальной работы приемных и передающих станций (режим синхронной работы) прием маркера (М) всегда производится на определенном слове кодового кадра (слово № 0). При отсутствии маркера на своем месте приемник ждет следующего нормального маркера в течение трех-четырех предложений подряд. При отсутствии маркера в течение этого времени производится перезапуск передачи по данному направлению. В результате перезапуска приемник переходит в режим ожидания маркера, а передатчик передает три предмаркера (ПМ) и затем М. Если синхронная работа не восстановится, то приемник выдает сигнал о повреждении канала приема. После восстановления приемного канала по каналу обратного направления передается сообщение о восстановлении приемного канала.
При включении (восстановлении) питания передатчик трижды посылает ПМ и затем М. В прямом канале при этом начинается выдача информации ТИ—ТС в циклическом режиме. После выдачи полного объема ТИ—ТС передатчик переходит в адаптивный режим работы.
Дополнительные служебные сообщения. Отсутствие нормального приема по данному направлению сопровождается сообщением, передаваемым передатчику, о нарушении канала приема и соответствующим сигналом для обслуживающего персонала приемной станции. При восстановлении приема передается сообщение со снятием соответствующего сигнала повреждения.
При отсутствии информации по одному из прямых каналов приемная станция верхнего уровня может передать по обратному каналу связи команду о переходе на резервный (дополнительный) путь передачи. После выполнения команды станция нижнего уровня посылает сообщение о переходе на резервный путь передачи КвЗП (см. рис. 5.5).
В приемном устройстве кроме кодовой защиты (работа которой приводит к переспросу кодового слова) имеется защита от искажений длительности принимаемых из канала связи сигналов (так называемая фазовая защита). При работе фазовой защиты выдается сигнал, отмечающий неудовлетворительное состояние канала связи.
Приоритеты передачи сообщений. Порядок передачи сообщений определяется заданной приоритетностью сообщений и адаптивным алгоритмом отбора кодовых слов. На определенных номерах кодовых слов кадра порядок передачи изменяется. Кроме того, имеется некоторое отличие в порядке передачи сообщений для прямого и обратного каналов. В табл. 5.3 приведены номера приоритетов сообщений. При одновременном возникновении сообщений, подлежащих передаче на данном номере кодового слова, раньше передаются сообщения с меньшим порядковым номером приоритета.
В прямом канале связи все кодовые слова кадра, кроме № 0, 7 и 23, имеют одинаковые приоритеты сообщений. Слово № 0 отведено только для передачи маркерного слова М. В этом смысле маркер М обладает на слове № 0 нулевым (безусловным) приоритетом.
Слова № 7 и 23 отведены для передачи информации ТИ и ТС из квазицикла. Поэтому номера приоритетов сообщений на них иные, чем на всех остальных словах № 1—31.
Система АИСТ—PC
Основная область применения АИСТ—PC — телемеханизация диспетчерского управления распределительными электрическими сетями 35— 220 кВ. Для этого уровня управления характерны магистральная и смешанная структуры каналов связи.
При магистральной структуре КП подключается к общему каналу связи по вызову.
Система АИСТ—PC содержит один или два (для большей надежности) аппарата АПУ—PC, выполняющих функции ЦСТ на ДП РЭС или ДП ПЭС, и N аппаратов КП—PC, располагаемых на подстанциях КП. Кроме того, на ДП устанавливаются аппараты ЩТС-128 для связи АПУ—PC с диспетчерским щитом, на КП — аппараты РТУ для сопряжения КП—PC с объектами ТУ.
Аппаратура АИСТ АПУ—PC выполняется на базе аппаратуры АИСТ АПУ с той лишь разницей, что в последней на месте двух (из восьми) канальных адаптеров устанавливаются модули ТУ. В остальном устройства АИСТ АПУ и АПУ—PC отличаются лишь программами.

Рис. 5.6. Структурная схема подключения КП—PC к канальному адаптеру АПУ—PC в системе АИСТ-РС:
КА - канальный адаптер; ПД - канал передачи; ПР - канал приема; М - модем; К - канальный ключ
Таким образом, АПУ—PC располагает шестью КА. Два из них предназначены для обслуживания КП—PC с магистральной структурой каналов связи. К каждой магистрали может быть подключено до восьми аппаратов КП—PC. Всего к двум КА может быть подключено до 64 КП—PC, объединенных восемью магистралями по восемь КП—PC на каждой магистрали. Остальные четыре КА используются для связи со станциями по радиальной структуре каналов в протоколе системы АИСТ. Все магистрали, так же как и радиальные каналы, взаимонезависимы.
Структурная схема подключения аппаратов КП—PC к одному из четырех дуплексных каналов КА АПУ—PC при магистральной структуре канала приведена на рис. 5.6. АПУ—PC осуществляет поочередный адресный опрос КП—PC, приемники которых подключены параллельно к каналу ПУ—КП (несущая частота). Передатчики КП—PC подключаются к ответному каналу (несущая частота/)) через канальные ключи по мере запроса соответствующего КП. Каждый аппарат КП—PC может выдавать информацию одновременно по двум независимым направлениям (например, на ДП РЭС и ПЭС) в протоколе АИСТ-РС.
Аппарат КП—PC выполняет роль интеллектуальной периферийной станции и содержит две кассеты: спец-контроллера и ввода—вывода СК ВВ и блока питания БП.
В состав кассеты СК ВВ входят следующие узлы (модули), такие же как в аппарате АПУ и АКП;
ЦП — узел центрального процессора — 1 шт.;
АПИ — узел параллельного интерфейса — 1 шт.;
АВК — пульт адаптера визуального контроля — 1 шт.
Кроме того, имеются специальные модули КП—PC:
ПАСИ — узел памяти и сериесного интерфейса — 1 шт. (содержит 4 Кбайт ПЗУ и 4 Кбайт ОЗУ и два УСАПП КР580ВВ51);
ТУ - узел вывода 16 команд ТУ - 1 шт.;
ТС 32 - узел ввода 32 сигналов ТС — 1 шт.;
ВДТИ - узел ввода ТИ - 4 шт.;
АЦП — узел общей части АЦП — 1 шт.
В состав кассеты входят:
ЛУ — узел линейных узлов — 2 шт.;
КК - субблок канальных ключей - 1 шт.;
субблоки питания со стабилизаторами разного уровня напряжения и узел визуального контроля БП.
Протокол обмена информацией в системе АИСТ—PC.
В основу протокола обмена положен асинхронный метод передачи со стандартным) форматом (11, 8). В качестве кодового слова используется следующая конструкция (табл. 5.4).
Инициатива обменом информацией между ПУ и КП принадлежит АПУ—PC, который посылает по каналу ПУ-КП сообщение запрос-задание, содержащее адрес КП, с которым ПУ вступает в диалог, и вид (содержание) диалога. Получив запрос—задание, соответствующий КП со своим адресом посылает ответ—сообщение. Информационный байт запрос—задание (от ПУ к КП) имеет следующий вид:
биты Z)7 D6 Ds — адрес КП (всего восемь адресов);
значения битов D4—D0 соответствуют следующим сообщениям:
| D4 | D3 | D2 | D1 | Do | |
0 | 0 | 0 | 0 | 0 | запрос всей информации КП |
0 | 0 | 0 | 0 | 1 | признак ТУ |
0 | 0 | 0 | 1 | 0 | запрос ТС |
0 | 0 | 1 | 0 | 0 | запрос 1 гр. ТИ (ТИ1) |
0 | 1 | 0 | 0 | 0 | запрос 2 гр. ТИ (ТИ2) |
0 | 1 | 1 | 1 | 1 | запрос (ТС + ТИ) |
1 | 0 | 0 | 1 | 0 | запрос ТИЭ |
1 | 0 | 1 | 0 | 0 | запрос РТС1 |
1 | 1 | 0 | 0 | 0 | запрос РТС2 |
1 | 1 | 1 | 1 | 0 | установка часов |
Для большей надежности и соблюдения правильной последовательности подключения передатчиков КП кодовое слово запрос-задание передается 2 раза подряд (рис. 5.7). Получив первое слово, передатчик соответствующего КП подключается к каналу связи и выдает в него ’’единицу”. После получения второго слова, точно совпадающего с первым, КП посылает ответ—сообщение. Содержание байта ответ—сообщение:
биты D7, D6, D5 — адрес КП;
Таблица 5.4. Кодовое слово АИСТ-РС

значение D4— Do битов соответствуют следующим сообщениям:

В зависимости от содержания ответа— сообщения далее передаются слова соответствующих сообщений: байты ТС, ТИ, РТС или ТИЭ (параметр ТИЭ содержит два байта). Новые сообщения передаются только при наличии в них новой информации. Каждый цикл сообщений от КП заканчивается контрольным байтом, в котором передается контрольная сумма, и установкой контрольной 1 до момента отключения передатчика от канала связи. При этом все КП опрашиваются поочередно.
Команда ТУ передается посылкой с ПУ двух слов: номера КП с признаком ТУ и кодового слова ТУ. Информационный байт кодового слова ТУ следующий:
D7D6 — ”10” операция ВК, ”01 ” операция ОТ;
D5 - ”1 ” команда ТУ, ”0” команда РТУ;
D4D3 — 16 команд ТУ;
D0 — ”1” признак ТУ.

Рис. 5.7. Временная диаграмма команды ТУ АИСТ-РС:
ПУ-КП - сигналы в канале от ПУ к КП; КП-ПУ - сигналы в канале от КП к ПУ
В ответе—сообщении КП сообщает свой номер и признак ’’готов к приему ТУ”. Затем следует ответный байт ТУ, точно соответствующий принятому первому байту ТУ. В канале связи КП—ПУ устанавливается 1, а с ПУ передается повторное слово ТУ. При точном совпадении с принятой ранее командой ТУ она выводится на исполнение. В программе предусматривается выдержка времени ’’ожидание исполнения команды” Δt ТУ, после которой начинается передача сообщений ТС.
Посылка кодовых слов от ПУ к КП и обратно в режиме ТУ иллюстрируется временной диаграммой на рис. 5.7.
Математическое обеспечение системы АИСТ
Математическое обеспечение (МО) включает в себя программы: общесистемные реального времени (РВ), функционально-тестовые, сервисные и прикладные.
Общесистемные программы образуют упрощенную операционную систему РВ, которая управляет таймером, прерыванием, диспетчеризацией приоритетов задач различных уровней. Операционная система РВ поставляется заводом-изготовителем в виде запрограммированной микросхемы ППЗУ № 00, устанавливаемой на плате ЦП.
Функционально-тестовые программы предназначены для контроля правильности выполнения основных функций аппаратуры и выявления неисправностей системы в процессе ее эксплуатации путем набора тестов различных модулей и узлов системы. Контрольно-тестовые функции реализуются оператором с помощью сервисных блоков АВК, входящих в состав АПУ и АКП. Блок АВК содержит цифровую шестнадцатеричную клавиатуру, 16 функциональных клавиш, шестнадцатеричное табло цифровой индикации, программно управляемые светодиоды. Функционально-тестовые программы поставляются в виде запрограммированной микросхемы ППЗУ, установленной на плате ПОЗУ.
Прикладные программы (пользовательские) обслуживают периферийные аппараты, канальные адаптеры, а также выполняют первичную обработку принимаемой и передаваемой информации. Прикладные программы реализуются в ППЗУ центрального процессора и КА и поставляются в виде запрограммированных микросхем для стандартного набора периферийных устройств и типов обслуживаемых УТМ.
В процессе проектирования или эксплуатации системы пользователю предоставляется возможность внесения изменений или дополнении в систему МО, например для подключения к канальному адаптеру УТМ, не предусмотренного в МО, которое поставляется заводом-изготовителем. Для этой цели в АПУ предусмотрен узел ККП (он может быть включен и в АКП), который содержит программатор для записи в микросхемы ППЗУ К573РФ2. Этими же средствами в ППЗУ записываются табличные данные, с помощью которых аппаратура системы АИСТ настраивается на определенный объект эксплуатации: таблицы переадресации информации, объем и скорость передачи информации и т. п.
Конструкция аппаратуры АИСТ и основные технические данные
Все аппараты системы АИСТ располагаются в базовых стативах размером 1800 х 600 х 250 мм. В один статив устанавливается до шести кассет разного типа: специального контроллера, сериесного интерфейса цифро-аналоговых преобразователей ЩТИ-64, блоков питания, аппаратов ЩТС-128 и ТИС 16/64. Кассеты имеют съемные платы с печатным монтажом, представляющие собой функционально законченные узлы схемы (модули).
Аппарат КП—PC располагается в настенном стативе размером 620 х х 600 х 250 мм.
Информационная емкость пункта управления на базе центральной станции АИСТ АПУ:
число радиальных дуплексных каналов связи — до 32 (с автоматическим переключением на резервные каналы);
число обслуживаемых КП — до 32;
общая емкость принимаемой информации ТИ—ТС — до 1000 байт. Информационная емкость одного КП:
ТИ — до 128 байт;
ТС — до 1024 бит.
Информационная емкость пункта управления на базе центральной станции АИСТ АПУ-РС:
число магистральных дуплексных каналов связи — до 8;
число обслуживаемых КП—PC — до 64;
число радиальных дуплексных каналов связи — до 16.
Информационная емкость одного КП-РС:
ТИ — до 16 байт;
ТС — до 32 бит;
ТИЭ — до 16 параметров;
ТУ с двухпозиционными командами — до 16 объектов;
РТС - до 64 бит;
РТУ — до 16 объектов.
Интерфейсы ввода—вывода. Аналоговые входы:
входной ток — 5+5 мА или 0—5 мА;
входное сопротивление 1 кОм;
разрядность 8 бит, класс точности 0,6;
в аппарате КП—PC аналоговые входы имеют общую точку, соединенную с нулевой шиной аппаратуры;
в аппарате ТИС 16/64 аналоговые входы изолированы друг от друга и от общих узлов, уровень изоляции 100 В.
Аналоговые выходы:
выходной ток 0—5 мА;
сопротивление нагрузки 0—2,5 кОм;
выходной сигнал — широтно-импульсный;
разрядность 8 бит, класс точности 0,4.
Входы от контактных датчиков:
напряжение — 24 В;
ток через контакт — 3 мА;
все датчики имеют общую точку, входная схема изолирована от общих узлов оптронами, уровень изоляции 400 В.
Входы от бесконтактных датчиков — высокоуровневые и низкоуровневые
Для высокоуровневых входов могут быть использованы бесконтактные датчики любой полярности при тех же параметрах, что и контактные датчики; для низкоуровневых входов — сигналы транзисторнотранзисторной логики; ток через датчик в состоянии 0—0,7 мА; помехоустойчивость 0,4 В.
Выходы на лампы ТС диспетчерского щита:
напряжение — не более 100 В;
ток постоянный — не более 100 мА;
общая шина ’’минус”;
выходная схема изолирована от общих узлов, уровень изоляции 500 В.
Выходы телеуправления:
контактная схема выхода с реле РП21;
стандартная схема с изоляцией выходных цепей каждого объекта ТУ;
имеется цепь блокировки АПВ.

Рис. 5.8. Телекомплекс ГРАНИТ, возможные структуры соединений между ПУ и КП
Общие сведения
Телекомплекс ГРАНИТ разработан СКТБ ’’Промавтоматика” ПО ’’Электроизмеритель” Минприбора СССР . Промышленный выпуск осуществляется заводом ’’Промавтоматика” (г. Житомир). Телекомплекс предназначен для построения телемеханических систем широкого применения: в энергетике, на объектах добычи и транспорта газа, на промышленных комбинатах, в горнодобывающей промышленности, коммунальном хозяйстве и т. п. [31].
Устройства пункта управления телекомплекса характеризуются наличием двух встроенных микроЭВМ (типа ЭЛЕКТРОНИКА-60), обеспечивающих программное управление сбором, передачей, приемом, обработкой и отображением всех видов телеинформации. Благодаря программному управлению устройства ПУ именуются интеллектуальными пунктами (ИП) системы. С целью повышения надежности и производительности обе микроЭВМ работают независимо друг от друга. Базы данных обеих микроЭВМ корректируются по межмашинному обмену текущей телеинформацией, получаемой из каналов связи.
Устройства КП телекомплекса выполняются в виде схемных (неинтеллектуальных) аппаратов. Они, как правило, устанавливаются на необслуживаемых пунктах и обеспечивают ввод, вывод и ретрансляцию разнообразной телеинформации без ее представления местному персоналу.
Комплекс ГРАНИТ может включать в себя различное число ПУ и КП при условии, что их общее число не превышает 128. Соединение между ПУ и КП возможно радиальными, магистральными и транзитными каналами связи (рис. 5.8). Число радиальных направлений с ПУ — до 128. Число КП на одном направлении при магистральной структуре — до 16. Транзитные (цепочные) линии связи обеспечивают двухнаправленную ретрансляцию информации между КП, число которых в цепочке не должно превосходить 10—15.
Наиболее важные радиальные каналы связи могут дублироваться.
Уплотненные каналы связи организуются внешними модемами (М), не входящими в состав аппаратуры телекомплекса, подсоединение модемов — по стыку С2.
Методы передачи и кодирования сообщений
Сообщение с КП на ПУ передается в двух режимах: либо по запросу (вызову) с ПУ, либо автоматически — при изменении ТС или ТИТ по сравнению с ранее переданными значениями. Приемник должен подтвердить полученную информацию посылкой квитирующего сигнала по обратному каналу (положительное квитирование). При отсутствии квитанции в течение 5—10 с источник информации автоматически повторяет несквитированную информацию.
Обмен информацией между пунктами передачи и приема осуществляется по методу синхронной передачи данных в соответствии с протоколом HDLC. Сеанс связи начинается с обмена служебными кадрами между передающей и приемной станциями. Служебный кадр содержит 6 байт (рис. 5.9, а).
Первый и последний байты флаг предназначены для обозначения начала и конца кадра. Флаг всегда передается фиксированным значением 011111110 и выполняет роль синхрокода (маркера), Во всей передаваемой последовательности бит только маркер имеет шесть единиц подряд. Во всех остальных байтах через каждые пять следующих подряд единиц вставляется 0 (эта операция называется бит-стаффинг), чтобы отличить маркер от всех остальных видов сообщений. Такой маркер называется прозрачным, т. е. легко отличимым в последовательности передаваемых бит.
Байт адрес содержит адрес отправителя (получателя) сообщений.
В байте управление передаются сообщения, необходимые для установления связи между передатчиком и приемником: ’’готов (не готов) к приему”, ’’ошибка при приеме” и пр.

Рис. 5.9. Кадры телекомплекса ГРАНИТ: а - служебный; б - информационный
Далее следуют два байта защиты от ошибок в соответствии с правилами защиты циклических кодов [порождающий полином Р (х15)] и байт окончания кадра, повторяющий первый байт флаг.
Информационный кадр имеет длину 22 байта и отличается от служебного кадра тем, что после байта управление передаются до 16 байт информации (рис. 5.9, б). Кроме того, в байте управления передаются сообщения, определяющие вид посылок (данные, квитанция, вызов, запрос и т. п.) и функциональные адреса информации (ТС, ТИТ, ТИИ, ТУ и т. п.).
Между передачами информационных кадров (при отсутствии новой информации) в канал связи посылаются чередующиеся единицы и нули (так называемый меандр), которые используются для поддержания синхронной работы тактовых генераторов передатчика и приемника.
Основные функции и аппаратно-функциональные модули
Телекомплекс ГРАНИТ выполнен из ограниченного набора функциональных модулей с унифицированными внутренними связями с общей магистралью (магистрально-модульный принцип).
Устройство ПУ
Центральную часть ПУ образует блок микропроцессов, состоящий из двух одноплатных микроЭВМ ЭЛЕКТРОНИКА МС 1201.02 (800000 операций в секунду) с индивидуальными источниками питания. В состав каждой микроЭВМ входят: модуль процессора, ОЗУ емкостью 64 Кбайт и интерфейсные карты для сопряжения с пультовым терминалом (дисплей ВТА 2000-10) с элементами ввода—вывода, элементами внешней памяти ППЗУ и ОЗУ и с удаленными видеотерминалами (ВТА 2000-15).
МикроЭВМ конструктивно располагаются в общей части компоновочного каркаса ЭВМ, куда входят также субблоки системной магистрали и элементы управления микроЭВМ, перевода их в пультовый режим, элементы сигнализации неисправности и т. п.
К каждой микроЭВМ может быть подключен блок полупроводниковой памяти общей емкостью до 128 К (8 субблоков ППЗУ по 16 К в каждом). Элементы последовательного интерфейса ИРПС обеспечивают управление дисплейными модулями типа ВТА 2000-15 (до 8 шт.) и печатающими устройствами с интерфейсом ИРПС. Удаленность устройства ПУ от дисплейных терминалов — не более 0,5 км (при использовании кабеля связи ТГ-0,5 и скорости обмена до 9600 бит/с). Информация, набранная на экране любого из восьми дисплеев ВТА, вводится нажатием клавиши в буфер элемента сопряжений, откуда она считывается в память одной из микроЭВМ (при отсутствии более приоритетных задач). Вывод информации из микроЭВМ на любой из восьми видеотерминалов осуществляется побайтно. Скорость вывода определяется интерфейсом ИРПС (4,8; 9,6; 19,2 кбит/с) и загруженностью микроЭВМ выполнением текущих, более приоритетных задач.
Набор функциональных элементов в устройстве ПУ определяет объем и характер телемеханических функций, выполняемых телекомплексом.
Устройство ПУ обеспечивает прием и передачу сигналов по каналам связи.
Число линейных субблоков (элементов сопряжения с каналом связи) в устройстве ПУ — до 128 — по одному линейному субблоку на каждое радиальное направление (для резервирования каналов требуется самостоятельный линейный субблок). Линейный элемент обеспечивает прием—передачу информации при скоростях 50, 100, 200, 300, 600 или 1200 бит/с по физическим линиям связи либо при подключении внешнего модема — по уплотненному каналу связи. Режим передачи — дуплексный или полудуплексный, структура подсоединения к линии связи — радиальная, магистральная или транзитная (изменение режима передачи, скорости и структуры канала достигается с помощью перемычек в субблоке).
Обеспечивается гальваническое отделение линейных цепей приема и передачи устройства ПУ (КП), а также фазирование цепей приемника по фронтам сигналов, поступающих из линии связи, формирование и контроль поступления меандров.
Структура линейных элементов ПУ и КП одинакова.
Телесигнализация двухпозиционных сигналов: воспроизведение на диспетчерском пункте — до 1024 ТС;
отображение ТС в составе технологических кадров на экранах дисплеев — до 4096 ТС;
контроль по состоянию датчиков ТС за простоем оборудования — до 100 контролируемых объектов на бланке печатающего устройства.
Телеизмерение текущих значений (ТИТ):
воспроизведение ТИТ указывающими (регистрирующими) приборами, число приборов — не более 64;
воспроизведение ТИТ контрольными цифровыми приборами в коде (без масштабирования); число контрольных приборов — не более двух, число контролируемых параметров — до 256;
отображение ТИТ в составе технологических кадров на экранах дисплеев; число параметров ТИТ — не более 2048; отображаемые параметры масштабируются по формуле А = кх + b, где А — отображаемая величина; х — записанное в памяти кодовое значение ТИТ; к — коэффициент масштаба; b — смещение шкалы. Максимальное число различных значений к= 64, b=20;
сравнение ТИТ с уставками с выдачей результатов сравнений при обнаружении расхождения на бланк печатающего устройства и на элементы сигнализации щита (пульта). Число сравниваемых параметров - до 200. Величины ’’верхней” и ’’нижней” уставок задаются в относительных единицах с шагом, равным 5%, и зоной нечувствительности в окрестностях уставки 2%.
Телеизмерение интегральных значений ТИИ: воспроизведение ТИИ контрольным цифровым индикатором (без масштабирования), число индикаторов — до двух, число контрольных параметров — до 256;
отображение ТИИ в составе технологических кадров на экране дисплея, число отображаемых значений ТИИ — до 1024, параметры ТИИ отображаются в натуральных единицах (в отмасштабированной форме);
периодическая регистрация значений ТИИ на бланке печатающего устройства.
Передача команд телеуправления (ТУ) двух- и многопозиционными объектами, расположенными на КП. Общее число однопозиционных команд на одном КП не превышает 128.
Обмен цифро - буквенной информацией (ЦБИ) с удаленными видеотерминалами по типу ’’экран—экран”. Число видеотерминалов типа ВТА 2000-15 — до восьми, одновременно обслуживается — до двух. Максимальное число знаков на экране 1920.
Аппаратные элементы ввода-вывода.
Устройство ПУ располагает набором аппаратных элементов ввода—вывода, в число которых входят следующие функциональные модули.
Модуль вывода дискретных сигналов двух типов: 1) для ’’полусветлого” и ’’светлого” щитов и 2) для ’’темного” щита. Модули рассчитаны на воспроизведение до 64 ТС по схеме ’’полусветлого” щита и до 32 ТС по схемам ’’светлого” и ’’темного” щитов. Каждая выходная цепь модуля обеспечивает управление приборами сигнализации диспетчерского щита (сигнальными лампами, реле) при нагрузке не более 100 мА, 50 В. Предусмотрены режим мигания при изменении ТС и квитирование несоответствия сигналов и приборов сигнализации, а также режим контроля исправности сигнальных ламп.
Модуль вывода аналоговых сигналов— предназначен для управления до 16 указывающими (регистрирующими) приборами при токе до 5 мА и сопротивлении не более 2,4 кОм. Модуль позволяет проводить тестирование выходных цепей подачей фиксированного выходного тока, равного 2,5 мА, на все выходы модуля.
Модуль вывода цифровых сигналов — предназначен для контроля и цифрового отображения ТИТ и ТИИ в виде немасштабированных значений параметра от 1 до 255 и номера ТИ. Параметры ТИ отображаются на цифровом индикаторе поочередно с частотой изменения от 1 до 0,1 Гц. Число параметров ТИ для одного модуля вывода — до 128.
Модуль ввода команд ТУ — обеспечивает ввод команд ТУ от ключей управления на диспетчерском пульте (щите) или от набора клавиш дисплея с отображением команд на экране.
Устройство КП
Устройство выполнено в виде набора аппаратных функциональных модулей, выполняющих обычные телемеханические функции.
Ввод ТС от датчиков осуществляется модулем ввода дискретных сигналов, который обеспечивает спорадическую передачу ТС при изменении состояния любого датчика из общего числа, равного 1—64. Число устанавливаемых модулей определяется требованиями к объему ТС. Датчики ТС могут быть контактными (один замыкающий или размыкающий контакт) или бесконтактными. Бесконтактный ключ должен в замкнутом состоянии обеспечивать сопротивление не более 200 Ом, в разомкнутом — не менее 1 МОм. Цепи управления бесконтактными датчиками используют внешние источники, гальванически не связанные с внутренним источником питания схемы устройства КП. Датчики ТС в пределах одного модуля ввода могут объединяться в группы и соединяться с ним симметричными парами проводов. Допускается объединение общей шины на стороне датчиков с сопротивлением общего провода не более 10 Ом.
При обнаружении изменения состояния любого датчика ТС в группе модуль ввода переводится в состояние готовности и после получения разрешения от внутриблочной централи формирует прямой и инверсный коды, соответствующие текущему состоянию всех датчиков группы. Разрешение на посылку ТС выдается при отсутствии передачи информации (для случая радиального канала связи) либо при поступлении команды запроса на данный КП для случая магистрального канала.
Спорадическая передача ТС возникает только после повторной проверки несоответствия текущей информации с ранее переданной, которая задерживается на 2 или 50 мс (в зависимости от желания пользователя) . Задержка одинакова для всех ТС в группе.
Модуль ввода ТС обеспечивает также передачу по вызову от ПУ. В этом режиме циркулярно передается ТС по всем группам независимо от обновления информации. Модуль ввода предусматривает режим тестирования ТС, для чего на лицевой панели модуля имеется кнопка, обеспечивающая передачу всех сигналов 1 или 0 независимо от реального состояния датчиков. В этом режиме изменяется и код функционального признака ТС (четыре старших разряда в байте ’’управление” информационного кадра) для блокирования выдачи тестирующих сигналов на выходе ПУ.
Ввод ТИТ от аналоговых датчиков осуществляется модулем ввода аналоговых сигналов. Модуль обеспечивает спорадическую передачу ТИТ от 1—32 датчиков, разбитых на две группы по 16 датчиков в каждой. Вход модуля рассчитан на стандартные параметры аналоговых сигналов постоянного тока 0—5 мА, —5-+5 мА при сопротивлении нагрузки Rн=1 кОм; 0-20, 4-20 мА при Rн=0,5 кОм или постоянного напряжения 0—10 В при Rн=500 кОм.
Модуль ввода имеет »восьмиразрядный АЦП, вход которого через коммутатор подключается к выходам датчиков. На один модуль могут быть подключены 1—32 однотипных датчика, объединенные в две группы по 16. Датчики ТИТ должны соединяться с устройством КП симметричными парами проводов. Удаление датчиков не должно превышать 100 м. Информация ТИТ передается спорадически в пределах группы, если зафиксировано отклонение между текущими и переданными ранее значениями измеряемой величины от любого датчика группы на величину, большую пороговой. Порог, равный 1, 2, 4 квантам (квант — вес младшего разряда), устанавливается одинаково для всех датчиков, подключенных к одному модулю ввода. В одном информационном кадре содержатся восьмиразрядные двоичные коды ТИТ от 16 датчиков группы.
Модуль ввода аналоговых сигналов обеспечивает также передачу ТИТ по вызову с ПУ. Команда вызова — общая для всех модулей ввода. Максимальное число модулей ввода ТИТ 8. Предусмотрен режим тестирования модуля, при котором при нажатии соответствующей кнопки на передней панели модуля обеспечивается передача по всем 16 каналам каждой из двух групп заданного тестового значения параметров независимо от реальных значений сигналов от датчиков. В тестовом режиме автоматически изменяется код функциональной принадлежности информации, чем блокируется обработка на ПУ тестовой информации.
Время передачи информации ТИТ по одной группе (16 параметров) при скорости передачи сигналов в линии связи 300 бит/с — менее 1 с. Модуль ввода ТИТ обеспечивает автоматическую повторную передачу данных при непоступлении квитанции, подтверждающей их неискаженный прием на ПУ, в течение от 5 до 10 с.
Ввод число-импульсных сигналов осуществляется модулем ТИИ, обеспечивающим накопление и периодическую передачу (например, в пятиминутном цикле) кодов от датчиков интегральных телеизмерений, сгруппированных в 1—16 каналов. К каждому каналу можно подключить до четырех число-импульсных датчиков. Модуль суммирует импульсы от всех датчиков одного канала независимо от временных характеристик каждого из них. Частота импульсов от каждого датчика не должна превосходить 10 Гц. В качестве датчиков ТИИ могут использоваться, например, счетчики электроэнергии с встроенными генераторами импульсов, частота которых пропорциональна частоте вращения диска, т. е. потребляемой электроэнергии.
Датчики ТИИ должны соединяться с устройством КП симметричными парами проводов при удалении не более 100 м.
Накопленная в каждом канале информации ТИИ передается восьмиразрядным двоичным кодом. В одном информационном кадре передаются данные ТИИ всех шестнадцати каналов. Передача ведется периодически — через каждые 5 мин — нарастающим итогом. Значение кода в каждом очередном цикле передачи равно коду суммы ранее накопленных импульсов и поступивших за время между соседними циклами передачи. При переполнении накопителей передается новое значение без указания факта переполнения (факт переполнения легко устанавливается по уменьшению значения вновь переданного кода).
Коэффициент предварительного пересчета импульсов от датчиков ТИИ устанавливается на КП индивидуально для каждого канала и может быть равен 1, 16, 162 и 163. Величина введенного масштабного коэффициента должна учитываться при обработке информации в устройстве ПУ. Предельная емкость накопителя при установке максимального коэффициента пересчета для каждого канала равна примерно 106 импульсов, что обеспечивает возможность накопления без переполнения в течение более суток даже при максимальной частоте сигналов от датчиков.
Для защиты от стирания накопленной информации может использоваться внешний источник питания постоянного тока напряжением 9—11 В при потреблении не более 5 мА для одного элемента ввода.
Передача ТИИ может быть инициирована командой вызова с ПУ. В этом режиме с разделением во времени будут переданы данные от всех установленных на КП элементов. Время передачи данных от одного КП при скорости передачи сигналов в линии связи 300 бит/с — не более 1 с.
Вывод команд телеуправления двух- и многопозиционными объектами ТУ обеспечивается модулем приема команд ТУ, осуществляющим контроль достоверности ТУ и двухступенчатый вывод команды на промежуточные реле с разделением подготовительной и исполнительной операций.
Один элемент вывода ТУ предназначен для управления 1—128 двухпозиционными объектами. Модуль обеспечивает контроль получения только одной команды ТУ. Однако с помощью режимной перемычки этот контроль может быть заблокирован и модуль может использоваться для приема многопозиционных (кодовых) команд. Имеется возможность с помощью режимной перемычки регулировать время удержания безошибочно принятой команды ТУ на выходных реле в диапазоне 0,5-60 с.
Сопряжение с исполнительными механизмами ТУ осуществляется блоком промежуточных реле (типа РП21). Один блок содержит реле для коммутации 1-16 (двух групп) исполнительных механизмов. Блок промежуточных реле может размещаться вблизи исполнительных механизмов (с целью экономии контрольного кабеля). Для управления каждым исполнительным механизмом используется цепочка — тройник, образованный замыкающим контактом индивидуального объектного реле и замыкающими контактами реле —повторителей команд ’’включить” или ’’отключить”, и дополнительный замыкающий контакт объектного реле с замыкающим контактом дополнительного реле — повторителя ’’отключить” (в качестве последнего используется маломощное реле РЭС-22).
Модуль сопряжения с исполнительными механизмами размещается в отдельной конструкции и может удаляться от устройства КП на расстояние до 200 м. Цепи исполнительных механизмов подключаются ’’под винт” проводом сечением до 2,5 мм2.
Сопряжение с каналом связи устройства КП осуществляется линейным модулем. Модуль обеспечивает прием—передачу информации на частоте 50, 100, 200, 300, 600 или 1200 бит/с по физическим линиям связи или при подключении внешнего модема по уплотненным каналам связи. Режим передачи - дуплексный или полудуплексный, структура подсоединения к линии связи — радиальная, магистральная или транзитная.
Линейный модуль имеет буферное устройство емкостью в один информационный кадр, обеспечивает гальваническую развязку с каналом связи и инерционную синхронизацию схемы приемного устройства с импульсами, поступающими из канала связи, а также формирование и контроль холостой серии импульсов (меандров).
Вывод аналоговых сигналов (для цифровых регуляторов) осуществляется модулем вывода кодовых команд. К одному модулю можно подключить до 16 регуляторов. Регулирующим воздействием является среднее значение выходного тока модуля.
Конструкция
Аппаратура ПУ располагается в одном основном шкафу и Двух- трех шкафах дополнительных (число дополнительных шкафов зависит от информационной емкости системы). Шкафы ПУ — напольные с двусторонним доступом, с поворотной рамой, габариты 1880 х х 800 х 650.
В основном шкафу устанавливаются блок-каркас ЭВМ (верхний этаж), блок-каркас ППЗУ (второй этаж сверху), блок-каркасы с элементами сопряжения с каналами связи (третий и четвертый этажи) и блок-каркас с элементами ввода-вывода информации (пятый этаж сверху). Функциональные аппаратные элементы (модули) располагаются в компоновочных блок-каркасах, имеющих внутриблочную магистраль. Через элементы сопряжения блочная магистраль подключается к системной магистрали микроЭВМ. В дополнительных шкафах (также шестиэтажных) устанавливаются каркасы с элементами сопряжения с каналами связи ис элементами ввода-вывода.
Устройство КП размещается в навесном кожухе, разделенном на две части, — в одной — аппаратура КП, занимающая один блок-каркас, расположенный на поворотной раме, в другой — сборка зажимов внешних связей. Габариты устройства КП (вместе с клеммниками, закрытыми съемной крышкой) 800 х 800 х 474.
Для связи КП с внешними устройствами проводами ’’под винт” сечением до 2,5 мм2 предусмотрены дополнительные соединительные ящики размерами 840 х 500 х 118.
Промежуточные реле ТУ для управления (1—16) исполнительными механизмами размещены в отдельной навесной конструкции размерами 400 х 400 х 220 с поворотной рамой. В нем же размещаются клеммники связи с исполнительными механизмами. Кроме основных КП телекомплекс может содержать малогабаритные КП—М малой информационной емкости. Размеры кожуха КП—М 520х160 х283.
Устройства КП могут устанавливаться в неотапливаемых помещениях при температуре окружающего воздуха от —30 до +55 °C. Электропитание: сеть переменного тока 220 В частотой 50 ± 1 Гц. Потребление сети — не более 40 В · А.
Срок службы КП 10 лет, наработка на отказ для каждого канала по каждой выполняемой функции — не менее 10 000 ч.
Устройства ПУ выполняются в обыкновенном исполнении и предназначены для установки с регулируемыми климатическими характеристиками. Диапазон рабочих температур окружающей среды — от 10 до 35 °C.
Для питания устройства ПУ используется сеть переменного тока 220 В частотой 50 ± 1 Гц. Потребление от сети — не более 300 В · А (без учета потребления периферийных устройств, сопрягаемых с микроЭВМ, и сигнальных ламп на диспетчерском щите).
Основной элементной базой телекомплекса ГРАНИТ являются К—МОП интегральные микросхемы серии К561.
Состав и информационная емкость базовой модели телекомплекса ГРАНИТ
Число КП — 16 при информационной емкости на каждом КП: ТИИ — до 32, ТС - до 192, ТИТ - до 96, ТУ - до 48, число команд-установок — до 16.
Информационная емкость базового ПУ: ТС — 768 (по схеме ’’полусветлого щита”), ТИТ — 32 (аналоговые величины), ТИИ — 128 цифровых параметров.
ТУ — 128 команд на каждый КП с вводом команд от одного диспетчера.
В базовое устройство ПУ входят 16 элементов сопряжения с каналами связи и элемент сопряжения с интерфейсом ИРПС для управления шестью дисплеями типа ВТА 2000-15.
Базовое программное обеспечение поставляется заводом-изготовителем в виде рабочей версии, включающей общие программы функционирования телекомплекса. Программы заносятся в ППЗУ. Пользователю направляются инструкции для программиста, позволяющие размещать в ППЗУ программы перегенерации рабочей версии при коррекции или при необходимости дополнения программного обеспечения программами пользователя. Одновременно прикладывается вся документация заводов - изготовителей микроЭВМ и периферийного оборудования.
Комплекс УВТК-120 разработан ВНИИКА Нефтегаз и готовится к серийному производству ПО ’’Краснодарский ЗИП” Минприбора СССР. Предназначен для использования в автоматизированных системах управления (АСУ) газовой, нефтяной промышленности, промышленности водного хозяйства, а также в энергетике, коммунальном хозяйстве и др. Комплекс предназначен для замены устройств телемеханики типа ТМ-120.1 и всех его модификаций.
УВТК-120 выполняет следующие функции:
ТИ — телеизмерение текущих значений контролируемых параметров;
ТИИ — телеизмерение интегральных значений параметров;
ТУ — телеуправление объектами с дискретными состояниями;
ТР, ТРКУ — телерегулирование путем задания кодовых установок;
ЦБИ — цифро-буквенная информация в двоичном коде для обмена данными между станциями системы;
РТ — ретрансляция всех видов известительной информации;
РТУ, РТР - ретрансляция команд ТУ, ТР (с верхних уровней на нижние);
РТКУ — ретрансляция (сверху вниз) кодовых уставок регулирования методом передачи приращений значений уставок или их абсолютных значений;
ЛВС — решение задач локальных вычислительных систем при управлении технологическими процессами на КП в автономном режиме.
Состав телекомплекса
Телекомплекс УВТК-120 построен по принципу микроЭВМ, содержит функциональные блоки и конструктивы по ГОСТ 10317—79*.

Рис. 5.10. Структурная схема телекомплекса УВТК-120:
КНУ — контроллер начального управления; КУСО - то же связи с объектом; КВТС - то же вывода ТС;. КВТИ - то же вывода ТИ; КВТУ - то же вывода ТУ; КВТР - то же вывода ТР; КСТИ - то же сбора ТИ; КСТС - то же сбора ТС; КСТИИ - то же сбора ТИИ; РЕТ ИРПС - ретранслятор с последовательным интерфейсом; РЕТ ИРПР - ретранслятор с параллельным интерфейсом; ПОРТА - канальный адаптер; ПЭВМ - персональная ЭВМ; УКП М - УТМ КП малогабаритное; УКП Р - УТМ КП ретранслирующее; КП ТМ 120 - УТМ КП системы ТМ 120
Таблица 5.5. Информационные объемы устройств телекомплекса УВТК-120
Устройства
Параметры | ПУ | КП* | УКП.М | УКП.Р |
ти | 25 000 | 8 | 4 | 2000 |
|
| 2000 |
|
|
тс | 50 000 | 8 | 32 | 2000 |
|
| 2000 |
|
|
ТУ | 10 000 | 8 | 16 | 2000 |
|
| 2000 |
|
|
ТРКУ |
| 8 | 1 | 2000 |
|
| 2000 |
|
|
тии | 10 000 | 8 | 1 | 2000 |
|
| 2000 |
|
|
ЦБИ | Длина массива 24 байт, число массивов не ограничено | |||
* Числа в числителе - шаг наращивания емкости для всех функций.
Состоит из станций типа ПУ, КП, малогабаритного устройства УКП.М и ретранслятора УКП.Р. Станции типа ПУ, КП комплектуются из набора функциональных блоков (рис. 5.10).
Блок КНУ является контроллером начала управления. Он содержит микропроцессор типа 1821ВМ85 (аналог INTEL8085), элементы ПЗУ и ОЗУ и осуществляет начальный запуск и загрузку программного обеспечения функциональных модулей системы. Контроллеры ввода- вывода информации подключаются к общей системной магистрали через контроллер связи с объектом КУСО, управляющим блочными магистралями ввода-вывода. Обработка телеинформации ведется персональной ЭВМ (либо мини-ЭВМ), входы которой подключаются к системной магистрали через контроллеры ретрансляции с интерфейсом ИРПС или ИРПР.
Изменение функциональных возможностей и объемов телеинформации в любых сочетаниях обеспечивается путем установки соответствующего количества функциональных блоков в пределах установленного максимального объема.
Общее число станций типа КП и УКП, подключаемых к станции типа ПУ, не должно превышать 250.
Информационные емкости станций ПУ и КП (максимальные и минимальные значения) приведены в табл. 5.5.
Структура и каналы связи
В качестве каналов связи между ПУ и КП могут использоваться: арендованные каналы Министерства связи и ведомственные каналы, организованные различного рода системами многократного ВЧ и тонального уплотнения по ВЛ, физическим линиям связи с четырехпроводным окончанием, радиолиниям и т. п.
Структура каналов связи может быть радиальной и магистральной. Число радиальных направлений, подключаемых к станции ПУ, не должно превосходить 16. Каждое радиальное направление может иметь магистральную структуру с числом КП в магистрали до 16.
Скорости передачи на различных магистралях (направлениях) могут быть разными из ряда 50, 100, 200, 600, 1200 Бод.
Обмен информацией по каналам связи между станциями комплекса производится по протоколу системы ТМ-120.1 байтами с девятым защитным разрядом.
Станция комплекса типа ПУ выполняется по принципу локальной вычислительной сети с общим количеством абонентов до 60.
Скорость передачи сигналов по общей магистрали 1 Мбит/с на расстоянии до 100 м (ЛВС построена по принципу Ethernet).
Структурная схема телекомплекса приведена на рис. 5.10.
Станция ПУ обеспечивает сопряжение с внешними устройствами по стандартным интерфейсам ИРПС, ИРПР по стыку С2.
Количество контроллеров связи с объектами не должно превышать 250.
Станция ПУ выполняет следующие функции по обработке и воспроизведению информации:
масштабирование параметров ТИ и ТИИ;
сравнение с уставками параметров ТИ и с сигнализацией выхода за установленные пределы;
цифро-буквенное воспроизведение на дисплеях обработанных значений ТИ и ТС;
отображение информации ТИ и рассчитываемых параметров на цветных графических дисплеях, диспетчерском щите и табло.
Станции типа КП и УКП М рассчитаны на подключение следующих датчиков:
для ТИ — датчиков токовых и напряжения с унифицированными сигналами;
для ТИИ — датчиков, имеющих на выходе сигнал в виде импульсов
с частотой следования не более 50 имп/с, расстояние до' датчика — не более 100 м; , '
для ТС — датчиков, имеющих один контактный или бесконтактный выход с сопротивлением в замкнутом состоянии не более 200 Ом и в разомкнутом состоянии не менее 200 кОм. Выходные элементы станции КП обеспечивают коммутацию цепей с индуктивной нагрузкой до 400 В · А при напряжении не более 220 В постоянного тока.
Программные модули, обеспечивающие функционирование устройств, хранятся в ПЗУ и ОЗУ.
Загрузка программного обеспечения контроллеров комплекса осуществляется из ПЗУ, расположенного в модуле начального управления КНУ (ПУСКАТЕЛЬ) системы.
Оперативные данные хранятся в ОЗУ.
Общая характеристика канальных адаптеров
Программируемый канальный адаптер (ПКА) представляет собой автономную периферийную микроЭВМ, которая выполняет сопряжение с каналами передачи данных центральных приемо-передающих станций (ЦППС) в сети передачи оперативных данных. Необходимость применения ПКА при построении ЦППС обусловлена, во-первых, объединением в интегральную сеть телеинформационных систем и комплексов с разными протоколами обмена и, во-вторых, потребностью в большой производительности, которая обеспечивается многопроцессорной структурой.
Требование совместимости ЦППС с различными телеинформационными системами имеет два аспекта — программный и аппаратный. Объединение сетей с различными протоколами достигается путем программной реализации требуемого протокола в канальном адаптере. При внедрении ЦППС на диспетчерском пункте, где имеется система сбора оперативной информации, необходимо обеспечить поэтапный ввод новой системы в эксплуатацию. В этом случае в течение определенного времени (0,5—2 года) обе системы сосуществуют и должны принимать информацию от существующих передатчиков через одни и те же каналы передачи данных, т. е. входы ПКА внедряемой ЦППС должны подключаться к выходам модемов параллельно входам существующих устройств ТМ. Характеристики входных узлов ПКА, определяемые требованием аппаратной совместимости с приемниками существующих устройств телемеханики, рассмотрены ниже.
Известен ряд зарубежных и отечественных ПКА для различных микроЭВМ, в частности SBC 544 (INTEL, США), DIM 2002 (Мусrоn, Норвегия), V 6216 (VIDEOTON, ВНР), СМ-1800.8527 (Минприбор СССР),
ПКА системы АИСТ (Минпромсвязи СССР). Последние три типа основаны на микропроцессоре КР580ВМ80А (аналог INTEL 8080) и близки друг к другу по структуре и основным характеристикам. Они предусматривают реализацию как асинхронных, так и синхронных протоколов обмена информацией при использовании асинхронных модемов и поэтому содержат узлы побитной синхронизации. Они содержат также узлы коммутации резервных каналов, что является характерным требованием для телеинформационных систем, применяемых в энергетике. Режим работы по каналам — дуплексный, полудуплексный или симплексный. Число каналов — четыре, что определяется исходя из соображений конструктивной реализуемости, схемной экономичности, производительности процессора ПКА, гибкости и удобства ПКА в эксплуатации.
Межпроцессорный обмен в ЦППС
По общей структуре ЦППС представляет собой многопроцессорную микроЭВМ с разделением функций между центральным и периферийными процессорами, расположенными в ПКА. Функцией ПКА является реализация обмена информацией по каналу связи: установление связи, синхронизация сообщений, кодирование и декодирование, опрос периферийных станций в многоточечной структуре, переспросы забракованной информации, контроль состояния канала связи, коммутация резервных каналов и т. д. Каждый ПКА может быть запрограммирован для работы по своему протоколу, однако принятая информация предъявляется центральному процессору в едином формате и с единым способом адресации для всех направлений приема информации независимо от протокола.
Центральный процессор сортирует принятую информацию и образует соответствующие массивы, которые затем использует для обработки и выдачи на устройства отображения, а также в мини-ЭВМ ОИК. Центральный процессор производит также подготовку информации для ее передачи по различным направлениям, в том числе для ретрансляции на вышестоящий уровень. Собственно передачу осуществляют ПКА в соответствии с протоколом, причем ряд служебных сообщений передается ПКА самостоятельно; квитанции, переспросы забракованной информации, маркер и т. п. Другие виды служебных сообщений, например запросы различных типов информации, формируются центральным процессором и выдаются ПКА для кодирования и передачи.
Организация обмена информацией между центральным и периферийным процессорами может осуществляться различными способами. Использование специальных регистров с двусторонним доступом не нашло применения при построении ПКА, так как приводит к довольно громоздким аппаратным решениям и, главное, очень сильно сужает возможности межпроцессорного обмена. Наиболее универсальным способом обмена является обмен через общее поле оперативной памяти путем прямого доступа (ПДП).
Процесс обмена может инициироваться путем взаимных прерываний от одного процессора к другому. Однако использование этого метода целесообразно лишь в тех случаях, когда обмен информацией в сети происходит нерегулярно, в виде отдельных сеансов со значительными перерывами. В сети передачи оперативных данных такой режим практически не используется, каналы связи являются некоммутируемыми и ЦППС постоянно осуществляет связь по всем каналам. Центральному процессору предъявляются каждое принятое слово или сравнительно короткие блоки. В этом случае необходимость обмена информацией между процессорами целесообразнее задавать не с помощью прерываний, а путем периодического сканирования содержимого специально выделенных ячеек памяти. Такое решение требует меньших аппаратных затрат и исключает расход времени центрального процессора на многократную обработку прерываний от всех ПКА в ЦППС.
Общее поле памяти, через которое обмениваются центральный и периферийный процессоры, может располагаться как в модулях памяти, присоединенных к общей магистрали (далее эта память будет называться памятью ЦП), так и в индивидуальной памяти ПКА. Эти два способа существенно отличаются аппаратными и программными решениями. Для универсальности в некоторых ПКА аппаратно реализуются обе указанные возможности, однако в ряде случаев имеются ограничения в их использовании. Например, ПКА СМ-1800.8527 может получить ПДП к памяти ЦП только тогда, когда он расположен в базовой ЭВМ СМ-1803, но не в блоке расширения. При наличии взаимного ПДП центрального и периферийного процессоров и при некорректном одновременном использовании обеих этих возможностей может возникнуть ситуация ’’клинча”, когда каждый процессор ожидает освобождения шин другим процессором. Эту ситуацию можно исключить либо чисто программным путем, либо использованием аппаратных особенностей конкретного типа ПКА.
С точки зрения построения программного обеспечения вариант ПДП со стороны ПКА к памяти ЦП, очевидно, более универсален и богат возможностями. Однако у этого варианта имеются также и недостатки. Так, ошибка одного из ПКА (аппаратная или программная) может вызвать не обнаруживаемые искажения информации, относящейся к другим ПКА или к другим функциям, или же трудно диагностируемые искажения в работе системных и прикладных программ. Ряд локальных повреждений ПКА могут именно в результате ложного ПДП к памяти ЦП приводить к неработоспособности всей ЦППС. Таким образом, вариант ПДП со стороны центрального процессора к индивидуальной памяти ПКА обладает большей живучестью и более удобен в отладке и при поиске неисправностей благодаря локализации ошибок.
Структурная схема программируемого канального адаптера
Структурную схему ПКА рассмотрим на примере четырехканального модуля СМ-1800.8527 (рис. 5.11). Другие канальные адаптеры, применяемые в ЦППС, имеют близкую структуру, а их различия определяются в основном конструктивными и схемными Особенностями соответствующих микроЭВМ.
Модуль конструктивно состоит из двух блоков элементов (ТЭЗ). Первый представляет собой периферийную одноплатную микроЭВМ на основе микропроцессора КР580ВМ80А. Для размещения программ использована микросхема ППЗУ К573 РФ5 емкостью 2 Кбайт с ультрафиолетовым стиранием, устанавливаемая в специальный разъем. В качестве ОЗУ применены две микросхемы КМ132РУ8Б с организацией 1 К х 4. По отношению к интерфейсу И41 ПКА может выступать как ЗАДАТЧИК и как ИСПОЛНИТЕЛЬ. В первом случае реализуется ПДП со стороны адаптера к памяти ЦП, во втором — ПДП со стороны ЦП к внутренней магистрали ПКА. Соответствующие логические узлы управляют шинными драйверами, которые связывают внутреннюю магистраль ПКА с шинами управления, данных и адресов интерфейса И41.

Рис. 5.11. Структурная схема программируемого канального адаптера
Кроме того, функцией исполнителя является прием специальных команд, с помощью которых ЦП может селективно управлять процессором выбранного ПКА. Предусмотрено выполнение следующих команд: сброс, остановка, пуск.
В качестве элементов последовательного интерфейса, осуществляющих последовательно-параллельное преобразование, применены микросхемы КР580ВВ51А, которые являются универсальными синхронноасинхронными приемопередатчиками (УСАПП). Их возможности позволяют осуществить программную реализацию практически любого протокола, используемого в настоящее время в промышленной телемеханике. С помощью УСАПП возможна также реализация байт — ориентированных протоколов для передачи блоков информации, например протокола BSC. Бит-ориентированные протоколы, в частности протокол HDLC (Х.25 МККТТ), непосредственно микросхемой КР580ВВ51А не реализуются и требуют программного выполнения ряда процедур, в том числе процедуры бит-стаффинга.
Узел таймера в ПКА выполнен на базе трех микросхем КР580ВИ53, которые обеспечивают независимые тактовые сигналы передачи и приема для четырех каналов, а также сигнал периодического прерывания к процессору ПКА. Прием и передача могут осуществляться при скорости до 2400 Бод в синхронном режиме и до 9600 Бод в асинхронном режиме.
Второй блок элементов, входящий в состав ПКА, содержит для каждого из четырех каналов совершенно одинаковые линейные узлы. Линейный узел содержит входные и выходные усилители, коммутатор резервных каналов приема и передачи, синхронизатор принимаемых данных.
Синхронизатор имеет типовую структуру и содержит детектор фронта, делитель частоты, фазовый дискриминатор и схему управления делителем. На вход делителя подается от таймера опорная частота, которая должна быть в 64 раза больше номинальной скорости передачи. На каждом фронте принимаемого сигнала производится фазовая автоподстройка путем коррекции фазы делителя на 1/64. Таким образом, при приеме меандра данный синхронизатор способен скомпенсировать расхождение тактовых частот примерно до 1,6%, а если в принимаемой информации имеется в среднем один фронт на байт, то допустимое расхождение тактовых частот составляет 0,2%.

Рис. 5.12. Схема резервирования каналов связи
При приеме информации от передающих устройств телемеханики старых типов с низкой стабильностью тактовой частоты функция побитной синхронизации реализуется программным путем. При этом скорость передачи информации должна быть не выше 200 Бод, что определяется производительностью процессора ПКА. Дополнительной функцией синхронизатора, примененного в ПКА, является так называемая фазовая защита. При нормальных условиях приема фронты фиксируются вблизи номинального положения, в то время как значительное отклонение фронта (более чем на + 25% длительности элементарной посылки) свидетельствует о большом искажении сигнала в канале связи либо о неправильной работе синхронизатора. В этом случае процессору ПКА передается специальный сигнал о низкой достоверности принимаемой информации.
Как уже указывалось, ПКА должен обладать аппаратной совместимостью с существующими техническими средствами сбора телеинформации. Это реализуется входными усилителями линейных узлов, которые имеют высокоомный дифференциальный вход, работающий при синфазном сигнале до 10 В. Передатчик обычно не нужно включить одновременно с существующим передающим устройством телемеханики. Поэтому специфические требования к выходным усилителям не предъявляются и они реализованы стандартным образом на микросхемах К170АП2.
Особенностью построения сети передачи оперативных данных в энергетике является требование высокой живучести. Для его выполнения используется резервирование ЦППС и каналов передачи данных. Схема резервирования приведена на рис. 5.12. Для упрощения показано только одно направление передачи информации. При приеме резервирование реализуется путем подачи сигнала от обоих модемов на входы ПКА в обе взаимно резервирующие ЦППС. С выходов усилителей данного канала ПКА сигнал R X D поступает на вход УСАПП и к синхронизатору через селектор, который представляет собой простейшую схему И—ИЛИ.
На передающей стороне резервирование выполняется путем присоединения входов модемов к выходным усилителям через переключающие контакты реле, расположенных в ПКА. Эта схема обеспечивает как независимую работу по двум каналам связи, так и использование обоих каналов одной ЦППС, причем благодаря контактной коммутации даже тогда, когда резервная ЦППС выключена. Реле коммутации канала передачи и селектор канала приема управляются командами процессора ПКА. Физически для этого использованы вспомогательные выходные цепи УСАПП, поскольку в ПКА не используется их стандартная функция — обмен служебными сигналами с модемом согласно рекомендациям стыка С2. Это связано с тем, что сеть передачи оперативных данных, для которой предназначены ПКА, является некоммутируемой сетью с непрерывно работающими каналами.
Особенности программирования ПКА
При разработке программного обеспечения ЦППС с ПКА следует учитывать, с одной стороны, общие требования, связанные с многопроцессорной структурой, и, с другой стороны, специфические характеристики конкретной схемы ПКА.
Внутреннее адресное пространство периферийной микроЭВМ ПКА обычно существенно меньше, чем позволяет микропроцессор. Распространенные в отечественной практике ПКА имеют внутреннее адресное пространство 4 Кбайт: 2 Кбайт — ППЗУ, 1 Кбайт — ОЗУ и 1 Кбайт — зона адресации УСАПП и таймеров. Их присоединение как ячеек памяти, а не как УВВ, выполнено для упрощения программ, в которых с помощью регистровой косвенной адресации одинаковые операции производятся над однотипными элементами. Когда процессор ПКА обращается к адресам свыше внутреннего пространства, выполняется прямой доступ к памяти ЦП, если эта функция предусмотрена. При этом ПДП реализуется аппаратно без каких-либо специальных операций в программе.
При обращении ЦП к внутренней магистрали ПКА имеются различные варианты адресации. В микроЭВМ РПТ, где применяются ПКА V 6216, ЦП имеет доступ к 256 байтам ОЗУ каждого ПКА и каждый ПКА занимает соответствующую зону в общем адресном пространстве. Обращение выполняется всегда с предварительной остановкой процессора ПКА. При применении ПКА СМ-1800.8527 обеспечивается доступ со стороны ЦП ко всем 4 Кбайт внутреннего адресного пространства. Это существенно расширяет возможности межпроцессорного взаимодействия, а также резко упрощает тестирование и поиск неисправностей. Обращение может выполняться как с предварительной остановкой процессора ПКА, так и без нее.
В адресном пространстве ЦП ПКА этого типа не занимают индивидуальных зон. Для обращения со стороны ЦП к внутренней магистрали любого ПКА используется одна зона размером 4 Кбайт, общая для всех ПКА. Адрес этой зоны задается программно. Перед выполнением операций ПДП ЦП должен выдать специальную команду, в которой сообщается, к которому ПКА будет производиться ПДП. Такой способ организации ПДП со стороны ЦП к нескольким ПКА предъявляет специальные требования к программному обеспечению, если ПДП используют две или более программы с различными приоритетами.
В этом случае если более приоритетная программа прерывает выполнение другой программы, то при возврате к продолжению последней должен быть специальными командами восстановлен номер того ПКА, к которому должно выполняться обращение в прерванной программе. Указанные операции могут быть предусмотрены непосредственно в соответствующих прикладных программах, однако целесообразнее включить в состав общего программного обеспечения специальный драйвер управления режимами ПКА, который выполнял бы и эту функцию.
В многопроцессорной системе возникает целый ряд вопросов разрешения конфликтов между процессорами. Основные функции ПДП реализуются соответствующими схемами арбитража на общей магистрали микроЭВМ и на внутренней магистрали ПКА. При наличии взаимного ПДП от ЦП к ПКА и обратно и некорректном одновременном использовании обеих этих возможностей может возникнуть упоминавшаяся выше ситуация ’’клинча”, когда каждый процессор ожидает освобождения шин другим процессором. Эту ситуацию можно исключить чисто программным путем, используя специальные ячейки-указатели используемого в данный момент вида ПДП. Другой способ заключается в том, что ЦП перед обращением к памяти ПКА останавливает периферийный процессор, а завершив обмен, разрешает ему продолжать работу.
Еще одна возможность конфликта возникает в том случае, когда оба процессора выполняют операцию записи в одну и ту же ячейку, в особенности когда производится модификация отдельных бит в байте. При этом может реализоваться такая последовательность событий: сначала оба процессора в какой-то очередности прочитывают информацию из ячейки, затем оба выполняют предусмотренные их программами преобразования этого байта и, наконец, процессоры записывают в ячейку результаты этих преобразований. В этом случае актуальна только последняя запись, а результат, записанный первым, теряется.
Аналогичная ситуация возникает и в однопроцессорных мультизадачных системах, но там конфликт устраняется путем запрета прерывания. Запрет ПДП в многопроцессорных системах выполняется не всегда, так как требует дополнительных аппаратных и программных затрат. Поэтому необходимо принимать программные меры для устранения конфликтов указанного типа. Такой мерой является, например, разделение ячеек, чтобы центральный процессор и процессор КА вели запись только в ’’свои” ячейки, а на чтение ограничения не накладываются. Если необходимо, чтобы некоторый признак управлялся обоими процессорами, то значение этого признака должно определяться суммой по модулю 2 определенных битов из разделенных ячеек. При этом каждый процессор может установить требуемое значение данного признака, прочитывая обе ячейки и осуществляя запись только в выделенную для него ячейку.
Фирма АЕГ ТЕЛЕФУНКЕН (AEG TELEFUNKEN) ФРГ разработала и продолжает развивать программно-аппаратный комплекс широкого назначения GEADAT 80, предназначенный для обработки информации и управления в различных областях промышленности.
GEADAT 80 подразделяются на три подсистемы:
GEADAT 81 GT — система телемеханики;
GEADAT 82DZ — система сбора информации;
GEADAT 85LI — система управления промышленными объектами. Характерными особенностями всех систем GEADAT 80 являются: широкая область применения;
использование стандартных магистральных шин для локальных элементов системы;
модульная структура системы;
использование в качестве центральных управляющих элементов систем мини-ЭВМ AEG 80 и микроЭВМ AEG ALU 80;
широкое применение программируемых периферийных аппаратов, расширяющих функции системы;
развитая система самоконтроля;
адаптация к различным объектам управления и контроля.
Система телемеханики GEADAT 81 GT предназначена для использования в энергетике, на железнодорожном транспорте, предприятиях газо-, нефте- и водоснабжения, в аэропортах, на промышленных предприятиях и т. п. Функции и информационная емкость системы зависят от модификации: GEADAT 81-1 GT — модификация большой емкости с аппаратными и программными модулями; GEADAT 81-4U — то же средней емкости; GEADAT 81-8U — жестко-схемная структура малой емкости.
Интеллектуальность системы определяется программным обеспечением периферийных станций (ПСТ), управляемых микропроцессором AEG ALU 80; ПСТ выполнены в виде свободно программируемых устройств.
Система GEADAT 81 GT состоит из центральных станций, устанавливаемых в пунктах управления, и периферийных станций. Система допускает различные конфигурации: пункт—пункт, многоточечную радиальную и магистральную структуры один — N. Число обслуживаемых КП - до 128.
Информационная емкость системы очень высока. Она может быть охарактеризована следующими данными: в направлении от периферийных станций к центральной станции — 520 192 бит; в направлении от ЦСТ к ПСТ - 130048 команд ТУ, 65 024 команды на изменение уставок.
Методы передачи и кодирования информации
При передаче информации со всех ПСТ по многоточечной радиальной структуре один — N или многоточечной магистральной структуре предусмотрены следующие методы передачи:
циклическая передача полноформатных сообщений от ПСТ по запросам ЦСТ со спорадической передачей приказов ТУ в обратном направлении;
циклическая ускоренная передача изменившихся сообщений от ПСТ по запросам ЦСТ со спорадической передачей приказов ТУ и отдельных запросов.
Кроме того, для структуры пункт—пункт возможен режим спорадической передачи сообщений в обоих направлениях.
Информация передается в виде кодовых телеграмм (кодограмм).
Таблица 5.6. Короткая кодограмма системы GEADAT 81GT
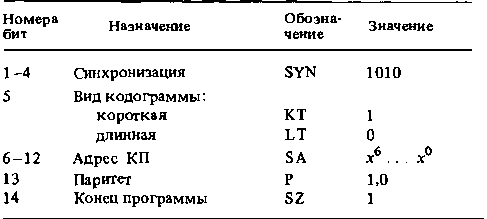
Таблица 5.7. Длинная кодограмма системы GEADAT 81GT
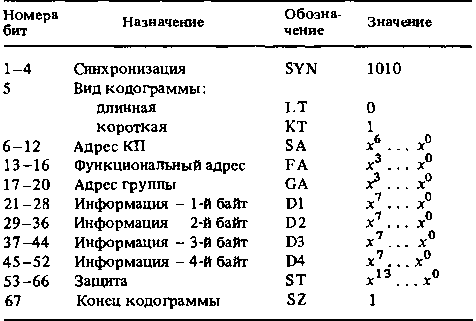
Имеется два формата кодограмм: короткий формат (КТ) и длинный формат (LT). Кодограммы КТ предназначены для запуска, запроса * квитирования информации. Кодограммы LT осуществляют передачу телеинформации в направлении как от ПСТ к ЦСТ, так и от ЦСТ к ПСТ. Все кодограммы начинаются сигналом синхронизации SYN, содержащим 4 бита (табл. 5.6 и 5.7). Следующий бит определяет вид кодограммы: 1 — кодограмма КТ, 0 — кодограмма LT; семь последующих бит задают адрес станции SA. Короткая кодограмма оканчивается битом четности Р и битом окончания кодограммы SZ. В длинной кодограмме после адреса станции SA передаются четыре бита функционального адреса (FA), определяющего вид информации — команды ТУ, сообщения ТС, ТИ, общий запрос и т. п. Далее следует .четыре бита адреса групп (GA). Передаваемая телеинформация занимает в кодограмме LT четыре байта D1—D4. В конце кодограммы передается защитное слово ST, содержащее 14 бит и один бит окончания кодограммы SZ. В обоих видах кодограмм имеются еще бит начала и бит конца передачи. Таким образом, кодограмма КТ содержит 16 бит, а кодограмма LT — 69 бит. При скорости передачи, равной, например, 600 Бод, время передачи короткой кодограммы 27 мс, а длинной — 115 мс.
Способы защиты от помех при передаче
- Короткая кодограмма защищена битом четкости, обеспечивающим кодовое расстояние d = 2.
- Защитное слово ST из 14 бит в длинной кодограмме обеспечивает d=6, что гарантирует весьма высокую помехозащищенность против случайных одиночных помех.
- Защита от пачек помех и устойчивых групповых помех достигается фиксацией бит начала и конца передачи и контролем интервала времени передачи кодограммы.
- Команды ТУ дополнительно защищаются от действия помех следующим образом: в первых двух информационных байтах (DI, D2) используется код 4 х СЦ, в двух последующих байтах (D3, D4) этот код инвертируется. На КП производится анализ принятой кодограммы и в случае отсутствия ошибок дается разрешение на исполнение команды ТУ.
Режимы опроса КП.
Передача информации с КП производится по опросу, посылаемому с ПУ, с обязательным подтверждением (квитированием) принятой длинной кодограммы посылкой короткой кодограммы передатчику. Различаются режим циклической передачи сообщений и режим ускоренного опроса.
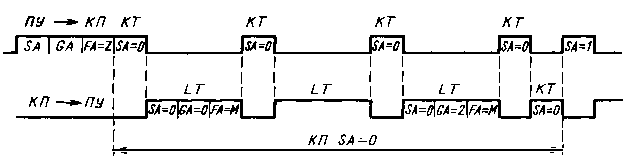
Рис. 5.13. Циклическая передача сообщений в системе GEADAT 81GT: КТ - короткая кодограмма; LT- длинная кодограмма

Рис. 5.14. Циклический ускоренный опрос в системе GEADAT 81GT
Циклическая передача сообщений начинается посылкой со стороны ПУ кодограммы опроса (рис. 5.13). Все КП, получая эту кодограмму, запоминают ее и подготавливаются к передаче информации в циклическом режиме. После каждой группы информационных сообщений КП получает квитанцию от ПУ в виде короткой кодограммы (КТ) с адресом КП (SA). Затем передается информация по следующей группе и т. д. После передачи последней группы с данной КП посылается дополнительная короткая кодограмма, содержащая адрес КП (SA = 0 на рис. 5.13) .
Циклический ускоренный опрос сводится к обмену короткими кодограммами КТ, содержащими адрес опрашиваемого КП SA и соответствующий ответ SA этого КП. В случае наличия новой информации (по сравнению с ранее переданной) на опрашиваемом КП в ответ на запрос SAi передается длинная кодограмма LTi (на рис. 5.14 SA. = 2). Команда ТУ прерывает цикл опроса, и после получения квитанции соответствующего КП цикл опроса продолжается.
Передача информации по схеме пункт—пункт.
КП посылает информационные кодограммы спорадически или циклически с соблюдением команд заданного приоритета; ПУ квитирует каждую полученную кодограмму по обратному каналу. Сообщения более высокого приоритета посылаются вне очереди. Всего имеется восемь приоритетных уровней. Кодограммы, принятые с ошибкой, не квитируются и КП продолжает передавать информацию до получения квитирующей кодограммы. По прошествии определенного числа передач система восстанавливает цикл дальнейших передач. Приказы ТУ посылаются спонтанно между кодограммами с КП. Возможна посылка общих команд на все или на группу объектов ТУ.
Программное управление
Программное управление в устройстве КП осуществляется микропроцессорной платой AEG ALU 80, которая совместно с платами памяти выполняет функции управляющей микроЭВМ. Параллельный интерфейс с периферийными модулями осуществляется через 16-битную магистраль ввода—вывода (PEA-BUS), которая является стандартной для всех программно-управляющих устройств семейства AEG 80. В качестве устройств памяти используются микросхемы ОЗУ (RAM) и ППЗУ (EPROM), число которых определяется числом плат памяти, подключаемых к общей шине памяти S-BUS. Для микропроцессора AID 80 разработана программа реального времени RBS 80, занимающая в главной памяти до 64 Кбайт.
Центральная станция управляется встроенной мини-ЭВМ AEG 80—20, обеспечивающей расширенные возможности обработки телеинформации.
Центральный процессор управляет 16-битной магистралью PEA-BUS. Главная память AEG 80—20 составляет 256 Кбайт и набирается мо- дульно по 32 Кбайт. К магистрали PEA-BUS подключены периферийные модули ввода—вывода, обеспечивающие выполнение разнообразных функций ЦС.
В состав системы AEG 81GT входит широкий набор аппаратных модулей, обеспечивающих выполнение разнообразных телемеханических функций, сопряжение с различными датчиками и выходными устройствами отображения телеинформации и объектами телеуправления.
Основные аппаратные модули AEG 81GT
Модули кодирования и декодирования кодограмм управляются непосредственно от магистрали PEA-BUS. Модуль кодирования преобразует 16-битные параллельные сигналы на входе в последовательную кодограмму заданного вида и формата. Модуль декодирования преобразует принятую кодограмму в 16-битные слова, контролирует правильность приема кодограммы и передает ее для дальнейшей обработки на шины PEA-BUS приемника.
Модули приема—передачи сигналов включают различные модемы со скоростью передачи 50, 100, 200, 600, 1200 , 2400, 4800 и 960 Бод. Модемы присоединяются к модулям кодирования—декодирования по стандартному интерфейсу U24/U28. Модули приема—передачи обеспечивают также автоматическое переключение на исправный канал связи и подсоединение к государственной телефонной сети.
Модули ввода ТС, в том числе с фиксацией времени переключения с точностью 10 мс (для части сигналов с точностью 2 мс), с фиксацией кратковременно действующих сигналов и т. п. Предусмотрены различные скорости группирования входных цепей ТС с потенциально свободными контактами, с электрическим разделением цепей датчиков через оптроны и т. д. Модули входных реле ТС и электронные модули ввода объединяются в группы по 256 и через специальные программно-управляемые платы ввода передают информацию на шины PEA-BUS. Расстояние входных модулей по PEA-BUS не должно превосходить 300 м.
Модули вывода ТС обеспечивают сопряжение с диспетчерским щитом и управление сигнальными лампами. Для уменьшения числа связей со щитом применяются диодные матрицы. Предусмотрены релейные и электронные платы управления сигнальными лампами щита, причем последние содержат отдельный микропроцессор ALU 81.
Модули ввода ТИ. Аналоговые датчики ТИ (датчики тока или сопротивления) опрашиваются асинхронно (по отношению к тактам передачи кодограмм), значения параметров заносятся в промежуточную память, которая циклически опрашивается и в соответствии с заданным алгоритмом (нарушение заданных границ, скорость изменения и т. п.) формирует кодограмму передачи ТИ. Модули ввода ТИ включают платы АЦП, усилителей и коммутаторов для коммутации датчиков, платы разделения потенциалов, платы управления, подсоединяющие АЦП к шинам PEA-BUS.
Модули вывода ТИ включают различные ЦАП с широким диапазоном входных и выходных параметров. Платы ЦАП включают выходные усилители и управляются непосредственно от магистрали PEA-BUS.
Модули ввода—вывода ТУ. Методы передачи команд ТУ обеспечивают высокую надежность операции телеуправления. На ЦП для ввода ТУ используются специальные модули ввода команд, входящие в состав периферийных модулей ЭВМ AEG 80—20, управляемых непосредственно магистралью РКА-BUS. Модули вывода на ПС содержат реле предварительного управления и выходные реле, которые подают команду на исполнение после сравнения их состояния с состоянием реле предварительного выбора.
Кроме перечисленных модулей в состав системы GEADAT 81 GT входят многочисленные модули сервисного обслуживания, модули питания, измерительные приборы и т. д.
Программное обеспечение систем GEADAT 81GT
Для многоканальной телемеханической системы GEADAT 81 GT разработаны программные модули, которые обеспечивают удобство эксплуатации этой системы.
Программное обеспечение GEADAT 81 GT дает возможность оптимального приспособления к различным задачам и пригодно в широкой области применений.
В системе программ GEADAT 81GT имеются программные модули, которые в зависимости от поставленной задачи выполняют следующие основные функции: прием и обработку цифровых сообщений; прием и обработку численных величин; прием и обработку показаний счетчиков; прием, обработку и контроль аналоговых величин, выдачу команд; выдачу оптических и акустических предупредительных сигналов; выдачу измерительных величин на регистрирующие и показывающие приборы; выдачу протоколов повреждений", изменение данных в диалоговом режиме; самоконтроль системы.
При разработке системы обращено особое внимание на то, чтобы все части программ, за исключением списков данных, могли запоминаться в ППЗУ (EPROM). Данные заносятся в память ОЗУ (RAM). Тем самым достигается высокая надежность в работе.
Все программные модули работают под управлением операционной системы RBS 80 — операционной системы реального времени для центрального процессора ALU 80 с главной памятью до 64Кбайт.Она работает по принципу first in — first out (первый пришедший первым обрабатывается). Наряду с обработкой прерываний, обслуживанием заданий, обслуживанием времени и ведением календаря к операционной системе реального времени RBS для устройств GEADAT 81 GT принадлежит так называемая программа инициализации.
Программа инициализации работает один раз после каждого нового запуска (после включения напряжения питания), при этом делается проверка, какие платы и на каких местах включены. При последующих рабочих циклах ведется опрос на передачу информации только для вставленных плат.
К операционной системе реального времени RBS 80 принадлежит также программа обнаружения системных ошибок. Когда возникают такие ошибки, обслуживающему персоналу сообщается об этом выдачей на пишущее устройство протокола событий.
Минимальный объем программ, поставляемых фирмой, обеспечивает выполнение обычных телемеханических функций: передачу и прием ТИ, ТС, ТУ и т. п. Требуемый объем этих функций обеспечивается установкой необходимого количества запрограммированных плат. Если пользователь желает дальнейшего развития интеллектуальности ПО, например введения предварительной обработки информации (контроль границ ТИ, регистрация событий и повреждения и т. п.), он может заказать дополнительные запрограммированные платы, обеспечивающие эти функции. Никакого дополнительного программирования в этом случае от пользователя не требуется. Однако дальнейшее развитие интеллектуальности требует дополнительных плат памяти RAM и EPROM и их соответствующего программирования. Для этой цели фирмой разработан простой язык DODAT, не требующий специальных знаний программирования и легко осваиваемый пользователем.
Операционная система реального времени RBS 80 разработана для микропроцессора ALU 80.
Для устройства ЦС микропроцессор ALU 80 в качестве устройства обработки может оказаться недостаточным. Тогда устанавливается процессор AEG 80—20. В качестве операционной системы для процессора AEG 80—20 используется другая система реального времени (MARTOS К).
Объем обработки телеинформации в пункте управления определяется соответствующими программными модулями мини-ЭВМ AEG 80-20.
Технические характеристики системы GEADAT 81GT

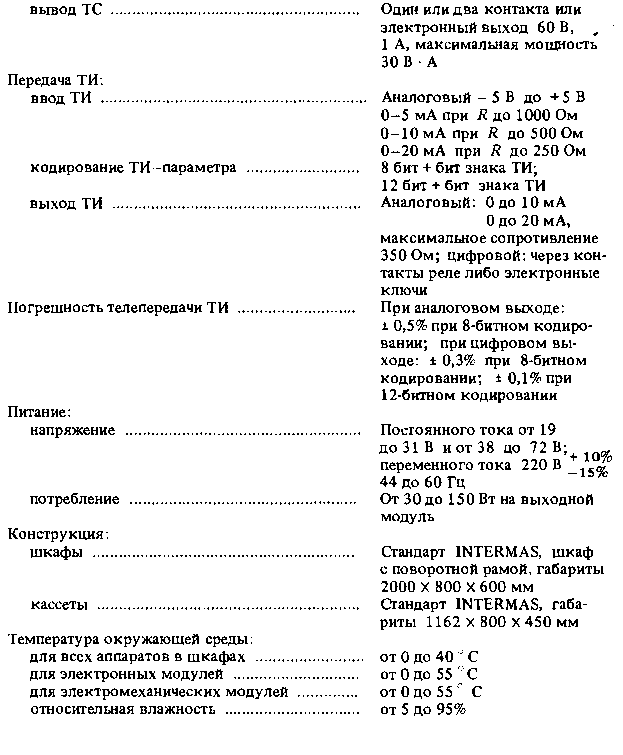
Системы телемеханики типа TRACEC (Франция) являются микропроцессорными системами телеконтроля и телеуправления широкого назначения (энергетика, транспорт, водо-, газо-, нефтеснабжение и т.п.). В зависимости от объема выполняемых функций различаются два типа систем: большой емкости TRACEC 130 и уменьшенной емкости TRA
CEC 92.
Система TRACEC 130
Наряду с традиционными телемеханическими функциями ТУ, ТС, ТИТ, ТИИ (ТЕЛЕСЧЕТ) система обеспечивает ’’интеллектуальную” обработку данных:
передачу таблиц цифровых величин,
контроль аварийных пределов параметров, фильтрацию передаваемых параметров ТИ, контроль и передачу событий с меткой времени, представление данных на КП местному персоналу (дисплей, печать). Специальное исполнение устройств КП (с возможным добавлением микропроцессоров и памяти) предусматривает логическую обработку сигналов и передачу с КП обобщенных сигналов, суммирование параметров ТИ, сбор и ретрансляцию данных с малых подчиненных КП, обмен данными с соседними КП и т. п.
Методы передачи и кодирования информации.
Один ПУ (центральная станция) обслуживает множество КП (периферийных станций).
Таблица 5.8. Кодирование сообщений от КП к ПУ
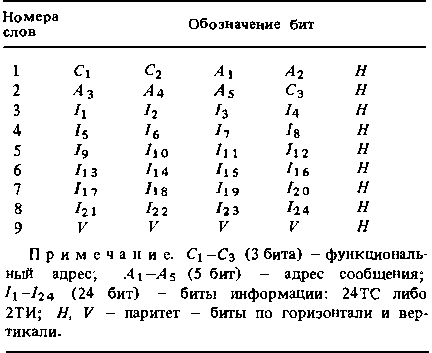
Таблица 5.9. Кодирование сообщений от ПУ к КП; d = 10

При этом возможны следующие виды организации обмена данными: поочередная передача информации с КП по запросу ПУ (все передатчики КП коммутируются на общий приемный ПУ по многоточечной радиальной ’’один—TV” либо магистральной структуре);
непрерывная (циклическая) передача информации с КП; каждый КП передает информацию непрерывно, независимо друг от друга (многоточечная радиальная структура ’’один—один”). ПУ принимает информацию индивидуальными для каждого КП приемниками путем их высокоскоростного опроса с помощью демультиплексора (по такой схеме могут обслуживаться не более 80 КП) либо с помощью канальных
адаптеров (интерфейсных плат 1ST-130), выполняющих роль предпроцессоров обработки данных, принимаемых с каналов связи.
Передача контрольной информации может производиться: циклически, без приоритетов; с приоритетом ТС при изменении состояния; при изменении ТИ более чем на заданную величину по сравнению с предыдущим значением (плавающая апертура); при нарушении аварийных пределов ТИ; при передаче цифровых таблиц по требованию; после перерыва работы системы с общей передачей всех контролируемых данных.
Скорость передачи по каналам связи составляет 50, 100, 200, 600, 1200 Бод.
Структура сообщений: длина блока сообщений (кодограмма) - 45 бит; синхронизирующий сигнал — 45 бит фиксированной структуры.
Каждое сообщение содержит 9 слов по 5 бит в слове.
Для защиты от ошибок применен матричный контроль сообщений по ’’горизонтали и вертикали” (табл. 5.8). Каждый пятый бит является битом защиты по четности (защита по горизонтали — Н), девятое слово содержит четыре бита защиты по четности по вертикали — V и пятый бит Н — защита по четности девятого слова.
В направлении от КП к ПУ биты сообщения распределяются в соответствии с табл. 5.8.
В направлении от ПУ к КП для передачи приказов ТУ и телеустановок применяется специальный матричный код (45, 16) с двукратным кодированием. Код содержит четыре декады BCD (табл. 5.9).
Каждая кодограмма содержит одно синхрослово (табл. 5.10), адрес КП, вид и адрес сообщения и само сообщение.
Таблица 5.10. Синхрослово 45 бит

Надежность передачи. Для передачи команд ТУ и телеустановок обеспечивается расстояние Хэмминга d = 10. Обнаруживаются пакеты ошибок длиной до 22 бит. Для ТИ, ТС, ТСЧ и передачи таблиц ЦБИ расстояние Хэмминга d =4, обнаруживаются пакеты ошибок длиной до 7 бит. Фиксированный синхронный синхросигнал (длиной 45 бит) обеспечивает надежную синхронизацию сообщений, контролируя всевозможные сдвиги фаз между ПУ и КП.
Основные аппаратные модули (блоки).
Центральный микропроцессорный блок управления (ЦБУ) осуществляет функции программного управления работой схемы устройств ПУ к КП. Содержит микропроцессорный набор SBC 80/20, включая микропроцессор INTEL 8080, память на 4 Кбайт ОЗУ (RAM), 8 Кбайт ППЗУ (PROM), универсальный синхронно-асинхронный приемо-передающий элемент (USART). Возможно добавление элементов RAM и PROM, а также подсоединение дополнительного микропроцессора. В блок ЦБУ также входят: шинный контроллер, передающий управляющие воздействия от микропроцессора на общую магистраль ввода—вывода; стабилизированный источник питания; модем; часть логических элементов ввода—вывода (рис. 5.15).
Блок логических элементов ввода—вывода. Блок рассчитан на компоновку до 192 логических субблоков ввода—вывода, имеет собственные шины, которые через элемент логического интерфейса подсоединяются к общей магистрали ввода—вывода. Кроме того, еще 112 логических субблоков ввода—вывода устанавливаются в модуле ЦБУ устройства КП. Каждый субблок позволяет подключить до 8 логических цепей ввода—вывода.

Рис. 5.15. Основные аппаратные модули устройства КП TRACEC
Логические входы имеют следующие параметры:
напряжение — 24, 48, 60 или 110 В постоянного тока ± 20%; ток — 5 мА на вход в состояние ”1”;
разделение цепей — оптронами; уровень изоляции — 2 кВ, 50 Гц;
фильтрация — время нарастания большее или равное 5 мс.
Логические выходы обеспечивают разделение цепей путем установки на выходных субблоках контактных реле с максимальными напряжением и током соответственно 130 В и 5 А постоянного тока, разрывная мощность контакта — 100 Вт, уровень изоляции — 2 кВ, 50 Гц.
Блок аналоговых элементов ввода. Блок содержит 40, или 72, или 128 аналоговых входов (соответственно 5, 9 или 16 субблоков). Каждый субблок имеет один общий АЦП. Субблоки аналогового ввода объединены блочной шиной, которая через элемент входного аналогового интерфейса подсоединена к общей магистрали ввода—вывода.
Параметры аналогового входа :
входной ток — 2,5 + +2,5, или -5,0 + + 5,0, или —10,0 + + 10,0 мА; входное сопротивление — 2000, 1000 или 500 Ом соответственно; входное напряжение —2,5 + + 2,5, или 5,0 + + 5,0, или —10 ++ 10,0 В; число бит квантования — 12;
погрешность линейности преобразования ± 0,1% номинального значения;
сканирование входного сигнала (две возможные скорости сканирования) — посредством безъякорных реле (число срабатываний более 10, уровень изоляции 500 В) либо посредством ртутных реле (число срабатываний более 1010, уровень изоляции 2000 В).
Блок аналоговых элементов вывода
Субблок аналогового вывода содержит два выходных элемента, а всего их в блоке — до 32. Через один элемент аналогового интерфейса все субблоки аналогового вывода подсоединяются к общей магистрали ввода—вывода.
Параметры аналогового выхода:
выходной ток — 2,5 ++2,5, или —5,0+ + 5,0, или—10,0+ +10,0 мА;
максимальное сопротивление нагрузки 2400, 1200 или 500 Ом соответственно;
выходное напряжение —5,0 + +5,0 или —10,0 + +10,0 В с минимальным сопротивлением нагрузки 2000 Ом;
погрешность цифро-аналогового преобразования ± 0,5%;
уровень изоляции — 500 В, 50 Гц;
индивидуальный ЦАП на выход.
Конструктивные данные: стандартный шкаф системы TRACEC 130 размерами 2000 х 1000 х 65 с передней и задней дверцами. Шкаф вмещает до шести блоков (блок-каркасов) ввода—вывода и микропроцессорный блок ЦБУ. В дополнительном шкафу может размещаться до девяти блоков ввода—вывода.
Микропроцессорное устройство телемеханики TRACEC 92-Р. Для КП с относительно небольшими объемами ТУ, ТИ и ТС разработано специальное устройство телемеханики TRACEC 92-Р, которое может работать в комплексе с ПУ TRACEC 130 и TRACEC 92. Методы обмена телеинформацией между ПУ и КП и методы кодирования сообщений при этом полностью сохраняются.
Емкость TRACEC 92-Р ограничена числом субблоков ввода—вывода в блок-каркасах, размещаемых в настенном шкафу размерами 800 х 600 х 300. Максимальное число субблоков ввода—вывода ТУ, ТИ и ТС, включая субблок АЦП, составляет 18 по 16 однопозиционных ТУ, 16 однопозиционных ТС и 16 ТИ в каждом субблоке ввода- вывода. В пределах этого количества субблоков набирается функциональная емкость TRACEC 92-Р, например при 20 ТИ возможно иметь 112 ТУ (однопозиционных) и 144 ТС, либо 128 ТУ и 128 ТС и т. д.
Другим ограничением является объем памяти и возможности адресации модуля ЦБУ, включающего микропроцессор INTEL 8085 (длина слова 8 бит) и элементы памяти (256 байт RAM, 4 Кбайт PROM).
ЦБУ через шинный формирователь управляет магистралью ввода- вывода, на которую подключены все субблоки ввода—вывода, включая один общий АЦП.
Устройство TRACEC 92-Р обеспечивает высокую защищенность от выполнения ложной операции ТУ за счет применения специального помехозащищенного кода с кодовым расстоянием d = 10 и многочисленных проверок исправности выходных цепей ТУ.
Входы ТС опрашиваются с частотой 50 1/с. Состояние входов запоминается в ЦБУ, передача ТС происходит только в том случае, если изменение состояния обнаруживается подряд не менее чем в двух опросах.
Система URSATRANS 5120 (разработана и выпускается комбинатом VEB ELEKTRO—APPARATE—WERKE, Берлин, ГДР) является микропроцессорной системой телемеханики для объектов малой и средней емкости.
Предназначена для ТУ, ТС, ТИ и телесчета (ТСЧ). Центральная станция системы (ПУ) обслуживает одну или несколько периферийных станций (КП).
Центральная станция содержит устройство для связи с диспетчерским щитом, имеет выход на алфавитно-цифровой дисплей, печать и сериесный интерфейс с ЭВМ.
Принцип построения и функционирования системы.
Базой для построения системы URSATRANS 5120 является микропроцессор РОБОТРОН К 1520, являющийся центральной программоуправляющей частью системы. Узлы ввода, вывода и передачи информации выполнены на элементах системы УРСАДАТ 5000.
Модульное построение схемы устройств и программ обеспечивает оптимальное проектирование и исполнение системы для конкретных условий эксплуатации.
Таблица 5.11. Кодограммы системы URCATRANS 5120
Вид кодограммы | Число байт (последовательно) | Назначение байт |
Коротко- форматный | 1 | Начало кодограммы (флаг) |
1 | Адрес станции (ПУ или ТКП) | |
1 | Адрес функциональный | |
2 | Защита по циклическому коду | |
1 | Конец кодограммы | |
Длинно- форматный | 1 | Начало кодограммы (флаг) |
1 | Адрес станции (ПУ или КП) | |
1 | Адрес функциональный | |
1 | Число информационных байт L | |
L | Информационные байты | |
2 | Защита по циклическому коду | |
1 | Конец кодограммы |
Модуль микропроцессора центральной станции через блок промежуточного интерфейса z1 может сопрягаться с другими микропроцессорными модулями для расширения функциональных возможностей. Скорость передачи по интерфейсу z1 достигает 500 кБод.
Центральная станция работает с одной периферийной станцией (структура пункт—пункт) либо с несколькими станциями (структура многоточечная радиальная, многоточечная магистральная). Центральная станция осуществляет циклический опрос периферийных станций по жестко установленной программе опроса.
Принципы передачи и кодирования сообщений.
Передача данных между ПУ и КП базируется на применении стандартного ’’интеллектуального интерфейса F1”, реализуемого микропроцессором канального адаптера U 880 и программируемой схемой последовательного интерфейса U 856. Структура кодограммы определяется стандартным протоколом передачи данных типа HDLC.
Кодограммы подразделяются на коротко- и длинноформатные. Все кодограммы опроса являются короткоформатными. Кодограммы передачи информации — длинноформатные. Состав кодограмм поясняется табл. 5.11.
Байт функционального адреса состоит из двух частей: первая часть (3 бита) идентифицирует вид передаваемого сообщения (ТИ, ТС, ТСЧ), вторая часть (5 бит) определяет адрес сообщения параметра ТИ группы ТС либо ТСЧ.
Адреса параметров ТИ и группы ТС позволяют применять адаптивный метод передачи, т. е. организовать приоритетную передачу сообщений в зависимости от текущей ситуации.
Группа ТС содержит два байта, т. е. 16 ТС. Сообщения ТИ могут быть 8-битные либо 12-битные; 8-битные ТИ занимают два байта: байт функционального адреса, содержащий 32 адреса параметров ТИ, и информационный байт ТИ (однополярный — 8 разрядов либо двухполярный — 7 разрядов и 1 бит — знак ”±”), 12-битные ТИ занимают 3 байта.
Сообщение, ТСЧ занимают 8 разрядов (однобайтные сообщения) либо 16 разрядов (двухбайтное сообщение).
Защита от ошибок передачи достигается применением циклического кода в соответствии с рекомендациями CCITT V.41 и реализуется элементом U 350 F1. Вероятность ошибочного приема сообщений составляет 10-7 при вероятности ошибки на бит 10-4. Кодовое расстояние равно 4.
Защита при ТУ дополнительно обеспечивается подтверждением правильности приема кода адреса станции, кода группы и кода команды.
Технические данные системы
Информационная емкость:
а) для большой модели:
число КП .................................................. 60
на одно КП:
ТС .................................................................. 384 бит
ТИ ............................................................. 32 параметра
ТУ .............................................................. 256 команд
ТСЧ ........................................................... 8 величин
ЦБИ .......................................................... 75 байт
вывод на диспетчерский щит сигналов:
ТС .............................................................. 1200 бит
аналоговые ТИ ........................................ 150 величин
б) для малой модели:
на одно КП:
ТС .............................................................. 16 бит
ТИ ............................................................. 8 параметров
ТУ .............................................................. 16
Скорость передачи:
200, 600, 1200 бит/с - при использовании встроенных модемов
50,100, 200 бит/с - при использовании внешних модемов типа VWT72
Ввод и вывод информации:
ТС: ввод через оптроны 24 В, 60 В постоянного тока ±10%; через реле 24 В, 60 В постоянного тока ± 10%;
вывод через реле 60 В, 1 А
ТУ: ввод два свободных контакта 24 В, 100 мА либо 60 В, 60 мА; вывод - контакт реле 250 В, 1 А, 50 В-А
ТИ: ввод- -5-+5 мА; -10 ++10 мА;
-20++20 мА; 4+20 мА;
-1+ +1В; -10++10В вывод - 0 + 10 В, R > 2,4 кОм;
-10 + +10В, R > 2,4 кОм;
0-5 мА, R < 1,6 кОм;
-5 + + 5 мА, R ≤ 1,6 кОм; 0-20 мА, R < 0,5 кОм
ТСЧ: ввод - через оптроны 24 В, 60 В постоянного тока, ± 10%; максимальная частота импульсов 20 Гц, минимальная длительность импульса 25 мс.
Конструкция: аппаратура ПУ и КП располагается в напольных шкафах с поворотными рамами. Размер шкафа ПУ 800 X 1600 X 600 мм. Размер шкафа КП 800 X 800 X 600 мкл. Для малой модели КП используется настенный шкаф 520 X 320 X 320 (без поворотной рамы).
Глава шестая
СИСТЕМЫ ТЕЛЕМЕХАНИКИ ДЛЯ РАСПРЕДЕЛИТЕЛЬНЫХ ЭЛЕКТРИЧЕСКИХ СЕТЕЙ
ОСОБЕННОСТИ СТРУКТУР СИСТЕМ ТЕЛЕМЕХАНИКИ ДЛЯ РАСПРЕДЕЛИТЕЛЬНЫХ СЕТЕЙ
Распределительные электрические сети — это высоковольтные линии (6 кВ и выше), связывающие понизительные питающие подстанции 220—35/6 (10) кВ непосредственно с потребителями электроэнергии. В зависимости от удаленности потребителей от питающей подстанции, от потребляемой мощности, категории надежности электроснабжения и т. п. распределительные сети могут иметь различные напряжение, конфигурацию и организацию эксплуатационного обслуживания. Оперативное управление распределительными сетями осуществляется с диспетчерских пунктов предприятий электросетей (ДП ПЭС) или районов электросетей (ДП РЭС), входящих в то или иное ПЭС. Как правило, распределительные сети 110—220 кВ и соответствующие питающие подстанции находятся в оперативном подчинении диспетчера ПЭС, а сети 35 кВ и 6 (10) и соответствующие понизительные подстанции управляются с ДП РЭС.
Объектами телеконтроля и управления на питающих подстанциях являются: положение высоковольтной коммутационной аппаратуры подстанций и отходящих от нее линий электроснабжения (ТС, ТУ), уровни напряжений на шинах подстанций, токи нагрузок по линиям, перетоки мощности по линиям, потребление энергии потребителями и т. п. (ТИ). Объекты ТУ, ТС и ТИ на подстанциях сосредоточены в пределах подстанции и обычно обслуживаются одним телемеханическим устройством КП. Устройство ПУ располагается по ДП ПЭС и (или) ДП РЭС.
В распределительных сетях 6 (10) кВ объекты телеконтроля рассредоточены по значительной территории, на которой находятся пункты секционирования (СП), распределительные переключательные пункты (РП, ЦРП), закрытые трансформаторные подстанции (ЗТП) 10/0,4 кВ, пункты двустороннего питания, оборудованные автоматами АВР (пункты АВР), и т. п. Все перечисленные пункты распределительной сети должны быть телемеханизированы для телеконтроля состояния выключательной мощности (ТС) и телеуправления этими выключателями с ДП РЭС. При отсутствии устройств телемеханики эффективность работы автоматики в пунктах секционирования сети и пунктах АВР значительно снижается из-за отсутствия информации у диспетчера об аварийных отключениях и невозможности изменения конфигурации сети для восстановления надежного энергоснабжения.
Важной информацией для снижения потерь в сетях являются также телеизмерение уровня напряжений в узловых точках сети, телеуправление положением анцапф трансформаторов и возможность подключения или отключения специальных компенсирующих конденсаторных батарей для уменьшения перетоков реактивной мощности.
Особая область телемеханизации управления распределительными сетями — это организация циркулярного телеуправления (ЦТУ), т. е. телеуправления целыми группами потребителей с целью снижения энергопотребления в часы пик (выравнивание графика нагрузки путем отключения на это время некоторых потребителей, например термоаккумулирующей нагрузки - бойлерных водоподогревателей и т. п.), переключения многотарифных счетчиков, управления уличным освещением и т. п. Системы ЦТУ особенно развиты в странах Западной Европы (ФРГ, Австрии, Франции, Швейцарии, Венгрии, Чехословакии) . Наиболее известные фирмы по производству систем циркулярного телеуправления ВВС, ZELWEGER USTER, LANDIS & GIR (Швейцария) поставляют аппаратуру во многие страны мира, благодаря чему большой процент объектов бытовой нагрузки распределительных сетей оснащены устройствами ЦТУ. В Советском Союзе циркулярное телеуправление в распределительных сетях еще не получило должного развития, главным образом из-за отсутствия многотарифной системы оплаты электроэнергии и отсутствия соответствующей техники.
Важной областью применения ЦТУ может явиться также автоматическая частотная разгрузка (АЧР), т. е. отключение части потребителей соответствующей категории при аварийной снижении частоты в энергосистеме.
Объектами ЦТУ являются выключатели (коммутаторы) нагрузки, рассредоточенные по сети 0,4 (0,22) кВ. Основным, а в большинстве случаев и единственным каналом связи для таких систем является канал тональной частоты, наложенной на промышленную частоту распределительной сети. Эти каналы наиболее экономичны и надежны в эксплуатации, в силу чего они получили наибольшее распространение в системах ЦТУ.
Каналы ЦТУ, как правило, имеют направление от центра управления (ПУ) к многочисленным КП, расположенным у потребителей. Число таких управляемых КП от одного ПУ может достигать нескольких тысяч. Устройство ПУ располагается на подстанции, находящейся, как правило, на территории ДП РЭС или ПЭС. В зависимости от числа и удаленности КП, а также от параметров и конфигурации сети электроснабжения выбирается мощность сигналов тональной частоты, вводимой в сеть для передачи команд ЦТУ. Для повышения помехоустойчивости передачи команд ЦТУ тональные частоты рекомендуется выбирать в диапазонах между гармониками промышленной частоты, т. е. применять для приема—передачи сигналов узкополосные фильтры с шириной пропускания не более 15—20 Гц и центральными частотами 183, 217, 275 Гц и т. д. при мощности сигналов, составляющей 0,1% номинальной мощности трансформаторов сети. Передатчик ЦТУ на ПУ осуществляет модуляцию сигналов тональной частоты по амплитуде, формируя кодовые посылки с адресами КП и командами ЦТУ. Для повышения помехоустойчивости сигналов длительность импульсных посылок выбирается, как правило, не менее 0,4—0,5 с.
В Советском Союзе, как отмечалось выше, по ряду причин системы ЦТУ не получили распространения. Большее внимание научно-исследовательских организаций (ЭНИН имени Кржижановского, Сельэнергопроект, ВНИИЭ и некоторые другие) привлекли разработки систем телеконтроля и телеуправления для объектов распределительных сетей 6 (10) кВ, в частности сельскохозяйственного назначения. Объекты этих сетей, разбросанные по значительной территории часто с плохим состоянием дорог, без систем телемеханики, требуют значительных расходов и времени на отыскание повреждений и ликвидацию аварийных состояний оборудования. Структура систем телемеханики для распределительных сетей определяется организацией диспетчерского управления в тех или иных районах, конфигурацией и размерами распределительных сетей, мощностью питающих подстанций и т. п.
Системы телемеханики (ТМ-35) для управления понизительными питающими подстанциями 35 кВ (и выше) имеют радиальную (’’один- один”), либо многоточечную радиальную (’’один—ТУ”), либо многоточечную магистральную структуру. В качестве каналов связи используются ВЧ каналы по ВЛ 35, 110, 220 кВ, дуплексные или полудуплексные, а также каналы любых других видов передачи телемеханической информации [34]. Система телемеханики ТМ-35 с многоточечной структурой строится по принципу временного разделения каналов для отдельных КП, имеющих выделенные кодовые адреса. Как правило, все КП подстанций опрашиваются последовательно во времени и при наличии на них новой информации передают ее на ПУ с обозначением своего адреса. Примерные типовые информационные емкости систем ТМ-35 для подстанций (в расчете на один КП): ТУ — до 20 двухпозиционных команд, ТС — до 40 двухпозиционных сигналов и ТИ — до 40 8-разрядных параметров. Число КП на один ПУ — до 16.
Системы телемеханики для распределительных сетей 10 (6) кВ - ТМ-10 характеризуются большим числом КП, рассредоточенных по территории распределительной сети с малой информационной емкостью (1—2 команды ТУ, 2—3 сигнала ТС, 1—2 параметра ТИ). Число таких КП в зоне одной питающей ПС 35/10 кВ может достигать нескольких десятков, а общее число таких зон (РС-10), контролируемых с одного ДП РЭС, — 6—8. В качестве каналов связи для телемеханизации распределительных сетей 10 кВ используются двусторонние каналы тональной частоты по ВЛ 10 кВ либо радиоканалы УКВ. При этом устройство ПУ может располагаться на ПС 35/10 кВ и обслуживать объекты КП в зоне данной ПС либо располагаться на ДП РЭС и обслуживать КП PC-10 нескольких ПС, контролируемых и управляемых с данного ДП РЭС. Одним из основных требований к телеканалам для распределительных сетей является экономия частот, используемых для передачи телеинформации, в данной зоне. Желательно, чтобы для двусторонней передачи информации в зоне одной ПС использовалась одна частота для всех КП (как для тонального канала, так и для радиоканала). Это же требование может распространиться и на все PC-10, обслуживаемые одним ДП РЭС. Поэтому система ТМ для распределительных сетей строится по принципу временного разделения одночастотного двустороннего канала связи для всех КП сети и для передачи команд ТУ и сообщений ТК с объектов этой сети. Поскольку в силу экономии частот приходится для различных зон PC-10 использовать одну и ту же частоту каналов, для исключения влияния передач информации между РС-10, относящихся к разным зонам, необходимо дополнительное кодовое разделение сообщений для различных зон РС-10, т. е. необходим двухступенчатый выбор объемов КП: выбор адреса зоны (код зоны) и выбор адреса КП (код КП) в данной зоне.
На рис. 6.1 приведены несколько возможных структур построения систем телемеханики для питающих подстанций 35/10 (ТМ-35) и распределительных сетей 10 (6) кВ (ТМ-10). На рис. 6.1, а представлена двухуровневая структура, состоящая из системы телемеханики ТМ-35 для телемеханизации питающих подстанций 35 кВ с устройством ПУ-35 на ДП РЭС и систем ТМ-10 с устройствами ПУ (ОП-10) на самих подстанциях 35 кВ. Информация из РС-10 собирается устройствами КП-10 и по каналам К-10 передается на ОП-10, откуда она ретранслируется через КП-35 диспетчеру ДП РЭС. В обратном направлении ретранслируются команды РТУ. При наличии дежурного персонала на ПС 35 команды ТУ непосредственно могут передаваться в сеть РС-10 через блок местного воспроизведения и управления БМВУ, располагаемый в устройстве ОП-10. По описанной схеме в качестве ТМ-10 могут использоваться устройства телекомплекса ТРС-1, а в качестве ТМ-35 — любые устройства общепромышленного назначения (ТМ-120 М, МКТ-3, ГРАНИТ, АИСТ—PC), в качестве каналов связи К-35 — ВЧ каналы по ВЛ 35 кВ, в качестве К-10 — каналы тонального уплотнения по ВЛ 10 кВ аппаратуры АТКС-10.
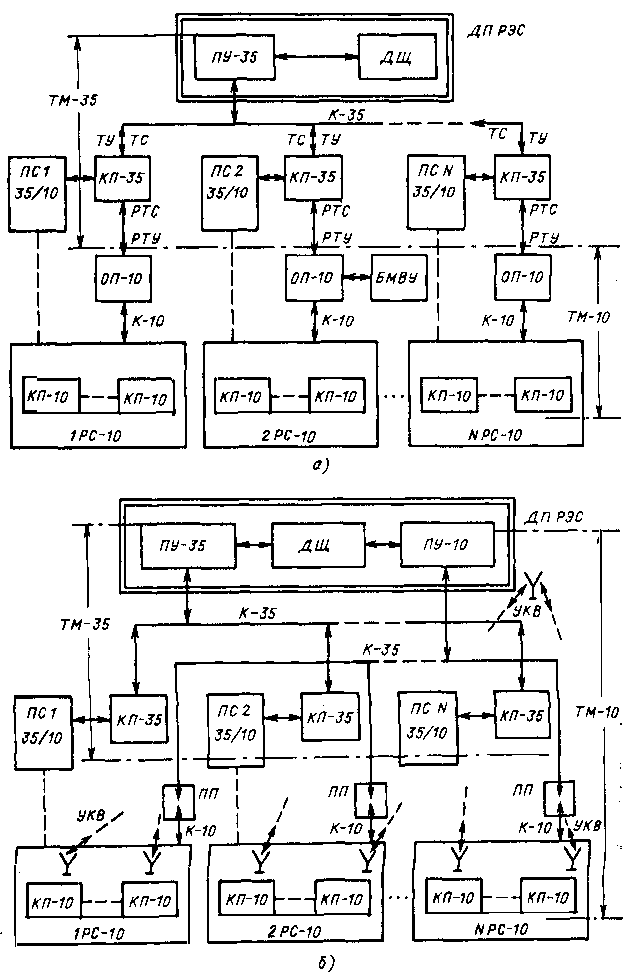
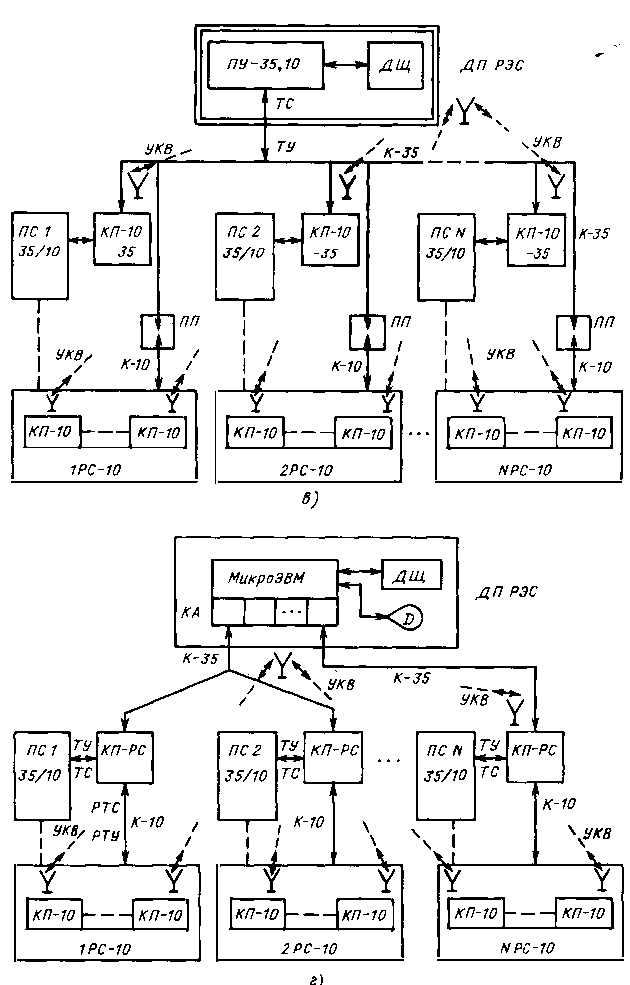
Рис. 6.1. Структуры систем телемеханики для распределительных сетей:
а - двухуровневая структура ТМ с ретрансляцией сигналов (РТС) и команд (РТУ); б - раздельные системы ТМ-35 и ТМ-10; в - совмещенная система ТМ-35. 10; г - двухуровневая система ТМ с совмещенными КП-35 и ОП-10 на базе микропроцессорных устройств КП-РС; ТМ-35 - система телемеханики для управления ПС 35 кВ; ПУ-35, КП-35 - УТМ системы ТМ-35; ТМ-10 - система телемеханики для распределительных сетей 10 кВ (6 кВ); ПУ-10 (ОП-10), КП-10 - УТМ системы ТМ-10; БМВУ - блок местного воспроизведения и управления УТМ ОП-10; КП—PC - микропроцессорные УТМ, выполняющие функции КП-35 и ОП-10; К-35, К-10 - каналы связи для ТМ-35 и ТМ-10 соответственно; ПП - пункты переприема канал-канал (К-35, К-10); 1РС-10, . . ., NPC-10 - зоны распределительных сетей 10 кВ соответствующих питающих подстанций ПС 1 35/10................... ПС № 35/10; ДЩ - щит - пульт управления ДП РЭС; Д - дисплей диспетчера; КА - канальные адаптеры микроЭВМ
На рис. 6.1, б представлена структура с раздельными системами телемеханики ТМ-35 и ТМ-10. Системы работают независимо друг от друга, по раздельным каналам связи. Устройства ПУ обеих систем располагаются на ДП РЭС и работают на общий ДЩ (как показано на рис. 6.1, б) либо на раздельные щиты с мнемосхемами 35 и 10 кВ. В качестве ТМ-35 и К-35 может использоваться та же аппаратура телемеханики и каналов связи, что и в двухуровневой структуре на рис. 6.1, а. В качестве ТМ-10 предполагается использовать аппаратуру телемеханики типа ТРС-1М с расширенной емкостью (по числу обслуживаемых КП) и с введением функций ТИ. В качестве канала связи для ТМ-10 необходим канал с переприемом: от КП-10 до подстанций 35/10 — тональный канал по ВЛ 10, как в случае двухуровневой структуры рис. 6.1, а, далее до ДП РЭС (если ПС не находится на территории ДП РЭС) — переприем ПП по каналу К-35 (ВЧ по ВЛ 35 либо через аппаратуру уплотнения физических телефонных линий связи). Скорость передачи сигналов по К-35 ограничивается скоростью передачи по каналам К-10. При использовании в качестве К-10 тональных каналов по ВЛ 10 кВ эта скорость не превышает 6,25 бит/с.
В качестве канала связи для телекомплекса ТРС-1М целесообразно использовать радиоканалы УКВ радиостанции типа 18Р22С Воронежского завода Минпромсвязи СССР. Телекомплексы, работающие на базе устройств телемеханики типа ТРС по тональным каналам связи по ВЛ 10 кВ, именуются системами ТМРС-10, а по радиоканалам УКВ — системами РТС-80. В системе РТС-80 приемопередатчики радиостанций устанавливаются на каждом КП сетей РС-10 и на ДП РЭС, где установлено УТМ ПУ ТРС-1М. Радиостанции обеспечивают полудуплексную связь между ПУ и каждым КП. Для приема и передачи информации используется одна и та же частота, выделенная для данного РЭС. Алгоритм работы радиоканала задается телекомплексом ТРС.
На рис. 6.1, в проиллюстрирована совмещенная система телемеханики ТМ-35, 10. Система работает по алгоритму телекомплекса ТРС. На ДП РЭС устанавливается ПУ-35, 10, являющийся УТМ ПУ-10 расширенной емкости, на всех КП, в том числе и на подстанциях 35/10, — устройства КП-10 системы ТРС-1М. Устройства КП-10 на объектах распределительной сети 10 кВ подключаются к общему каналу связи К-35 через ПП, связывающие каналы связи К-10 и К-35. Данная структура может быть использована только для маломощных питающих подстанций с малым числом объектов контроля и управления. Возможно также использование радиоканала, как и в структуре на рис. 6.1, б.
Весьма перспективной является двухуровневая структура ТМ с совмещением устройств КП-35 и КП-10 на базе микропроцессорных устройств КП—PC с программным управлением, представленная на рис. 6.1, г. Устройства КП-PC устанавливаются на ПС 35/10 кВ, где они выполняют функции КП-35 (телеконтроль и телеуправление объектами подстанции), а также функции ОП-10 в системе ТРС (опрос КП-10 и ретрансляцию сообщений ТС и ТУ от объектов РС-10 к ДП РЭС и обратно). Совмещение функций достигается соответствующим программным обеспечением микропроцессорных канальных адаптеров КП—PC, причем поскольку скорость передачи сигналов по каналам связи К-10 весьма мала (несколько бит в секунду), загрузка микропроцессора задачами сбора и передачи информации в сети РС-10 невелика и может быть организована в интервалы времени, свободные от решения задач приема-передачи информации от ДП РЭС. Функции ПУ-35 на ДП РЭС может выполнять микроЭВМ, например СМ-1800 с канальным адаптером (см. § 5.5).
Комплекс МКТ-3 разработан СКВ завода ’’Электропульт” и серийно выпускается этим заводом с 1988 г. [32].
Основная область применения — крупные питающие ПС 220, 110/35/10(6) кВ, управляемые с диспетчерских пунктов электросетей, и узловые ПС энергосистем; в распределительных сетях может использоваться в качестве системы ТМ-35.
В телекомплекс МКТ-3 входят одно устройство КП и до трех устройств ПУ (ДП). Информация с КП может одновременно передаваться на три ДП по независимым радиальным каналам связи.
Выполняемые функции:
циклическая передача с КП телеизмерений мгновенных значений (ТИ);
воспроизведение ТИ на ПУ на аналоговых и цифровых приборах;
автоматическая спорадическая передача с КП сообщений ТС, а также передача ТС по вызову с ПУ;
воспроизведение на ПУ двухпозиционных сигналов ТС на мнемосхеме диспетчерского щита (светлый, темный щит);
передача с ПУ и исполнение на КП команд телеуправления (ТУ); ретрансляция (РТ) информации ТИ-ТС с ПУ на КП высшего ранга;
ввод информации ТИ-ТС на ДП в ЭВМ.
Информационная емкость (в зависимости .от модели устройства) ТИ — 5,15,30,45 или 60 8-разрядныхпараметров;
цифровые ТИ — 1,2,3 или 4 16-разрядных сообщения;
ТС — 32, 64,128 или 256 двухпозиционных сигналов;
ТУ — 16, 32 или 64 двухпозиционные команды ВК, ОТ;
РТ — до 30 ТИ и 256 ТС с каждого устройства ПУ и до 60 ТИ и 512 ТС для устройства КП.
Вся информация ТИ—ТС, принимаемая ПУ, может вводиться в ЭВМ. Предусмотрена возможность ввода информации одновременно в две ЭВМ.
Предусмотрен ввод информации от ЭВМ в устройство ПУ. Интерфейс ПУ—ЭВМ предусматривает наличие в ЭВМ транзисторных ключей, работающих на нагрузку 800 Ом при напряжении 10—12 В в устройстве ПУ. Цепи устройства ПУ, связанные с ЭВМ, имеют гальваническую развязку. Информация от ПУ в ЭВМ вводится по магистральным шинам, из которых восемь информационных, семь — адресных и три — для служебных сигналов (разрешение считывания, предложение информации и неисправность телекомплекса). Нагрузочная способность каждого выхода ПУ — 30 мА для работы на две ЭВМ. Уровень логического ”0” на выходе ПУ 0,1—0,2 В, уровень ”1” — 10—12 В.
Основная погрешность телепередачи ТИ составляет: не более 0,6% при цифровом выходе, не более 1,0% при аналоговом выходе.
Каналы связи: дуплексный канал по проводным линиям связи или ВЧ канал по ВЛ. Для передачи информации ТИ—ТС (без ТУ) возможно использование симплексного канала связи. Скорость передачи сигналов: 50, 100, 200, 300, 600 и 1200 Бод для передачи ТИ — ТС и 50, 100, 200 и 300 Бод — для передачи ТУ. Предусмотрена возможность работы по основному и резервному каналам связи с автоматическим переходом на исправный канал.
Быстродействие передачи сообщений
Время телепередачи команды ТУ при скорости передачи сигналов по каналу связи 50 и 200 Бод соответственно равно 3,0 и 0,7 с, продолжительность исполнительского импульса — от 0,9 до 2,7 с (может регулироваться) .
Время спорадической телепередачи ТС: при 50 Бод минимальное 0,56, максимальное 4,1 с; при 200 Бод — соответственно 0,14 и 1,2 с. Максимальное время определяется при наихудших условиях — при изменении объекта ТС в момент начала передачи группы ТИ.
Время телепередачи сообщений ТИ (без ускорения): 30 ТИ при 50 Бод — 11,5 с, при 200 Бод — 2,9 с. При передаче семи ускоренных ТИ (из 30) при 50 Бод - 5,6 с, при 200 Бод - 1,4 с.
Достоверность передачи информации: вероятность ложной команды . ТУ меньше или равна 10-14, вероятность ложного сообщения ТИ или ТС меньше или равна 10-8 (1-я категория по ГОСТ 26205—83).
Структуры кодов и принципы передачи информации
Сообщения ТИ—ТС. Поскольку для передачи информации ТИ применен циклический метод, а для передачи ТС — спорадический, информация ТИ—ТС передается кодовыми предложениями переменной длины. Если объекты ТС не изменяют своего состояния, то кодовое предложение содержит постоянное число кодовых слов, соответствующих числу параметров ТИ в данной группе. Все группы ТИ передаются циклически, по очереди. Каждое предложение начинается маркерной посылкой, состоящей из трех маркерных слов (рис. 6.2, д), затем следуют адресное слово ТИ и 8 информационных слов ТИ. Каждое кодовое слово содержит 14 бит. Адресное и информационное слова содержат по 8 информационных и 6 контрольных бит, образующих корректирующий код с кодовым расстоянием d = 4. Маркерное слово образуется специально выделенной последовательностью: 10100111001001. Передача кодов с КП на ПУ осуществляется беспаузными сигналами.
Возникновение новой информации ТС приводит к включению в кодовое предложение посылок ТС. Посылка ТС состоит из адресного и информационных слов ТС. Посылки ТС передаются после окончания маркерной посылки и посылок ТИ. Подряд может быть передано не более четырех посылок ТС, затем опять передаются посылки ТИ.
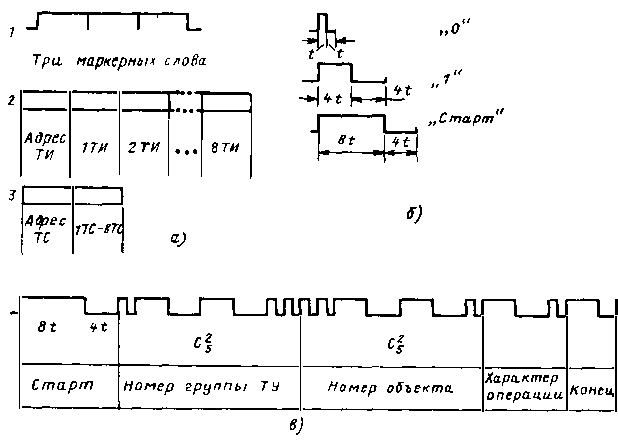
Рис. 6.2. Сигналы телекомплекса МКТ-3:
а - виды посылок: 1 - маркерная, 2 - группы ТИ, 3 - группы ТС; б - элементы ситалов ТУ; в - слово команды ТУ
Адресное слово содержит шестиразрядный код адреса и двухразрядный функциональный признак ТИ или ТС. Информационное слово ТИ передается 8-разрядным двоичным кодом. Информационное слово ТС передает сообщение о состоянии восьми двухпозиционных объектов.
Контрольные символы к в информационных и адресных словах определяются следующими проверочными уравнениями:
а) информационные слова:

б) адресные слова имеют те же (по номеру) и проверочные символы, т. е. к4, k8, к10, k12, к13, к14, с той лишь разницей, что их значения дополняют до четности значения соответствующих информационных бит, а не до нечетности, как в информационных словах, например для адресного слова к4 =a1 + а2 + а3, kg =а5 + а6 + а7 и т. д.
Для периодической проверки исправности узлов приема и передачи сообщений ТС в устройстве предусмотрен так называемый ’’квазицикл”, т. е. принудительная передача группы ТС независимо от наличия изменения состояния объекта в этой группе. В течение ’’квазицикла” от всех групп ТС по очереди передаются сигналы состояния объектов. ’’Квазицикл” ТС повторяется через определенный промежуток времени, который может устанавливаться по желанию эксплуатационного персонала. Для исключения ложной информации или потери сообщений при спорадической передаче ТС предусмотрено положительное квитирование принятых сигналов. При приеме новых сигналов ТС устройство ПУ посылает квитанцию, которую должно принять устройство КП. Если квитанция не принимается в течение определенного времени, то устройство КП вновь передает ту же посылку ТС. Слово квитанции содержит стартовый сигнал, адресный код ТС из шести символов и контрольный символ, дополняющей адресный код ТС до четности.
Для уменьшения времени телепередачи некоторых ТИ в телекомплексе предусмотрен для этих ТИ укороченный цикл передачи. В этом режиме за время общего цикла передачи датчики ’’ускоренных ТИ” опрашиваются несколько раз. Число таких ТИ ограничено и не превышает семи. Общее число ТИ при этом соответственно уменьшается, поскольку общий цикл передачи остается постоянным для данной модификации. Необходимость ’’ускоренных ТИ” может возникнуть для передачи
ТИ в системах автоматического регулирования частоты (САУРЧМ), где время обновления обычно не должно превосходить долей секунды.·
Команды ТУ. Для передачи команд ТУ используются сигналы с пошаговой синхронизацией. Число импульсов и пауз в посылках ТУ постоянно (14 импульсов в слове ТУ). Стартовый импульс имеет длительность 8г, символ 0 передается импульсом и паузой длительностью по t, символ 1 — импульсом и паузой длительностью по 4t (рис. 6.2, б). Посылка ТУ состоит из стартового сигнала (8t + 4t), сигналов выбора характера операции ВК или ОТ (1,0 или 0,1), выбора номера группы и номера объекта управления в группе. (Выбор номера группы и номера объекта в группе осуществляется кодом .) Общее число возможных двухпозиционных команд ТУ равно 100:
![]()
где Сг — число групп ТУ; CO — число двухпозиционных объектов в группе.
Из общего числа используется 64 команды ТУ. Для большей надежности посылка ТУ состоит из двух повторяющихся слов.
Ретрансляция ТИ—ТС. Ретрансляция информации ТИ—ТС (РТ) производится по запросу устройства КП верхнего ранга. Устройство КП верхнего ранга и устройства ПУ нижнего ранга соединяются магистральными информационными шинами, магистральными адресными шинами ТИ и ТС и шинами запроса информации ТИ и ТС. Запрос информации РТ производится при поступлении на адресные магистральные шины от устройства КП адресов ТИ и ТС в двоичном коде, которые расшифровываются дешифраторами ПУ нижнего ранга. После приема общего запроса ТИ или ТС ретранслируемая информация появляется на магистральных информационных шинах и поступает в устройство КП. Информация ТИ ретранслируется в темпе работы КП верхнего ранга. Информация ТС должна ретранслироваться по мере ее обновления, поэтому она периодически с высокой скоростью запрашивается у устройств ПУ нижних рангов и вводится в устройство КП верхнего ранга, где она сравнивается с информацией, полученной в результате предыдущего цикла опроса. Если при этом сравнении обнаруживается новый сигнал, то он передается так же, как ТС от местных датчиков. Для ретрансляции информации от устройств МКТ-3 дополнительных узлов ретрансляции не требуется. При необходимости ретрансляции информации от устройств ПУ МКТ-2 оно должно быть дополнено дешифратором адресного кода и усилителями.
Аппаратная элементная база
Логические узлы схемы устройств МКТ-3 реализованы на интегральных микросхемах К176 малой и средней интеграции. Для гальванической развязки входных, выходных и линейных цепей применены диодные AOD101 и транзисторные оптроны в интегральном исполнении К249КП2. В качестве выходных реле ТС установлены реле с магнитоуправляемыми контактами РЭС64, выходные реле ТУ РП21. Для контроля за работой узлов схемы применены светодиоды АЛ307 и цифровые индикаторы АЛО324.
Автодиагностика и сервис
В устройствах КП и ПУ предусмотрены:
непрерывный опрос исправности субблоков с автоматической цифровой индикацией неисправного субблока;
цифровая индикация кода по каналам ТИ;
световая индикация информации ТИ—ТС по каждому каналу; световая индикация режимов общих узлов устройств;
регистрация числа переданных и принятых команд ТУ и отказов В(, приеме информации ТИ-ТС;
ручной набор информации ТИ и ТС (набор кода) по каждому каналу, в том числе вводимой в ЭВМ.
Конструкция шкафов устройств МКТ-3
Шкафы подразделяются на центральные и периферийные. В центральных шкафах содержатся общие логические узлы схем ТИ-ТС-ТУ, а также некоторое количество выходных узлов. Периферийные шкафы содержат выходные узлы. Типы шкафов зависят от информационной емкости, типа щита и места расположения ключей ТУ (щит или пульт). В состав устройства КП входит один из центральных шкафов и может входить один из периферийных шкафов. В состав устройства ПУ входит один из центральных шкафов и может входить до двух периферийных шкафов.
Все шкафы - напольного типа, обслуживание - одностороннее. Габариты всех шкафов 2000 х 600 х 425, кроме шкафа для ретрансляции 1024 ТС и 120 ТИ, размер которого 2200 х 800 х 425. В шкафах на поворотной раме закреплены блоки (типовые кассеты БУК-б).
Питание и потребление
Питание устройств МКТ-3 производится от сети переменного тока 220 В, 50 Гц. Выполнение всех функций и сохранение работоспособности обеспечивается при изменении напряжения питания на КП и ПУ в пределах +10 +-20% номинального значения и изменении частоты от 46 до 52 Гц.
Мощность, потребляемая устройством КП, - не более 150 В · А, устройством ПУ - не более 250 В · А при максимальном объеме входных и выходных узлов.
Основная область применения — телемеханизация распределительных сетей 10(6) кВ (в дальнейшем 10 кВ) сельскохозяйственного назначения [39]. Система ТМРС-10 состоит из комплекса устройств телемеханики типа ТРС-1 и каналообразующей аппаратуры АКТС-10, обеспечивающей передачу телемеханических сообщений по каналу тональной частоты, наложенной на электрическую сеть 10 кВ. Система обеспечивает телеконтроль и телеуправление объектами сетей электроснабжения потребителей, находящихся в зоне одной питающей (опорной) подстанции 35/10 кВ.
Передача информации от объектов телеконтроля (секционирующие выключатели, выключатели распределительных пунктов, пунктов АВР и пр.) осуществляется на опорную подстанцию (ОП) и далее ретранслируется на ДП РЭС. Телеуправление этими объектами производится с ОП (при наличии на ней дежурного персонала) либо ретрансляцией команд с ДП РЭС. Примерная структурная схема системы ТМРС-10 представлена на рис. 6.4.
Комплекс устройств телемеханики ТРС-1
Телекомплекс ТРС-1 разработан ВНИИЭ и СКВ завода ’’Электропульт”. Серийный выпуск ТРС-1 производится заводом ’’Электропульт” с 1985 г.
Устройства телемеханики ТРС-1 в комплексе с каналообразующей аппаратурой на тональных частотах АТКС-10 либо аппаратурой УКВ радиостанций* обеспечивают передачу и прием сообщений ТС из распределительных сетей 10 кВ сложной конфигурации и передачу команд ТУ к объектам этой сети. Кроме того, устройство ТРС-1 ПУ осуществляет ретрансляцию сигналов ТС (РТС) через устройство телемеханики КП верхнего ранга и ретрансляцию команд ТУ (РТУ) с ДП РЭС (см. рис. 6.1, а). В качестве УТМ верхнего ранга могут использоваться устройства КП-35 типов МКТ-2, МКТ-3, ГРАНИТ, АИСТ КП-PC, ТМ-120 М.
Состав комплекса ТРС-1.
Комплекс ТРС-1 содержит от одного до 15 устройств КП и одно устройство ПУ. Устройства КП выполняются двух моделей — КП-А и КП-Б, различающихся информационной емкостью. Устройство ПУ устанавливается в помещении опорной подстанции, устройства КП — непосредственно около выключателей мощности пунктов секционирования, распределительных пунктов 10 кВ, на энергообъектах нагрузки 0,4 кВ и т. п., как правило, на открытом воздухе либо в трансформаторных будках.
* Телекомплекс, состоящий из УТМ ТРС-1 и УКВ радиостанций типа 18Р22С, именуется РТС-80.
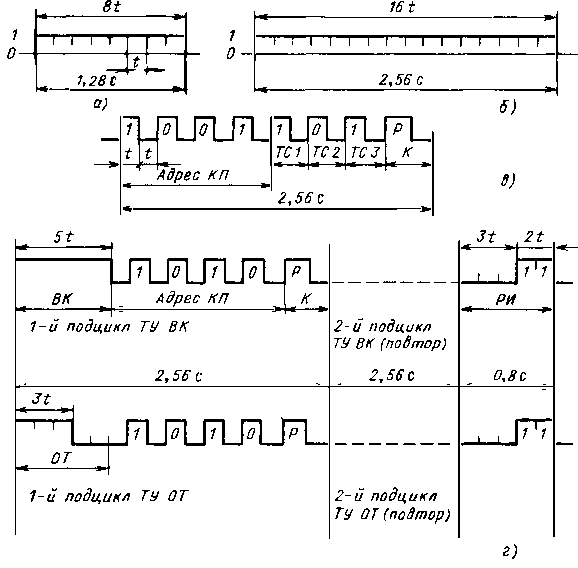
Рис. 6.3. Кодограммы телекомплекса ТРС-1:
а - маркерный сигнал МС с ПУ; б - вызывной сигнал ВС с КП; в - информационный подцикл ТС ("окно" КП 1001); г - команды ТУ ВК и ОТ, объект N10(1010)
Выполняемые функции, информационная емкость ТРС-1.
Аппаратура комплекса выполняет следующие функции:
периодический запрос с ПУ информации на всех КП;
передачу с КП и прием на ПУ сообщений ТС по запросу с ПУ, а также автоматически при переключении объектов ТС на КП;
передачу с ПУ и прием на КП двухпозиционных команд ТУ;
ретрансляцию сообщений ТС (РТС) в кодовой форме по запросу КП верхнего ранга;
ретрансляцию с ПУ на КП команд ТУ (РТУ), получаемых от КП верхнего ранга.
Информационная емкость устройства КП-А — 3 ТС, 1 ТУ; КП-Б — 9 ТС, 3 ТУ.
Общее число устройств КП модели А на одно ПУ — до 15. Общее число сигналов, принимаемых ПУ, — 60, из которых 45 — двухпозиционные ТС и 15 — контрольные сигналы о работоспособности устройств КП (по одному сигналу с каждого КП).
Общее число команд ТУ, передаваемых с ПУ, — до 15; ретранслируемых через ПУ: РТУ — 15, РТС — 60.
Принципы передачи информации.
Телекомплекс ТРС-1 является кодоимпульсной системой телемеханики с временным разделением общего канала связи между КП. Для обеспечения синхронной работы всех устройств КП и ПУ используется синхронная сеть 50 Гц. Синфазирование устройств КП и ПУ осуществляется стартовым (маркерным) сигналом (МС), посылаемым с ПУ на все устройства КП. Сигнал МС существенно отличается по длительности от всех остальных рабочих сигналов в канале связи. Его продолжительность составляет 8t, где t = 0,16 с — длительность информационного импульса (рис. 6.3). При приеме МС запускаются переключатели РИ (распределители импульсов) на всех КП, которые синхронно переключаются с распределителем импульсов в устройстве ПУ благодаря наличию на всех пунктах системы синхронной тактовой частоты. Синхронная тактовая частота образуется путем деления промышленной частоты 50 Гц на 16 с помощью электронных делителей частоты. Таким образом, синхронная тактовая частота переключения распределителей F = 50/16 = 3,125 Гц, длительность одного периода 320 мс.
Передача информации ТС. Каждому КП отводится свое информационное окно — по 8 периодов тактовой частоты (2,56 с). Номера периодов тактовой частоты, отведенных данному КП, строго фиксированы (распайкой соответствующих перемычек в аппарате КП). Цикл опроса всех 15 КП составляет 128 тактов (8 тактов МС и 15 х 8 информационных тактов), т. е. 40,96 с.
При переключении РИ данного КП в позицию, соответствующую его информационному окну, начинается передача информации с этого КП. За 8 периодов (8 импульсов по 160 мс, разделенных восемью паузами такой же длительности) передаются адрес КП (4 периода), состояние объектов ТС и сигнал исправности КП (3 периода), а также контрольный сигнал Р защиты по нечетности (1 период). Информационным импульсным признаком на каждом периоде является наличие или отсутствие импульса длительностью t = 160 мс. Адрес КП кодируется четырехразрядным двоичным кодом (рис. 6.3, в). Паузы между импульсами используются в качестве разделительных интервалов. Наличие разделительных пауз между информационными импульсами контролируется. Их число в ’’окне” всегда постоянно (8). В аппарате ОП при переключении РИ на соответствующих тактах также формируются адреса КП, которые побитно сравниваются с адресами КП, принимаемыми из канала связи. При несоответствии адресов КП (принимаемого из канала связи и сформированного в аппарате ОП), при нарушении нечетности числа принятых в ’’окне” единиц или числа разделительных пауз информация бракуется и опрос повторяется. При фиксации подряд пяти ошибок по одному и тому же КП выдается сигнал ’’неисправность” соответствующего КП, после чего осуществляется однократный запрос через 20 мин с последующей отменой неисправности по данному КП.
Стартовый сигнал МС посылается с ОП для запроса информации с КП в следующих случаях: а) автоматически для контроля каналов связи и аппаратуры комплекса периодически с интервалами, задаваемыми таймером в устройстве ОП (обычно 1 раз в 3 ч); б) вручную, по желанию диспетчера; в) в случае изменения информации на любом КП при получении вызывного сигнала ВС из канала связи; г) по запросу от УТМ верхнего ранга; д) при фиксации ошибок при приеме информации от КП.
Если в период между циклическими опросами возникает сигнал ВС, аппарат ПУ немедленно по получении этого сигнала вырабатывает стартовый сигнал МС и начинается внеочередной опрос всех КП.
При фиксации приема сигнала МС на КП запрещается передача вызывного сигнала ВС. Во время передачи с КП сигнала ВС осуществляется запрет на прием сигнала МС. При приеме сигнала МС все КП приводятся в исходное состояние, и по окончании МС начинается синхронная передача всех КП на ПУ, начиная с младшего адреса КП. В случае самопроизвольного отключения объекта ТС на КП посылка вызываемого сигнала ВС происходит с задержкой на 40 с, необходимой для срабатывания двухступенчатого АПВ. Если АПВ окажется успешным, изменение состояния объекта ТС аппаратом КП не фиксируется и сигнал ВС не посылается. Внеочередной опрос всех КП происходит также после передачи команды ТУ для какого-либо КП.
Ретрансляция сигналов ТС (РТС). Информация ТС, собираемая со всех КП устройством ПУ, может ретранслироваться на ДП РЭС (или ДП ПЭС). Передача РТС предусмотрена в кодовой форме по запросу от КП верхнего ранга как с общих узлов, так и от контактов индивидуальных реле ТС в устройстве ПУ ТРС-1. При ретрансляции в кодовой форме обмен сигналами между КП верхнего ранга и ТРС-1 ПУ производится по магистральным шинам. При наличии сигнала запроса на РТС от КП верхнего ранга устройство ПУ выдает импульс разрешения ретрансляции. Адрес запрашиваемого КП ТРС поступает по четырем адресным шинам в двоичном коде. Запрашиваемая информация ТС выводится на четыре информационные шины вместе с сигналом (импульсом) разрешения РТС. К моменту окончания импульса РТС на информационных шинах присутствует информация ТС по запрашиваемому адресу КП. При изменении состояния объектов ТС устройство ПУ посылает устройству КП верхнего ранга сигнал новой информации, который снимается сигналом запроса ретранслирующего устройства и вызывает передачу РТС.
Передача команд ТУ. Команда ТУ состоит из двух одинаковых подциклов (для большей надежности) и сигнала разрешения исполнения РИ (рис. 6.3, г). В каждом подцикле передается характер операции (включить ВК и отключить ОТ) и адрес КП. Сигналы ВК и ОТ являют» ся также функциональными признаками и стартовыми сигналами (маркерами) операции ТУ, а код адреса КП одновременно является й кодом номера объекта ТУ (поскольку на каждом КП имеется один объект ТУ). Каждый подцикл ТУ содержит по 8 периодов тактовой частоты (тактов) или по 16 полутактов длительностью Г =0,16 с. Сигнал ОТ равен 3ί (0,48 с), сигнал ВК — 5t (0,8 с). Адрес КП передается четырехразрядным двоичным кодом с защитой по четности. Сигнал разрешения исполнения РИ (интервал длительностью 3ί, импульс Длительностью 2t) посылается после окончания двух подциклов ТУ. При приеме команды ТУ на КП адрес КП, полученный из канала связи, сравнивается с адресом данного КП. При совпадении адресов, фиксации защиты по четности и определенного числа разделительных пауз в 1-м подцикле дается разрешение на прием 2-го подцикла. При совпадении 1-го и 2-го подциклов дается разрешение на фиксацию сигнала РИ. После приема сигнала РИ на заданном месте импульсной серии выдается команда на управление. Время исполнительного импульса ТУ — оτ 2 до 2,5 с.
Сигнал общего опроса КП ВС после исполнения команды ТУ формируется сразу без выдержки 40 с, которая необходима при автоматическом переключении объектов ТС. В случае отсутствия ВС (если команда ТУ не выполнилась) устройство ПУ через интервал времени 7,68 с (три подцикла) посылает сигнал общего опроса МС.
Команды ТУ могут посылаться с ОП от блока БМВУ в устройстве ПУ ТРС-1 (ключи управления выведены на переднюю панель блока БМВУ) либо с пульта диспетчера РЭС через вышестоящее УТМ методом ретрансляции команд (РТУ). Для ввода команд ТУ в устройство ПУ РТС-1 предусмотрены 7 магистральных шин: 5 шин адреса КП (4 информационные и одна для защиты по четности), 6-я шина — для выбора характера операции (ВК — сигнал 1, ОТ — сигнал 0) и 7-я шина — сигнал пуска. По сигналу пуска набранная команда ТУ передается во входные узлы ПУ и осуществляется кодирование команды ТУ. Для РТУ от вышестоящего КП предусмотрены дополнительно две магистральные шины, по которым устройства обмениваются сигналами запроса и разрешения РТУ. Передача и ретрансляция команд ТУ возможны только во время интервалов между опросами КП (предпочтение ТС перед ТУ). Поэтому устройство ПУ в ответ на запрос РТУ выдает сигнал занятости ПУ приемом информации ТС.
Элементная база, условия эксплуатации и надежности аппаратуры телекомплекса ТРС-1.
Логические узлы схемы устройств ТРС-1 выполнены на интегральных микросхемах К561 средней интеграции. Линейные цепи, узлы ретрансляции имеют гальваническую развязку на диодных оптронах А0Д101. Входные и выходные реле ТС — электромагнитные реле РЭС49 и РЭС60, выходные реле ТУ — РП21.
Питание устройств ПУ и КП должно производиться от синхронной сети переменного тока напряжением 220 В, 50 Гц при допустимых изменениях напряжения питания на КП + 10 + -20%, на ПУ +10 + -15% номинального значения и изменении частоты питающей сети от 47,5 до 52,5 Гц.
Мощность, потребляемая устройством КП (модель А), — не более 25 В · А, устройством ПУ (при максимальной емкости) — не более 150В-А.
Устройства КП предназначены для эксплуатации на открытом воздухе при непосредственном воздействии солнечной радиации, дождя, пыли, влажности, допустимая температура — от —40 до +45 °C, влажность — до 100% при 25 °C. Устройство ПУ должно устанавливаться в закрытом помещении при отсутствии прямого попадания влаги, солнечной радиации, пыли и пр.; допустимая температура — от 1 до 40 °C, влажность — до 80% при 25 °C.
Завод-изготовитель гарантирует среднюю продолжительность работы до отказа одного КП не менее 10000 ч. Устройства КП размещены в герметизированных шкафах навесного типа с габаритами 560 х 560 х х 350 мм, массой 37 кг, устройства ПУ — в пылезащитном шкафу напольного типа с габаритами 2000 х 600 х 425 мм, массой 146 кг.
Среднее время восстановления работоспособности комплекса ТРС-1 — не более 2 ч. Для обеспечения этого времени в устройстве ПУ предусмотрен резервный блок ТМ устройства КП, что обеспечивает при выходе из строя одного из УТМ КП быструю замену его резервным блоком и восстановление работоспособности всего комплекса.
Для контроля исправности работы комплекса ТРС-1 и удобства его обслуживания и наладки на передние панели блоков устройства ПУ вынесены светодиоды для: индикации кода, принимаемого и выдаваемого в устройства канала связи; индикации сообщений ТС по каждому адресу КП; индикации состояния КП (исправлен, не исправлен) по каждому адресу.
В устройстве КП имеется встроенный индикатор для проверки работоспособности узлов ТС и ТУ.
Аппаратура тонального канала связи АТКС-10*
* Разработана ЭНИН имени Кржижановского при участии института ”Сельэнергопроект” и ВНИИЭ.
Аппаратура АТКС-10 предназначена для образования двустороннего канала связи по ВЛ 10 кВ на тональной частоте для передачи контрольной информации (ТС) от КП, расположенных в различных пунктах распределительной сети 10 кВ, и передачи команд ТУ в обратном направлении — от ПУ к КП. В качестве несущей тональной частоты в обоих направлениях используется частота 1003 Гц. Разделение направлений сигналов тональной частоты в каналах — временное. Алгоритм работы аппаратуры АТКС-10 задается телекомплексом ТРС-1. В состав АТКС-10 входит следующая аппаратура:
пункт управления (ПУ) : приемо-передающая аппаратура тонального канала связи АТКС-10 ПУ; устройство присоединения передатчика на опорной подстанции (ОП) — УП ОП; устройство присоединения приемника на ОП -УП ТВС;
контролируемые пункты (КП): приемо-передающая 'аппаратура тонального канала связи при конденсаторном присоединении АТКС-10 КП—К; то же при трансформаторном присоединении АТКС-10 КП—Т; устройство присоединения конденсаторное УП КП—К; трансформатор связи ТСВ; фильтр несущей частоты ФН.
Схема организации канала на тональной частоте и назначение аппаратуры канала связи приведены на рис. 6.4.
Ввод сигналов тональной частоты со стороны ОП (ПУ) и со стороны КП в распределительную сеть 10 кВ осуществляется по схеме ’’фаза- фаза”. Эта схема обеспечивает работоспособность системы ТМРС-10 при однофазных КЗ на землю, что является обязательным требованием к каналам передачи информации по ВЛ 10 кВ. Со стороны ОП тональные сигналы вводятся по параллельной схеме на шины ПС 10 кВ (на рис. 6.4 фазы А и С) через конденсаторное устройство присоединения передатчика УП ОП. Устройство УП ОП состоит из конденсаторов (СА, Св, Сс) и согласующего трансформатора Т1. Согласующий трансформатор выполнен из трех воздушных дисковых катушек, центры которых расположены на одной оси. Крайние катушки подключаются к фазам А и С сети, и их индуктивности образуют с емкостями СА и Сс фильтры, настроенные на частоту 1003 Гц. Центральная катушка (генераторная) подключается к усилителю мощности УМ передатчика ПД модема. Конструкция Т1 обеспечивает слабую связь между сетевыми и генераторной обмотками и циркуляцию тока несущей частоты на фазах А и С при полном отсутствии отсоса в фазу В. Конденсатор С подключен к фазе В для симметрирования емкостного тока 50 Гц, обмотки Т1 имеют отпайки, обеспечивающие настройку линейных контуров в резонанс на частоте 1003 Гц.
Прием тональных сигналов на ОП от устройств КП, подключенных к линиям 10 кВ, производится по схеме последовательного съема сигналов по току через измерительные трансформаторы тока ТТА и ТТС.
Токовый ввод сигналов тональной частоты на ОП обеспечивает более высокое отношение сигнал/помеха, чем при съеме сигнала по напряжению (во столько раз, во сколько входное сопротивление одной линии больше входного сопротивления опорной подстанции — см., например, [34]).

Рис. 6.4. Структура системы ТМРС-10:
ОП - опорная подстанция; КП 1, . . , КП N - контролируемые пункты распределительной сети 10 кВ; ТРС-1 ПУ - устройство телемеханики пункта управления; ТРС-1 КП - устройство телемеханики КП; АТКС-10 ПУ - приемо-передающая аппаратура тонального канала связи ПУ; УП ОП - устройство присоединения передатчика на ОП; УП ТВС - устройство присоединения приемника на ОП; М - модем; ПР - приемник; ПД - передатчик; УМ - усилитель мощности сигналов передатчика; АТКС-10 КП-К - приемо-передающая аппаратура тонального канала связи на КП при конденсаторном присоединении; АТКС-10 КП-Т - то же при трансформаторном присоединении; УП КП-К - устройство присоединения на КП конденсаторное; КП-Т - присоединение на КП трансформаторное; Т1 - согласующие трансформаторы; ВР - вилитовый разрядник; ТТА, ТТС - трансформаторы тока в фазах А и С на ОП; Т - сетевой трансформатор 10/0,4 кВ; ОМ-1,2 - трансформатор контрольный 10/0,23 кВ; ДЩ - щит - пульт управления; ФН - фильтр нагрузки; TH - трансформатор напряжения
Для независимости уровня помех от числа отходящих от шин подстанции линий 10 кВ сигналы с каждой линии вводятся независимо друг от друга через индивидуальные устройства присоединения с токовым вводом сигнала (УП ТВС), которые подключаются к входу приемника АТКС-10 ПУ через коммутатор КЛ, установленный в устройстве телемеханики ТРС-1.
Устройство УП ТВС представляет собой трансформатор, преобразующий ток сигнала в напряжение и обеспечивающий также сохранность вторичных цепей трансформаторов тока при повреждениях в цепях приемника ОП. Обмотки трансформатора имеют отпайки для подключения к различным трансформаторам тока (50/5; 75/6; 100/5; 150/5; 200/5; 300/5; 400/5).
Способы ввода и съема тональных сигналов на КП зависят от наличия того или иного оборудования на энергообъектах. Присоединение аппаратуры к ВЛ 10 кВ на КП может осуществляться тремя способами:
через отдельный однофазный трансформатор напряжения TH, например ОМ-1,2 10/0,23 (КП1 на рис. 6.4);
через конденсаторы С1.С2 (КП2 на рис. 6.4);
через силовые трансформаторы нагрузки Т 10/0,4 кВ (КП N на рис. 6.4).
Устройства присоединения через силовой трансформатор нагрузки включают в себя два трансформатора связи ТСВ, первичные обмотки которых включены в рабочие фазы последовательно с нагрузкой. Вторичные обмотки ТСВ включены последовательно — встречно. ТСВ выполняются в нескольких модификациях для подключения к сетевым трансформаторам мощности от 25 до 620 кВ · А.
Нагрузка потребителя 0,4 кВ шунтируется фильтром несущей частоты ФН, настроенным в резонанс на частоту 1003 Гц (для защиты нагрузки от напряжения тональной частоты).
При наличии на КП отдельного трансформатора напряжения, например ОМ-1,2 (10/0,23), ввод и съем сигналов тональной частоты можно организовать через него с использованием аппаратуры АТКС-10, КП-Т (на рис. 6.4 КП1).
Трансформаторные присоединения обладают низким КПД, поскольку примерно 95% мощности передатчика теряется в трансформаторе.
Устройство присоединения конденсаторное (УП КП—К) содержит согласующий трансформатор Т1 и две катушки индуктивности L1 и L2, которые совместно с конденсаторами связи С1 и С2 образуют двухфазный фильтр для компенсации реактивного сопротивления конденсаторов связи. Трансформатор Т1 позволяет согласовать входное сопротивление линии с аппаратурой АТКС-10 КП—К. Защита УП КП—К от перенапряжения обеспечивается вилитовыми разрядниками на напряжение 2,0 кВ. В качестве конденсаторов связи С1 и С2 используются конденсаторы типа СММ-20/√3-З5. Конденсаторное присоединение имеет малое затухание на тональной частоте, что позволяет снизить мощность вводимого тонального сигнала в 10—20 раз по сравнению с трансформаторным присоединением [34].
Помехоустойчивость сигналов и достоверность сообщений в системе ТМРС-10
Помехоустойчивость передачи сигналов в системе ТМРС-10 обеспечивается прежде всего высоким соотношением энергии передаваемых сигналов и энергии помех в канале в заданной полосе пропускания фильтров приемных устройств.
Основные помехи при передаче сигналов тональной частоты по электрическим распределительным сетям 10 кВ — это высшие гармонические составляющие промышленной частоты. Источниками помех высших гармоник являются нелинейность сети электроснабжения и нагрузки. Уровни этих помех зависят от конфигурации и параметров элементов сети, режимов и протяженности линий электропередачи, нагрузок и места их подключения и т. п.
В процессе эксплуатации распределительных сетей уровни помех могут существенно изменяться, что может привести к ухудшению соотношению сигнал/помеха, т. е. к ухудшению помехоустойчивости передачи сигналов. Поэтому уровень сигнала следует рассчитывать на наиболее неблагоприятный случай и брать с достаточным запасом, чтобы обеспечить уверенную передачу и прием сигналов в любой точке сети.
Полоса пропускания приемного фильтра тонального канала выбирается, как правило, в диапазоне частот между гармониками промышленной частоты. С учетом того, что расстояние между соседними гармониками составляет 50 Гц, ширина пропускания приемного фильтра должна составлять не более 20—30 Гц.
• С ростом частоты несущей уровень гармонических помех как в напряжении, так и в токе снижается и в диапазоне 20-й гармоники (и выше) становится соизмеримым с уровнем флуктуационных помех, равномерно распределенных в широком диапазоне частот, в том числе и в диапазонах между гармониками. Флуктуационные помехи представляют собой последовательность коротких импульсов, имеющих случайную амплитуду. Частота следования этих импульсов такова, что переходные процессы от их воздействия не успевают затухнуть, образуя непрерывный случайный процесс в широком диапазоне частот (белый шум). При передаче сигналов по распределительным сетям следует учитывать также влияние импульсных помех, источником которых являются ударные нагрузки (сварка, дуговые электропечи, электротяга и т. п.), а также перенапряжения при коммутации в электрических цепях, короткие замыкания и т. п.
По данным экспериментальных исследований, проведенных в конкретных распределительных сетях 6 и 10 кВ [35,36], расчетный уровень флуктуационных помех при работе между гармониками следует принимать равным 0,1% Uном в диапазоне частот 725—1275 Гц (при приеме по напряжению) и 40 мА (при приеме по току). Приняв за исходные эти данные и требования ГОСТ 26205—84 об обеспечении отношения сигнал/помеха не менее 7, получим необходимые уровни принимаемого сигнала (при Uном =6 кВ): Uс ~ 16 В; IС ~ 106 мА.
Наибольшие импульсные помехи по данным института ’’Сельэнергопроект” возникают при перемежающихся замыканиях фазы ВЛ 10 кВ на землю. Уровень помех при этом достигал 120 В на частотах гармоник и 45 В между гармониками. При таких уровнях помех невозможно обеспечить требуемое соотношение сигнал/помеха при приемлемых уровнях передаваемого сигнала. При всех других видах замыканий на землю, кроме перемежающихся дуговых замыканий, уровни помех практически такие же, как и в нормальном режиме.
Как показывает статистика, перемежающиеся дуговые замыкания на землю составляют не более 3% всех видов замыканий на землю. При отсутствии информации с КП телекомплекс ТРС-1 производит многократный опрос КП. Поэтому допустимы относительно редкие сбои в работе телекомплекса, чтобы не завышать уровни передаваемого сигнала. Ложные сообщения при этом практически исключаются примененными защитами.
* Измерения помех и их анализ проводились в распределительных сетях 10 кВ под руководством инж. Г. С. Чиркова.
Достоверность приема сообщений в телекомплексе ТРС-1 обеспечивается высокой помехоустойчивостью сигналов и способом фиксации логических 1 и 0 в приемнике ТРС-1, а также кодовыми защитами. Помехоустойчивость сигналов определяется высоким соотношением сигнал/помеха в полосе пропускания узкополосных фильтров в аппаратуре канала связи. Фиксация логических сигналов 1 и 0 в приемнике ТРС-1 осуществляется многократным сканированием принимаемых элементарных сигналов. В течение импульса, соответствующего логической единице (длительностью t = 160 мс), производится восьмикратное сканирование. Принятый импульс считается логической единицей, если в течение 160 мс будет зафиксировано совпадение принимаемого и сканирующих импульсов не менее 4 и не более 12 раз, т. е. допускается изменение длительности логической единицы 160 ± 80 мс. Сигналы меньшей и большей длительностей бракуются, и фиксируется ошибка при приеме, требующая повторной передачи.
Достоверность приема сигналов ТС определяется, кроме того: использованием помехозащищенного кода с защитой по нечетности в информационных подциклах, принимаемых ПУ;
контролем числа разделительных пауз в информационном ’’окне”; наличием адреса КП, который заведомо известен приемной стороне, благодаря чему ошибки в адресной части сообщения всегда обнаруживаются приемником.
Таким образом, для приема ложного сообщения ТС необходимо, чтобы имели место ошибки в информационной части ’’окна”, приводящие к отказу защиты по паритету при отсутствии ошибок в приеме адреса КП и числе разделительных пауз в ’’окне”. Принимая, что вероятности р перехода 1 →0 и 0 →1 в канале связи одинаковы и взаимонеза- висимы (симметричный канал без памяти), вероятность ложного сигнала ТС можно записать в следующем виде:
![]()
где q = (1 — р) — вероятность правильного приема элементов кода: логической 1, логического 0, разделительного интервала.
Сомножитель q14 учитывает правильность приема четырех разрядов кода адреса КП и восьми разделительных пауз в ’’окне”. Принимая р = 10-4, получаем PЛ.Т.С 10-7.
Достоверность приема сигналов ТУ. Ложная команда ТУ может возникнуть при неправильном приеме кода адреса КП. (При этом вместо заданного номера объекта ТУ может выбраться объект ТУ на другом КП.) Для уменьшения вероятности ложного выбора КП применены защиты кода адреса КП по паритету с двукратным повторением посылок команд ТУ; лишь при полном совпадении обеих посылок выдается разрешение на исполнение принятой команды. Вероятность ложной команды ТУ при этом составит
Сомножитель q6 учитывает необходимость правильного приема шести разделительных пауз в коде адреса КП, сомножитель q5 — вероятность правильного приема кода РИ. При р = 10-4 РЛ.Т.У ≈ 10-15.
Реальное значение величины р с учетом продолжительности t сигнала 1 и 0 и разделительных пауз (t >160 мс) при принятых соотношениях сигнал/помеха и узкополосных приемных фильтрах может быть существенно меньше принятого в расчетах значения р=10-4, рекомендованного в ГОСТ. Поэтому реальные значения вероятности ложных сообщений ТС и ТУ в системе лучше расчетных. Завод—изготовитель комплекса ТРС-1 для характеристики передаваемых сообщений также приводит явно заниженные цифры достоверности: при р=10-4 для ‘сообщений ТС РЛ.Т.У 10-7, для сообщений ТУ РЛ.Т.У=10-10 что соответствует 1-й группе достоверности получаемой информации.
Сопряжение устройств телемеханики типа ТРС с радиоканалом
Организация связи между устройствами ПУ и КП в телекомплексе ТРС- 1 может быть осуществлена не только по каналам тональной частоты, наложенной на распределительную сеть 10(6) кВ, как в системе TMPC- 10, но и по радиоканалу. Для этой цели комплект плат ТРС-1 дополняется платами сопряжения устройств телемеханики ПУ и КП с радиостанциями типа 18Р22С, выпускаемыми воронежским заводом радиоаппаратуры ’’Электросигнал” Минпромсвязи СССР. При использовании радиосвязи информация с КП может передаваться непосредственно на ДП РЭС (минуя переприемы и ретрансляцию сигналов на питающих высоковольтных подстанциях). Упомянутые радиостанции предназначены для беспоисковой бесподстроечной двусторонней радиосвязи на расстоянии до 20—30 км в любое время года и суток. На ПУ устанавливается радиостанция 18Р22М- 1,которая работает на антенну с круговой диаграммой направленности. На контролируемых пунктах в распределительных сетях устанавливаются радиостанции 18Р22С-2, имеющие направленную антенну. Радиостанции на ПУ и всех КП, контролируемых с данного ПУ, работают на одной несущей частоте в следующих диапазонах УКВ: 162, 150—162, 350 МГц; 167,525 - 167,725 МГц; 167,875 - 168,075 МГц.
Выбор рабочей несущей частоты в указанных диапазонах оговаривается при заказе радиостанции и согласуется в установленном порядке с соответствующими организациями. Каждая радиостанция может работать в режиме либо ПЕРЕДАЧИ, либо ПРИЕМА информации, обеспечивая полудуплексную связь между ПУ и всеми КП (по очереди). Алгоритм работы радиостанций задает телекомплекс ТРС. Радиостанция обеспечивает передачу и прием информации по принципу работы дискретных цифровых каналов связи. Непрерывный сигнал заданного уровня на входе канала преобразуется блоком автоматики радиоканала в последовательность дискретных импульсов заданной длительности.
Предусмотрены три скорости передачи дискретных сигналов: 50, 100 и 200 бит/с, т. е. длительность тактов дискретных посылок t составляет соответственно 20, 10 и 5 мс. На вход передатчика радиоканала подаются двоичные кодированные сигналы от передатчиков ТРС. Для передачи логической единицы в радиоканале используется тональная модулирующая частота =2273 Гц, для логического нуля — f0= 2500 Гц. Если логический нуль или единица длятся в течение нескольких тактов дискретных посылок подряд, то между посылками f1 и f0 посылается такт повторения на частоте fn=2777 Гц. Например, маркерный сигнал МС продолжительностью 8t (при скорости передачи 50 бит/с t = 20 мс) передается четырьмя посылками f1, разделенными четырьмя посылками fп.
Аналогично передаются другие двоичные сигналы от передатчиков ТРС. На рис. 6.5, а представлена диаграмма работы радиоканала при передаче одного подцикла команды ТУ ВК с ПУ на КП с адресом 1000(8).
При использовании радиоканала режим работы устройств ТРС практически не меняется. Особенности в работе телекомплекса по радиоканалу сводятся к следующему.
- Устройства ПУ и КП получают исходную тактовую частоту не от синхронной силовой сети 50 Гц, а от кварцованных генераторов блоков автоматики радиостанций 10 кГц. Передача по радиоканалу ведется со скоростью 50 (100, 200) бит/с, а не 6,25 бит/с, как по тональному каналу. Поэтому в плате сопряжения с радиоканалом (СРК) предусмотрен узел делителя частоты 10 кГц, выдающий частоту 0,4 кГц (0,8 кГц, 1,6 кГц) на входы устройств ТРС. Собственный делитель ТРС обеспечивает заданную тактовую частоту работы устройств телемеханики (блок 3 на рис. 6.5, б).
- Для посылки сигналов радиоканал должен быть переведен в режим ПЕРЕДАЧА. Для этой цели от передатчика ТРС в блок автоматики радиоканала РК должен поступать сигнал ПД на уровне логической ”1 ” в течение всего времени передачи. В конце передачи с выхода ТРС должен быть передан импульс Конец передачи, в результате чего радиостанция переходит в режим ПРИЕМ. Переход с режима приема на передачу и наоборот в радиоканале рассматриваемого типа связан с изменением частоты в блоке синтезатора частот (СЧ), что сопряжено с определенными задержками установления частот в фильтрах СЧ. Поэтому сигналы изменения режима должны поступать с некоторым запасом по времени, учитывающим окончание переходных процессов в фильтрах. Это обеспечивается соответствующими моментами подачи импульсов запуска и конца передачи от передатчика ТРС. Импульс разрешения передачи вводится заблаговременно (за время, равное трем- четырем тактам тактовой частоты канала) от формирователя маркерного сигнала МС при вызове ТС либо от кнопки пуска при посылке команд ТУ. Импульс окончания передачи задерживается на два такта (40 мс), чтобы не перестраивать схему при изменении скорости передачи (блок 1 СРК).
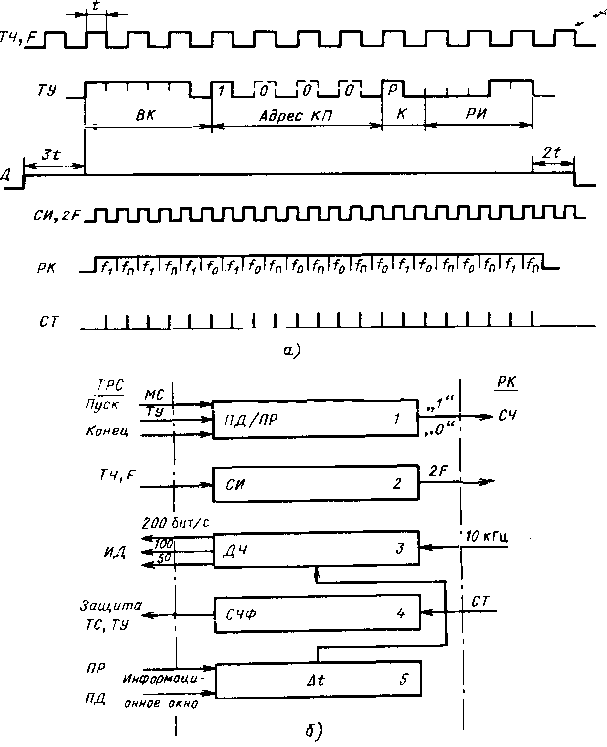
Рис. 6.5. Сопряжение ТРС-1 с радиоканалом:
а - передача команды ТУ по радиоканалу: ТЧ, F - тактовая частота на входе ТРС; ТУ - подцикл команды ТУ; ПД - сигнал передачи; СИ, 2F - синхроимпульсы; РК - импульсы модулирующей частоты в радиоканале; СТ - стробирующие импульсы; б - блок-схема платы сопряжения с радиоканалом (СРК) : 1 - блок переключения режимов передача/прием (ПД/ПР); 2 - блок синхроимпульсов СИ, 2F; 3 - блок формирования импульсов движения; 4 - блок контроля; 5 - блок разделительных интервалов; ТЧ - тактовая частота; ИД - импульсы движения; СИ - синхроимпульсы; ДЧ - делитель частоты; СЧФ - счетчик фронтов в ’’окне”; СТ - стробы; СЧ - синтезатор частот; ∆t - разделительный интервал между информационными окнами
- На время передачи сигналов с передатчика ТРС в блок автоматики РК должны поступать синхроимпульсы СИ с двойной тактовой частотой передачи для формирования импульсов модулирующих частот f1, f2 и fп (блок 2 СРК).
- Принцип передачи дискретных по длительности сигналов в радиоканале позволяет дополнительно контролировать правильность принимаемых сообщений. Приемнику заранее известно, что за заданный интервал времени он должен иметь заданное число фронтов принимаемых тактов, так как каждый соседний такт имеет разную частоту посылок. В информационной части посылки ТС по каждому адресу КП должно быть всегда 8 фронтов, при посылке команды ТУ - всегда 16 фронтов. Если будет принято другое число фронтов, то защита должна запретить исполнение команд ТУ либо выдачу на воспроизведение сигналов ТС. Функцию счета фронтов принимаемых сигналов и разрешения исполнения принятой информации выполняет блок 4 СРК.
- Передача информации с каждого КП должна отделяться разделительными паузами длительностью два такта. Разделительные паузы необходимы для индивидуального перевода радиоканала каждого КП в режим передачи. Все радиостанции системы, кроме передающей, должны находиться в режиме ПРИЕМ*. Получив общий вызывной сигнал от ПУ, передатчики КП переходят в режим передачи по очереди, по мере поступления своего ’’окна” на передачу. Переход с режима приема на режим передачи требует определенного времени, которое должно быть меньше разделительной паузы между ’’окнами”.
Наличие разделительных пауз между ’’окнами” должно учитываться и в приемнике ПУ, чтобы не нарушалась синфазность приема: в течение разделительных пауз приемник ТРС не должен получать тактовые импульсы на переключение распределителя. Функцию задержки тактовых импульсов на время разделительных интервалов выполняет блок 5 СРК.
* Длительный режим передачи приводит к перегреву аппаратуры станции. Режим передачи не должен превышать 15 мин.
КТМ-50 является первым в Советском Союзе промышленным телекомплексом, предназначенным для сбора информации (ТС) с объектов распределительных сетей 10(6) кВ по каналам тональной частоты, наложенной на распределительную сеть промышленной частоты. Комплекс разработан ЭНИН имени Кржижановского совместно с Опытным заводом средств автоматизации и приборов (ОЗАП) Мосэнерго и выпускается ОЗАП [37]. Решения, положенные в основу организации канала тональной частоты из сети к центру управления, впервые осуществленные в КТМ-50, впоследствии были использованы при разработке тонального канала для телекомплекса ТМРС-10.
Комплекс КТМ-50 предназначен для передачи ТС с КП электрических сетей 10(6) кВ на опорную подстанцию. Основная отличительная особенность КТМ-50 состоит в использовании однонаправленного (симплексного) канала связи — от КП к ОП — на одной несущей тональной частоте для передачи ТС со всех КП. Возможность применения симплексного канала связи обеспечивается принятым в КТМ-50 асинхронным методом передачи информации с КП на ОП. Основная область применения КТМ-50 — участки распределительной сети 6(10) кВ с относительно небольшим числом КП (до 10), контроль которых с ОП позволяет повысить надежность электроснабжения потребителей (в первую очередь сельскохозяйственных районов). Устройство телемеханики КТМ-50 обеспечивает работу одного ПУ, установленного на ОП с десятью КП. С каждого КП передается до четырех двухпозиционных сигналов ТС.
Запуск аппаратуры на КП и передача ТС осуществляются в следующих случаях: при включении напряжения питания, при изменении положения датчиков ТС, по истечении контрольного времени с момента последнего запуска (~1 ч), что необходимо для периодического контроля аппаратуры и канала связи.

Рис. 6.6. Временные диаграммы работы КП при одновременном запуске (а) и кодированный сигнал с КП (б) телекомплекса КТМ-50
Прохождение сигналов на ПУ при одновременном запуске передач с нескольких КП обеспечивается асинхронной передачей с каждого КП четырех одинаковых информационных посылок. Временные интервалы между отдельными посылками для всех КП различны и выбраны кратными простым числам.
На рис. 6.6, а представлены временные диаграммы работы трех КП при их одновременном запуске при интервалах между запусками, равными 5ТП, 7ТП и 11Tп, где Тп — длительность одной информационной посылки. Анализ прохождения отдельных информационных посылок с различных КП, проведенный в ЭНИН [39], показал, что принятый вариант временного разделения сигналов обеспечивает вероятность их прохождения не хуже 0,985 при наложениях передач от трех КП.
Для уменьшения вероятности приема ложных сигналов при возможных наложениях сигналов от различных КП, а также от действия помех в каналах связи каждая посылка передается помехозащищенным кодом.
Кодированный сигнал одной информационной посылки показан на рис. 6.6, б. Он содержит синхроимпульс СИ, адрес КП (два импульса из пяти в коде на одно сочетание С), четыре разряда для передачи сигналов ТС, импульс контрольной суммы ТС и разрешающий импульс РИ в последнем разряде.
Организация симплексного тонального канала связи осуществлена по схеме ’’фаза—фаза” и аналогична схеме, впервые использованной при разработке системы телесигнализации ТС-ЭНИН [38]. Несущая частота для передачи сигналов 1003 Гц. Длительность одной кодовой посылки 6,4 с. Скорость передачи сигналов в канале связи 5 бит/с.
С развитием систем циркулярного телеуправления (ЦТУ) выявилась необходимость индивидуального телеуправления выключателями отдельных энергообъектов, а впоследствии и получения телесигнализации из сети для контроля положения выключателей у потребителей и в частности для контроля выполнения команд ЦТУ. В конце 70-х годов появились первые системы ЦТУ с обратной телесигнализацией. Одной из первых таких систем явилась система фирмы Zellweger Uster (Швейцария) : DECABIT (система ЦТУ) и RETROBIT (система ТС).
Рис. 6.7. Кривая избирательности приемника системы DECABIT
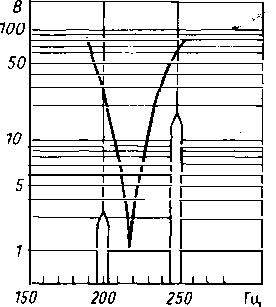
В системе DECABIT используется трехфазное симметричное присоединение генератора тональной частоты на ПУ к шинам 10 кВ питающей подстанции по параллельной схеме ввода через конденсаторы связи либо по последовательной схеме — через трансформаторы тока. Приемники команд ЦТУ включаются у потребителей на стороне низкого напряжения (380, 220 В). Мощность тонального, сигнала, вводимого в сеть на стороне ПУ, должна составлять не менее 0,1 % номинальной мощности трансформаторов сети. Для обеспечения наименьшего затухания в канале связи тональная частота выбирается наименьшей из стандартного набора частот в диапазоне 110—1050 Гц, допустимой в данной конкретной распределительной сети. Для обеспечения высокой избирательности приема сигналов применяются узкополосные фильтры (ширина полосы пропускания фильтра составляет около 6 Гц). Рабочая тональная частота сигнала fр располагается между гармониками промышленной частоты. Типичная кривая избирательности приемника системы DECABIT при fр = 217 Гц представлена на рис. 6.7. Минимальная продолжительность тонального сигнала (логической единицы) 500 мс, т. е. скорость передачи — не более 2 Бод. Импульсная телеграмма системы DECABIT содержит 11 тактов (рис. 6.8, а). Каждый такт длится 0,5 с. Первый такт занимается синхроимпульсом S. Остальные 10 тактов используются для кодирования команд ЦТУ. В системе применено так называемое беспаузное кодирование, т. е. импульсы, соответствующие логической единице, посылаются на каждом такте без разделительных интервалов (рис. 6.8). Стандартная система обеспечивает посылку 100 двухпозиционных индивидуальных команд и 20 двухпозиционных групповых команд (каждая группа содержит по пять объектов ТУ, выполняющих одновременно принятую групповую команду).
Команды ТУ кодируются помехозащищенным кодом на одно сочетание С510 . Суммарное число команд СД = 252, т. е. 126 двухпозиционных команд ВК—ОТ. Для обеспечения посылки индивидуальных и групповых команд посредством стандартной импульсной телеграммы длиной 5,5 с в системе предусмотрен прием кодированных сигналов с одним неконтролируемым импульсом и одним неконтролируемым интервалом в принимаемой последовательности сигналов. Это дает возможность передачи и приема как индивидуальных для данного приемника команд ТУ, так и общих для группы приемников групповой команды.

Рис. 6.8. Кодограммы системы DECABIT:
а - стандартная команда; б - комбинированная команда
Таблица 6.1. Коды индивидуальных и групповых команд в системе DECABIT
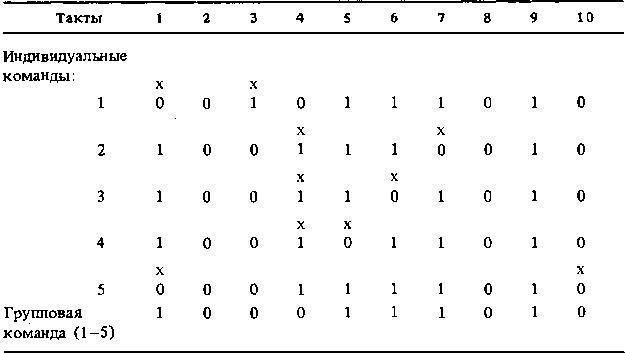
В табл. 6.1 представлены коды команд для индивидуального управления каждым из пяти приемников, а в нижней строке указан код групповой команды для приемников 1—5. Знаком ”х” обозначены неконтролируемые такты в соответствующих приемниках. Получив общую групповую команду, ее выполняют все пять приемников группы, так как за исключением неконтролируемых тактов она является общей для всех этих приемников. На код индивидуальной команды реагирует только соответствующий приемник.
Для увеличения числа передаваемых команд в системе DECABIT предусмотрены комбинированные команды, состоящие из двух типовых посылок, передаваемых последовательно. В первой посылке передается номер группы, в которую входит данный объем управления, во второй - номер самого объекта. Комбинированная посылка содержит разделительную паузу 0,5 с между посылками. Таким образом, длительность передачи комбинированной команды составляет 11,5 с (рис. 6.8, б). Суммарное число комбинированных команд в системе DECABIT достигает 20000, что практически не ограничивает число потребителей, подключаемых к системе. Приемники, устанавливаемые у потребителя, выполняются на две и четыре двухпозиционные команды.
Система RETROBIT дополняет ЦТУ обратной телесигнализацией. Передатчики RETROBIT подключаются к сети низкого напряжения между двумя фазами сети 220, 380 В. Каждый передатчик работает на собственной тональной частоте, отличной от частоты передатчика DECABIT в диапазоне от 120 до 180 Гц. В этом диапазоне может быть размещено до 30 узкополосных каналов тональной частоты. Для улучшения избирательности узкополосных фильтров в системе RETROBIT применены синхронные фильтры, резонансная частота которых автоматически изменяется от изменения частоты энергосистемы. Тем самым устраняется влияние возможного изменения промышленной частоты на работоспособность системы, поскольку любое изменение промышленной частоты вызывает пропорциональное изменение резонансных частот передатчика и приемника и сохраняет высокую избирательность системы. Приемники RETROBIT на ПУ подключены к сети 10 кВ по схеме токового съема сигнала тональной частоты к трансформаторам тока линий 10 кВ (рис. 6.9). Передатчик RETROBIT на КП запускается по запросу с ПУ через систему DECABIT либо автоматически при переключении контролируемых выключателей. Сигналы ТС от приемника RETROBIT на ПУ могут вводиться в ЭВМ для их анализа и регистрации (запоминания). Передатчик DECABIT на ПУ управляется программой, задающей моменты передачи отдельных команд ЦТУ и их продолжительность. Команды могут также набираться вручную диспетчером с пульта управления системы. Емкость передающего устройства RETROBIT - до 8 ТС.
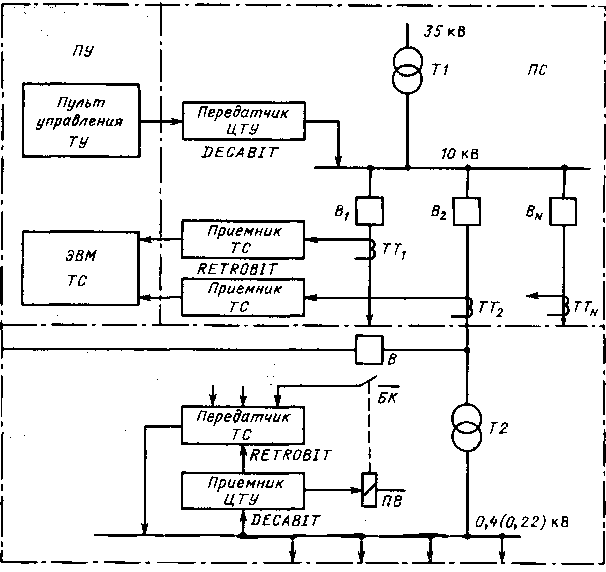
Рис. 6.9. Схема подключения приемников и передатчиков систем DECABIT и RETROBIT к распределительной сети:
Т1 - трансформатор ПС 38/10 кВ; 12 - трансформатор потребителя 0,4 (0,22) кВ; В1, . . , ΒΝ - выключатели линий 10 кВ; В - секционирующий выключатель; ПВ - привод В; БК - блок-контакт В
Аналогичные системы ЦТУ с обратной телесигнализацией выпускаются также фирмами Landis & Gyr (Швейцария) и EdF (Франция). Так, фирма Landis & Gyr производит систему ЦТУ SEMAGYR-50 и систему обратной ТС SEMAGYR-R. Кодовая телеграмма SEMAGYR-50 содержит 50 тактов (50 импульсов, разделенных паузами). Длительность такта - примерно 0,6 с. Длительность одной команды на управление 50 приемниками - около 30 с. Разделение приемников на группы позволяет увеличить число приемников. Так, имеются системы, в которых 9 импульсов выделяются для кодирования адресов групп в коде С = 84 группы. Оставшиеся 40 импульсов используются для передачи 20 двупозиционных команд, и, таким образом, суммарная емкость системы составляет 1680 двухпозиционных команд. Дальнейшее увеличение емкости системы достигается введением подгрупп. Распределение тактов в системе SEMAGYR-50 с адресами областей (групп) и- районов (подгрупп) следующее: 1-й такт — пусковой импульс (старт); 2—10-й такты (всего 9 импульсов) — код группы — 84 групп; 11-16-й такты (всего 6 импульсов) — код подгрупп С=20 подгрупп;
17—50-й такты (всего 34 импульса) — 17 двухпозиционных команд ЦТУ.
Общее число двухпозиционных команд ЦТУ в системе SEMAGYR-50 составляет 84x 20x 17=28 560.
Система обратной телесигнализации SEMAGYR-R в принципе аналогична системе RETROBIT.
СПИСОК ЛИТЕРАТУРЫ
1. Международный электротехнический словарь. Глава 371 ’’Телемеханика”, МЭК, публикация 50 (371), Швейцария, 1984.
2. Забегалов В. А., Ориов В. Г., Семенов В. А. Автоматизированные системы диспетчерского управления в энергосистемах. М.: Энергоатомиздат, 1984.
3. Ильин В. А. Телеуправление и телеизмерение. М.: Энергоиздат, 1982.
4. Малов В. С., Купершмидт Я. А. Телеизмерение. М.: Энергия, 1975.
5. Малов В. С., Дмитриев В. Д. Кодо-импульсные телеизмерительные системы. М.: Энергия, 1964.
6. Митюшкии К. Г. Телемеханика в энергосистемах. М.: Энергия, 1975.
7. Применение ЭВМ для автоматизации технологических процессов в энергетике/ Под ред. В. А. Семенова. М.: Энергоатомиэдат, 1983.
8. Тутевич В. Н. Телемеханика. М.: Высшая школа, 1985.
9. Пшеничников А. М., Портнов М. Л. Телемеханические системы на интегральных микросхемах. М.: Энергия, 1977.
10. Райнес Р. Л., Горяииов О. А. Телеуправление. М.: Энергия, 1965.
11. Прангишвили И. В. Микропроцессоры и микро-ЭВМ. М.: Энергия, 1979.
12. Вычислительные сети и сетевые протоколы/ Д. Дэвис, Д. Барбер, У. Прайс, С. Соломонидес. М.: Мир, 1982.
13. Ги К. Введение в локальные вычислительные сети. М.: Радио и связь, 1986.
14. Самойленко С. И. Сети ЭВМ. М.: Наука, 1986.
15. Якубайтис Э. А. Архитектура вычислительных сетей. М.: Статистика, 1980.
16. Питерсон У. Коды, исправляющие ошибки. М.: Мир, 1964.
17. Funk G. Data integrity and efficiency of single parity chec product codes. NTZ Archiv. 1985, Band 7, H. 4. P. 73-78.
18. Damsker D. J. Reliability and speed-major performance of distributed control. N.Y. IEEE. 1985.P.538-542.
19. Теория кодирования: Сб. статей/ Под ред. З. Л. Блох. М.: Мир, 1964.
20. Щукин Б. К. Основы техники телеуправления. М.-Л.: Госэнергоиздат, 1945.
21. Бутаев Г. М. Разработка принципов и основы теории построения помехоустойчивых систем телеизмерений с использованием естественной избыточности сигналов и сообщений: Автореф. дис. . . . доктора техн. наук М., 1984.
22. Митюшкии К. Г. Методы повышения надежности цифровых телеизмерений// Информационное обеспечение диспетчерского управления в электроэнергетике. Новосибирск: Наука, 1985. С. 175-180.
23. Вулис А. Л., Майборода Г. А., Митюшкии К. Г. Безызбыточный код помехозащищенный в зоне передаваемых сообщений. XI симпозиум по проблеме избыточности в информационных системах// Тезисы докладов. Л.: Изд-во ЛИАП. 1986. Т.1. С. 81-84.
24. Митропольский А. К. Интеграл вероятностей. Л.: Изд-во ЛГУ, 1972.
25. Информационное обеспечение диспетчерского управления в электроэнергетике/ Ю. И. Алимов, А. З. Гамм, Г. Н. Полева и др. Новосибирск: Наука, 1985.
26. Гамм А. З. Оценивание состояний. М.: Наука, 1980.
27. Митюшкин К. Г. Погрешность передачи телеизмерений в многоуровневых системах диспетчерского управления// Электричество. 1980. № 9. С. 1-7.
28. Кемельмахер Л. Г., Лондер М. И., Митюшкин К. Г. Средства и системы управления в энергетике. Вып. 10. М., Информэнерго, 1987.
29. Митюшкин К. Г. Принципы построения и основы теории функционирования многоуровневых телеинформационных систем: Автореф. дис. . . . доктора техн. наук. М., 1981.
30. Микропроцессорная система телемеханики АИСТ/ К. Г. Митюшкин, А. Л. Вулис, С. В. Горшков, И. М. Перельман// Энергетик. 1987. № 4-5. С. 19-21.
31. Телекомплекс ГРАНИТ// Энергетик. 1987. № 4. С. 22.
32. Новые разработки телемеханических комплексов завода ’’Электропульт”/ Б. А. Корнилов, В. А. Клемин, В. 3. Жак и др. Тезисы докладов II научно-технической конференции по состоянию и развитию систем и средств передачи информации в энергосистемах. Свердловск, 1984.
33. Митюшкин К. Г., Орнов В. Г. Сети сбора информации на базе микропроцессоров. Средства и системы управления в энергетике. Вып. 1. М., Информэнерго, 1985.
34. Микуцкнй Г. В., Скитальцев В. С. Высокочастотная связь по линиям электропередачи. М.: Энергоатомиздат, 1987.
35. Бондаренко Л. Г. Исследование уровня помех в токах нагрузки линий электропередачи 10 кВ// Изв. вузов. Энергетика. 1983. № 9. С. 15-19.
36. Бондаренко Л. Г., Стасенко В. Ф., Скрыль В. Ф. Определение спектрального состава тока замыкания на землю в сетях 6-10 кВ// Изв. вузов. Энергетика. 1983. №12. С. 23-29.
37. Телемеханический комплекс КТМ-50 для распределительных сетей 6- 10 кВ/ Н. С. Берлин, А. М. Пономарев, Е. С. Толмачева и др.// Электрические станции. 1985. №4. С. 47-51.
38. Берлин Н. С. Анализ характеристик асинхронной системы телесигнализации для распределительных сетей 6—10 кВ/ Теория и техника передачи сигналов тональной частоты по линиям электрических сетей// Тр. ЭНИН. 1983. № 4.
39. Георгиевская Τ. Е., Гожанский Р. А., Митюшкин К. Г. Система телемеханики ТМРС-10 для распределительных электрических сетей. Телеинформационные системы реального времени для диспетчерского управления энергосистемами// Сб. трудов ВНИИЭ. 1985. Вып. XV. С. 120-124.
40. Анализ опыта эксплуатации систем телемеханики/ Сб. Союзтеэнерго. М., 1986.
41. Публикации МЭК, ТК-57, в области устройств и систем телемеханики, 1988 г.:
870.1.1 General Considerations - Section 1, General Principles;
870.1.2 Guide for Specifications;
870.1.3 Glossary;
870.2.1 Operational conditions - Section 1, Environmental Conditions and Power supplies;
870.3 Interfaces (Electrical);
870.4 Performance requirements.
УКПМ, техническое описание и инструкция по эксплуатации
В связи с постоянной работой по совершенствованию в конструкцию изделия могут быть внесены несущественные изменения, не отраженные в настоящем издании, но не ухудшающие работу изделия.
ВВЕДЕНИЕ Настоящий документ предназначен для изучения устройства УКПМ (далее - устройство), устанавливаемого на телемеханическом контролируемом пункте.Принятые в настоящем документе условные сокращения и обозначения:- АП - адрес телемеханического контролируемого пункта;
- ОТ - опрос требования на обслуживание;
- ТЧ - сигнал тональной частоты, используемый для обмена сообщениями с пунктом управления;
- ТИТ - телеизмерение текущих значений параметров;
- ТИА - телеизмерение аварийных значений параметров, изменяющихся непрерывно во времени;
- ТИИ - телеизмерение интегральных значений параметров;
- УПУ - устройство пункта управления.
- D27:20 - вывод 20 микросхемы D27;
- D27.2 - 2-й элемент микросхемы D27;
- знак "*" - инверсия сигнала, обозначение которого предшествует этому знаку. Например, обозначение "DS*" означает инверсный сигнал "DS".
Остальные термины и определения соответствуют ГОСТ 26.005-82 и общепринятым в технической литературе.
НАЗНАЧЕНИЕУстройство устанавливается на телемеханическом контролируемом пункте (КП) и предназначено для выполнения следующих функций:- измерение текущих значений аналоговых сигналов (ТИТ),
- ввод дискретных сигналов от датчиков телесигнализации (ТС),
- вывод сигналов телеуправления (ТУ),
- ввод импульсных сигналов от датчиков и счета числа импульсов (ТИИ),
- первичная обработка информации о введенных сигналах,
- обмен телеинформацией с устройством пункта управления (УПУ).
Кодирование сообщений по каналу ТЧ - кодо-импульсное.
Модуляция сообщений - частотная с двумя фиксированными характеристическими частотами.
Скорость передачи сообщений по каналам ТЧ должна устанавливаться любой из ряда: 100, 200, 300 и 600 Бод.
Устройство должно обмениваться телемеханическими сообщениями с УПУ в режиме циклического опроса.
Уровень сигнала на выходе передатчика канала ТЧ должен регулироваться от минус 28 до 0 дБ, чувствительность приемника - не хуже минус 30 дБ.
Питание устройства осуществляется от сети переменного тока напряжением (220+33-44) В, частотой (50±2,5) Гц (основной источник) или от источника постоянного тока напряжением (24...27) В (резервный источник).Мощность, потребляемая устройством от основного или резервного источника питания, не более 30 ВА. Максимальная пиковая мощность, потребляемая устройством от источников питания при установивших. Характеристики каналовХарактеристики подканалов ввода ТИТ устройства
Подканалы ввода ТИТ устройства обеспечивают работу с датчиками, выходные сигналы которых должны быть представлены величиной постоянного тока в диапазонах:
от минус 5 до плюс 5 мА;
Характеристики подканалов ввода ТС
Устройство обеспечивает работу с датчиками ТС контактного и бесконтактного типов.
Сопротивление контакта контактного датчика должно быть:
- не более 200 Ом (вместе с подводящими проводами) - для замкнутого состояния контакта;
- не менее 200 кОм - для разомкнутого состояния контакта.
Для бесконтактных датчиков состояние "включено" должно быть представлено уровнем напряжения постоянного тока от 0 до 1,2 В или таким же падением напряжения на открытом переходе коллектор-эмиттер транзистора при вытекающем токе входа подканала 10 мА, состояние "выключено" - от 19,2 до 28,8 В или током утечки закрытого перехода коллектор-эмиттер транзистора, не превышающем 100 мкА при напряжении 30 В.
Характеристики подканалов вывода ТУ устройства
Подканалы вывода ТУ устройства обеспечивают в режиме исполнения команды на нагрузке сопротивлением 220 Ом±10% постоянный ток величиной не менее 80 мА в течение установленного времени. Установка времени производится в интервале от 400 мс до 20 с с шагом 400 мс.
Характеристики канала ТЧ устройства
Устройство обеспечивает обмен сообщениями с устройством пункта управления:
- по некоммутируемым каналам связи тональной частоты с двух- или четырехпроводным окончанием;
- по физическим двух- или четырехпроводным линиям связи;
- по радиоканалам с полудуплексным каналом.
Модуляция передаваемых сообщений - частотная. Кодирование передаваемой информации - кодо-импульсное. Устройство обеспечивает гальваническое разделение линейных цепей приема и передачи сигнала тональной частоты.
Уровень сигнала ТЧ на выходе канального передатчика регулируется в диапазоне от минус 28 до 0 дБ (от 30 мВ до 0,775 В). Чувствительность приемника ТЧ плавно регулируется в диапазоне от минус 30 до 0 дБ.
Выходной импеданс передатчиков ТЧ - (600±60) Ом. Входной импеданс приемников ТЧ - (600±60) Ом в диапазоне частот от 300 до 3400 Гц.
Скорость обмена телеинформацией между УПУ и УКПМ может быть установлена любой из ряда: 100, 200, 300 и 600 Бод. Порядок установки скорости обмена приведен в разделе 8.
Устройство в процессе эксплуатации устойчиво к воздействию температуры окружающего воздуха от минус 40 до плюс 70°C при максимальной скорости изменения температуры 20°C/ч.
Устройство в процессе эксплуатации устойчиво к воздействию относительной влажности окружающего воздуха от 5 до 95 %.
УСТРОЙСТВО И РАБОТА УКПМ
Конструкция устройства
Устройства УКПМ выпускаются по исполнениям и состоят из двух типов блоков: КПМ и БКС. Блоки КПМ содержат функциональные контроллеры и модули, а блоки БКС содержат клеммники для монтажа цепей датчиков. Блоки КПМ и БКС, в свою очередь, тоже выпускаются по исполнениям. Исполнения блоков КПМ различаются типом модуля, устанавливаемого в позиции 5 на рис.1. Исполнения устройств УКПМ указаны в табл.2, блоков КПМ - в табл.3, блоков БКС - в табл.7.
Таблица 2
Исполнение устройства УКПМ | Исполнения блоков | |
| КПМ | БКС |
УКПМ-4 и УКПМ-4М1 | КПМ-4 | БКС-4 и БКС-5 |
УКПМ-5 и УКПМ-5М1 | КПМ-5 | БКС-3 |
УКПМ-6 и УКПМ-6М1 | КПМ-6 | БКС-1 и БКС-2 |
УКПМ-7 и УКПМ-7М1 | КПМ-7 | БКС-3 |
Таблица 3
Позиция | Наименование | Количество по исполнениям блоков КПМ | |||
на рис.1 |
| КПМ-4 | КПМ-5 | КПМ-6 | КПМ-7 |
1 | Блок питания БПКП.М | 1 | 1 | 1 | 1 |
2 | Контроллер КТМС-М2* | 1 | 1 | 1 | 1 |
3 | Контроллер КУКП | 1 | 1 | 1 | 1 |
4 | Модуль МВТС | 1 | 1 | 1 | 1 |
5 | Модуль МВТС | 1 |
|
|
|
| Модуль МВТУ |
| 1 |
|
|
| Модуль МВИС |
|
| 1 |
|
6 | Модуль МВТУ | 1 | 1 | 1 | 1 |
* Для исполнений устройства УКПМ-4М1, УКПМ-5М1, УКПМ-6М1 и УКПМ-7М1 применяется контроллер КТМС-М4, отличающийся от контроллера КТМС-М2 увеличенным размером архива событий | |||||
Клеммники блоков БКС подключаются штатными жгутами к модулям блока КПМ. К модулям типа МВТУ подключаются блоки реле-повторителей БРП (до четырех блоков к одному модулю). Габаритный чертеж блока КПМ приведен на рис.1.

Рис.1 . Чертеж общего вида блока КПМ. Расположение контроллеров и модулей:
1 - блок питания БПКП.М;
2 - канальный контроллер КТМС;
3 - контроллер ввода-вывода КУКП;
4 - модуль МВТС;
5 - по исполнениям блока КПМ: модуль МВИС, МВТС, МВТУ;
6 - модуль МВТУ
Блок КПМ имеет модульную конструкцию и содержит фукциональные элементы - модули и контроллеры (далее - элементы): БПКП.М, КТМС, КУКП, МВТС, МВИС и МВТУ. Каждый элемент выполнен на печатной плате, размещенной в индивидуальном пластмассовом кожухе.
На лицевых панелях элементов расположены индикаторы и присоединительные разъемы для подключения линии связи с УПУ, жгутов БРП и клеммников БКС. С тыльной стороны элементы оснащены разъемами для подключения к магистрали информационного межэлементного обмена.
Элементы укрепляются на вертикально расположенном шасси, обеспечивающем их механическое крепление и электрическую связь. В нижней части элементы имеют специальные кронштейны для зацепления за элементы шасси, а в верхней части крепятся винтом. В передней части блока КПМ элементы охватываются рамкой, к нижней части которой крепится кабеледержатель.
БКС предназначен для монтажа цепей датчиков ТИТ, ТС и ТИИ. Назначение контактов клеммников и описание конструкции блоков БКС приведены в пункте 6.8.
Структурная схема устройства приведена на рис.2..
Рис. 2 . Структурная схема устройства
Информационный обмен устройства с УПУ
Устройство обменивается с УПУ телемеханическими сообщениями (далее - сообщения) по запросу УПУ. Функционально сообщения различаются на:
- команды УПУ:
- опрос требования устройства на обслуживание (ОТ),
- телеуправление включением (ТУВ),
- телеуправление отключением (ТУО),
- настройка уставок ТИТ (НУТИТ);
- запросы УПУ:
- запрос группы ТС (ЗГТС),
- запрос группы КДС (ЗГКДС),
- запрос группы ТИТ (ЗГТИТ),
- запрос массива ТС (ЗМТС),
- запрос группы ТИИ без сброса (ЗГТИИ1),
- запрос группы ТИИ со сбросом (ЗГТИИ2),
- запрос значений уставок ТИТ текущих значений (ЗУТИТ)
- запрос блока ошибок оборудования (ЗБО);
- известительные сообщения УКПМ:
- данные группы ТС (ГТС),
- данные массива ТС (МТС),
- данные группы ТИТ (ГТИТ),
- данные группы ТИИ без сброса (ГТИИ1),
- данные группы ТИИ со сбросом (ГТИИ2),
- значения уставок ТИТ (УТИТ).
Выполняемыми устройством функциями считаются процедуры обработки устройством команд и запросов УПУ.
Структура сообщений, в общем виде, представлена на рис.3. Все коды в сообщении устанавливаются в положительной логике.
Лидер | Адрес УНУ | Код функции | Номер группы | Информационная часть | Признак конца сообщения | Код защиты сообщения |
Рис.3 . Общая структура телемеханических сообщений
Лидер, возглавляющий сообщение, представляет собой “нулевую” последовательность. Лидер предназначен для синхронизации приемника канала ТЧ, а также для временной задержки передачи при использовании радиостанции. Длительность лидера устройства устанавливается на предприятии-изготовителе и может быть изменена пользователем репрограммированием УФППЗУ контроллера КТМС.
Адрес УНУ передается одним байтом (далее - байт АП). Два старших разряда АП - признак старта сообщения. По признаку старта приемником производится побитная синхронизация приема сообщения.
Код функции передается одним байтом (далее - байт KФ). Номер группы передается одним байтом (далее - байт НГ).
Данные информационной части передаются побайтно с дополнительным разрядом паритета (нечётность).
Конец сообщения передается одним байтом с дополнительным разрядом защиты (Рз) по паритету (чётность).
Код защиты сообщения представляет собой остаток от деления сообщения без “лидера” и АП на образующий полином: Пз=X9+X5+X3+1. Кодом защиты дополняются все известительные сообщения, содержащие информационную часть.
Устройство, получив по каналу связи сообщение, выделяет его адресную часть, а при идентификации собственного адреса - код функции и сопровождающие его параметры. После выполнения внутреннего цикла проверки достоверности сообщения и обработки полученной команды устройство передает в канал ответное сообщения для УПУ. При обнаружении любой некорректности принятого сообщения или собственной неисправности устройство не отвечает УПУ.
Для примера на рис.4 представлена структура сообщения ОТ.

Рис.4 . Структура сообщения ОТ
При получении от УПУ команды ОТ устройство, идентифицировавшее в сообщении собственный адрес, передает в адрес УПУ одно из нижеследующих сообщений в зависимости от предыстории событий:
- ОТ - при отсутствии зарегистрированных со времени последнего опроса по функции ОТ событий: изменений состояний датчиков ТС или выходов за пределы уставок уровней сигналов с датчиков ТИТ;
- ЗГТИТ- при зарегистрированном со времени последнего опроса по функции ОТ по одному или нескольким каналам ТИТ превышении уровня сигнала уставок допускового контроля. При одновременном появлении аварийных событий в нескольких группах ТИT устройство указывает в сообщении ЗГTИТ номер младшей группы;
- ЗГТС - при зарегистрированных со времени последнего опроса по функции ОТ изменений состояний одного или нескольких датчиков ТС. При одновременном появлении аварийных событий в нескольких группах устройство указывает в сообщении ЗГТС номер младшей группы.
По виду полученного от УКП сообщения УПУ принимает решение о запросе изменившейся информации. Использование команды ОТ позволяет существенно повысить скорость реакции телемеханического комплекса по сбору информации о событиях на контролируемых пунктах.
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | Код функции ОТ=50H |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | Номер группы каналов |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный признак конца сообщения |
Рис.5 . Формат специальной команды опроса ОТ (опрос требований)

Рис.6 . Процедура обслуживания события ТС УКПМ
Функции ТУ устройства
Для обеспечения требуемой достоверности телеуправления при передаче по каналам ТЧ посылки ТУВ и ТУО дублируются УПУ с интервалом приблизительно 400 мс. Адресованное устройство сравнивает оба полученные сообщения и при их идентичности исполняет команду ТУ.
Процессор КТМС в фазе обмена с КУКП передает последнему команду ТУ. Процессор КУКП в фазе исполнения команды устанавливает выбранный канал модуля МВТУ в активное состояние. В фазе обслуживания модуля МВТУ процессор КУКП проверяет состояние ключей модуля. В фазе обмена с КТМС процессор КУКП передает КТМС информацию о состоянии ключей модуля МВТУ. При неаварийном состоянии ключей процессор КТМС (устройство) выдает в адрес УПУ сообщение-квитанцию о нормальном исполнении команды ТУ. После этого в течение еще N проходов основного программного цикла процессор КУКП удерживает выбранные ключи ТУ в активном состоянии, а затем их отключает. Значение N может быть установлено пользователем репрограммированием УФППЗУ контроллера КТМС.
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | Код функции ТУВ=70H или |
1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | ТУО=E0H |
А7 | А6 | А5 | А4 | А3 | А2 | А1 | А0 | РЗ | Номер группы каналов |
P8 | P7 | P6 | P5 | P4 | P3 | P2 | P1 | РЗ | Номер канала (позиционный код) |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный признак конца сообщения |
Рис.7. Формат команд ТУО и ТУВ (телеуправление отключением и включением)
Рис.8. Процедура обмена УПУ-КП в режимах ТУВ и ТУО
По запросу УПУ известительной информации (сообщение типа ЗС - запрос сообщения) устройство выдает блок информации (сообщение типа ИС - известительное сообщение) в соответствии с установленным форматом.
Функции ЗС устройства
По запросам УПУ известительной информации (сообщение типа ЗС - запрос сообщения) устройство выдает блок информации (сообщение типа ИС - известительное сообщение) в соответствии с установленным форматом.
На рис.6 показана процедура обмена сообщениями УПУ-УКП в режимах прямого запроса информации: ЗГТС - ГТС.
Функция ЗМТС устройства
По запросам УПУ известительной информации по массиву ТС устройство выдает блок информации с числом групп ТС, установленным переключателем модуля МВТС устройства. Таким образом можно ограничить размер сообщения МТС числом задействованных на данном КП групп каналов ТС.
Функция ЗБО устройства
По запросам УПУ известительной информации по данным диагностики устройство выдает блок внутренних ошибок устройства.
Функция НУТИТ устройства
По команде НУТИТ производится загрузка в оперативную память устройства блока уставок допускового контроля значений по каналам ТИТ. По запросам УПУ известительной информации по данным уставок устройство выдает блок текущих уставок допускового контроля значений по каналам ТИТ.
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | Код функции МТС=F0H |
А7 | А6 | А5 | А4 | А3 | А2 | А1 | А0 | РЗ | Число групп ТС |
D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | РЗ | Данные группы 1 |
D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | РЗ | Данные группы 2 |
D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | РЗ | Данные группы 3 |
D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | РЗ | Данные группы 4 |
D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | РЗ | Данные группы 5 |
D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | РЗ | Данные группы 6 |
D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | РЗ | Данные группы 7 |
D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | РЗ | Данные группы 8 |
0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | Признак конца информационного блока сообщения |
P8 | P7 | P6 | P5 | P4 | P3 | P2 | P1 | P0 | Код защиты сообщения |
Рис.9. Формат сообщения МТС (массив ТС)
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | Код функции ГТС=90H |
А7 | А6 | А5 | А4 | А3 | А2 | А1 | А0 | РЗ | Номер группы каналов |
D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | РЗ | Данные группы |
0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | Признак конца информационного блока сообщения |
P8 | P7 | P6 | P5 | P4 | P3 | P2 | P1 | P0 | Код защиты сообщения |
Рис.10. Формат сообщения ГТС (группа ТС)
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | Код функции ГКДС=20H |
А7 | А6 | А5 | А4 | А3 | А2 | А1 | А0 | РЗ | Номер группы каналов |
D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | РЗ | Текущее состояние данных группы |
D8 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | РЗ | Флаги событий по каналам группы |
0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | Признак конца информационного блока сообщения |
P8 | P7 | P6 | P5 | P4 | P3 | P2 | P1 | P0 | Код защиты сообщения |
Рис.11. Формат сообщения ГКДС (группа КДС)
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | Код функции ГТИТ=10H |
А7 | А6 | А5 | А4 | А3 | А2 | А1 | А0 | РЗ | Номер группы каналов |
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №1 |
F3 | F2 | F1 | F0 | Зн | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №2 |
F3 | F2 | F1 | F0 | Зн | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №3 |
F3 | F2 | F1 | F0 | Зн | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №4 |
F3 | F2 | F1 | F0 | Зн | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №5 |
F3 | F2 | F1 | F0 | Зн | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №6 |
F3 | F2 | F1 | F0 | Зн | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №7 |
F3 | F2 | F1 | F0 | Зн | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №8 |
F3 | F2 | F1 | F0 | Зн | D10 | D9 | D8 | РЗ |
|
0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | Признак конца информационного блока сообщения |
P8 | P7 | P6 | P5 | P4 | P3 | P2 | P1 | P0 | Код защиты сообщения |
Рис.12. Формат сообщения ГТИТ (группа ТИТ). Здесь Зн - знак значения: 0-"плюс", 1- "минус"
Флаг допускового контроля | F3 | F2 | F1 | F0 |
Не установлен | 0 | 0 | 0 | 0 |
Уставка предаварийной скорости изменения | 0 | 0 | 1 | 0 |
Уставка нижняя предаварийная | 0 | 1 | 0 | 0 |
Уставка верхняя предаварийная | 0 | 1 | 1 | 0 |
Уставка нижняя аварийная | 1 | 0 | 0 | 0 |
Уставка верхняя аварийная | 1 | 0 | 1 | 0 |
Уставка нижняя достоверности | 1 | 1 | 0 | 0 |
Уставка верхняя достоверности | 1 | 1 | 0 | 1 |
Уставка аварийной скорости изменения | 1 | 1 | 1 | 0 |
Рис.13. Коды уставок допускового контроля
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | Код функции ГТИИ1=30H или |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | ГТИИ2=00H |
0 | 0 | 0 |
| А3 | А2 | А1 | А0 | РЗ | Номер группы каналов для: |
|
|
| 0 |
|
|
|
|
| младших слов счетчиков |
|
|
| 1 |
|
|
|
|
| старших слов счетчиков |
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №1 |
D15 | D14 | D13 | D12 | D11 | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №2 |
D15 | D14 | D13 | D12 | D11 | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №3 |
D15 | D14 | D13 | D12 | D11 | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №4 |
D15 | D14 | D13 | D12 | D11 | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №5 |
D15 | D14 | D13 | D12 | D11 | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №6 |
D15 | D14 | D13 | D12 | D11 | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №7 |
D15 | D14 | D13 | D12 | D11 | D10 | D9 | D8 | РЗ |
|
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Канал №8 |
D15 | D14 | D13 | D12 | D11 | D10 | D9 | D8 | РЗ |
|
0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | Признак конца информационного блока сообщения |
P8 | P7 | P6 | P5 | P4 | P3 | P2 | P1 | P0 | Код защиты сообщения |
Рис.14. Формат сообщений ГТИИ1 и ГТИИ2
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | Код функции ЗУТИТ=A0H |
А7 | А6 | А5 | А4 | А3 | А2 | А1 | А0 | РЗ | Номер группы каналов ТИТ |
А7 | А6 | А5 | А4 | А3 | А2 | А1 | А0 | РЗ | Номер канала ТИТ |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный признак конца сообщения |
Рис.15. Формат запроса уставок ТИТ
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
1 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | Код функции УТИ=B0H |
А7 | А6 | А5 | А4 | А3 | А2 | А1 | А0 | РЗ | Номер группы каналов ТИТ |
А7 | А6 | А5 | А4 | А3 | А2 | А1 | А0 | РЗ | Номер канала ТИТ |
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Верхняя уставка |
Х | Х | Х | Х | Зн | D10 | D9 | D8 | РЗ | достоверных значений |
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Нижняя уставка |
Х | Х | Х | Х | Зн | D10 | D9 | D8 | РЗ | достоверных значений |
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Верхняя уставка |
Х | Х | Х | Х | Зн | D10 | D9 | D8 | РЗ | аварийных значений |
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Нижняя уставка |
Х | Х | Х | Х | Зн | D10 | D9 | D8 | РЗ | аварийных значений |
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Верхняя уставка |
Х | Х | Х | Х | Зн | D10 | D9 | D8 | РЗ | предаварийных значений |
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Нижняя уставка |
Х | Х | Х | Х | Зн | D10 | D9 | D8 | РЗ | предаварийных значений |
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Уставка предаварийной скорости |
Х | Х | Х | Х | Зн | D10 | D9 | D8 | РЗ | изменения параметра |
D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | РЗ | Уставка аварийной скорости |
Х | Х | Х | Х | Зн | D10 | D9 | D8 | РЗ | изменения параметра |
0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | Признак конца информационного блока сообщения |
P8 | P7 | P6 | P5 | P4 | P3 | P2 | P1 | P0 | Код защиты сообщения |
Рис.16. Формат сообщения УТИТ (уставки ТИТ). Здесь Зн - знак значения: 0-"плюс", 1- "минус"
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | Код функции ЗГТС=90H, |
0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | код функции ЗГТС=20H |
А7 | А6 | А5 | А4 | А3 | А2 | А1 | А0 | РЗ | Номер группы каналов |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный признак конца сообщения |
Рис.17. Формат запросов ЗГТС и ЗГКДС (запросы группы ТС и КДС)
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | Код функции ЗМТС=F0H |
А7 | А6 | А5 | А4 | А3 | А2 | А1 | А0 | РЗ | Номер группы каналов |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный признак конца сообщения |
Рис.18. Формат сообщения ЗМТС (запрос массива ТС)
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | Код функции ЗГТИТ1=10H |
А7 | А6 | А5 | А4 | А3 | А2 | А1 | А0 | РЗ | Номер группы каналов |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный признак конца сообщения |
Рис.19. Формат сообщения ЗГТИТ (запрос группы ТИТ)
Информация сообщения в порядке выдачи в линию | Содержание информации | ||||||||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|
1 | 1 | 1 | А4 | А3 | А2 | А1 | А0 | РЗ | Адрес УНУ |
0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | Код функции: ЗГТИИ1=30H или |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | ЗГТИИ2=00H |
0 | 0 | 0 |
| А3 | А2 | А1 | А0 | РЗ | Номер группы каналов для: |
|
|
| 0 |
|
|
|
|
| младших слов счетчиков |
|
|
| 1 |
|
|
|
|
| старших слов счетчиков |
0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный признак конца сообщения |
Рис.20. Формат сообщений ЗГТИИ1 и ЗГТИИ2 (запрос группы ТИИ без сброса и со сбросом счетчиков)
Устройство и работа контроллера КУКП-3
В контроллере КУКП-3 конструктивно объединены два функциональных узла:
- узел УАЦП ввода и аналого-цифрового преобразования непрерывных во времени сигналов с датчиков ТИТ;
- контроллер ввода-вывода, обеспечивающий управление модулями МВТС, МВТУ и МВИС.
Число аналоговых входов контроллера КУКП-3 - 32.
Входы ТИТ контроллера КУКП-3 - токовые, на входе канала установлен токовый шунт, рассчитанный на 5 мА. Низкопотенциальные цепи каналов имеют общую точку, которая должна быть связана с землей (на клеммнике). Высокопотенциальные цепи имеют защиту от повреждающих помех и коммутируются.
Контроллер КУКП-3 выпускается взамен ранее выпускавшихся контролеров КУКП, КУКП-М, КУКП-2 и может использоваться для их замены. Исполнение контроллера КУКП-3, поставляемого отдельно для замены контроллеров типа КУКП и КУКП-М оговаривается при заказе.
Габаритные размеры КУКП-3 - 25025430 мм.
Масса КУКП-3 не превышает 0,5 кг.
Питание КУКП-3 осуществляется от блока питания БПКП.М напряжением 27 В постоянного тока. Мощность, потребляемая КУКП-3 от блока питания, не превышает 5,5 Вт.
Схема электрическая функциональная КУКП-3 приведена на рис.21. Схема электрическая принципиальная контроллера КУКП-3 приведена в приложении 1. Контроллер состоит из следующих основных узлов (в скобках приведено позиционное обозначение элементов на схеме электрической принципиальной контроллера):
- узел УАЦП (редакции с 14.11.96г.):
- ТШ токовые шунты 5 мА (R1-R32);
- УЗП узел защиты от перенапряжения (VD4-VD19, VD23-VD70);
- КК коммутатор каналов (DA1-DA4);
- УС усилители суммирующие (DA5-DA6, R39-R70, R77-R84, R86-R93);
- УОН буферный усилитель опорного напряжения Uоп=-1,25 В (DА8, R96, R97);
- Г генератор (DD2.1, DD2.2, C8, R85);
- АЦП аналого-цифровой преобразователь (DА7);
- ОР оптронная развязка аналоговой части (VD1-VD3, VD20-VD22, VD71);
- узел контроллера ввода-вывода КВВ (редакции c 14.11.96г.):
- МП микропроцессорное устройство (2D2, 2G1, 2D4, 2D3);
- ПЗУ постоянное запоминающее устройство (2D1);
- ОЗУ оперативное запоминающее устройство (2D5);
- ПИТ параллельный интерфейс с таймером (2D8);
- РСТ схема рестарта микропроцессора (2D9);
- ММИ межмодульный интерфейс блока КПМ (2D10-2D15);
- узел источника питания ИП (E1).
Рис.21 . Схема электрическая функциональная контроллера КУКП-3
Работа узла УАЦП контроллера КУКП-3
Каналы ТИТ контроллера КУКП-3 имеют гальваническую развязку от процессорного узла контроллера КУКП-3, которую обеспечивают:
- элементы ОР1 - оптоэлектронная развязка логических цепей,
- источник питания ИП - по цепям питания.
Условные обозначения цепей и одноименных сигналов, обеспечивающих электрическую связь и функционирование УАЦП и процессорного узла:
- ADR0, ADR1 сигналы управления выбором группы каналов ТИТ;
- TRFS сигнал разрешения УАЦП для ввода результата измерения в МП;
- SCLK тактовый сигнал обмена данными;
- DOUT передаваемые на УАЦП данные;
- EN разрешение выбора каналов;
- DIN принимаемые от УАЦП данные измерений;
- OV общий проводник цепей управления и данных.
Рассмотрим измерительный тракт УАЦП на примере одного (первого) канала контроллера. Измеряемый ток с выхода датчика поступает по цепям ТИТ01-1 (высокопотенциальный вход) и ТИТ01-0 (низкопотенциальный вход) на токовый шунт ТШ. Падение напряжения на шунте, пропорциональное величине входного тока, поступает на вход сумматора УС через узел защиты от перенапряжения УЗП и открытый канал коммутатора КК. На второй вход сумматора подается опорное напряжение минус 1,25 В с выхода УОН. В результате на выходе УС (на входе АЦП) формируется напряжение:
![]() ,
,
где: Iвх - входной ток; Rш - сопротивление шунта. Для входных токов от минус 5 до плюс 5 мА при Rш»500 Ом интервал значений Uх составляет от 0 до 2,5 В. Напряжение Uх преобразуется АЦП в кодовую форму и передается через оптронную развязку ОР в процессорный узел. Процессор имеет доступ к входному коммутатору КК, обеспечивая переключение каналов. Систематическая инструментальная погрешность канала измерения компенсируется процессором контроллера по тарировочным коэффициентам, устанавливаемым при выпуске контроллеров в ППЗУ.
Схема РСТ (тайм-сторож) предназначена для начального пуска микропроцессора и его рестарта в случае сбоя программы. В процессе выполнения основного цикла программы микропроцессор МП должен периодически выдавать на узел РСТ сигнал регенерации тайм-сторожа. Если МП это условие не выполняет, схема РСТ вырабатывает сигнал RES рестарта МП.
Вилка "ДИАГНОСТИКА", выведенная на лицевую панель контроллера, предназначена для подключения отладочного оборудования при техническом обслуживании контроллера или управляемых им модулей. При подключении адаптера типа ТА-3 процессор контроллера КУКП-3 обеспечивает вывод на дисплей адаптера запрашиваемых (переключателями адаптера) реальных данных из оперативной памяти.
Межмодульный интерфейс ММИ функционирует под управлением МП через программируемый интерфейс элемента ПИТ. Вилка "ИНТЕРФЕЙС УКПМ", выведенная на тыльную панель КУКП-3, предназначена для связи с модулями и контроллерами УКПМ по магистрали межмодульного интерфейса, а также для ввода цепей электропитания контроллера.
Блок-схема алгоритма работы контроллера КУКП-3 приведена на рис.22. На блок-схеме обозначены:
- Uоц - систематическая составляющая смещения нуля тракта измерения;
- Uо - текущее контрольное значение смещения нуля тракта измерения;
- Uэт - текущее контрольное значение ИОН;
- Км - поправочный коэффициент нормирования значений.
Процедура цифровой обработки результатов измерения обеспечивает подавление в выходном значении помехи промышленной частоты 500,5 Гц на нормируемом уровне.

Рис.22 . Блок-схема алгоритма работы контроллера КУКП
Работа контроллера КУКП-3 в режиме ввода-вывода дискретных сигналов
Контроллер КУКП-3 обеспечивает управление модулями по цепям ММИ:
- 1/2 (MUX) цепь управления выбором информационного байта. При 1/2=0 - на линиях данных установлено значение младшего байта данных, при 1/2=1 - старшего;
- RD (REA) синхронизирующий сигнал чтения информации. При RD=0 - процессор КУКП-2 осуществляет чтение информации из выбранного модуля. Модуль, зафиксировавший состояние ВМ=0 и RD=0, должен выставить и удерживать на линиях D0...D7 информацию с младшего (при 1/2=0) или старшего (при 1/2=1) регистра;
- WR (WRI) синхронизирующий сигнал записи информации. При WR=0 - процессор КУКП-2 осуществляет запись информации в выбранный модуль. Модуль зафиксировавший состояние ВМ=0 и WR=0, должен подготовить младший (при 1/2=0) или старший (при 1/2=1) регистр к записи в него данных, установленных на линиях D0...D7. Фиксация данных производится модулем при переходе уровня сигнала WR из 0 в 1;
- RESVIS (VIS) сброс счетчиков МВИС-М. При RESVIS=0 - модуль МВИС-М, для которого ВМ=0, должен сбросить счетчик, номер которого установлен на линиях D0...D7;
- ВМ1...ВМ4 выбор (позиционный адрес) модуля;
- D0...D7 данные.
Управление сигналами интерфейсного обмена осуществляется записью в порт РВ ПИТ байта управления. Комбинация состояний разрядов D5, D6 и D7 байта управления определяет позиционный адрес модуля, выбранного контроллером для информационного обмена.
Линии данных D0...D7 ММИ считываются через буфер 2D10, выдача данных на внешние устройства осуществляется через регистр 2D12.
После рестарта процессор контроллера осуществляет тестирование собственных ресурсов: ОЗУ, ПЗУ и таймера. При нормальном завершении внутренних тестов процессор выставляет сигнал (КТМС=1) готовности обмена с контроллером типа КТМС. При работе контроллеров в штатном режиме по контроллер КТМС периодически производит выборку кадра данных у контроллера КУКП-3, что индицируется синхронно мигающим индикатором "РБТ" на лицевой панели КУКП-3.
Информационный обмен КУКП с КТМС
Диаграмма обмена между КУКП и КТМС представлена на рис.23. В режиме обмена информацией процессоры КУКП и КТМС поддерживают дисциплину обмена: КУКП принят запрос/команда - выдан кадр сообщения/квитанция.
Передача запроса/команды из КТМС в КУКП производится следующим образом. При готовности обмена с КТМС процессор КУКП устанавливает на линии “КТМС” высокий уровень сигнала КТМС=1. Процессор КТМС, получив состояние КТМС=1, выставляет на линиях ”D0...D7” ММИ первый байт запроса/команды и состояние ОТВЕТ=1. Процессор КУКП через временной промежуток Т1, необходимый для устранения перекоса данных на приеме, считывает данные и информирует о приеме данных состоянием КТМС=0. Получив состояние КТМС=0, процессор КУКП возвращает уровень на линии “ОТВЕТ” в исходное состояние: ОТВЕТ=0. Процесс передачи байта данных из КТМС в КУКП завершен. Последующие байты запроса/команды передаются аналогично.

Рис.23 . Диаграмма обмена между КТМС и КУКП
После анализа полученного запроса/команды процессор КУКП выдает в адрес КТМС информационный кадр/квитанцию. При состоянии ОТВЕТ=0 процессор КУКП выставляет на линиях "D0...D7" ММИ первый байт информационного кадра данных (квитанции). Синхронизация данных через временной промежуток Т2, необходимый для устранения перекоса данных на приеме КТМС, осуществляется состоянием КТМС=1. При получении состояния КТМС=1 процессор КТМС считывает с линий "D0...D7" ММИ данные и выставляет сигнал подтверждения приема данных: ОТВЕТ=1. Процессор КУКП, приняв состояние ОТВЕТ=1, снимает данные с порта А и устанавливает состояние КТМС=0. Получив состояние КТМС=0, процессор КТМС возвращает в исходное состояние сигнал ОТВЕТ: ОТВЕТ=0. Процесс передачи байта данных из КУКП в КТМС завершен. Последующие байты информационного кадра передаются аналогично.
Устройство и работа модуля МВТС-М
Модуль МВТС-М предназначен для ввода дискретных сигналов состояния датчиков ТС. Модуль является пассивным элементом и работает под управлением КУКП-2. Структурная схема МВТC-М представлена на рис.24. Схема электрическая принципиальная модуля МВИС-М приведена в приложении 1. Модуль состоит из следующих основных узлов (в скобках приведено позиционное обозначение элементов на схеме электрической принципиальной модуля редакции от 21.06.95г.):
- ММИ межмодульный интерфейс блока КПМ (X1);
- СУ схема функционального управления узлами модуля (D1, D2, D5);
- ШФ1 шинный формирователь данных объектов выбранной группы (D4);
- ШФ2 шинный формирователь сигналов контроля установленной группы (D3);
- БР буферный регистр фиксации позиционного кода выбора группы датчиков (D6);
- БК блок ключей выбора группы (F1...F8);
- БД блок датчиков тока объекта (E1...E8);
- БКС блок клеммных соединителей для монтажа цепей датчиков ТС (БКС не входит в состав модуля);
- ИП источник питания узлов модуля (B1).
Рис.24 . Схема структурная модуля МВТС-М
Входными неинтерфейсными сигналами МВТС-М являются сигналы с выхода датчиков ТС контактного или бесконтактного типа.
Входными и выходными интерфейсными сигналами модуля МВТС-М являются сигналы ММИ:
D0...D7 сигналы данных;
WR сигнал синхронизации записи данных;
RD сигнал синхронизации чтения данных;
ВМ выбор модуля (ВМ1 или ВМ2 - в зависимости от места установки модуля в блоке КПМ);
1/2 сигнал выбора младшего/старшего байта модуля.
Уровни сигналов данной группы соответствуют: высокий уровень - от 3,5 до 5,5 В; низкий уровень - от 0 до 0,8 В.
При обращении к МВТС-М процессор КУКП выставляет на шину данных D0...D7 позиционный код номера обслуживаемой группы ТС, устанавливает состояния сигналов ВМ=0, 1/2=0 (выбор регистра группы) и WR=0.
Сигналы с шины данных D0...D7 записываются в БР по фронту сигнала WR (переход уровня сигнала на линии “WR” из низкого в высокий). Активным сигналом выбора n-той группы датчиков ТС является состояние Грn=0. Через время Т1, обусловленное задержками установки уровней сигналов в элементах гальванической развязки, процессор КУКП считывает (для контроля) через состояние ключей выбора группы. При состояниях сигналов: ВМ=0, 1/2=0 и RD=0 модуль должен выставить на линиях данных “D0...D7” код, записанный в регистр группы. При состояниях сигналов: ВМ=0, 1/2=1 и RD=0 модуль должен выставить на линиях данных “D0...D7” код, соответствующий состояниям датчиков ТС выбранной группы. Временная диаграмма сигналов при считывании контроллером КУКП данных из модуля МВТС-М представлена на рис.25.

Рис.25 . Диаграмма сигналов при обмене процессора КУКП с модулем МВТС-М
Записывая последовательно номера групп ТС от 1 до n, процессор КУКП производит ввод состояний датчиков ТС (объектов) всех групп.
Габаритные размеры модуля МВТС-М не превышают 30х255х260 мм. Масса модуля МВТС-М не превышает 0,5 кг.
Питание модуля МВТС-М обеспечивается от блока питания БПКП.М постоянным током напряжением 27 В. Ток, потребляемый модулем МВТС-М от блока питания, не превышает 0,2 А. Получаемое от БПКП.М напряжение ИП преобразует в ряд напряжений для собственных нужд:
а) стабилизированное напряжение 5 В для питания функциональной части модуля (основной канал источника);
б) нестабилизированное напряжение 24 В для питания цепей датчиков ТС.
Устройство и работа модуля МВТУ-2
Модуль МВТУ-2 предназначен для выдачи сигналов на исполнительные механизмы агрегатов по командам ТУ.
Модуль является пассивным элементом и работает под управлением КУКП. Структурная схема МВТУ-2 представлена на рис. 26. Схема электрическая принципиальная модуля МВТУ-2 приведена в приложении 1.
Модуль состоит из следующих основных узлов (в скобках приведено позиционное обозначение элементов на схеме электрической принципиальной модуля редакции от 21.06.95г.):
- СУ схема управления модулем; предназначена для обеспечения функционирования основных узлов модуля (D1, D2, D3, D7);
- БР1 буферный регистр; предназначен для фиксации позиционного кода выбора рода операции включить/отключить и группы объектов Гр1В...Гр4О (D4);
- БР2 буферный регистр; предназначен для фиксации позиционного кода выбора объекта ТУ О1...О8 (D5);
- БК блок ключей; предназначен для управления исполнительными реле БРП (E1...E8, F1...F8);
- ШФ буфер данных; предназначен для формирования данных контроля состояний управляющих ключей (D6);
- ИП источник питания; предназначен для питания функциональной части МВТУ-2 и исполнительных реле блока реле-повторителей БРП-1 (А1).
Рис.26 . Схема структурная модуля МВТУ-2
Выходными неинтерфейсными сигналами модуля МВТУ-2 являются:
- TUV1, TUO1,...TUV4, TUO4 - сигналы позиционного кода выбора номера группы ТУ/рода операции: с уровнями:
- высокий уровень (активное состояние) - от 24 до 26 В при токе нагрузки до 0,1 А;
- низкий уровень (пассивное состояние) - не более 1 В.
- TU1...TU8 - сигналы позиционного кода выбора объекта ТУ с уровнями:
- низкий уровень (активное состояние)- не более 1 В при токе нагрузки до 0,1 А;
- высокий уровень (пассивное состояние) - до 26 В.
Входными и выходными интерфейсными сигналами модуля МВТУ-2 являются сигналы ММИ:
D0...D7 сигналы данных;
ВМ выбор модуля (ВМ2 и ВМ3 - по исполнениям блока КПМ);
WR сигнал синхронизации записи данных;
RD сигнал синхронизации чтения данных;
1/2 сигнал выбора номера байта (регистра).
Уровни сигналов данной группы соответствуют: высокий уровень - от 3,5 до 5,5 В; низкий уровень - от 0 до 0,8 В.
Модуль типа МВТУ-2 выпускается взамен модуля МВТУ-М и отличается от него следующим:
- гальваническая развязка выходных цепей модуля выполнена на выходе регистров БР1 и БР2;
- регистры БР1 и БР2 выполнены на микросхемах большей степени интеграции;
- контроль срабатывания выходных ключей модуля осуществляется по величине тока через открытый ключ величиной 5...10 мА;
- на лицевой панели модуля изменена маркировка индикаторов: обозначение “Uп” заменено на “5V”, обозначение “Uл” - на “РБТ”;
- на время выдачи модулем управляющего сигнала на лицевой панели засвечивается индикатор “РБТ”;
- для защиты ключей источник выходных сигналов модуля снабжен ограничителем тока на уровне около 0,2 А;
- выходы модуля защищены диодами от напряжения помехи.
Нагрузкой каналов телеуправления модуля служат обмотки внешних реле-повторителей (установленные в блоках реле-повторителей типа БРП), соединенные в матрицу 8х8. Для каждого из объектов управления выделена пара каналов управления (реле-повторителей): "ВКЛЮЧИТЬ ОБЪЕКТ" (ТУВ) и "ОТКЛЮЧИТЬ ОБЪЕКТ" (ТУО).
Для выдачи команды ТУ процессор КУКП записывает в БР1 позиционный код рода операции/номера группы и контролирует его. Затем производится запись в БР2 позиционного кода выбора объекта и его контроль. Временная диаграмма сигналов обмена контроллера КУКП с модулем МВТУ приведена на рис.27.

Рис.27 . Диаграмма сигналов при обмене контроллера КУКП с модулем МВТУ
Выдача токового сигнала для каждого из реле обеспечивается двумя электронными ключами, коммутирующими каждый из полюсов внутреннего источника постоянного тока напряжением 27 В. Алгоритм управления электронными ключами предусматривает контроль за их состоянием и исключает возможность выдачи ложного сигнала управления при одиночных неисправностях элементов устройства. Алгоритм исполнения устройством команды ТУ приведен на рис.28.

Рис.28 . Алгоритм исполнения устройством команды ТУ
Габаритные размеры модуля МВТУ не превышают 30х255х260 мм. Масса модуля МВТУ не превышает 0,5 кг.
Питание модуля МВТУ-2 обеспечивается от блока питания БПКП.М постоянным током напряжением 27 В. Ток, потребляемый модулем от блока питания, не превышает 0,3 А. Получаемое от БПКП.М напряжение ИП преобразует в ряд напряжений:
а) стабилизированное напряжение 5 В для питания функциональной части модуля (основной канал источника ИП);
б) нестабилизированное напряжение 27 В для питания обмоток реле блока реле-повторителей.
Устройство и работа модуля МВИС-3
Модуль МВИС-3 предназначен для ввода импульсных сигналов каналов ТИИ. Информационная емкость модуля - 31 канал. Модуль является интеллектуальным устройством. Выполнен на однокристальной микроЭВМ (ОМЭВМ). Структурная схема модуля МВИС-3 приведена на рис.29. Схема электрическая принципиальная модуля МВИС-3 приведена в приложении 1. Модуль состоит из следующих основных узлов (в скобках приведено обозначение элементов на схеме электрической принципиальной модуля редакции от 05.05.99г.):
- ВП - входной преобразователь; предназначен для нормирования входных сигналов, фильтрации высокочастотных составляющих сигналов и гальванического разделения цепей датчиков и схемы модуля (B1...B31);
- К - контроллер, выполненный на базе однокристальной микро-ЭВМ (ОМЭВМ); устраняет дребезг сигналов и производит подсчет импульсов с датчиков ТИИ (D4, D5, D6, D7);
- ГК - групповой ключ; предназначен для выбора одной из 4-х групп по 8 каналов ТИИ (D8);
- ТС - тайм-сторож; предназначен для надежного старта ОМЭВМ при включении питания и рестарта ее в случае “зависания” (D1);
- СУ - схема управления; предназначена для управления обменом модуля с КУКП по ММИ (D2, D3);
- ИП - источник питания; предназначен для питания гальванически развязанных цепей датчиков и функциональной части МВИС-3 (A1).

Рис.29 . Схема структурная модуля МВИС-3
Входными неинтерфейсными сигналами модуля МВИС-3 являются сигналы “ТИИ1-1”, “ТИИ1-0”,... “ТИИ31-1”, “ТИИ31-0” датчиков ТИИ с параметрами:
длительность “ИМПУЛЬСА” Тимп не менее 8 мс;
длительность “ПАУЗЫ” Тп не менее 8 мс;
частота следования импульсов 1/(Тимп + Тп) не более 25 Гц;
скважность следования импульсов (Тимп + Тп)/Тимп не менее 4 (при полной загрузке входов модуля);
ток через датчик в “ИМПУЛЬСЕ” Iимп не менее 8 мА при U=12 В и сопротивлении цепи 1 кОм;
ток через датчик в “ПАУЗЕ” Iп не более 1 мА при U=12 В и сопротивлении цепи 1 кОм.
Выходным неинтерфейсным сигналом модуля МВИС-3 является выход гальванически изолированного источника постоянного тока напряжением 12 В, предназначенный для питания датчиков ТИИ.
Входными и выходными интерфейсными сигналами модуля МВИС-3 являются сигналы ММИ:
D0...D7 сигналы данных;
ВМ4 выбор модуля;
WR сигнал синхронизации записи данных;
RD сигнал синхронизации чтения данных.
Уровни сигналов данной группы соответствуют: высокий уровень - от 3,5 до 5,5 В; низкий уровень - от 0 до 0,8 В.
Импульсы с датчиков ТИИ поступают на входной преобразователь ВП. Входные каналы модуля сгруппированы во входном преобразователе в 4 группы по 8 каналов. Информация о состоянии сигналов групп последовательно выбирается через групповой ключ ГК и считывается контроллером К. Период сканирования входов, равный 2,5 мс, позволяет контроллеру К устранять дребезг сигналов. Подавление дребезга производится многократным подтверждением изменившегося состояния датчика. Емкость канального счетчика ТИИ, организованного в памяти К модуля, - 255 импульсов .
Для повышения устойчивости модуля к внешним электромагнитным помехам предусмотрен тайм-сторож, который выполняет рестарт процессора в случае его “зависания”. При рестарте процессора накопленная информация счетчиков теряется.
При обращении к МВИС-3 процессор КУКП записывает в модуль код номера выбранного канала Nкан, устанавливая на шине данных D0...D7 код Nкан и сопровождая его состоянием сигналов ВМ4=0 и WR=0. Это состояние вызывает прерывание выполнения основной программы контроллера К по сканированию входов. При выполнении процедуры прерывания контроллер К считывает Nкан через шинный формирователь (D5) и собственный порт Р1, записывает содержимое счетчика канала Nкан в порт Р1 и обнуляет его (счетчик Nкан). При установленных уровнях сигналов ВМ4=0 и RD=0 процессор КУКП считывает значение счетчика выбранного канала Nкан и переходит к обслуживанию следующего канала. Все каналы модуля обслуживаются контроллером КУКП последовательно: от 1 до 32-го. В байте данных, соответствующем 32-му каналу модуль выдает контроллеру КУКП служебную информацию. Диаграмма сигналов обмена контроллера КУКП с модулем МВИС-3 представлена на рис.30.
Габаритные размеры модуля МВИС-3 не превышают 30х255х260 мм. Масса модуля МВИС-3 не превышает 0,5 кг.
Питание модуля МВИС-3 обеспечивается от блока питания БПКП.М постоянным током напряжением 27 В. Ток, потребляемый модулем от блока питания, не превышает 0,2 А. Получаемое от БПКП.М напряжение ИП преобразует в ряд напряжений для собственных нужд:
а) стабилизированное напряжение 5 В для питания функциональной части модуля (основной канал источника);
б) стабилизированное напряжение 12 В для питания гальванически изолированных цепей датчиков ТИИ.

Рис.30 . Диаграмма сигналов обмена контроллера КУКП с модулем МВИС-3
Индикаторы модуля:
- «5V» – засвечивается после завершения инициализации процессора и проверки ресурсов модуля. Гаснет при пропадании питания 5 В схемы модуля или при обнаружении процессором неисправности модуля;
- «РБТ» – светится при наличии напряжения 12 В для питания датчиков.
Устройство и работа КТМС-М2
КТМС-М2 предназначен для связи с устройством пункта управления и обработки данных.
КТМС-М2 обеспечивает выполнение следующих функций:
- ввод и демодуляцию сигналов ТЧ от УПУ;
- декодирование и достоверизацию сообщений УПУ;
- передачу команд/запросов контроллеру КУКП;
- прием информационного кадра от контроллера КУКП;
- контроль изменений состояний сигналов ТС;
- ведение 32-хразрядных программных счетчиков каналов ТИИ устройства в энергонезависимой памяти;
- допусковый контроль значений ТИТ по введенным уставкам в энергонезависимую память;
- сглаживание значений ТИТ по установленному в энергонезависимой памяти коэффициенту Ксгл;
- формирование и кодирование ответных сообщений в адрес УПУ;
- двухчастотную модуляцию выдаваемых сообщений УПУ;
- управление оконечным устройством передачи данных: канальными разветвителями, режимом работы радиостанции;
- ведение и синхронизацию часов астрономического времени;
- регистрация событий по каналам ТС, ТУ, диагностике устройства в астрономическом времени;
- периодическая регистрация срезов значений по каналам ТИТ и ТИИ устройства;
- прием от адаптеров ТА-2 и ТА-3 команд обслуживания и их исполнение.
КТМС-М2 конструктивно выполнен в виде закрытого модуля с габаритными размерами 30х255х260 мм.
Масса КТМС-М2 не превышает 0,5 кг.
Питание КТМС-М2 осуществляется от блока питания БПКП.М напряжением 27 В постоянного тока. Мощность, потребляемая КТМС-М2 от БПКП.М, не превышает 4,5 Вт.
Входными и выходными неинтерфейсными сигналами контроллера КТМС-М2 являются сигналы:
ПРМ (-1 и -2) входной сигнал ТЧ;
ПРД (-1 и -2) выходной сигнал ТЧ;
SD выходной сигнал управления внешним устройством;
DOUT выходной сигнал управления внешним устройством;
АДР0...АДР4 входные дискретные сигналы задания адреса устройства на канале ТЧ.
Входными и выходными интерфейсными сигналами контроллера КТМС являются сигналы ММИ:
- D0...D7 двунаправленные сигналы данных;
- КТМС входной сигнал синхронизации данных при обмене между КУКП и КТМС;
- ОТВЕТ выходной сигнал синхронизации данных при обмене между КУКП и КТМС;
- RESET входной сигнал начальной установки устройства, формируемый контроллером КУКП.
Уровни сигналов данной группы соответствуют: высокий уровень - от 2,4 до 5,5 В; низкий уровень - от 0 до 0,8 В.
Схема структурная КТМС-М2 приведена на рис.31. Схема электрическая принципиальная модуля КТМС-М2 приведена в приложении 1. Контроллер состоит из следующих основных узлов (в скобках приведено позиционное обозначение элементов на схеме электрической принципиальной контроллера редакции от 21.06.95г.):
Блок процессорный (ПБ):
- ЦП центральный процессор контроллера (2D3);
- РА регистр адреса (2D5);
- ПЗУ постоянное запоминающее устройство (2D6);
- ОЗУ оперативное запоминающее устройство (2D7);
- СВ супервизор питания процессора (2D9);
- ПВВ порт ввода-вывода (2D8);
- ЛУ линейный узел цепей управления радиостанцией/разветвителем устройством (2VT2, 2VT3, 2VE1, 2VE2)
Модем:
Модулятор сигнала ТЧ:
- ДЧ делитель частоты 1/240 (3D5, 3D11, 3D2.2, 3D17);
- ТД1 триггер данных передачи; предназначен для фиксации передаваемого бита (3D20.1);
- ТП1 триггер прерывания по передаче информации; предназначен для выдачи на ПБ сигнала RST6, вызывающего обновление на линии DOUT передаваемого бита (3D16.2);
- НП1 наборное поле; предназначено для установки (перемычками) значений управляющих кодов К1 и К0 (3X3, 3X4);
- УДЧ1 управляемый делитель частоты; предназначен для двухчастотной модуляции кодовой последовательности (3D3, 3D9, 3D15, 3D13);
- У1 буферный усилитель; осуществляет усиление сигнала и индикацию передачи модулированного сигнала (3VT5, 3VD7, 3R15);
- ПФ1 полосовой фильтр; предназначен для ограничения спектра выходного сигнала (3D19, 3D24, 3R20, 3R23...3R25, 3R31... 3R35, 3R38, 3R39, 3C17...3C23);
- У2 линейный усилитель; предназначен для усиления передаваемого сигнала ТЧ (3D24, 3VT8...3VT11, 3R35, 3R39, 3R42...3R45);
- УС1 узел согласования передатчика с линией связи; предназначен для согласования физических параметров усилителя У2 с линией связи (3R44, 3R45, 3TV2);
Демодулятор сигнала ТЧ:
- УС2 узел согласования приемника с линией связи; предназначен для согласования физических параметров приемника с линией связи и защиты от перенапряжений (3TV1, 3R2, 3R4, 3R6, 3VD5, 3VD6);
- ПФ2 полосовой фильтр; служит для селекции рабочих частот из спектра входного сигнала (3D4, 3D7, 3D10);
- СВПС схема выделения периодов сигналов; предназначена для формирования импульсов в точках перехода через нуль входного сигнала (3D14, 3D18, 3VT4, 3D22, 3D13.3, 3D2.4);
- УДЧ2 управляемый делитель частоты 1/N (3D25, 3D28, 3D13.4);
- НП2 наборное поле; предназначено для установки (перемычками) значения средней (опорной) частоты приема (3Х8);
- ШК широтный компаратор; предназначен для сравнения периодов входного сигнала относительно опорного сигнала (средней) частоты (3D31.4);
- ДЛС детектор несущей линейного сигнала; предназначен для запуска демодулятора при обнаружении несущей линейного сигнала (3D21, 3D20.2, 3VT12);
- НП3 наборное поле; предназначено для установки (перемычками) кода N минимальной длины “лидера” (3X6);
- СПС схема побитной синхронизации; служит для синхронизации принимаемой из ЛС информации (3D26.1, 3D23.1, 3D23.2, 3D26.1, 3D6.2, 3D8.1, 3D8.2, 3D12, 3D27.1);
- ТД2 триггер данных приёма; предназначен для фиксации принимаемого бита (3D26.2);
- ТП2 триггер прерывания по приему информации; предназначен для выдачи на ПБ сигнала RST5, вызывающего прием ПБ состояния сигнала с линии DIN (3D27.2);
Рис.31 . Схема структурная КТМС-М2
Режим модуляции данных и передачи сигнала ТЧ в линию связи
Режим модуляции данных и передачи сигнала ТЧ определяется состоянием ENPRD=1, при котором разрешается работа модулятора.
Синхроимпульсы с выхода ДЧ частотой 2,4 кГц поступают на входы синхронизации триггеров ТД1 и ТП1. Триггер ТД1 по фронту синхроимпульса с ДЧ фиксирует уровень сигнала передаваемой информации по цепи DOUT. Дискретная информация (1/0) с выхода ТД1 поступает на НП1 и, в качестве управляющих кодов К1 и К0, - на управляемый делитель частоты УДЧ1. УДЧ1 под управлением кодов К1 и К0 осуществляет генерацию меандра частотой F1 или F0, соответственно. Меандр через буферный усилитель У1 поступает на ФНЧ. Передача сигнала сопровождается свечением индикатора “ПРД”, выведенного на лицевую панель контроллера. Основная гармоника модулированного сигнала выделяется ПФ1. Шлиц подстроечного резистора 3R18 выведен на лицевую панель и позволяет регулировать уровень выходного сигнала. Контроль уровня выходного сигнала ТЧ можно производить вольтметром или осциллографом, подключившись к гнездам XS1 (сигнал) и XS3 (общий). Через УС и УС1 сигнал ТЧ выдается в линию связи по цепям “ПРД”.
Выходной сигнал триггера ТП1 вызывает прерывание RST6 ПБ. По прерыванию RST6 ПБ обновляет на линии DOUT передаваемую информацию и сбрасывает триггер ТП1 по цепи RESPRD.
Значения кодов К1 и К0 устанавливаются монтажом перемычек на НП1. Дискретность установки кодов К1 и К0 позволяет устанавливать любые значения частот F1 и F0 из табл.4. Нестабильность установленных значений частот не превышает 1 Гц. Порядок установки значений кодов К1 и К0 изложен в разделе “ПОДГОТОВКА К РАБОТЕ”.
Таблица 4
Значения характеристических частот передачи, Гц | |||||||
1107,7 | 1210,1 | 1333,3 | 1484,5 | 1674,4 | 1920,0 | 2250,0 | 2717,0 |
1116,3 | 1220,3 | 1345,8 | 1500,0 | 1694,1 | 1945,9 | 2285,7 | 2769,2 |
1125,0 | 1230,8 | 1358,5 | 1515,8 | 1714,3 | 1972,6 | 2322,6 | 2823,5 |
1133,9 | 1241,4 | 1371,4 | 1531,9 | 1734,9 | 2000,0 | 2360,7 | 2880,0 |
1142,9 | 1252,2 | 1384,6 | 1548,4 | 1756,1 | 2028,2 | 2400,0 | 2938,8 |
1152,0 | 1263,2 | 1398,1 | 1565,2 | 1777,8 | 2057,1 | 2440,7 | 3000,0 |
1161,3 | 1274,3 | 1411,8 | 1582,4 | 1800,0 | 2087,0 | 2482,8 | 3063,8 |
1170,7 | 1285,7 | 1425,7 | 1600,0 | 1822,8 | 2117,6 | 2526,3 | 3130,4 |
1180,3 | 1297,3 | 1440,0 | 1618,0 | 1846,2 | 2149,3 | 2571,4 | 3200,0 |
1190,1 | 1309,1 | 1454,5 | 1636,4 | 1870,1 | 2181,8 | 2618,2 | 3272,7 |
1200,0 | 1321,1 | 1469,4 | 1655,2 | 1894,7 | 2215,4 | 2666,7 | 3348,8 |
Режим приема сигнала ТЧ из линии связи и его демодуляции
Входной сигнал из линии связи по цепям “ПРМ” через УС2 поступает на вход ПФ2, который ослабляет амплитуды сигналов, значения частот которых расположены за пределами полосы пропускания ПФ. С выхода ПФ сигнал выделенного спектра поступает на схему СВПС, которая формирует сигнал F1/F2 частотой входного сигнала. Сигнал F1/F2 поступает на один из входов широтного компаратора ШК. На другой вход ШК подается опорная частота Fср. Для установки Fср на УДЧ2 подается значение N, определяемое пользователем перемычками на наборном поле НП2. На выходе ШК формируется дискретный сигнал 1/0, определяющий знак разности сравниваемых частот сигналов Fср и F1/F2. Этот признак поступает на D-вход триггера ТД2 и на схему СПС. При разрешающем (низком) уровне сигнала SYN2 cхема СПС обеспечивает выдачу меток синхронизации принимаемых данных: первая метка выдается через 208 мкс после обнаружения высокого уровня сигнала 1/0, последующие метки выдаются с интервалом 416 мкс. Метки синхронизации подаются на синхронизирующие входы триггеров ТД2 и ТП2.
На разрешающие входы триггеров ТД2 и ТП2 подается сигнал Е с выхода детектора ДЛС. Сигнал Е=0 (разрешение работы триггеров) вырабатывается схемой ДЛС в том случае, когда она обнаружит непрерывную последовательность L периодов входного сигнала частотой F0. Значение L устанавливается пользователем перемычками на наборном поле НП3 из ряда: 4, 8, 16, 32, 64. Величина L должна быть меньше количества периодов несущей частоты “лидера” принимаемой посылки.
Триггер ТП2 по меткам синхронизации вырабатывает сигнал RST5, по которому ПБ считывает состояние цепи DIN, осуществляя прием данных и сброс триггера ТП2 по цепи RESPRM.
Функционирование ПБ
Алгоритм функционирования ПБ контроллера КТМС-М2 в общем виде приведен на рис.32, 33.

Рис.32 . Блок-схема алгоритма работы ПБ контроллера КТМС-М2 (продолжение на следующей странице)
Рис.33 . Окончание блок-схемы алгоритма работы ПБ контроллера КТМС-М2
Сглаживание значений ТИТ производится согласно выражению:
Uвых =Uтек+(256-Kсгл)(Uвх-Uтек)/256, где
Uвых - выходное (сглаженное) значение;
Uтек - текущее значение, вычисленное в предыдущем цикле;
Ксгл - коэффициент сглаживания выбросов выходных значений, устанавливается пользователем для каждого из каналов ТИТ индивидуально в интервале от 0 до 255 (значению 0 соответствует отсутствие сглаживания);
Uвх - входное (фактически измеренное) значение.
На рис.34 представлен график выхода значения ТИТ при единичном выбросе (скачке) измеряемого напряжения и Ксгл=128. По графику видно, что характер сглаживания скачков значений - экспоненциальный.

Рис.34 . График нарастания выходного значения ТИТ при единичном выбросе и Ксгл=128
Алгоритм обработки значений ТИТ обеспечивает допусковый контроль значений ТИТ по таблице уставок. Значения уставок передаются устройству УКПМ по каналу ТЧ от УПУ. Для каждого из каналов ТИТ назначаются шесть статических и две динамические уставки. Наименования уставок приведены в табл.5.
№ п/п | Наименование уставки | Сокращенное обозначение уставки |
1 | Верхняя уставка предаварийных значений | ВПУ |
2 | Нижняя уставка предаварийных значений | НПУ |
3 | Верхняя уставка аварийных значений | ВАУ |
4 | Нижняя уставка аварийных значений | НАУ |
5 | Верхняя уставка недостоверных значений | ВДУ |
6 | Нижняя уставка недостоверных значений | НДУ |
7 | Уставка аварийной скорости изменения значений | УСА |
8 | Уставка предаварийной скорости изменения значений | УСП |
На рис.35 обозначены статические зоны контроля параметра и положения уставок зон контроля.
Рис.35 . Статические зоны контроля значений параметров ТИТ
Статические уставки ограничивают с внутренней стороны статические зоны контроля значений параметров ТИТ:
- зона нормальных значений;
- верхняя и нижняя зоны предаварийных значений;
- верхняя и нижняя зоны аварийных значений;
- верхняя и нижняя зоны недостоверных значений.
При переходе значения контролируемого параметра А(t) из одной контрольной зоны в другую устанавливается или сбрасывается флаг соответствующей уставки допускового контроля ТИТ (точки t1...t5 на рис.35).
Для исключения “дребезга” флагов статического контроля пользователь может ввести беззнаковое значение гистерезиса g, одинакового для всех уставок одного канала ТИТ. Величина гистерезиса определяет зону нечувствительности к изменениям контролируемого параметра. Распространение зон гистерезиса осуществляется от одной ординаты уставки в сторону другой. Динамический диапазон установки значений гистерезиса g равен 255 единиц младшего разряда АЦП. На рис.36 представлена дискретная функция А(t). Период дискретизации функции А(t) соответствует времени основного цикла устройства Тцикл. В точке t1 устанавливается, а в точке t2 сбрасывается флаг НУ. В точках t3 и t5 устанавливается, а в точке t4 сбрасывается флаг ВУ.

Рис.36 . Гистерезис уставок статического контроля
По функции ОТ (в отношении каналов ТИТ) обслуживаются события допускового контроля значений ТИТ. Событием допускового контроля ТИТ считается установка флага соответствующей уставки статического контроля (точки t1, t3, t5 на рис.36). Сброс флага уставки статического контроля не является событием. Если в промежутке между установкой и сбросом одного флага уставки статического контроля устройство не будет обслужено по функции ОТ, факт выхода за пределы уставки будет утерян. Потеря события при неуспешном обмене по каналу ТЧ исключена.
Динамические уставки скорости изменения значения ТИТ (УСП - предаварийная и УСА - аварийная) определяют предельное приращение значения Аi контролируемого параметра в течение времени Тцикл основного внутреннего цикла устройства. Если значение Аi превысит установленное значение УСП или УСА, устанавливается соответствующий флаг динамической уставки. На действие динамического контроля не оказывает влияние коэффициент Ксгл сглаживания выбросов, поскольку контролируются значения самих выбросов. Флаг динамической уставки, в отличие от флагов статических уставок, сбрасывается после успешного завершения передачи события на ПУ. Совместно с флагом превышения скоростной уставки в адрес ПУ отправляется сглаженное значение ТИТ по данному каналу.
На рис.37 показаны параметры динамического контроля скорости изменения значений ТИТ. Если, например, значение А1 превышает значение УСП или УСА, то в точке t1 (по окончании текущего цикла) устройство установит флаг соответствующей уставки.

Рис.37 . Параметры динамического контроля значений ТИТ
Работа контроллера с радиостанцией
Контроллер КТМС-М2 обеспечивает работу с радиостанцией, имеющей вход для подключения микротелефонной трубки (МТТ) и цепи внешнего управления режимом ПРИЕМ/ПЕРЕДАЧА.
При работе с радиостанцией контроллер подключается параллельно МТТ:
1) выход передатчика подключается параллельно микрофону;
2) вход приемника - параллельно телефонному капсюлю;
3) цепи сигналов управления радиостанцией подключаются к соответствующим контактам разъема ЛИНИЯ контроллера КТМС-М2.
При работе с радиостанцией контроллер обеспечивает выдачу сигнала управления режимом ПРИЁМ/ПЕРЕДАЧА. Сигнал выдается между цепями SD и GND. Схема подключения цепей SD и GND для выдачи сигнала управления радиостанцией представлена на рис.38.
Рис.38 . Схема подключения цепей SD и GND для контроля сигнала управления радиостанцией
Временная диаграмма сигнала SD управления радиостанцией приведена на рис.39.
Рис.39 . Временная диаграмма выдачи сигнала управления радиостанцией
При работе с радиостанцией типа "ЭСТАКАДА-IP" возможно подключение цепей КТМС-М2 непосредственно к блоку приемопередатчика радиостанции (разъем “НЧ”). Пример схемы подключения КТМС-М2 к блоку “ПРИЕМОПЕРЕДАТЧИК” радиостанции типа "ЭСТАКАДА-IP" приведена на рис.40. Этот вариант схемы исключает возможность ведения служебных переговоров через разговорный тракт радиостанции.

Рис.40 . Пример схемы подключения контроллера КТМС-М2 к блоку "ПРИЕМОПЕРЕДАТЧИК" радиостанции типа 18Р22С "Эстакада-1Р"
Другой вариант схемы подключения контроллера типа КТМС-М2 к радиостанции типа 18Р22С "Эстакада-1Р", приведенный на рис.41, обеспечивает в положении “2” ключа S возможность ведения служебных переговоров. Обмен устройства с пунктом управления в положении “2” ключа S исключен. После окончания переговоров переключатель S должен быть установлен в положение “1”.

Рис.41 . Вариант схемы подключения контроллера КТМС-М2 к радиостанции типа 18Р22С "Эстакада-1Р"
При работе через радиостанцию необходимо учитывать время установления параметров радиостанции после подачи на нее управляющего сигнала. Это время можно компенсировать увеличением длины “лидера” передаваемых устройством посылок. Для радиостанции типа 18Р22С "Эстакада-1Р" рекомендуется устанавливать длину “лидера” не менее 30 мс, а параметр L (параметр схемы контроля несущей) равным 32.
Работа контроллера с канальными разветвителями типа РК-4
При работе с разветвителем типа РК-4 контроллер перед посылкой сигнала ТЧ выдает сигналы управления разветвителем в одном из четырех вариантов. Варианты алгоритмов управления РК-4 приведены в табл.6. На рис.42 представлена схема контроля сигналов управления разветвителем типа РК-4.
Таблица 6
Режим резервирования линии связи | Вариант формирования сигналов управления | Прием по каналам РК-4 | Передача по каналам РК-4 | Временная | ||
основной | резервный | основной | резервный | |||
без резервирования | Вариант 1 | да | - | да | - | рис.43 |
с резервированием | Вариант 2 | - | да | да | - | рис.44 |
Вариант 3 | да | - | да | да | рис.45 | |
Вариант 4 | - | да | да | да | рис.46 | |

Рис.42 . Схема контроля сигналов управления разветвителем РК-4

Рис.43 . Временная диаграмма сигналов управления разветвителем РК-4 в варианте 1

Рис.44 . Временная диаграмма сигналов управления разветвителем РК-4 в варианте 2

Рис.45 . Временная диаграмма сигналов управления разветвителем РК-4 в варианте 3
Рис.46 . Временная диаграмма сигналов управления разветвителем РК-4 в варианте 4
Для работы с разветвителем типа РК-4 контроллеру задается режим: с резервированием или без резервирования линии связи канала ТЧ. В режиме без резервирования линии связи контроллер обеспечивает выдачу на РК-4 в каждом сеансе связи сигналов управления в варианте 1. В режиме с резервированием контроллер переключается на резервную линию связи, если в течение установленного пользователем времени Трез не принимает корректных сообщений от УПУ.
Описание модуля блока питания устройства БПКП.М
БПКП.М предназначен для питания модулей и контроллеров КПМ постоянным током напряжением 27 В±10%.
Первичное питание БПКП.М (устройства) осуществляется от основного источника однофазной сети переменного тока напряжением (220+33-44) В и частотой (50+-2,5) Гц или от резервного источника постоянного тока напряжением (24...27) В.
Мощность, потребляемая БПКП.М от основного или резервного источника, не превышает 30 ВА при номинальной нагрузке.
Номинальное значение выходного напряжения БПКП.М - 27 В.
БПКП.М обеспечивает работу в диапазоне значений тока нагрузки от 0,3 до 1,0 А.
Суммарная нестабильность выходного напряжения, вызванная изменением величины входного напряжения в пределах допустимых значений, частоты питающего сетевого напряжения в пределах допустимых значений, тока нагрузки и температуры в допустимых пределах не превышает 5 %.
Сопротивление изоляции, измеренное между входными клеммами "~220V" и выходными цепями БПКП.М при нормальных климатических условиях, не менее 20 МОм.
Габаритные размеры БПКП.М не более 65х255х260 мм.
Масса БПКП.М не превышает 1,3 кг.
Функционирование БПКП.М
БПКП.М состоит из сетевого фильтра, выпрямителя, конвертора, схемы управления конвертором и устройства включения резервного питания. Схема электрическая принципиальная БПКП.М приведена в приложении 1. Ниже приводится описание БПКП.М редакции от 19.06.95г.
Сетевой фильтр состоит из конденсаторов C1...C6, дроcселя L1 и используется для снижения уровня индустриальных радиопомех в цепях первичного питания, а также излучаемых самим устройством импульсных помех в сеть.
Для защиты питающих вводов предусмотрены предохранители FU1...FU3, установленные на плате. Сетевое напряжение 220 В с сетевого фильтра поступает на выпрямитель, выполненный на диодах VD2...VD5 и конденсаторах фильтра C7 и C8.
Выпрямленное сетевое напряжение поступает на конвертор, выполненный на транзисторах VT2, VT3, диодах VD9, VD10, VD12, VD13, резисторах R9...R12, конденсаторах C10...C13 и трансформаторе TV1.
Конвертор выполнен по схеме с обратным включением силового диода VD13 во вторичной обмотке. После подачи напряжения на конвертор транзистор VT3 открывается током через цепочку R9, R10 и ток IVT3k (через обмотку I трансформатора и коллектор транзистора VT3) растет, вызывая нарастание магнитного потока в магнитопроводе трансформатора (рис.47). ЭДС положительной обратной связи обмотки III способствует лавинообразному открыванию транзистора VT3. Полярность ЭДС обмотки II в период Ti такова, что диод VD13 закрыт и нагрузка блока питается током разряда конденсаторов фильтра C14...C16. Происходит запасание магнитной энергии в магнитопроводе трансформатора. Ток IVT3k нарастает до тех пор, пока падение напряжения на резисторе R12 через конденсатор C11 не откроет транзистор VT2. В этот момент VT3 прикрывается и ток IVT3k резко уменьшается.
Рис.47 . Форма тока коллектора транзистора VT3. Здесь Ti и Tp- длительность импульса и паузы соответственно
Нарастание магнитного потока в трансформаторе прекращается, полярность ЭДС на обмотках трансформатора меняется на обратную и происходит лавинообразный процесс запирания транзистора VT3. Диод VD12 служит для форсирования процесса запирания транзистора VD5. Конденсатор C11 разряжается через диоды VD9, VD10 и резистор R12. Полярность ЭДС обмотки II трансформатора в период Tp такова, что диод VD13 открыт и запасенная в магнитопроводе энергия передается в нагрузку и на заряд емкостей фильтра C14...C16 (рис.48). Дроссели фильтра L2, L3 сглаживает короткие выбросы выходного напряжения блока.

Рис.48 . Форма напряжения на обмотке II трансформатора TV1. Здесь Ti и Tp- длительность импульса и паузы соответственно
Схема управления конвертором выполнена на транзисторе VT1, диоде VD11, стабилитроне VD8, резисторах R5...R8 и конденсаторе C9. ЭДС обмотки IV трансформатора пропорциональна ЭДС выходной обмотки. Часть напряжения на конденсаторе C9, пропорциональная ЭДС обмотки II трансформатора, сравнивается с опорным напряжением на стабилитроне VD8 и разность напряжений определяет значение тока коллектора транзистора VT1 и, следовательно, момент открывания транзистора VT2. Таким образом обеспечивается частичная стабилизация выходного напряжения БПКП.М от колебаний тока нагрузки.
Устройство беспрерывного переключения на источник резервного питания служит для обеспечения непрерывного функционирования УКПМ при пропадании сетевого напряжения основного источника и выполнено на диодах VD6, VD7 и резисторе R6.
Напряжение резервного источника питания подается на устройство с контактов 4А, 3Б разъема X1 через предохранитель FU1 и тумблер S2.
Индикация наличия резервного питания, целостности предохранителя и включения тумблера, производится индикатором VD1. Диод VD6 предохраняет светодиод VD1 от повреждения при ошибочной смене полярности резервного питания.
Во всех контроллерах и модулях блока КПМ используются типовые схемы источников вторичного электропитания - исполнения преобразователя. Преобразователь выполнен по схеме двухтактного преобразователя мощности с независимым возбуждением. В зависимости от исполнения на выходе преобразователя реализуются гальванически изолированные каналы источников 5В, ±12В, ±15В, 27В.
Схема электрическая принципиальная преобразователя приведена в приложении 2. Преобразователь состоит из следующих основных узлов (в скобках приведено позиционное обозначение элементов на схеме электрической принципиальной преобразователя):
- Г генератор импульсов (D1.1, D1.2, R2, C6);
- ФСУ формирователь сигналов управления ключами (D2.1, D2.1, D3.1, D1.3, D1.4, D3.2, D3.3, R3...R7, C7);
- БК блок ключей (VT1...VT4);
- ВС выходные стабилизаторы (A1...A7).
Частота генерации генератора Г около 30 кГц. Фазовые соотношения управляющих сигналов основных ключей VT1 и VT2 исключают сквозной ток через них при переключениях. Транзисторы VT1 и VT2 обеспечивают форсированное рассасывание заряда базы основных ключей, что обеспечивает снижение потерь мощности при закрывании ключей.
Устройство блоков БКСБлоки БКС предназначены для монтажа цепей датчиков на объекте. Блоки БКС выпускаются по исполнениям, отличающимся по типам установленных клеммников. Клеммник представляет собой функционально законченную конструкцию и состоит из следующих основных частей:
- розетка разъема для подключения к контроллеру или модулю блока КПМ;
- жгут соединительный;
- две клеммные колодки, обеспечивающие монтаж проводников сечением жил до 2,5 мм2.
Клеммники выпускаются трех исполнений:
КЛТС - клеммник цепей датчиков ТС;
КЛТИТ - клеммник цепей датчиков ТИТ;
КЛТИИ2 (КЛТИИ) - клеммник цепей датчиков ТИИ.
Внешне все исполнения блоков БКС одинаковы и выполнены в виде блока с закрывающейся крышкой. Доступ к клеммным колодкам обеспечивается после снятия крышки БКС. Ввод контрольных кабелей осуществляется с нижней и/или боковых сторон. В крышке БКС для ввода кабелей имеются вырезы. Для закрепления введенных кабелей со стороны ввода предусмотрены зажимы. Вывод соединительных жгутов клеммников осуществляется через вырезы в верхней части крышки.
Чертеж общего вида блоков БКС приведен на рис.49. Предполагается установка блоков БКС на вертикальной монтажной плоскости в положении, приведенном на рис.49. В табл.7 приведены исполнения блоков БКС.
| По позициям на рис.49 | |
Исполнение БКС | 1 | 2 |
| установлены клеммники | |
БКС-1 | КЛТИТ | КЛТИИ2 (КЛТИИ) |
БКС-2 | - | КЛТС |
БКС-3 | КЛТИТ | КЛТС |
БКС-4 | КЛТС | КЛТС |
БКС-5 | КЛТИТ | - |

Рис.49 . Чертеж общего вида блоков БКС
Таблица назначений контактов колодок клеммника КЛТИТ приведена в табл.8. Схема электрическая принципиальная КЛТИТ приведена в приложении 4.
№ канала ТИТ | Контакт | № канала ТИТ | Контакт | ||||
п/п | группа /объект | + | - | п/п | группа /объект | + | - |
1/1 | X2-02 | X2-04 | 3/1 | X2-17 | X2-19 | ||
1/2 | X2-06 | X2-08 | 3/2 | X2-21 | X2-23 | ||
1/3 | X2-10 | X2-12 | 3/3 | X2-25 | X2-27 | ||
1/4 | X2-14 | X2-16 | 3/4 | X2-29 | X2-31 | ||
1/5 | X2-18 | X2-20 | 3/5 | X2-33 | X2-35 | ||
1/6 | X2-22 | X2-24 | 3/6 | X2-37 | X2-39 | ||
1/7 | X2-26 | X2-28 | 3/7 | X2-41 | X2-43 | ||
1/8 | X2-30 | X2-32 | 3/8 | X2-45 | X2-47 | ||
2/1 | X2-34 | X2-36 | 4/1 | X3-02 | X3-04 | ||
2/2 | X2-38 | X2-40 | 4/2 | X3-06 | X3-08 | ||
2/3 | X2-42 | X2-44 | 4/3 | X3-10 | X3-12 | ||
2/4 | X2-46 | X2-48 | 4/4 | X3-14 | X3-16 | ||
2/5 | X2-01 | X2-03 | 4/5 | X3-18 | X3-20 | ||
2/6 | X2-05 | X2-07 | 4/6 | X3-22 | X3-24 | ||
2/7 | X2-09 | X2-11 | 4/7* | X3-26 | X3-28 | ||
2/8 | X2-13 | X2-15 | 4/8* | X3-30 | X3-32 | ||
Расположение колодок клеммника КЛТИТ представлено на рис.50. На клеммных колодках клеммника КЛТИТ (между контактами “+” и “-” согласно табл.8) размещены токовые шунты для исполнения подканалов ТИТ “минус 20...плюс 20 мА”.
- Токовые шунты 5 мА размещены в контроллере КУКП-3. При замене контроллера КУКП-2 на контроллер типа КУКП-3 токовые шунты 5 мА с клеммника КЛТИТ должны быть демонтированы. При замене контроллеров типа КУКП-2, КУКП и КУКП-М на КУКП-3 перемонтажа цепей датчиков не требуется.
Схема подключения датчиков ТИТ к клеммнику КЛТИТ приведена на рис.50а.

Рис.50 . Схема расположения колодок клеммника КЛТИТ

Рис.50а. Схема подключения датчиков ТИТ к клеммнику КЛТИТ.
Примечание. Каналы 4/7 и 4/8 являются расширением числа каналов ТИТ устройства и могут быть использованы потребителем наравне с остальными каналами
* Каналы 4/7 и 4/8 являются расширением числа каналов ТИТ устройства, оснащенного контроллером КУКП-3, и могут быть использованы потребителем наравне с остальными каналами
Таблица назначений контактов клеммных колодок клеммников КЛТИИ и КЛТИИ2 приведена в табл.9. Схемы электрические принципиальные КЛТИИ и КЛТИИ2 приведены в приложении 4.
№ канала ТИИ | Контакт | № канала ТИИ | Контакт | ||||
п/п | группа /объект | + | - | п/п | группа /объект | + | - |
1/1 | X2-01 | X2-03 | 3/1 | X3-18 | X3-20 | ||
1/2 | X2-05 | X2-07 | 3/2 | X3-22 | X3-24 | ||
1/3 | X2-09 | X2-11 | 3/3 | X3-26 | X3-28 | ||
1/4 | X2-13 | X2-15 | 3/4 | X3-30 | X3-32 | ||
1/5 | X2-17 | X2-19 | 3/5 | X3-34 | X3-36 | ||
1/6 | X2-21 | X2-23 | 3/6 | X3-38 | X3-40 | ||
1/7 | X2-25 | X2-27 | 3/7 | X3-42 | X3-44 | ||
1/8 | X2-29 | X2-31 | 3/8 | X3-46 | X3-48 | ||
2/1 | X2-33 | X2-35 | 4/1 | X3-01 | X3-03 | ||
2/2 | X2-37 | X2-39 | 4/2 | X3-05 | X3-07 | ||
2/3 | X2-41 | X2-43 | 4/3 | X3-09 | X3-11 | ||
2/4 | X2-45 | X2-47 | 4/4 | X3-13 | X3-15 | ||
2/5 | X3-02 | X3-04 | 4/5 | X3-17 | X3-19 | ||
2/6 | X3-06 | X3-08 | 4/6 | X3-21 | X3-23 | ||
2/7 | X3-10 | X3-12 | 4/7 | X3-25 | X3-27 | ||
2/8 | X3-14 | X3-16 | 12В * |
| X3-45* | X3-47* | |
Расположение колодок клеммников КЛТИИ и КЛТИИ2 приведено на рис.51. На рис.52 приведены схемы подключения датчиков к клеммникам КЛТИИ и КЛТИИ2.

Рис.51 . Схема расположения колодок клеммников КЛТИИ и КЛТИИ2

Рис.52 . Схема подключения датчиков к клеммникам КЛТИИ и КЛТИИ2
* только для клеммника типа КЛТИИ
Таблица назначений контактов клеммных колодок клеммника КЛТС приведена в табл.10. Схема электрическая принципиальная КЛТС приведена в приложении 4.
Расположение колодок клеммника КЛТС приведено на рис.53. В состав клеммника КЛТС входят две съемные платы, содержащие развязывающие диоды и ограничительные резисторы. Для защиты от повреждающих помех общий вывод источника питания датчиков ТС соединен с основанием блока БКС. При монтаже основание БКС должно быть соединено с контуром заземления. Схема подключения датчиков ТС к КЛТС приведена на рис.54.

Рис.53 . Схема расположения клеммных колодок клеммника КЛТС
Рис.54 . Схема подключения датчиков ТС к клеммнику КЛТC
Электрические цепи, между которыми измеряется электрическое сопротивление | Значение электрического сопротивления в рабочих условиях эксплуатации, МОм, не менее |
1 Закороченные между собой контакты 1А и 1Б разъема питания блока КПМ | 1 |
1 Закороченные между собой контакты 1А и 1Б разъема питания блока КПМ | |
1 Закороченные между собой контакты внешних подключений блока КПМ | |
1 Закороченные между собой контакты клеммников БКС |
Общие параметры устройства:
- физический адрес устройства для обмена с пунктом управления;
- скорость обмена сообщениями с пунктом управления;
- характеристические частоты передачи: F1 и F0;
- средняя (опорная) частота демодулятора Fср;
- краевые частоты полосы пропускания полосового фильтра приемника сигнала ТЧ;
- параметр L, определяющий число периодов частоты F0 для обнаружения несущей;
- длина “лидера” посылок;
- число циклов контроля изменившегося состояния сигналов ТС;
- число циклов удержания активного состояния исполнительного сигнала ТУ;
- наличие и тип оконечного устройства: РК-4, радиостанция;
- для РК-4: наличие резервного канала обмена с УПУ; время переключения на резервный канал связи при отсутствии (некорректности) сообщений по основному каналу; вариант управления трактом передачи резервного канала РК-4 (передача исключительно по основному каналу или по основному и резервному); время Трез переключения на резервную линию связи.
Параметры каналов ТИТ (устанавливаются поканально):
- коэффициент сглаживания Ксгл выбросов значений ТИТ;
- уставки допускового (статического) контроля значений: ВУД, ВАУ, ВПУ, НПУ, НАУ, НУД;
- гистерезис g уставок допускового (статического) контроля значений;
- уставки допускового (динамического) контроля скорости изменения значений: УСА и УСП.
Установка адреса (адресация) устройства производится монтажом перемычек на ответной части разъема "АДРЕС" на лицевой панели КТМС-М2 в соответствии с табл.11. Например, для задания адреса 02H необходимо соединить между собой выводы 1, 3...5, 7 и 8 розетки, устанавливаемой в разъем “АДРЕС” контроллера.
Вывод | Соединение между выводами разъема "АДРЕС" КТМС-М2 для задания адреса УКПМ | ||||||||||||||||
Усл. обозн. | № | 00H | 01H | 02H | 03H | 04H | 05H | 06H | 07H | 08H | 09H | 0AH | 0BH | 0CH | 0DH | 0EH | 0FH |
ADR00 | 1 | да |
| да |
| да |
| да |
| да |
| да |
| да |
| да |
|
ADR01 | 2 | да | да |
|
| да | да |
|
| да | да |
|
| да | да |
|
|
ADR02 | 8 | да | да | да | да |
|
|
|
| да | да | да | да |
|
|
|
|
ADR03 | 7 | да | да | да | да | да | да | да | да |
|
|
|
|
|
|
|
|
ADR04 | 4 | да | да | да | да | да | да | да | да | да | да | да | да | да | да | да | да |
ADRP | 3 |
| да | да |
| да |
|
| да | да |
|
| да |
| да | да |
|
GND | 5 | да | да | да | да | да | да | да | да | да | да | да | да | да | да | да | да |
Вывод | Соединение между выводами разъема "АДРЕС" КТМС-М2 для задания адреса УКПМ | ||||||||||||||||
Усл. обозн. | № | 10H | 11H | 12H | 13H | 14H | 15H | 16H | 17H | 18H | 19H | 1AH | 1BH | 1CH | 1DH | 1EH | 1FH |
ADR00 | 1 | да |
| да |
| да |
| да |
| да |
| да |
| да |
| да |
|
ADR01 | 2 | да | да |
|
| да | да |
|
| да | да |
|
| да | да |
|
|
ADR02 | 8 | да | да | да | да |
|
|
|
| да | да | да | да |
|
|
|
|
ADR03 | 7 | да | да | да | да | да | да | да | да |
|
|
|
|
|
|
|
|
ADR04 | 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ADRP | 3 | да |
|
| да |
| да | да |
|
| да | да |
| да |
|
| да |
GND | 5 | да | да | да | да | да | да | да | да | да | да | да | да | да | да | да | да |
Установка скорости обмена устройства сообщениями с пунктом управления
Скорость обмена устройства сообщениями с УПУ может быть установлена из ряда: 100, 200, 300 и 600 Бод. Установка скорости обмена производится одним из двух вариантов:
- репрограммированием УФПЗУ контроллера КТМС-М2;
- кнопками выбора режима адаптера типа ТА-2, установленного в разъем “ДИАГНОСТИКА” контроллера КТМС-М2.
Программная установка скорости описана ниже.
Установка характеристических частот передачи F1 и F0
Характеристические частоты передачи информации определяются установленными значениями кодов K1 и K0.
При выборе значений характеристических частот следует учитывать значения краевых частот полосы пропускания установленных фильтров ФНЧ и ФВЧ приемника (табл.17), соблюдая условие:
Fн1 < F0 < F1 < Fв1
Значения кодов K1 и K0 определяются следующим порядком:
- из табл.12 выбирается значение частоты передачи, соответствующее значению логической "единицы" и заносится в первую строку шаблона табл.13;
- из табл.12 выбирается значение частоты передачи, соответствующее значению логического "нуля" и заносится во вторую строку шаблона табл.13;
- по шаблону табл.13 рассматриваются раздельно по колонкам соответствующие значения весовых коэффициентов:
Частота, Гц | K (BIN) | Частота, Гц | K (BIN) | Частота, Гц | K (BIN) | Частота, Гц | K (BIN) |
3429 | 00101010 | 2215 | 01000001 | 1636 | 01011000 | 1297 | 01101111 |
3349 | 00101011 | 2182 | 01000010 | 1618 | 01011001 | 1286 | 01110000 |
3273 | 00101100 | 2149 | 01000011 | 1600 | 01011010 | 1274 | 01110001 |
3200 | 00101101 | 2118 | 01000100 | 1582 | 01011011 | 1263 | 01110010 |
3130 | 00101110 | 2087 | 01000101 | 1565 | 01011100 | 1252 | 01110011 |
3064 | 00101111 | 2057 | 01000110 | 1548 | 01011101 | 1241 | 01110100 |
3000 | 00110000 | 2028 | 01000111 | 1532 | 01011110 | 1231 | 01110101 |
2939 | 00110001 | 2000 | 01001000 | 1516 | 01011111 | 1220 | 01110110 |
2880 | 00110010 | 1973 | 01001001 | 1500 | 01100000 | 1210 | 01110111 |
2824 | 00110011 | 1946 | 01001010 | 1485 | 01100001 | 1200 | 01111000 |
2769 | 00110100 | 1920 | 01001011 | 1469 | 01100010 | 1190 | 01111001 |
2717 | 00110101 | 1895 | 01001100 | 1455 | 01100011 | 1180 | 01111010 |
2667 | 00110110 | 1870 | 01001101 | 1440 | 01100100 | 1171 | 01111011 |
2618 | 00110111 | 1846 | 01001110 | 1426 | 01100101 | 1161 | 01111100 |
2571 | 00111000 | 1823 | 01001111 | 1412 | 01100110 | 1152 | 01111101 |
2526 | 00111001 | 1800 | 01010000 | 1398 | 01100111 | 1143 | 01111110 |
2483 | 00111010 | 1778 | 01010001 | 1385 | 01101000 | 1134 | 01111111 |
2441 | 00111011 | 1756 | 01010010 | 1371 | 01101001 | 1125 | 10000000 |
2400 | 00111100 | 1735 | 01010011 | 1358 | 01101010 | 1116 | 10000001 |
2361 | 00111101 | 1714 | 01010100 | 1346 | 01101011 | 1108 | 10000010 |
2323 | 00111110 | 1694 | 01010101 | 1333 | 01101100 | 1099 | 10000011 |
2286 | 00111111 | 1674 | 01010110 | 1321 | 01101101 | 1091 | 10000100 |
2250 | 01000000 | 1655 | 01010111 | 1309 | 01101110 | 1083 | 10000101 |
- одинаковые значения "единиц" первых двух строк одной колонки означают связь соответствующего этой колонке контакта колодки 3X3(X7) (строка 3 табл.13) с контактом 4 колодки 3X4(X8);
- одинаковые значения "нулей" первых двух строк одной колонки означают связь соответствующего этой колонке контакта колодки 3X3(X7) (строка 3 табл.13) с контактом 3 колодки 3X4(X8);
- при неодинаковых значениях первых двух строк одной колонки и значении "единицы" первой строки означает связь соответствующего этой колонке контакта колодки 3X3(X7) (строка 3 табл.13) с контактом 2 колодки 3X4(X8);
- при неодинаковых значениях первых двух строк одной колонки и значении "нуля" первой строки означает связь соответствующего этой колонке контакта колодки 3X3(X7) (строка 3 табл.13) с контактом 1 колодки 3X4(X8).
Предупреждение. При выборе значений характеристических частот следует учитывать наличие в тракте передачи полосового фильтра. Изменение частот среза этого фильтра осуществляется на предприятии-изготовителе.
1 | Nпер логической "единицы" |
|
|
|
|
|
|
|
|
2 | Nпер логического "нуля" |
|
|
|
|
|
|
|
|
3 | Контакты колодки 3X3(X7) | 1 | 8 | 7 | 2 | 3 | 6 | 5 | 4 |
4 | Контакты колодки 3X4(X8) |
|
|
|
|
|
|
|
|
В табл.14 приведен пример распределения связей между контактами колодок 3X3(X7) и 3X4(X8) при установке частот 2571 (логический "нуль") и 2717 (логическая "единица") Гц.
Таблица 14
1 | Nпер логической "единицы" | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 1 |
2 | Nпер логического "нуля" | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 |
3 | Контакты колодки 3X3(X7) | 1 | 8 | 7 | 2 | 3 | 6 | 5 | 4 |
4 | Контакты колодки 3X4(X8) | 3 | 3 | 4 | 4 | 1 | 2 | 3 | 2 |
Установка значения средней (опорной) частоты демодулятора Fср
Средняя частота Fср устанавливается на предприятии-изготовителе монтажом перемычками кода N на НП2. Расчет значения Fср производится по формуле:
Fср = F0+(F1-F0)/2, (1 )
где F1 и F0 - характеристические частоты “логической единицы” и “логического нуля” принимаемого сигнала, соответственно, Гц.
- Близкое к вычисленному по (1) значение Fср выбирается из табл.15, а соответствующее ему значение кода N в двоичном представлении устанавливается монтажом перемычек на НП2.
Fср, Гц | N (BIN) | Fср, Гц | N (BIN) | Fср, Гц | N (BIN) | Fср, Гц | N (BIN) | Fср, Гц | N (BIN) | Fср, Гц | N (BIN) |
3349 | 01010110 | 2692 | 01101011 | 2250 | 10000000 | 1933 | 10010101 | 1694 | 10101010 | 1508 | 10111111 |
3310 | 01010111 | 2667 | 01101100 | 2233 | 10000001 | 1920 | 10010110 | 1684 | 10101011 | 1500 | 11000000 |
3273 | 01011000 | 2642 | 01101101 | 2215 | 10000010 | 1907 | 10010111 | 1674 | 10101100 | 1492 | 11000001 |
3236 | 01011001 | 2618 | 01101110 | 2198 | 10000011 | 1895 | 10011000 | 1665 | 10101101 | 1485 | 11000010 |
3200 | 01011010 | 2595 | 01101111 | 2182 | 10000100 | 1882 | 10011001 | 1655 | 10101110 | 1477 | 11000011 |
3165 | 01011011 | 2571 | 01110000 | 2165 | 10000101 | 1870 | 10011010 | 1646 | 10101111 | 1469 | 11000100 |
3130 | 01011100 | 2549 | 01110001 | 2149 | 10000110 | 1858 | 10011011 | 1636 | 10110000 | 1462 | 11000101 |
3097 | 01011101 | 2526 | 01110010 | 2133 | 10000111 | 1846 | 10011100 | 1627 | 10110001 | 1455 | 11000110 |
3064 | 01011110 | 2504 | 01110011 | 2118 | 10001000 | 1834 | 10011101 | 1618 | 10110010 | 1447 | 11000111 |
3032 | 01011111 | 2483 | 01110100 | 2102 | 10001001 | 1823 | 10011110 | 1609 | 10110011 | 1440 | 11001000 |
3000 | 01100000 | 2462 | 01110101 | 2087 | 10001010 | 1811 | 10011111 | 1600 | 10110100 | 1433 | 11001001 |
2969 | 01100001 | 2441 | 01110110 | 2072 | 10001011 | 1800 | 10100000 | 1591 | 10110101 | 1426 | 11001010 |
2939 | 01100010 | 2420 | 01110111 | 2057 | 10001100 | 1789 | 10100001 | 1582 | 10110110 | 1419 | 11001011 |
2909 | 01100011 | 2400 | 01111000 | 2043 | 10001101 | 1778 | 10100010 | 1574 | 10110111 | 1412 | 11001100 |
2880 | 01100100 | 2380 | 01111001 | 2028 | 10001110 | 1767 | 10100011 | 1565 | 10111000 | 1405 | 11001101 |
2851 | 01100101 | 2361 | 01111010 | 2014 | 10001111 | 1756 | 10100100 | 1557 | 10111001 | 1398 | 11001110 |
2824 | 01100110 | 2341 | 01111011 | 2000 | 10010000 | 1745 | 10100101 | 1548 | 10111010 | 1391 | 11001111 |
2796 | 01100111 | 2323 | 01111100 | 1986 | 10010001 | 1735 | 10100110 | 1540 | 10111011 | 1385 | 11010000 |
2769 | 01101000 | 2304 | 01111101 | 1973 | 10010010 | 1725 | 10100111 | 1532 | 10111100 | 1378 | 11010001 |
2743 | 01101001 | 2286 | 01111110 | 1959 | 10010011 | 1714 | 10101000 | 1524 | 10111101 | 1371 | 11010010 |
2717 | 01101010 | 2268 | 01111111 | 1946 | 10010100 | 1704 | 10101001 | 1516 | 10111110 | 1365 | 11010011 |
Соответствие весовых коэффициентов разрядов двоичного представления значения N приведено в табл.16.
Разряды значения N | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
Контакты колодки 3X8(Х12) | 1 | 7 | 8 | 2 | 4 | 5 | 6 | 3 |
Значение "0" весового коэффициента по табл.16 означает соединение соответствующего контакта 3X8(X12) (НП2) с контактом 9 3X8(X12), значение "1" весового коэффициента означает соединение соответствующего контакта 3X8(X12) с контактом 10 3X8(X12).
Установка краевых значений частот полосы пропускания ПФ приемника контроллера КТМС-М2
Краевые значения частот Fн и Fв полосы пропускания ПФ приемника ТЧ устанавливаются на предприятии-изготовителе согласно карте заказа на поставку изделий. Смена значений Fн и Fв может быть выполнена исключительно заменой элементов - гибридных фильтров серии 298. Фильтры серии 298 выпускаются по типономинальному ряду. Номенклатура и параметры фильтров, используемых для выпускаемых устройств, приведены в табл.17.
Параметр | Значения параметра по типономиналам ФВЧ, Гц | |||||
по рис.55 | ФВ11 | ФВ12 | ФВ13 | ФВ14 | ФВ15 | ФВ16 |
Fн1 | 970 | 1213 | 1552 | 1892 | 2425 | 3056 |
Fн2 | 291 | 363 | 465 | 567 | 727 | 916 |
| Значения параметра по типономиналам ФНЧ, Гц | |||||
| ФН12 | ФН13 | ФН14 | ФН15 | ФН16 | ФН17 |
Fв1 | 1287 | 1648 | 2008 | 2575 | 3244 | 4017 |
Fв2 | 3861 | 4944 | 6024 | 7725 | 9732 | 12051 |
Ослабление входного сигнала полосовым фильтром на частоте Fн2 - не менее 50 дБ, на частоте Fв2 - не менее 41 дБ

Рис.55 . Положение краевых частот полосы пропускания ПФ приемника ТЧ
Установка параметра L для обнаружения несущей
Установка параметра L, определяющего число периодов частоты F0 для обнаружения несущей, производится установкой перемычки на наборном поле НП3 контроллера КТМС-М2. Положение перемычки для различных значений L представлено в табл.18.
Значение L должно выбираться по возможности меньшим. Если уровень шума в паузе превышает порог чувствительности приемника, значение L необходимо повысить. При определении значения L должно выдерживаться условие: L - S-F0/V, где S - длина “лидера” принимаемых сообщений, бит; F0 - характеристическая частота “логического нуля” принимаемого сообщения, Гц; V - скорость обмена информацией, Бод. На предприятии-изготовителе при отсутствии иных требований устанавливается L=8.
Перемычка между контактами 3X6(X10) (НП3) | 4 и 1 | 4 и 2 | 4 и 3 | 4 и 5 | 4 и 6 |
Значение L | 4 | 8 | 16 | 32 | 64 |
Установка программируемых параметров
Следующие параметры устанавливаются на предприятии-изготовителе устройства программированием УФПЗУ контроллера КТМС-М2:
- скорость обмена сообщениями по каналу ТЧ из ряда: 100, 200, 300 и 600 Бод;
- длина S “лидера” посылок, выдаваемых устройством. Длина “лидера” для устройства задается числом битовых интервалов Т=1/V, где V - скорость обмена, Бод. Общая длительность “лидера” определяется выражением: Tлид = S/V, с;
- число циклов непрерывного подтверждения изменившегося состояния сигналов ТС;
- тип оконечного устройства: РК-4 или радиостанция;
- параметры обслуживания РК-4: время переключения на резервный канал и необходимость дублирования передачи по резервному каналу. При определении времени Трез переключения на резервную линию связи необходимо учитывать соотношение: Трез - Tакт;
- по отдельным каналам ТИТ:
- коэффициент Ксгл сглаживания выбросов значений;
- уставки допускового (статического) контроля значений: ВУД, ВАУ, ВПУ, НПУ, НАУ, НУД;
- гистерезис g уставок допускового (статического) контроля значений;
- число циклов удержания активного состояния исполнительного сигнала ТУ;
- уставки допускового (динамического) контроля скорости изменения значений: УСА и УСП.
Потребитель имеет возможность самостоятельно переопределить параметры репрограммированием УФПЗУ контроллера КТМС-М2. Подготовка файла прошивки УФПЗУ производится программой cnf_kp.exe, поставляемой предприятием-изготовителем устройства. Программирование УФПЗУ производится на универсальном программаторе.
ХАРАКТЕРНЫЕ НЕИСПРАВНОСТИ И СПОСОБЫ ИХ УСТРАНЕНИЯ
Перечень неисправностей, вероятные причины появления и способы их устранения приведены в табл.19.
Характерные неисправности, внешние проявления и дополнительные признаки | Вероятная причина | Способ устранения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дата консервации совпадает с датой упаковывания.
Срок защиты без переконсервации - 1 год.

Рис.56 . Разметка крепежных отверстий блока КПМ

Рис.57 . Разметка крепежных отверстий блока БКС
БКС закрепляется на вертикальной несущей плоскости с помощью 4-х винтов М5.
При монтаже основание блока БКС должно быть заземлено. Подключение основания к контуру заземления осуществляется через зажим “под винт” М5. При необходимости крышка БКС может быть опломбирована.
При монтаже цепи датчиков ТИТ, ТС и ТИИ не допускается прокладка в одном контрольном кабеле или близкое расположение:
- цепей ТС и исполнительных цепей ТУ;
- цепей ТИИ и исполнительных цепей ТУ;
- цепей ТИТ и цепей ТС или исполнительных цепей ТУ.
Предупреждение: Входные цепи каналов ТИТ должны иметь общую гальваническую точку, которая должна быть заземлена.
Для токового исполнения входа ТИТ 0...20 мА (4...20 мА) на клеммнике КЛТИТ должны быть установлены шунты «20 мА». Поставка шунтов «20 мА» осуществляется по карте заказа.
Закрепите контрольные кабели в кабеледержателях блоков БКС и выполните монтаж проводников датчиков ТС, ТИТ и ТИИ на колодках клеммников БКС согласно проектной документации на монтаж объекта.Снимите крышки и закрепите основания блоков БРП на вертикальной монтажной плоскости (стене). Разметка крепежных отверстий для установки БРП аналогична разметке блоков БКС.Закрепите контрольные кабели в кабеледержателях и выполните монтаж проводников цепей ТУ на клеммных колодках блоков БРП согласно проектной документации на монтаж объекта.Выполните монтаж блока КПМ:- снимите переднее обрамление блока КПМ, предварительно вывернув два винта в нижней части блока;
- вывернув по одному винту крепления модулей в верхней части шасси, последовательно снимите модули и освободите шасси КПМ;
- закрепите шасси КПМ на вертикально расположенной раме или плоскости четырьмя винтами с гайками и шайбами из комплекта поставки;
- установите переднее обрамление блока КПМ с держателем кабелей и закрепите его винтами снизу;
- установите сетевой шнур питания устройства, удалив крышку разъема сетевого ввода блока БПКП.М;
- присоедините линию связи к разъему "ЛИНИЯ" контроллера КТМС блока КПМ;
- монтажом перемычек на ответной части (розетке-заглушке) разъема “АДРЕС” контроллера КТМС установите адрес устройства на канале ТЧ согласно табл.11. Розетку-заглушку "АДРЕС" сочлените с разъемом "АДРЕС" контроллера КТМС;
- установите переднее обрамление блока КПМ с держателем кабелей и закрепите его винтами снизу;
- подключите жгуты клеммников БКС и БРП к соответствующим разъемам блока КПМ согласно маркировке на крышках разъемов;
- подайте сигнал тональной частоты на вход линейного приемника КТМС. Контролируя осциллографом форму и уровень сигнала на контрольных гнездах, добейтесь регулировкой подстроечного резистора на лицевой панели контроллера КТМС максимального уровня сигнала при отсутствии искажений формы.
В таблице 20 приведены рекомендуемые нормы на техническое обслуживание устройства УКПМ.
Содержание работы | Состав звена | Норма времени на одно устройство, час | ||
Профессия | Разряд | Численность | ||
Проверка один раз в день |
|
|
|
|
| ИТР | - | 1 | 0,5 |
| ИТР | - | 1 | 0,5 |
Проверка два раза в год |
|
|
|
|
| ИТР | - | 1 | 2,5 |
| ИТР | - | 1 | 1,2 |
|
|
|
|
|
| ИТР | - | 1 | 4,5 |
| ИТР, | - | 1 | 2,0 |
| ИТР | - | 1 | 1,5 |
| ИТР | - | 1 | 2,5 |
Проверка один раз в год |
|
|
|
|
| Электромонтер | 5 | 1 | 1,2 |
| Электромонтер | 5 | 1 | 4,0 |
|
|
|
|
|
| ИТР, | - | 1 | 2,0 |
| ИТР, | - | 1 | 3,0 |
| ИТР, | - | 1 | 2,5 |
| ИТР, | - | 1 | 3,0 |
Содержание работы | Состав звена | Норма времени на одно устройство, час | ||
Профессия | Разряд | Численность | ||
| ИТР, | - | 1 | 1,5 |
| ИТР, | - | 1 | 2,0 |
| ИТР | - | 1 | 0,5 |
| ИТР | - | 1 | 1,0 |
| ИТР | - | 1 | 2,0 |
Арендное предприятие "ЗИП-СИСТЕМА"
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
ОКП 42 3295
ТЕХНИЧЕСКОЕ ОПИСАНИЕ И ИНСТРУКЦИЯ ПО ЭКСПЛУАТАЦИИ 3.785.003 ТО
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
УКПМ УСТРОЙСТВА
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
1. ВВЕДЕНИЕ
1.1. Настоящее техническое описание и инструкция по эксплуатации (ТО) содержит сведения, необходимые для обеспечения полного использования технических возможностей устройства контролируемого пункта малогабаритного УКПМ (в дальнейшем - устройство), правильной его эксплуатации и поддержания в постоянной готовности к действию в составе телемеханического комплекса.
1.2. Принятые в ТО условные сокращения и обозначения: АП - адрес телемеханического контролируемого пункта; БКС - блок клеммных соединителей; БП - блок питания; БРП - блок реле повторителей; ЗТ - запрос требования на обслуживание; КПМ-1 (КПМ-2) - аппаратный блок УКПМ; КТМС - контроллер телемеханической связи; КУКП - контроллер ввода-вывода КПМ-1 (КПМ-2); МВТС - модуль ввода сигналов ТС; МВТР - модуль вывода сигналов ТР; МВТУ - модуль вывода сигналов ТУ; МВИС - модуль ввода сигналов ТИИ (импульсных); ОТ - опрос требований на обслуживание; ТЧ - сигнал тональной частоты, используемый для передачи/приема телеинформации по каналам связи; ТИ - телеизмерение текущих значений параметров; ТИИ - телеизмерение интегральных значений параметров; УКПМ - устройство контролируемого пункта малогабаритное; УПУ - устройство пункта управления.
Остальные обозначения и сокращения соответствуют общепринятым в технической литературе.
2. НАЗНАЧЕНИЕ
2.1. Устройство имеет два исполнения: УКПМ-1 и УКПМ-2. Конструктивно каждое из устройств состоит из двух блоков: блока КПМ-1 или блока КПМ-2 и блока БКС.
В блок КПМ-1 входит модуль МВТР, а в блок КПМ-2 входит модуль МВИС.
Блоки БКС могут отличаться конструкцией корпусов из-за возможной замены материалов.
2.2. Устройство входит в состав управляющего вычис-лительного телемеханического комплекса УВТК-120.2, предназначенного для применения в автоматизированных системах управления объектами нефтяной, газовой промышленности и других объектов народного хозяйства.
2.3. Устройство относится к восстанавливаемым многофункциональным изделиям.
2.4. По защищенности от воздействий окружающей среды устройство относится к обыкновенному исполнению по ГОСТ 12997-84.
2.5. По устойчивости к воздействию температуры и влажности окружающего воздуха устройство соответствует группе C2 по ГОСТ 26.205-88, но для работы при температуре от минус 50 до плюс 70 оC.
2.6. По устойчивости к воздействию атмосферного давления устройство соответствует группе P1 по ГОСТ 12997-84.
2.7. Устройство предназначено для выполнения следующих функций:
ввод сигналов двухпозиционных датчиков (ТС);
ввод сигналов текущих значений параметров (ТИ);
вывод сигналов телеуправления двухпозиционными объектами (ТУ);
вывод сигналов телерегулирования (ТР) на управляемый объект - для УКПМ-1 или ввод сигналов интегральных значений параметров (ТИИ) - для УКПМ-2;
обмен телеинформацией с УПУ в режиме телепередачи по запросу.
3. ТЕХНИЧЕСКИЕ ДАННЫЕ
3.1. Информационная емкость устройств по функциям:
ТИ - не более 16 каналов измерения;
ТС - не более 64 каналов контроля;
ТУ - не более 32 каналов управления;
ТРК - 1 канал регулирования - для УКПМ-1, или ТИИ - не более 8 каналов измерения - для УКПМ-2.
3.2. Питание устройства осуществляется от сети переменного тока напряжением (220+33-44) В, частотой (50 + 2,5) Гц или от источника постоянного тока напряжением (24+3,6-4,8) В.
3.3. Мощность, потребляемая устройством от источника переменного и постоянного тока, не более 30 В А.
3.4. Характеристики каналов
3.4.1. Характеристики каналов телеизмерений текущих значений параметров (ТИ) устройства
3.4.1.1. Выходные сигналы датчиков ТИ должны быть представлены:
1) величиной напряжения постоянного тока в диапазоне: от минус 5 до плюс 5 В; от минус 10 до плюс 10 В;
2) величиной постоянного тока в диапазонах: от минус 5 до плюс 5 мА; от минус 20 до плюс 20 мА.
3.4.1.2. Предел допускаемого значения основной приведенной погрешности преобразования сигналов токовых датчиков в код и класс точности преобразования - 0,25.
3.4.1.3. Предел допускаемых значений дополнительной приведенной погрешности преобразования сигналов токовых датчиков в код, вызываемой воздействием каждого из факторов: изменением напряжения питания, изменением частоты питающего напряжения, изменением температуры окружающего воздуха на каждые 10 оC, не более половины предела основной приведенной погрешности.
3.4.2. Характеристики каналов телесигнализации (ТС) устройства
3.4.2.1. Устройство обеспечивает работу с датчиками ТС контактного или бесконтактного типа.
Для контактных датчиков сопротивление контакта должно быть: замкнутого состояния контакта - не более 200 Ом вместе с подводящими проводами; разомкнутого состояния контакта - не менее 200 кОм.
Для бесконтактных датчиков состояние ВКЛЮЧЕНО должно быть представлено уровнем напряжения постоянного тока от 0 до 1,0 В, состояние ОТКЛЮЧЕНО - от 19,2 до 28,8 В.
3.4.3. Характеристики каналов телеуправления и телерегули- рования устройства
3.4.3.1. Выходные элементы телеуправления и телерегули-рования кодового обеспечивают коммутацию активной нагрузки током до 0,1 А в цепях постоянного тока напряжением до 30 В.
3.4.4. Характеристики каналов телеизмерений интегральных значений параметров устройства
3.4.4.1. Устройство обеспечивает работу с датчиками ТИИ контактного или бесконтактного типа.
Для контактных датчиков сопротивление контакта должно быть: замкнутого состояния контакта - не более 200 Ом вместе с подводящими проводами; разомкнутого состояния контакта - не менее 200 кОм.
Для бесконтактных датчиков выходные сигналы должны быть представлены импульсами напряжения положительной полярности амплитудой (24 + 2,4) В, причем низкий уровень (пауза) должен быть представлен напряжением от 0 до 1,0 В. Длительность импульса или паузы должна быть не менее 10 мс.
3.4.4.2. Максимальная емкость канальных счетчиков не более 65535 импульсов.
3.4.5. Характеристики канала ТЧ устройства
3.4.5.1. Устройство обеспечивает передачу и прием сообщений по некоммутируемым каналам связи по ГОСТ 25007-81: 1) с двух или четырехпроводным окончанием; 2) радиоканалам с полудуплексным каналом; 3) физическим двух или четырехпроводным линиям связи.
Таблица 1
+-------------------------------------------------------------+ | Частота, Гц | Частота, Гц | Частота, Гц | Частота, Гц| |---------------+---------------+---------------+-------------| | 1107,7 | 1345,8 | 1714,3 | 2360,7 | | 1116,3 | 1358,5 | 1734,9 | 2400,0 | | 1125,0 | 1371,4 | 1756,1 | 2440,7 | | 1133,9 | 1384,6 | 1777,8 | 2482,8 | | 1142,9 | 1398,1 | 1800,0 | 2526,3 | | 1152,0 | 1411,8 | 1822,8 | 2571,4 | | 1161,3 | 1425,7 | 1846,2 | 2618,2 | | 1170,7 | 1440,0 | 1870,1 | 2666,7 | | 1180,3 | 1454,5 | 1894,7 | 2717,0 | | 1190,1 | 1469,4 | 1920,0 | 2769,2 | | 1200,0 | 1484,5 | 1945,9 | 2823,5 | | 1210,1 | 1500,0 | 1972,6 | 2880,0 | | 1220,3 | 1515,8 | 2000,0 | 2938,8 | | 1230,8 | 1531,9 | 2028,2 | 3000,0 | | 1241,4 | 1548,4 | 2057,1 | 3063,8 | | 1252,2 | 1565,2 | 2087,0 | 3130,4 | | 1263,2 | 1582,4 | 2117,6 | 3200,0 | | 1274,3 | 1600,0 | 2149,3 | 3272,7 | | 1285,7 | 1618,0 | 2181,8 | 3348,8 | | 1297,3 | 1636,4 | 2215,4 | 3428,6 | | 1309,1 | 1655,2 | 2250,0 | | | 1321,1 | 1674,4 | 2285,7 | | | 1333,3 | 1694,1 | 2322,6 | | +-------------------------------------------------------------+
3.4.5.2. Вид модуляции передаваемых сообщений между устройством и УПУ - частотная модуляция. Развязка канала ТЧ устройств - трансформаторная, раздельно по входу и выходу.
3.4.5.3. Характеристические частоты обмена информации по некоммутируемым каналам ТЧ могут быть установлены любыми из табл.1. Отклонения установленных характеристических частот не превышают + 1 Гц.
3.4.5.4. Скорость обмена телеинформацией между УПУ и УКПМ по каждому из каналов ТЧ независимо может быть установлена любой из ряда 50, 100, 200, 300 и 600 Бод.
3.4.5.5. Значения краевых частот полосы пропускания входного полосового фильтра приемника могут быть установлены (по карте заказа) любыми из значений, приведенных в табл.2.
Таблица 2
+-------------------------------------------------------------+ | Значения верхней и нижней частот полосы пропускания, Гц | |-------------------------------------------------------------| | 970-1030 | 1552-1648 | 2425-2575 | 3783-4017 | | 1213-1287 | 1892-2008 | 3056-3244 | | +-------------------------------------------------------------+
3.4.5.6. Коэффициент ослабления полосового фильтра в полосе задерживания при частоте (0,3 ... 0,5)Fн не менее 50 Дб и (1,7 ... 3)Fв не менее 41 Дб. Коэффициент неравномерности АЧХ при частоте входного сигнала от 0,9Fн до 0,9Fв не превышает 2 Дб.
3.4.5.7. Уровень сигнала ТЧ на выходе канального передатчика регулируется в диапазоне от минус 28 до 0 Дб (от 30 мВ до 0,775 В). Чувствительность приемника ТЧ - не хуже минус 30 Дб.
3.4.5.8. Выходной импеданс передатчиков ТЧ - (600 + 60) Ом. Входной импеданс приемников ТЧ - (600 + 60) Ом в диапазоне частот от 300 до 3400 Гц.
3.5. Массогабаритные характеристики устройства
3.5.1. Масса устройства: блок КПМ-1 (КПМ-2) - не более 6,0 кг; блок БКС - не более 6,5 кг.
3.5.2. Габаритные размеры устройства: блок КПМ-1 (КПМ-2) - 300х271х276 мм; блок БКС - 494х380х112 мм.
3.6. Климатические характеристики устройства
3.6.1. Устройство в процессе эксплуатации устойчиво к воздействию температуры от минус 50 до плюс 70 оC при максимальной скорости изменения температуры 20 оC/ч.
3.6.2. Устройство в процессе эксплуатации устойчиво к воздействию относительной влажности от 5 до 100 % с конденсацией влаги.
3.6.3. Устройство в транспортной выдерживает температуру от минус 60 до плюс 70 оC при максимальной скорости изменения температуры 20 оC/ч.
3.6.4. Устройство в транспортной таре выдерживает воздествие относительной влажности (95 + 3) % при температуре плюс 35 оC.
3.7. Устройство устойчиво к воздействию синусоидальных вибраций в диапазоне частот от 5 до 25 Гц, действующих последовательно вдоль трех взаимно перпендикулярных осей, с амплитудой смещения для частоты ниже частоты перехода 0,1 мм (частота перехода выбирается от 57 до 62 Гц).
4. РАБОТА УСТРОЙСТВА
4.1. Конструкция устройства
Устройство состоит из конструктивно обособленных и функционально законченных блоков: КПМ-1 или КПМ-2 и БКС. На рис.1 и 2 представлены габаритные чертежи блоков КПМ и БКС.
4.1.1. КПМ-1 (КПМ-2) имеет модульную конструкцию и содержит фукциональные элементы - модули и контроллеры (далее - элементы): БП, КТМС, КУКП, МВТС, МВТУ и МВТР в составе КПМ-1 или МВИС в составе КПМ-2. Каждый элемент выполнен на печатной плате, размещенной в индивидуальном пластмассовом кожухе.
На лицевых панелях элементов расположены индикаторы и присоединительные разъемы для подключения жгутов связи с БКС, БРП и каналом ЧМ. С тыльной стороны элементов установлены разъемы для информационного обмена в блоке.
Элементы укрепляются на вертикально расположенном шасси, обеспечивающем их механическое крепление и электрическую связь. В нижней части элементы имеют специальные кронштейны для зацепления за элементы шасси, а в верхней части крепятся винтом. В передней части КПМ-1 (КПМ-2) элементы обрамляются рамкой, к нижней части которой крепится кабеледержатель.
4.1.2. БКС предназначен для обеспечения монтажа цепей датчиков ТИ, ТС, ТИИ и приемника ТРК на объекте. Соединения цепей датчиков выполняются на четырех 48-ми контактных клеммных колодках, обеспечивающих монтаж оголенных (без облуживания) проводников с сечением жил до 2,5 мм2. Назначение контактов клеммных колодок приведено в приложении 1.
БКС предназначен для установки в непосредственной близости от блока КПМ. Длина штатных жгутов БКС для подключения к КПМ не более 800 мм.
Для механического крепления проводников (кабелей) цепей датчиков предусмотрены кабельные зажимы. Вывод проводников (кабелей) может производиться на три стороны. Клеммные колодки закрываются крышкой. Крепление крышки обеспечивает возможность ее опломбирования. Для подключения к контуру защитного заземления в нижней части корпуса БКС предусмотрен зажим под винт М5.
4.2. Обмен устройства с УПУ
4.2.1. Устройство обменивается с УПУ телемеханическими сообщениями (далее - сообщения) по запросу УПУ. Функционально сообщения различаются на:
команды УПУ: опрос требования устройства на обслуживание (ОТ), телеуправление включением (ТУВ), телеуправление отключением(ТУО), настройка уставок ТИ (НУТИТ);
.G.D:\UWTK\KPM.PCX;15.088 cm;15.238 cm;PCX
Рис. 1. Габаритный чертеж блока КПМ
запросы УПУ: запрос группы ТС (ЗГТС), запрос группы ТИ (ЗГТИТ), запрос массива ТС (ЗМТС), запрос группы ТИИ без сброса (ЗГТИИ1), запрос группы ТИИ со сбросом (ЗГТИИ2), запрос значений уставок ТИ текущих значений (ЗУТИТ) запрос блока ошибок оборудования (ЗБО);
известительные сообщения УКПМ-2: данные группы ТС (ГТС), данные массива ТС (МТС), данные группы ТИ (ГТИТ), данные группы ТИИ без сброса (ГТИИ1), данные группы ТИИ со сбросом (ГТИИ2), значения уставок ТИ (УТИТ). .G.D:\UWTK\BKS.PCX;14.032 cm;14.476 cm;PCX Рис. 2. Габаритный чертеж БКС
Выполняемыми устройством функциями считаются процедуры обработки устройством команд и запросов УПУ.
4.2.2. Структура телемеханических сообщений
Структура сообщений в общем виде представлена на рис. 3. Все коды в сообщении устанавливаются в положительной логике.
+-------------------------------------------------------------+ | Лидер | Адрес | Код | Номер |Данные| Конец |Байт защиты| | | УКП |функции| канала | |сообщения| сообщения | +-------------------------------------------------------------+
Рис. 3. Общая структура телемеханических сообщений
Лидер, возглавляющий сообщение, представляет собой нулевой байт, предназначенный для настройки передатчика и приемника канала ТЧ, а также для реализации временной задержки для включения шумоподавителя радиостанции.
Адрес УКП передается одним байтом (далее - байт АП) с битом защиты по паритету (нечетность). Дополнительно байт АП содержит в двух старших разрядах единицы - признак начала информационной части сообщения. По признаку старта посылки производится побитная синхронизация приема сообщения кварцевым генератором.
Код функции передается одним байтом (далее - байт КФ) с разрядом защиты по паритету (нечетность).
Номер канала передается одним байтом номера группы (далее - байт НГ) с разрядом защиты по паритету (нечетность).
Данные сообщения передаются побайтно с дополнением разрядом защиты по паритету (нечетность).
Конец сообщения передается одним байтом с дополнительным разрядом защиты по паритету (четность) и имеют признак наличия (или нет) в сообщении байта циклической защиты.
Байт защиты сообщения вместо разряда паритетной защиты дополняется девятым информационным разрядом. Код образующего полинома защиты: Пз=X9+X5+X3+1. Защищается целиком сообщение, предшествующее коду защиты, исключая байт АКП.
4.2.3. Функция ОТ устройства
После получения от УПУ команды ОТ выбранное (при идентификации байта АП индивидуальному адресу устройства) устройство передает в канал ТЧ (в адрес УПУ) одно из нижеследующих сообщений в зависимости от ситуации:
ОТ - при отсутствии зарегистрированных со времени последнего опроса изменений состояний датчиков ТС или превышения уровней сигналов с датчиков ТИ уставок допускового контроля со времени последнего опроса состояний этих сигналов;
ЗГТИТ- при превышении уровня сигнала по одному или нескольким каналам ТИ уставок допускового контроля со времени последнего опроса данной группы. При наличии изменений в двух группах ТИ одновременно устройство указывает в сообщении ЗГТИТ номер младшей группы;
ЗГТС - при наличии со времени последнего опроса зарегистрированных изменений состояний одного или нескольких датчиков ТС или превышения уровней сигналов с датчиков ТИ уставок допускового контроля со времени последнего опроса состояний сигналов данной группы. При наличии изменений в нескольких группах одновременно устройство указывает в сообщении ЗГТС номер младшей группы.
По виду полученного от УКП сообщения УПУ принимает решение по запросу изменившейся информации. Использование УПУ команды ОТ позволяет существенно повысить скорость реакции телемеханического комплекса на изменения контролируемых объектов.
4.2.4. Функции ТУ устройства
Для обеспечения требуемой достоверности телеуправления при передаче по каналам ТЧ посылки ТУВ и ТУО дублируются УПУ с интервалом не менее 50 мс. Выбранное устройство сравнивает оба полученные сообщения и при их идентичности исполняет команду.
Для повышения надежности телеуправления коммутация тока обмотки каждого реле блока БРП со стороны УКПМ-2 производится двухсторонняя: выбором характера операции (ВКЛЮЧИТЬ/ОТКЛЮЧИТЬ), группы реле и выбором объекта в группе. Исполнительные реле располагаются матрицей 8х8. Электронные ключи выбора группы и характера операции коммутируют положительный полюс цепи питания обмоток реле, а ключи выбора объекта - отрицательный полюс. Электронные ключи снабжены цепями контроля состояния. Алгоритм исполнения УКПМ-2 команды ТУ следующий:
1) проверяется исходное состояние ключей перед включением, они должны быть в отключенном положении;
2) выдается команда включения ключа выбора группы и характера операции;
3) контролируется включенное состояние ключа выбора группы, характера операции и отключенное состояние всех остальных ключей;
4) выдается команда отключения ключа выбора группы и характера операции;
5) контролируется отключенное состояние всех ключей;
6) выдается команда включения ключа выбора объекта в группе;
7) контролируется включенное состояние ключа выбора объекта в группе и отключенное состояние всех остальных ключей;
8) выдается команда отключения ключа выбора объекта;
9) контролируется отключенное состояние всех ключей;
10) выдается команда включения ключа выбора группы, характера операции и ключа выбора объекта;
11) контролируется включенное состояние ключа выбора группы, характера операции и ключа выбора объекта в группе, а также отключенное состояние всех остальных ключей;
12) выдается квитанция в сторону УПУ об исполнении команды ТУ;
13) выдерживается задержка включенного состояния реле в течение 1...2 с;
14) выдается команда отключения ключа выбора группы и характера операции и ключа выбора объекта;
15) контролируется отключенное состояние всех ключей.
При несоответствии состояния ключей по п.п. 1), 3), 5), 7) и 9) реле не включается и квитанция УПУ не выдается. При несоответствии состояния ключей по п.п. 11) реле не включается и квитанция УПУ не выдается.
4.2.5. Функции ТРК устройства
Команда ТРК дублируется УПУ аналогично командам ТУ. После проверки идентичности командных сообщений выбранное устройство отключает выходные ключи линий ТРК и контролирует их состояния. При подтверждении отключенного состояния ключей они включаются в соответствии с кодом команды. После подтверждения в течение примерно 0,5 с состояния ключей полученному коду ТРК устройство выдает УПУ квитанцию исполнения команды ТРК. В противном случае устройство отключает ключи и квитанцию не выдает.
| УПУ| |Устройство | | ТУВ(ТУО,ТРК) | | |------------------------------------------>|-- | | |~50мс | | ТУВ(ТУО,ТРК) | | | |------------------------------------------>|-- | | | | | ТУВ(ТУО,ТРК) | | |<------------------------------------------| | | | |t V
Рис.4. Процедура обмена УПУ-КП в режимах ТУВ, ТУО, ТРК
4.2.6. Функции ЗС устройства
По запросам УПУ известительной информации (сообщение типа ЗС - запрос сообщения) устройство выдает блок информации (сообщение типа ИС - известительное сообщение) в соответствии с установленным форматом.
| УПУ| |Устройство | | Запрос информации | | |------------------------------------------>| | | | | | Информация | | |<------------------------------------------| | | | |t V
Рис.5. Процедура обмена сообщениями УПУ-УКП в режимах прямого запроса информации
4.2.7. Функция ЗМТС устройства
По запросам УПУ известительной информации по массиву ТС устройство выдает блок информации с числом групп ТС, установленным переключателем модуля МВТС устройства. Таким образом можно ограничить размер сообщения МТС числом задействованных на данном КП групп каналов ТС.
4.2.8. Функция ЗБО устройства
По запросам УПУ известительной информации по данным диагностики устройство выдает блок внутренних ошибок устройства.
4.2.9. Функция НУТИТ устройства
По команде НУТИТ производится загрузка в оперативную память устройства блока уставок допускового контроля значений по каналам ТИ. По запросам УПУ известительной информации по данным уставок устройство выдает блок текущих уставок допускового контроля значений по каналам ТИ.
5. УКАЗАНИЕ МЕР БЕЗОПАСНОСТИ
5.1. К работе с устройством допускаются лица, ознакомленные с настоящим документом, а также прошедшие инструктаж по технике безопасности при работе с электрооборудованием, питаемым напряжением 220 В.
5.2. При подключении устройства к сети электропитания первым должен подключаться провод "З" (заземление) к контуру защитного заземления.
5.3. При проведении всех видов технического обслуживания следует производить проверку электрического сопротивления изоляции между закороченными клеммами сетевого питания и выходными цепями источника питания.
6. ПОДГОТОВКА УСТРОЙСТВА К РАБОТЕ
6.1. Распаковка и расконсервация устройства
6.1.1. Расконсервацию устройства следует производить перед началом полигонной наладки или эксплуатации на объекте в помещении при температуре воздуха не ниже плюс 15 оС и относительной влажности воздуха не более 70% в присутствии представителя организации, выполняющей пуско-наладочные работы.
6.1.2. В зимнее время перед расконсервацией устройство в картонной таре необходимо выдержать в помещении при температуре не ниже 15 оС в течение не менее 36 ч. Размещение коробок рядом с источниками тепла запрещается.
6.1.3. Произведите расконсервацию каждого из блоков устройства в следующей последовательности:
1) снимите пломбу с упаковочной тары (картонной коробки);
2) вскройте тару и извлеките блок в полиэтиленовом чехле;
3) разрежьте и снимите полиэтиленовый чехол. При переконсервации чехол необходимо снять с учетом повторной заделки шва полимерной липкой лентой;
4) удалите упаковочные и консервационные материалы, мешочки с силикагелем;
5) проверьте комплектность поставки устройства в соответствии с разделом "Комплектность" паспорта.
6.2. Для сохранения гарантийных обязательств изготовителя ввод устройства в эксплуатацию, ремонт и все виды обслуживания производятся представителями организаций, осуществляющих комплексное централизованное обслуживание.
6.3. Выполните монтаж цепей датчиков на клеммах блоков БКС и БРП в соответствии с рис.6...8.
Х2 Х6 +---------------------------+ +--------------------------------+ | ЦЕПЬ |КОНТ|КОНТ| ЦЕПЬ | | ЦЕПЬ |КОНТ|КОНТ| ЦЕПЬ | |--------+----+----+--------| |----------+----+----+-----------| | ТИ1-1-1| 2 | 1 | ТИ1-1-2| | ТС1-3 | 2 | 1 | ТС1-1 | | ТИ1-0-1| 4 | 3 | ТИ1-0-2| | Гр3 | 4 | 3 | Гр1 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ2-1-1| 6 | 5 | ТИ2-1-2| | ТС2-3 | 6 | 5 | ТС2-1 | | ТИ2-0-1| 8 | 7 | ТИ2-0-2| | ТС3-3 | 8 | 7 | ТС3-1 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ3-1-1| 10 | 9 | ТИ3-1-2| | Гр3 | 10 | 9 | Гр1 | | ТИ3-0-1| 12 | 11 | ТИ3-0-2| | ТС4-3 | 12 | 11 | ТС4-1 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ4-1-1| 14 | 13 | ТИ4-1-2| | ТС5-3 | 14 | 13 | ТС5-1 | | ТИ4-0-1| 16 | 15 | ТИ4-0-2| | Гр3 | 16 | 15 | Гр1 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ5-1-1| 18 | 17 | ТИ5-1-2| | ТС6-3 | 18 | 17 | ТС6-1 | | ТИ5-0-1| 20 | 19 | ТИ5-0-2| | ТС7-3 | 20 | 19 | ТС7-1 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ6-1-1| 22 | 21 | ТИ6-1-2| | Гр3 | 22 | 21 | Гр1 | | ТИ6-0-1| 24 | 23 | ТИ6-0-2| | ТС8-3 | 24 | 23 | ТС8-1 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ7-1-1| 26 | 25 | ТИ7-1-2| | ТС1-4 | 26 | 25 | ТС1-2 | | ТИ7-0-1| 28 | 27 | ТИ7-0-2| | Гр4 | 28 | 27 | Гр2 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ8-1-1| 30 | 29 | ТИ8-1-2| | ТС2-4 | 30 | 29 | ТС2-2 | | ТИ8-0-1| 32 | 31 | ТИ8-0-2| | ТС3-4 | 32 | 31 | ТС3-2 | |--------+----+----+--------| |----------+----+----+-----------| | | 34 | 33 | | | Гр4 | 34 | 33 | Гр2 | | | 36 | 35 | | | ТС4-4 | 36 | 35 | ТС4-2 | |--------+----+----+--------| |----------+----+----+-----------| | | 38 | 37 | | | ТС5-4 | 38 | 37 | ТС5-2 | | | 40 | 39 | | | Гр4 | 40 | 39 | Гр2 | |--------+----+----+--------| |----------+----+----+-----------| | | 42 | 41 | | | ТС4-4 | 42 | 41 | ТС4-2 | | | 44 | 43 | | | ТС5-4 | 44 | 43 | ТС5-2 | |--------+----+----+--------| |----------+----+----+-----------| | | 46 | 45 | | | Гр4 | 46 | 45 | Гр2 | | | 48 | 47 | | | ТС4-4 | 48 | 47 | ТС4-2 | +---------------------------+ +--------------------------------+
Рис.6. Подключение цепей датчиков ТИ и ТС групп 1...4
Незадействованные входы ТИ должны быть закорочены с проводниками цепей ТИХ-0-Х на клеммной колодке X2 БКС.
Х2 Х6 +---------------------------+ +--------------------------------+ | ЦЕПЬ |КОНТ|КОНТ| ЦЕПЬ | | ЦЕПЬ |КОНТ|КОНТ| ЦЕПЬ | |--------+----+----+--------| |----------+----+----+-----------| | ТИ1-1-1| 2 | 1 | ТИ1-1-2| | ТС1-3 | 2 | 1 | ТС1-1 | | ТИ1-0-1| 4 | 3 | ТИ1-0-2| | Гр3 | 4 | 3 | Гр1 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ2-1-1| 6 | 5 | ТИ2-1-2| | ТС2-3 | 6 | 5 | ТС2-1 | | ТИ2-0-1| 8 | 7 | ТИ2-0-2| | ТС3-3 | 8 | 7 | ТС3-1 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ3-1-1| 10 | 9 | ТИ3-1-2| | Гр3 | 10 | 9 | Гр1 | | ТИ3-0-1| 12 | 11 | ТИ3-0-2| | ТС4-3 | 12 | 11 | ТС4-1 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ4-1-1| 14 | 13 | ТИ4-1-2| | ТС5-3 | 14 | 13 | ТС5-1 | | ТИ4-0-1| 16 | 15 | ТИ4-0-2| | Гр3 | 16 | 15 | Гр1 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ5-1-1| 18 | 17 | ТИ5-1-2| | ТС6-3 | 18 | 17 | ТС6-1 | | ТИ5-0-1| 20 | 19 | ТИ5-0-2| | ТС7-3 | 20 | 19 | ТС7-1 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ6-1-1| 22 | 21 | ТИ6-1-2| | Гр3 | 22 | 21 | Гр1 | | ТИ6-0-1| 24 | 23 | ТИ6-0-2| | ТС8-3 | 24 | 23 | ТС8-1 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ7-1-1| 26 | 25 | ТИ7-1-2| | ТС1-4 | 26 | 25 | ТС1-2 | | ТИ7-0-1| 28 | 27 | ТИ7-0-2| | Гр4 | 28 | 27 | Гр2 | |--------+----+----+--------| |----------+----+----+-----------| | ТИ8-1-1| 30 | 29 | ТИ8-1-2| | ТС2-4 | 30 | 29 | ТС2-2 | | ТИ8-0-1| 32 | 31 | ТИ8-0-2| | ТС3-4 | 32 | 31 | ТС3-2 | |--------+----+----+--------| |----------+----+----+-----------| | | 34 | 33 | | | Гр4 | 34 | 33 | Гр2 | | | 36 | 35 | | | ТС4-4 | 36 | 35 | ТС4-2 | |--------+----+----+--------| |----------+----+----+-----------| | | 38 | 37 | | | ТС5-4 | 38 | 37 | ТС5-2 | | | 40 | 39 | | | Гр4 | 40 | 39 | Гр2 | |--------+----+----+--------| |----------+----+----+-----------| | | 42 | 41 | | | ТС4-4 | 42 | 41 | ТС4-2 | | | 44 | 43 | | | ТС5-4 | 44 | 43 | ТС5-2 | |--------+----+----+--------| |----------+----+----+-----------| | | 46 | 45 | | | Гр4 | 46 | 45 | Гр2 | | | 48 | 47 | | | ТС4-4 | 48 | 47 | ТС4-2 | +---------------------------+ +--------------------------------+
Рис. 7. Подключение цепей датчиков ТС групп 5...8 и ТИИ
Х7 Х4 +--------------------------------+ +------------------------+ | ЦЕПЬ |КОНТ|КОНТ| ЦЕПЬ | | ЦЕПЬ |КОНТ| |----------+----+----+-----------| |-------------------+----| | ТС1-7 | 2 | 1 | ТС1-5 | | ТРК1 | 2 | | Гр7 | 4 | 3 | Гр5 | | Общий (ТИИ1-0) | 4 | |----------+----+----+-----------| |-------------------+----| | ТС2-7 | 6 | 5 | ТС2-5 | | ТРК2 (ТИИ1-1) | 6 | | ТС3-7 | 8 | 7 | ТС3-5 | | ТРК3 | 8 | |----------+----+----+-----------| |-------------------+----| | Гр7 | 10 | 9 | Гр5 | | Общий (ТИИ2-0) | 10 | | ТС4-7 | 12 | 11 | ТС4-5 | | ТРК4 (ТИИ2-1) | 12 | |----------+----+----+-----------| |-------------------+----| | ТС5-7 | 14 | 13 | ТС5-5 | | ТРК5 | 14 | | Гр7 | 16 | 15 | Гр5 | | Общий (ТИИ3-0) | 16 | |----------+----+----+-----------| |-------------------+----| | ТС6-7 | 18 | 17 | ТС6-5 | | ТРК6 (ТИИ3-1) | 18 | | ТС7-7 | 20 | 19 | ТС7-5 | | ТРК7 | 20 | |----------+----+----+-----------| |-------------------+----| | Гр7 | 22 | 21 | Гр5 | | Общий (ТИИ4-0) | 22 | | ТС8-7 | 24 | 23 | ТС8-5 | | ТРК8 (ТИИ4-1) | 24 | |----------+----+----+-----------| |-------------------+----| | ТС1-8 | 26 | 25 | ТС1-6 | | ТРК9 | 26 | | Гр8 | 28 | 27 | Гр6 | | Общий (ТИИ5-0) | 28 | |----------+----+----+-----------| |-------------------+----| | ТС2-8 | 30 | 29 | ТС2-6 | | ТРК10 (ТИИ5-1) | 30 | | ТС3-8 | 32 | 31 | ТС3-6 | | ТРК11 | 32 | |----------+----+----+-----------| |-------------------+----| | Гр8 | 34 | 33 | Гр6 | | Общий (ТИИ6-0) | 34 | | ТС4-8 | 36 | 35 | ТС4-6 | | ТРК12 (ТИИ6-1) | 36 | |----------+----+----+-----------| |-------------------+----| | ТС5-8 | 38 | 37 | ТС5-6 | | ТРК13 | 38 | | Гр8 | 40 | 39 | Гр6 | | Общий (ТИИ7-0) | 40 | |----------+----+----+-----------| |-------------------+----| | ТС4-8 | 42 | 41 | ТС4-6 | | ТРК14 (ТИИ7-1) | 42 | | ТС5-8 | 44 | 43 | ТС5-6 | | ТРК15 | 44 | |----------+----+----+-----------| |-------------------+----| | Гр8 | 46 | 45 | Гр6 | | Общий (ТИИ8-0) | 46 | | ТС4-8 | 48 | 47 | ТС4-6 | | ТРК16 (ТИИ8-1) | 48 | +--------------------------------+ +------------------------+
Рис.8. Условные обозначения сигналов
6.4. Подключите к разъемам блока КПМ-1 (КПМ-2) розетки жгутов блоков БКС и БРП соблюдая маркировку розеток.
6.5. Произведите монтаж линии канала ТЧ на розетке разъема ЛИНИЯ" контроллера КТМС из состава УКПМ-2. Назначение контактов разъема "ЛИНИЯ" КТМС для подключения к каналу ТЧ приведено на рис. 9.
Для работы по радиоканалу линии канала ТЧ КТМС подключаются вместо микротелефонной трубки радиостанции, а для управления режимами радиостанции используются контакты реле КТМС согласно рис. 9.
Двухпроводное присоединение устройств (к физической линии связи или двухпроводному окончанию устройства связи) обеспечивается параллельным соединением (непосредственно или через дифференциальные трансформаторы) входа с выходом канала ТЧ.
6.6. С применением осциллографа отрегулируйте уровень сигнала ТЧ на выходе канального передатчика устройства таким образом, чтобы на входе канального приемника устройства уровень находился в диапазоне от минус 30 до минус 10 Дб.
.G.D:\UWTK\KTMS.PCX;10.892 cm;9.954 cm;PCX Рис. 9. Назначение контактов разъема "ЛИНИЯ" КТМС (УКПМ-2)
6.7. На розетках-заглушках "АДРЕС" контроллеров КТМС блока КПМ-2 установите перемычками (методом пайки) адрес устройства на канале ТЧ в соответствии с табл.3.
Таблица 3 Задание адреса устройства на линии ТЧ
+-----------------------------------------------------------------+ | Адрес | Наличие перемычек между контактами разъема "АДРЕС" | | устройства | модуля КТМС | |------------+----------------------------------------------------| | HEX | DEC | 5 и 3 | 5 и 4 | 5 и 7 | 5 и 8 | 5 и 2 | 5 и 1| |-----+------+--------+--------+--------+--------+--------+-------| | 00 | 0 | есть | есть | есть | есть | есть | есть | | 01 | 1 | есть | есть | есть | есть | есть | нет | | 02 | 2 | есть | есть | есть | есть | нет | есть | | 03 | 3 | есть | есть | есть | есть | нет | нет | | 04 | 4 | есть | есть | есть | нет | есть | есть | | 05 | 5 | есть | есть | есть | нет | есть | нет | | 06 | 6 | есть | есть | есть | нет | нет | есть | | 07 | 7 | есть | есть | есть | нет | нет | нет | | 08 | 8 | есть | есть | нет | есть | есть | есть | | 09 | 9 | есть | есть | нет | есть | есть | нет | | 0A | 10 | есть | есть | нет | есть | нет | есть | | 0B | 11 | есть | есть | нет | есть | нет | нет | | 0C | 12 | есть | есть | нет | нет | есть | есть | +-----------------------------------------------------------------+
Продолжение таблицы 3 Задание адреса устройства на линии ТЧ
+-----------------------------------------------------------------+ | Адрес | Наличие перемычек между контактами разъема "АДРЕС" | | устройства | модуля КТМС | |------------+----------------------------------------------------| | HEX | DEC | 5 и 3 | 5 и 4 | 5 и 7 | 5 и 8 | 5 и 2 | 5 и 1| |-----+------+--------+--------+--------+--------+--------+-------| | 0D | 13 | есть | есть | нет | нет | есть | нет | | 0E | 14 | есть | есть | нет | нет | нет | есть | | 0F | 15 | есть | есть | нет | нет | нет | нет | | 10 | 16 | есть | нет | есть | есть | есть | есть | | 11 | 17 | есть | нет | есть | есть | есть | нет | | 12 | 18 | есть | нет | есть | есть | нет | есть | | 13 | 19 | есть | нет | есть | есть | нет | нет | | 14 | 20 | есть | нет | есть | нет | есть | есть | | 15 | 21 | есть | нет | есть | нет | есть | нет | | 16 | 22 | есть | нет | есть | нет | нет | есть | | 17 | 23 | есть | нет | есть | нет | нет | нет | | 18 | 24 | есть | нет | нет | есть | есть | есть | | 19 | 25 | есть | нет | нет | есть | есть | нет | | 1A | 26 | есть | нет | нет | есть | нет | есть | | 1B | 27 | есть | нет | нет | есть | нет | нет | | 1C | 28 | есть | нет | нет | нет | есть | есть | | 1D | 29 | есть | нет | нет | нет | есть | нет | | 1E | 30 | есть | нет | нет | нет | нет | есть | | 1F | 31 | есть | нет | нет | нет | нет | нет | +-----------------------------------------------------------------+
6.8. Розетки-заглушки "АДРЕС" сочлените с соответствующими
вилками модулей КТМС блока КПМ с маркировкой "АДРЕС".
6.9. Присоедините заземляющий проводник сетевого шнура к контуру защитного заземления.
6.10. Убедитесь в том, что тумблеры "220V" и "24V" на лицевой панели БП КПМ-1 (КПМ-2) находятся в отключенном положении.
6.11. Присоедините, при необходимости, источник резервного питания напряжением 24 В постоянного тока к клеммной колодке БП устройства согласно маркировке;
6.12. Подключите вилку сетевого шнура КПМ-1 (КПМ-2) к розетке однофазной сети переменного тока номинальным напряжением 220 В частотой 50 Гц.
6.13. Присоедините к разъему "ЛИНИЯ" контроллера КТМС линию связи с УПУ.
6.14. Переведите тумблеры "220V" (и "24V" при необходимости) на лицевой панели БП КПМ в положение "ВКЛ".
6.15. Произведите проверку работоспособности КПМ-1 (КПМ-2): индикатор "РБТ" на лицевой панели блока КПМ-1 (КПМ-2) должен мигать.
7. ХАРАКТЕРНЫЕ НЕИСПРАВНОСТИ И СПОСОБЫ ИХ УСТРАНЕНИЯ
7.1. Перечень неисправностей, вероятные причины появления и способы их устранения приведены в табл. 4.
Таблица 4
+---------------------------------------------------------------+ | | | | | Характерные неисправности, | Вероятная | Способ | | внешние проявления и допол- | причина | устранения | | нительные признаки | | | |-------------------------------+----------------+--------------| | | | | | 1. При включении тумблера | обрыв цепи | устранить | |"СЕТЬ" отсутствует свечение | шнура питания,| обрыв, | |всех индикаторов на лицевой | неисправен | заменить | |плоскости КПМ | предохранитель| предохра- | | | | нитель | | | | | | 2. При включении тумблера | неисправен БП | заменить | |"СЕТЬ" отсутствует свечение ин-| | БП | |дикатора выходного напряжения | | | |БП КПМ | | | | | | | | 3. При включении тумблера | неисправен | Заменить | |"СЕТЬ" отсутствует свечение ин-| контроллер | контрол- | |дикатора на лицевой панели кон-| (модуль) | лер (мо- | |троллера (модуля) | | дуль) | | | | | | 4. При включении тумблера |1. неисправен | Заменить | |"СЕТЬ" отсутствует мигание ин- |контроллер КУКП | контроллер | |дикатора "РБТ" на лицевой па- | | КУКП | |нели КУКП |2. неисправен | Заменить | | |контроллер КТМС | контроллер | | | | КТМС | | |3. неисправен | Заменить | | |модуль МВТС | модуль МВТС | | |4. неисправен | Заменить | | |модуль МВТУ | модуль МВТУ | | |5. неисправен | Заменить | | |модуль МВИС | модуль МВИС | +---------------------------------------------------------------+
8. ТЕХНИЧЕСКОЕ ОБСЛУЖИВАНИЕ УСТРОЙСТВА
8.1. Виды и периодичность технического обслуживания устройства приведены в табл. 5.
Таблица 5
+----------------------------------------------------------------+ | Виды технического обслуживания | Периодичность | |---------------------------------------+------------------------| | 1.Профилактический осмотр, чистка | | | и промывка контактов | 1 раз в 6 месяцев | | 2.Проверка технического состояния | 1 раз в год | +----------------------------------------------------------------+
Примечание. Расход спирта-ректификата для одноразового выполнения чистки и промывки контактов- 0,15 л, марли - 0,2 м2.
8.2. Ремонт и все виды технического обслуживания для сохранения гарантийных обязательств изготовителя должны производиться представителями организаций, осуществляющих комплексное централизованное обслуживание.
9. МАРКИРОВАНИЕ И ПЛОМБИРОВАНИЕ
9.1. На лицевых панелях блоков (модулей и контроллеров), входящих в КПМ-1 (КПМ-2) устройства, на верхней площадке наклеивается этикетка с обозначением блока (модуля) и товарным знаком предприятия - изготовителя.
9.2. На упаковочной таре устройства наносятся надписи: наименование устройства и заводской номер.
9.3. На транспортной таре наносятся надписи: место назначения и получатель, масса, отправитель, предупредительные знаки:
ОСТОРОЖНО, ХРУПКОЕ, БОИТСЯ СЫРОСТИ, ВЕРХ, НЕ КАНТОВАТЬ.
10. УПАКОВКА
10.1. Составные части устройства с отключенными от УКПМ кабелями запаиваются в полиэтиленовые пакеты с вложенными в них мешочками с селикагелем и укладываются в отдельные картонные коробки. В те же коробки укладывается комплект ЗИП и принадлежностей, а также комплект эксплуатационных документов.
10.2. В коробку вкладывается упаковочный лист, содержащий следующие сведения: товарный знак завода-изготовителя; обозначение устройства; год и месяц выпуска; дата упаковки; подпись или штамп ответственного за упаковку контролера ОТК.
11. ПРАВИЛА ТРАНСПОРТИРОВАНИЯ И ХРАНЕНИЯ
11.1. Устройства должны транспортироваться всеми видами транспорта в закрытых транспортных средствах (автомобильным, железнодорожным, водным - в трюмах, в самолетах).
11.2. Во время проведения погрузочно-разгрузочных работ и транспортирования ящики с устройствами не должны подвергаться ударам и воздействию атмосферных осадков.
11.3. Условия транспортирования:
температура окружающего воздуха от минус 60 до плюс 70 оC при относительной влажности от 5 до 100 %. Допускается транспортирование устройств в контейнерах и пакетами. Средства пакетирования - по ГОСТ 24597-81.
При железнодорожных перевозках допускаются мелкие малотонажные и повагонные виды отправок в зависимости от заказа-наряда.
11.4. Хранить устройства следует в соответствии с требованиями ГОСТ 12997-84 в закрытых отапливаемых помещениях в условиях 1 по ГОСТ 15150-69.
Приложение
ЦЕПИ ВНЕШНИХ ПОДКЛЮЧЕНИЙ БРП
X3 X4 X5 X6 +--------------+ +--------------+ +--------------+ +--------------+ | ЦЕПЬ |КОНТ| | ЦЕПЬ |КОНТ| | ЦЕПЬ |КОНТ| | ЦЕПЬ |КОНТ| +---------+----+ +---------+----+ +---------+----+ +---------+----+ |ТУВ1-НР1Д| 1 | |ТУВ2-НР1Д| 1 | |ТУВ3-НР1Д| 1 | |ТУВ4-НР1Д| 1 | |ТУВ1-Ц1Д | 2 | |ТУВ2-Ц1Д | 2 | |ТУВ3-Ц1Д | 2 | |ТУВ4-Ц1Д | 2 | |---------+----| |---------+----| |---------+----| |---------+----| |ТУВ1-НР2 | 3 | |ТУВ2-НР2 | 3 | |ТУВ3-НР2 | 3 | |ТУВ4-НР2 | 3 | |ТУВ1-Ц2 | 4 | |ТУВ2-Ц2 | 4 | |ТУВ3-Ц2 | 4 | |ТУВ4-Ц2 | 4 | |---------+----| |---------+----| |---------+----| |---------+----| |ТУВ1-НР3 | 5 | |ТУВ2-НР3 | 5 | |ТУВ3-НР3 | 5 | |ТУВ4-НР3 | 5 | |ТУВ1-Ц3 | 6 | |ТУВ2-Ц3 | 6 | |ТУВ3-Ц3 | 6 | |ТУВ4-Ц3 | 6 | +---------+----+ +---------+----+ +---------+----+ +---------+----+ |ТУО1-НР1Д| 7 | |ТУО2-НР1Д| 7 | |ТУО3-НР1Д| 7 | |ТУО4-НР1Д| 7 | |ТУО1-Ц1Д | 8 | |ТУО2-Ц1Д | 8 | |ТУО3-Ц1Д | 8 | |ТУО4-Ц1Д | 8 | |---------+----| |---------+----| |---------+----| |---------+----| |ТУО1-НЗ2 | 9 | |ТУО2-НЗ2 | 9 | |ТУО3-НЗ2 | 9 | |ТУО4-НЗ2 | 9 | |ТУО1-Ц2 | 10 | |ТУО2-Ц2 | 10 | |ТУО3-Ц2 | 10 | |ТУО4-Ц2 | 10 | |ТУО1-НР2 | 11 | |ТУО2-НР2 | 11 | |ТУО3-НР2 | 11 | |ТУО4-НР2 | 11 | +--------------+ +--------------+ +--------------+ +--------------+ X7 X8 X9 X10 +--------------+ +--------------+ +--------------+ +--------------+ | ЦЕПЬ |КОНТ| | ЦЕПЬ |КОНТ| | ЦЕПЬ |КОНТ| | ЦЕПЬ |КОНТ| +---------+----+ +---------+----+ +---------+----+ +---------+----+ |ТУВ5-НР1Д| 1 | |ТУВ6-НР1Д| 1 | |ТУВ7-НР1Д| 1 | |ТУВ8-НР1Д| 1 | |ТУВ5-Ц1Д | 2 | |ТУВ6-Ц1Д | 2 | |ТУВ7-Ц1Д | 2 | |ТУВ8-Ц1Д | 2 | |---------+----| |---------+----| |---------+----| |---------+----| |ТУВ5-НР2 | 3 | |ТУВ6-НР2 | 3 | |ТУВ7-НР2 | 3 | |ТУВ8-НР2 | 3 | |ТУВ5-Ц2 | 4 | |ТУВ6-Ц2 | 4 | |ТУВ7-Ц2 | 4 | |ТУВ8-Ц2 | 4 | |---------+----| |---------+----| |---------+----| |---------+----| |ТУВ5-НР3 | 5 | |ТУВ6-НР3 | 5 | |ТУВ7-НР3 | 5 | |ТУВ8-НР3 | 5 | |ТУВ5-Ц3 | 6 | |ТУВ6-Ц3 | 6 | |ТУВ7-Ц3 | 6 | |ТУВ8-Ц3 | 6 | +---------+----+ +---------+----+ +---------+----+ +---------+----+ |ТУО5-НР1Д| 7 | |ТУО6-НР1Д| 7 | |ТУО7-НР1Д| 7 | |ТУО8-НР1Д| 7 | |ТУО5-Ц1Д | 8 | |ТУО6-Ц1Д | 8 | |ТУО7-Ц1Д | 8 | |ТУО8-Ц1Д | 8 | |---------+----| |---------+----| |---------+----| |---------+----| |ТУО5-НЗ2 | 9 | |ТУО6-НЗ2 | 9 | |ТУО7-НЗ2 | 9 | |ТУО8-НЗ2 | 9 | |ТУО5-Ц2 | 10 | |ТУО6-Ц2 | 10 | |ТУО7-Ц2 | 10 | |ТУО8-Ц2 | 10 | |ТУО5-НР2 | 11 | |ТУО6-НР2 | 11 | |ТУО7-НР2 | 11 | |ТУО8-НР2 | 11 | +--------------+ +--------------+ +--------------+ +--------------+
Примечание: Двойными линиями разделены контакты разных реле (команд), одинарными - контакты различных групп одного реле.
Продолжение приложения
+------------+ |ТУх|Х-ХХ|Х|Д| +------------+-----------------------------------------------------+ | | | | +|Две последовательно включенные группы контактов | | | | | |-----------------------------------------------------| | | | +--|Номер контактной группы реле | | | | |-----------------------------------------------------| | | +----|НР - один из нормально разомкнутых контактов группы | | | |НЗ - один из нормально замкнутых контактов группы | | | |Ц - центральный контакт коммутационной группы | | | |-----------------------------------------------------| | +-------|Номер канала телеуправления | | |-----------------------------------------------------| +-----------|ТУВ - телеуправление включением объекта | |ТУО - телеуправление отключением объекта | +-----------------------------------------------------+
Рис. 1. Обозначения условные сигналов ТУ
.G.D:\UWTK\BRP.PCX;13.367 cm;12.407 cm;PCX Рис. 2. Габаритный чертеж блока БРП
Акционерное общество "ЮГ-СИСТЕМА"
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ ОКП 42 3295
УСТРОЙСТВО КОНТРОЛИРУЕМОГО ПУНКТА МАЛОГАБАРИТНОЕ УКПМ-2 Техническое описание 3.785.003 ТО
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
1. ВВЕДЕНИЕ
1.1. Настоящий документ предназначен для изучения устройства контролируемого пункта малогабаритного УКПМ-2 ( далее - устройство).
1.2. При изучении устройства следует дополнительно руководствоваться приложением к настоящему документу 3.785.003 ТО1.
1.3. Принятые в ТО условные сокращения и обозначения: АП - адрес телемеханического контролируемого пункта; БКС - блок клеммных соединителей; БПКП - блок питания устройства; БРП - блок реле повторителей; ЗТ - запрос требования на обслуживание; КПМ - аппаратный блок устройства; КТМС - контроллер телемеханической связи; КУКП-М - контроллер ввода-вывода устройства; МВТС - модуль ввода сигналов ТС; МВТУ - модуль вывода сигналов ТУ; МВИС - модуль ввода сигналов ТИИ (импульсных); ОТ - опрос требований на обслуживание; ТЧ - сигнал тональной частоты, используемый для передачи/приема телеинформации по каналам связи; ТИТ - телеизмерение текущих значений параметров; ТИИ - телеизмерение интегральных значений параметров; УПУ - устройство пункта управления. D27:20 - вывод 20 микросхемы D27; D27.2 - 2-й элемент микросхемы D27.
Остальные термины и определения соответствуют ГОСТ 26.005-82 или общепринятым в технической литературе.
2. НАЗНАЧЕНИЕ
2.1. Устройство входит в состав комплекта программно-аппаратных средств телемеханики КОМПАС ТМ 1.1, предназначенного для построения телемеханических комплексов. Телемеханические комплексы, в свою очередь, предназначены для применения в автоматизированных системах управления объектами энергетики, нефтяной, газовой промышленностей и других объектов народного хозяйства.
2.2. Конструктивно устройство состоит из двух блоков: КПМ и БКС. Блоки БКС могут отличаться конструкцией корпусов из-за возможной замены материалов.
2.3. Устройство относится к восстанавливаемым многофункциональным изделиям.
2.4. По защищенности от воздействий окружающей среды устройство относится к обыкновенному исполнению по ГОСТ 12997-84.
2.5. По устойчивости к воздействию температуры и влажности окружающего воздуха устройство соответствует группе C2 по ГОСТ 26.205-88, но для работы при температуре от минус 40 до плюс 70 оC.
2.6. По устойчивости к воздействию атмосферного давления устройство соответствует группе P1 по ГОСТ 12997-84.
2.7. Устройство предназначено для выполнения следующих функций:
ввод сигналов двухпозиционных датчиков (ТС);
ввод сигналов текущих значений параметров (ТИТ);
вывод сигналов телеуправления двухпозиционными объектами (ТУ);
ввод сигналов интегральных значений параметров (ТИИ);
обмен телеинформацией с УПУ в режиме телепередачи по запросу.
3. ТЕХНИЧЕСКИЕ ДАННЫЕ
3.1. Информационная емкость устройств по функциям: ТИТ - 16 каналов измерения значений аналоговых сигналов; ТС - 64 каналов контроля состояний двухпозиционных объектов; ТУ - 32 каналов управления двухпозиционными объектами; ТИИ - 8 каналов ввода импульсных сигналов.
3.2. Питание устройства осуществляется от сети переменного тока напряжением (220+33-44) В, частотой (50 + 2,5) Гц или от источника постоянного тока напряжением (27+4-2) В.
3.3. Мощность, потребляемая устройством от источника переменного и постоянного тока, не более 30 ВА.
3.4. Характеристики каналов
3.4.1. Характеристики каналов телеизмерений текущих значений параметров (ТИТ) устройства
3.4.1.1. Выходные сигналы датчиков ТИТ должны быть представлены:
1) величиной напряжения постоянного тока в диапазоне: от минус 10 до плюс 10 В;
2) величиной постоянного тока в диапазонах: от минус 10 до плюс 10 мА; от минус 40 до плюс 40 мА.
3.4.1.2. Предел допускаемого значения основной приведенной погрешности преобразования сигналов токовых датчиков в код и класс точности преобразования - 0,25%.
3.4.1.3. Предел допускаемых значений дополнительной приведенной погрешности преобразования сигналов токовых датчиков в код, вызываемой воздействием каждого из факторов: изменением напряжения питания, изменением частоты питающего напряжения, изменением температуры окружающего воздуха на каждые 10 оC, не более половины предела основной приведенной погрешности.
3.4.2. Характеристики каналов телесигнализации (ТС) устройства
3.4.2.1. Устройство обеспечивает работу с датчиками ТС контактного и бесконтактного типов.
Для контактных датчиков сопротивление контакта должно быть: замкнутого состояния контакта - не более 200 Ом вместе с подводящими проводами; разомкнутого состояния контакта - не менее 200 кОм.
Для бесконтактных датчиков состояние ВКЛЮЧЕНО должно быть представлено уровнем напряжения постоянного тока от 0 до 1,0 В, состояние ОТКЛЮЧЕНО - от 19,2 до 28,8 В.
3.4.2.2. Для исключения влияния помех на проводники цепей ТС предусмотрена возможность фильтрации быстрых изменений состояний ТС. При программировании УФППЗУ может быть установлен параметр, определяющий минимальное (контрольное) число внутренних циклов обмена КТМС-КУКП с изменившимся состоянием, когда состояние канала ТС считается установившимся. Длительность внутреннего цикла обмена КТМС- КУКП составляет около 300 мс. Значение устанавливаемого параметра может быть от 1 до 254.
3.4.3. Характеристики каналов телеуправления устройства
3.4.3.1. Выходные элементы каналов телеуправления устройства обеспечивают в течение (1 ... 1,5) с выдачу тока величиной не менее 80 мА на активной нагрузке сопротивлением 240 Ом. Нагрузкой каналов телеуправления устройства служат обмотки внешних реле-повторителей (блоков типа БРП-1), соединенных в матрицу 8х8. Для каждого из объектов управления предназначена пара каналов управления (реле- повторителей): "ВКЛЮЧИТЬ ОБЪЕКТ" и "ОТКЛЮЧИТЬ ОБЪЕКТ". Выдача токового сигнала для каждого из реле обеспечивается двумя электронными ключами, коммутирующими каждый из полюсов внутреннего источника постоянного тока напряжением 24 В. Алгоритм управления электронными ключами предусматривает контроль за их состоянием и исключает возможность выдачи ложного сигнала управления при одиночных неисправностях элементов устройства.
3.4.4. Характеристики каналов телеизмерений интегральных значений параметров устройства
3.4.4.1. Устройство обеспечивает работу с импульсными датчиками типов ДТИИ (из номенклатуры КОМПАС ТМ 1.1), Е440, Е870 и им подобным.
Выходные сигналы датчика должны быть представлены чередующимися состояниями ИМПУЛЬС-ПАУЗА, причем: ПАУЗА должна быть представлена остаточным током датчика не более 1 мА при питающем напряжении 12 В; ИМПУЛЬС должен быть представлен током не менее 8 мА при питающем напряжении 12 В и внутреннем сопротивлении источника 1 кОм.
Длительности ИМПУЛЬСА и ПАУЗЫ должны быть не менее 10 мс, частота следования ИМПУЛЬСОВ не должна превышать 50 Гц.
3.4.4.2. Емкость канальных счетчиков - 65535 импульсов.
3.4.5. Характеристики канала ТЧ устройства
3.4.5.1. Устройство обеспечивает передачу и прием сообщений по некоммутируемым каналам связи по ГОСТ 25007-81: 1) с двух- или четырехпроводным окончанием; 2) радиоканалам с полудуплексным каналом; 3) физическим двух- или четырехпроводным линиям связи.
3.4.5.2. Вид модуляции передаваемых сообщений между устройством и УПУ - частотная модуляция. Развязка канала ТЧ устройств - трансформаторная, раздельно по входу и выходу.
3.4.5.3. Характеристические частоты обмена информации по каналам ТЧ могут установлены: "логический нуль" - 2571 Гц; "логическая единица" - 2717 Гц. Отклонения установленных характеристических частот не превышают + 1 Гц.
Значения краевых частот полосы пропускания входного фильтра приемника установлены: нижнее значение: 2425 Гц; верхнее значение: 3244 Гц.
Коэффициент ослабления полосового фильтра в полосе задерживания на частоте 728 Гц не менее 50 Дб и на частоте 9732 Гц не менее 41 Дб.
По карте заказа при поставке устройства могут быть установлены иные значения характеристических частот и, соответственно, краевых частот полосы пропускания входного фильтра.
3.4.5.4. Уровень сигнала ТЧ на выходе канального передатчика регулируется в диапазоне от минус 28 до 0 Дб (от 30 мВ до 0,775 В). Чувствительность приемника ТЧ - не хуже минус 30 Дб.
3.4.5.5. Выходной импеданс передатчиков ТЧ - (600 + 60) Ом. Входной импеданс приемников ТЧ - (600 + 60) Ом в диапазоне частот от 300 до 3400 Гц.
3.4.5.6. Скорость обмена телеинформацией между УПУ и УКПМ может быть установлена любой из ряда: 50, 100, 200, 300, 600 Бод. Установка скорости обмена выполняется программированием УФППЗУ контроллера КТМС.
3.5. Массо-габаритные характеристики устройства
3.5.1. Масса устройства: блок КПМ-1 (КПМ-2) - не более 6 кг; блок БКС - не более 8 кг.
3.5.2. Габаритные размеры устройства: блок КПМ-1 (КПМ-2) - 300х275х280 мм; блок БКС - 495х380х90 мм.
3.6. Климатические характеристики устройства
3.6.1. Устройство в процессе эксплуатации устойчиво к воздействию температуры от минус 40 до плюс 70 оC при максимальной скорости изменения температуры 20 оC/ч.
3.6.2. Устройство в процессе эксплуатации устойчиво к воздействию относительной влажности от 5 до 100 % без конденсации влаги.
3.6.3. Устройство в транспортной таре выдерживает температуру от минус 50 до плюс 70 оC при максимальной скорости изменения температуры 20 оC/ч.
3.6.4. Устройство в транспортной таре выдерживает воздействие относительной влажности (95 + 3) % при температуре плюс 35 оC.
3.7. Устройство устойчиво к воздействию синусоидальных вибраций в диапазоне частот от 5 до 25 Гц, действующих последовательно вдоль трех взаимно перпендикулярных осей, с амплитудой смещения для частоты ниже частоты перехода 0,1 мм (частота перехода выбирается от 57 до 62 Гц).
4. СОСТАВ УСТРОЙСТВА
4.1. Конструкция устройства
Устройство состоит из конструктивно обособленных и функционально законченных блоков: КПМ-2 и БКС-М.
4.1.1. Блок КПМ-2 имеет модульную конструкцию и содержит фукциональные элементы - модули и контроллеры (далее - элементы): БПКП-М, КТМС-М, КУКП-М, МВТС-М, МВИС-М и МВТУ-М. Каждый элемент выполнен на печатной плате, размещенной в индивидуальном пластмассовом кожухе.
На лицевых панелях элементов расположены индикаторы и присоединительные разъемы для подключения жгутов связи с БКС-М, БРП-1 и каналом ЧМ. С тыльной стороны элементы оснащены разъемами для подключения к магистрали информационного межэлементного обмена.
Элементы укрепляются на вертикально расположенном шасси, обеспечивающем их механическое крепление и электрическую связь. В нижней части элементы имеют специальные кронштейны для зацепления за элементы шасси, а в верхней части крепятся винтом. В передней части блока КПМ-2 элементы охватываются рамкой, к нижней части которой крепится кабеледержатель.
4.1.2. БКС-М предназначен для обеспечения монтажа цепей датчиков ТИТ, ТС и ТИИ на объекте. Соединения цепей датчиков выполняются на 48-ми контактных клеммных колодках, обеспечивающих монтаж оголенных (без облуживания) проводников с сечением жил до 2,5 мм2. Назначение контактов клеммных колодок приведено в приложении 1.
БКС-М предназначен для установки в непосредственной близости от блока КПМ-2. Длина штатных жгутов БКС-М для подключения к КПМ-2 не более 800 мм. Габаритный чертеж блока КПМ-2 приведен в приложении 3.785.003 ТО1.
Для механического крепления проводников (кабелей) цепей датчиков конструкцией БКС-М предусмотрены кабельные зажимы. Вывод проводников (кабелей) может производиться на три стороны. Клеммные колодки закрываются крышкой. Крепление крышки обеспечивает возможность ее опломбирования. Для подключения к контуру защитного заземления в нижней части корпуса БКС-М предусмотрен зажим под винт М5. Габаритный чертеж блока БКС-М приведен в приложении 3.785.003 ТО1.
4.2. Обмен устройства с УПУ
4.2.1. Устройство обменивается с УПУ телемеханическими сообщениями (далее - сообщения) по запросу УПУ. Функционально сообщения различаются на:
команды УПУ: опрос требования устройства на обслуживание (ОТ), телеуправление включением (ТУВ), телеуправление отключением(ТУО), настройка уставок ТИТ (НУТИТ);
запросы УПУ: запрос группы ТС (ЗГТС), запрос группы ТИТ (ЗГТИТ), запрос массива ТС (ЗМТС), запрос группы ТИИ без сброса (ЗГТИИ1), запрос группы ТИИ со сбросом (ЗГТИИ2), запрос значений уставок ТИТ текущих значений (ЗУТИТ) запрос блока ошибок оборудования (ЗБО);
известительные сообщения УКПМ-2:
данные группы ТС (ГТС), данные массива ТС (МТС), данные группы ТИТ (ГТИТ), данные группы ТИИ без сброса (ГТИИ1), данные группы ТИИ со сбросом (ГТИИ2), значения уставок ТИТ (УТИТ).
Выполняемыми устройством функциями считаются процедуры обработки устройством команд и запросов УПУ.
4.2.2. Структура телемеханических сообщений
Структура сообщений в общем виде представлена на рис. 1. Все коды в сообщении устанавливаются в положительной логике.
+-------------------------------------------------------------+ | Лидер | Адрес | Код | Номер |Данные| Конец |Байт защиты| | | УКП |функции| канала | |сообщения| сообщения | +-------------------------------------------------------------+
Рис. 1. Общая структура телемеханических сообщений
Лидер, возглавляющий сообщение, представляет собой нулевой байт, предназначенный для настройки передатчика и приемника канала ТЧ, а также для реализации временной задержки для включения шумоподавителя радиостанции. Длительность лидера устанавливается на предприятии-изготовителе равной 8-ми битовым интервалам и может быть изменена пользователем программированием УФППЗУ.
Адрес УКП передается одним байтом (далее - байт АП) с битом защиты по паритету (нечетность). Дополнительно байт АП содержит в двух старших разрядах единицы - признак начала информационной части сообщения. По признаку старта посылки производится побитная синхронизация приема сообщения кварцевым генератором.
Код функции передается одним байтом (далее - байт KФ) с разрядом защиты по паритету (нечетность).
Номер канала передается одним байтом номера группы (далее - байт НГ) с разрядом защиты по паритету (нечетность).
Данные сообщения передаются побайтно с дополнением разрядом защиты по паритету (нечетность).
Конец сообщения передается одним байтом с дополнительным разрядом защиты по паритету (четность) и имеют признак наличия (или нет) в сообщении байта циклической защиты.
Байт защиты сообщения вместо разряда паритетной защиты дополняется девятым информационным разрядом. Код образующего полинома защиты: Пз=X9+X5+X3+1. Защищается целиком сообщение, предшествующее коду защиты, исключая байт АКП. Байт защиты дополняет все известительные сообщения УКПМ-2.
4.2.3. Функция ОТ устройства
После получения от УПУ команды ОТ выбранное (при идентификации байта АП индивидуальному адресу устройства) устройство передает в канал ТЧ (в адрес УПУ) одно из нижеследующих сообщений в зависимости от ситуации:
ОТ - при отсутствии зарегистрированных со времени последнего опроса по функции ОТ изменений состояний датчиков ТС или превышения уровней сигналов с датчиков ТИТ уставок допускового контроля со времени последнего опроса состояний этих сигналов;
ЗГТИТ- при превышении уровня сигнала по одному или нескольким каналам ТИТ уставок допускового контроля со времени последнего опроса по функции ОТ данной группы. При наличии изменений в двух группах ТИT одновременно устройство указывает в сообщении ЗГTИТ номер младшей группы;
ЗГТС - при наличии со времени последнего опроса по функции ОТ зарегистрированных изменений состояний одного или нескольких датчиков ТС или превышения уровней сигналов с датчиков ТИТ уставок допускового контроля со времени последнего опроса по функции ОТ состояний сигналов данной группы. При наличии изменений в нескольких группах одновременно устройство указывает в сообщении ЗГТС номер младшей группы.
По виду полученного от УКП сообщения УПУ принимает решение по запросу изменившейся информации. Использование УПУ команды ОТ позволяет существенно повысить скорость реакции телемеханического комплекса на изменения контролируемых объектов.
4.2.4. Функции ТУ устройства
Для обеспечения требуемой достоверности телеуправления при передаче по каналам ТЧ посылки ТУВ и ТУО дублируются УПУ с интервалом не менее 50 мс. Выбранное устройство сравнивает оба полученные сообщения и при их идентичности исполняет команду.
Для повышения надежности телеуправления коммутация тока обмотки каждого реле блока БРП со стороны УКПМ-2 производится двухсторонняя: выбором характера операции (ВКЛЮЧИТЬ/ОТКЛЮЧИТЬ), группы реле и выбором объекта в группе. Исполнительные реле располагаются матрицей 8х8. Электронные ключи выбора группы и характера операции коммутируют положительный полюс цепи питания обмоток реле, а ключи выбора объекта - отрицательный полюс. Электронные ключи снабжены цепями контроля состояния. Алгоритм исполнения УКПМ-2 команды ТУ следующий:
1) проверяется исходное состояние ключей перед включением, они должны быть в отключенном положении;
2) выдается команда включения ключа выбора группы и характера операции;
3) контролируется включенное состояние ключа выбора группы, характера операции и отключенное состояние всех остальных ключей;
4) выдается команда отключения ключа выбора группы и характера операции;
5) контролируется отключенное состояние всех ключей;
6) выдается команда включения ключа выбора объекта в группе;
7) контролируется включенное состояние ключа выбора объекта в группе и отключенное состояние всех остальных ключей;
8) выдается команда отключения ключа выбора объекта;
9) контролируется отключенное состояние всех ключей;
10) выдается команда включения ключа выбора группы, характера операции и ключа выбора объекта;
11) контролируется включенное состояние ключа выбора группы, характера операции и ключа выбора объекта в группе, а также отключенное состояние всех остальных ключей;
12) выдается квитанция в сторону УПУ об исполнении команды ТУ;
13) выдерживается задержка включенного состояния реле в течение 1...1,5 с;
14) выдается команда отключения ключа выбора группы и характера операции и ключа выбора объекта;
15) контролируется отключенное состояние всех ключей.
При несоответствии состояния ключей по п.п. 1), 3), 5), 7) и 9) реле не включается и квитанция УПУ не выдается. При несоответствии состояния ключей по п.п. 11) реле не включается и квитанция УПУ не выдается.
| УПУ| |Устройство | | ТУВ(ТУО) | | |------------------------------------------>|-- | | |~50мс | | ТУВ(ТУО) | | | |------------------------------------------>|-- | | | | | ТУВ(ТУО) | | |<------------------------------------------| | | | |t V
Рис.2. Процедура обмена УПУ-КП в режимах ТУВ и ТУО
4.2.5. Функции ЗС устройства
По запросам УПУ известительной информации (сообщение типа ЗС - запрос сообщения) устройство выдает блок информации (сообщение типа ИС - известительное сообщение) в соответствии с установленным форматом.
| УПУ| |Устройство | | Запрос информации | | |------------------------------------------>| | | | | | Информация | | |<------------------------------------------| | | | |t V
Рис.3. Процедура обмена сообщениями УПУ-УКП в режимах прямого запроса информации
4.2.6. Функция ЗМТС устройства
По запросам УПУ известительной информации по массиву ТС устройство выдает блок информации с числом групп ТС, установленным переключателем модуля МВТС устройства. Таким образом можно ограничить размер сообщения МТС числом задействованных на данном КП групп каналов ТС.
4.2.7. Функция ЗБО устройства
По запросам УПУ известительной информации по данным диагностики устройство выдает блок внутренних ошибок устройства.
4.2.8. Функция НУТИТ устройства
По команде НУТИТ производится загрузка в оперативную память устройства блока уставок допускового контроля значений по каналам ТИТ. По запросам УПУ известительной информации по данным уставок устройство выдает блок текущих уставок допускового контроля значений по каналам ТИТ.
5. УСТРОЙСТВО И РАБОТА УКПМ
5.1. Структурная схема устройства приведена на рис.4.
5.2. Устройство состоит из функционально законченных блоков: КПМ и БКС.
5.3. Блок КПМ содержит: блок питания (БПКП), контроллер телемеханической связи (КТМС), контроллер ввода-вывода устройства (КУКП-М), модуль ввода сигналов ТС (МВТС), модуль вывода сигналов ТУ (МВТУ) и модуль ввода сигналов ТИИ (МВИС).
5.4. Контроллеры и модули КПМ электрически соединены между собой внутренним интерфейсом, содержащим шины данных, адреса и управления (см. приложение 3.785.003 ТО1).
+------------------------------------+ |Блок КПМ +-----------------+ | | =24 В | БПКП |<=|====== ~220 В 50 Гц | +-----------| |<=|====== =24 В | | +-----------------+ | | | +-----------------+ | | | +<=====>| | | | | + | КТМС |<=|=========> Канал ЧМ | |---+-------| | | | | + +-----------------+ | | | + +-----------------+ | +------+ | | +<=====>| | | | |От датчиков ТИТ | | + | КУКП-М |<=|==| |<----------- | |---+-------| | | | БКС | | | + +-----------------+ | | |От датчиков ТС | | + +-----------------+ | | |<----------- | | +<=====>| | | | | | | + | МВТС |<=|==| |От датчиков ТИИ | |---+-------| | | | |<----------- | | + +-----------------+ | | | | | + +-----------------+ | | | | | +<=====>| | | | | | | + | МВИС |<=|==| | | |---+-------| | | +------+ | | + +-----------------+ | | | + +-----------------+ | | | +<=====>| | | к БРП | | | МВТУ |==|============> | +-----------| | | | +-----------------+ | +------------------------------------+
Рис. 4. Структурная схема устройства
5.5. КПМ имеет модульную конструкцию. Каждый функциональный модуль выполнен на двухсторонней печатной плате, размещенной в индивидуальном пластмассовом кожухе, и снабжен лицевой панелью, на которой расположены элементы индикации и присоединительные разъемы для подключения жгутов связи с БКС и БРП.
С тыльной стороны каждого модуля установлен интерфейсный разъем для межмодульного обмена в блоке.
Модули укрепляются на вертикально расположенном шасси, обеспечивающем их механическое крепление и электрическую связь. В нижней части модули имеют специальные кронштейны для зацепления за элементы шасси, а в верхней части крепятся винтом. В передней части КПМ модули обрамляются рамкой, к нижней части которой крепится кабеледержатель.
5.6. Цепи датчиков ТИТ, ТС и ТИИ подключаются к блоку БКС. Не допускается прокладка в одном кабеле:
а) цепей ТС и исполнительных цепей ТУ;
б) цепей ТИИ и исполнительных цепей ТУ;
в) цепей ТИТ и исполнительных цепей ТУ.
5.7. Датчики ТИТ должны подключаться к устройству с применением симметричной двухпроводной экранированной линии или контрольного кабеля.
5.8. Каждому устройству для организации обмена присваивается индивидуальный в пределах цепочечной линии адрес пункта АП, устанавливаемый распайкой перемычек на ответной части разъема "АДРЕС" контроллера КТМС.
5.9. Контроллеры (модули, содержащие микропроцессор) устройства обеспечивают выполнение функций:
КТМС - прием из линии связи телеинформации, демодулирование ее, распознавание адресата сообщения, проверка достоверности по кодам защиты, выделение информационной части сообщений в КУКП-М, выдача команды КУКП-М, прием известительной информации из КУКП-М, модулирование ее и выдача сообщений в линию связи согласно протокола;
КУКП-М - циклический обмен информацией с КТМС, циклический ввод уровней сигналов ТИТ, управление счетом модулем МВИС импульсов с датчиков ТИИ, управление выводом модулем МВТУ команд управления ТУ, циклический ввод через модуль МВТС состояний датчиков ТС.
5.10. Контоллеры КТМС и КУКП-М после включения автоматически производят тестирование микросхем постоянного запоминающего устройства (ПЗУ) и оперативного запоминающего устройства (ОЗУ). При отрицательном результате тестирования процессор не выходит из цикла теста памяти.
5.11. Процессор КТМС при положительном результате тестирования микросхем памяти переходит на выполнение процедуры обслуживания канала ЧМ.
5.12. Процессор КУКП-М при положительном результате тестирования микросхем памяти переходит на выполнение основного цикла по обслуживанию функций ТУ, ТИИ, ТС, ТИТ.
5.13. В конце основного цикла процессор КУКП-М опрашивает состояние разряда готовности КМТС принять информацию от КУКП-М. Если этот разряд установлен в нуль, то происходит переход процессора КУКП- М на процедуру обмена данными с КТМС.
После завершения обмена информацией с КТМС процессор КУКП-М вновь переходит на выполнение программы основного цикла, а процессор КТМС - на процедуру приема или передачи сообщений в линию ТЧ.
5.14. Основной цикл работы процессора КУКП-М (см. рис.5) состоит из подциклов, в каждом из которых производятся операции вывода команд ТУ, если таковые были, ввод сигналов датчиков ТС и ТИТ, а также считывание значений ТИИ, если получен запрос на их передачу.
**************** * НАЧАЛО * **************** | <-----------------+ /**************/ | / ВЫВОД ТУ / | /**************/ | | | /**************/ | / ВВОД ТС / | /**************/ | | | /**************/ | / ВВОД ТИТ / | /**************/ | | | /**************/ | / ВВОД ТИИ / | /**************/ | | | *************** | * ВВОД-ВЫВОД * | * В * | * К Т М С * | *************** | +-------------------+
Рис.5. Внутренний цикл контроллера КУКП-М
Основной цикл программы процессора КУКП-М начинается с активизации канала ТУ, если полученный от КТМС соответствующий ему код он отличен от нуля. Время удержания сигнала ТУ на выходных ключах - около 1,5 с для срабатывания реле цепей автоматики пользователя. В течение этого времени в каждом из пяти проходов основного цикла программы КУКП-М производит проверку соответствия кода на выходе ключей управления и содержимого буфера команды ТУ. Если указанное соответствие по первому проходу обеспечено, процессор КУКП-М устанавливает процессору КТМС соответствующий флаг, а последний передает в линию ТЧ квитанцию по выполнению устройством команды ТУ. В течение последующих четырех проходов КУКП-М удерживает активным сигнал ТУ, а затем отключает его. При обнаружении несоответствия принимаемого кода устанавливаемому процессор КТМС квитанцию УПУ не выдает, а процессору КУКП-М выдает команду отключения активизированного канала ТУ.
Подцикл "Ввод ТИИ" выполняется при получении от УПУ команды ЗГТИИ1 или ЗГТИИ2.
5.16. В подцикле "Ввод ТС" процессор КУКП-М считывает через модуль МВТС текущие значения ТС и передается процессору КТМС. Контроль за изменением состояний сигналов ТС относительно последней передачи массива ТС или последнего запроса ведет процессор КТМС.
5.17. В начале подцикла "Ввод ТИТ" процессор КУКП-М производит контроль напряжения смещения аналого-цифрового преобразователя (АЦП), проверку значений преобразования при измерении эталонных напряжений Uэт, вычисление поправочных коэффициентов, затем производит последовательную выборку и преобразование входных сигналов ТИТ, нормирование их с учетом поправочных коэффициентов и передачу процессору КТМС.
5.18. Устройство взаимодействует с вышестоящим уровнем посредством обмена сообщениями. Связь с верхним уровнем (станцией ПУ) по линии связи осуществляется с помощью КТМС, который декодирует (кодирует) принятые (передаваемые) сообщения и осуществляет обмен информацией с КУКП-М.
5.19. Все сообщения обмена составлены из 9-ти разрядных посылок и различаются по типу:
команды: ТУВ, ТУО;
запросы: ЗГИТ, ЗГТС, ЗМТС, ЗГТИИ1, ЗГТИИ2, ЗУТИТ;
известительные сообщения: ГТИТ, ГТС, МТС, ГТИИ1, ГТИИ2, ГТИТ, УТИТ;
команда обмена: ОТ.
Посылки ( исключая специальные, обозначающие конец сообщения и содержащие код защиты информации) включают разряд защиты информации (паритета) Рз, состояние которого соответствует нечетной сумме значений всех девяти разрядов. Нарушение этого правила рассматривается приемным устройством как конец сообщения. Различаются два вида посылок - идентификаторов окончания информационной части сообщения: прямой и условный концы группы. За посылкой кода конца сообщения (КС) следует 9-ти разрядный код защиты информационной части передаваемого сообщения. Код образующего полинома защиты: Пз=X9+X5+X3+1. Защищается все сообщение, предшествующее коду защиты исключая посылку АКП.
Первая информационная посылка каждого сообщения - АКП - содержит признак типа протокола (УВТК 120.2 или ТМ-120-1.М) и адрес УКП, которому предназначено сообщение. Первой посылке предшествует "лидер" - 8-ми разрядная нулевая последовательность (рис. 6).
+---------------+ | Лидер посылки-| | 8 "нулей" | +---------------+ |1 |8 9 10 11 12 13 14 15 16 17 битN +----- - - -----+----------------------------------------- - | 0 | | 0 | 1 | 1 | Х | 24 | 23 | 22 | 21 | 20 | Рз| +----- - - -----+----------------------------------------- - +---------------+ | | | |-------------------+ | | Старт посылки |-----+ | | | |---------------| | | | | Тип протокола | | | | | 1- УВТК 120.2 |---------+ | | | 0- ТМ 120 | | | |---------------| | | | Адрес КП |-------------+ | |---------------| | | Бит паритета |--------------------------------------+ | (нечетность) | +---------------+
Рис.6. Формат посылки АКП (адрес КП)
1 2 3 4 5 6 7 8 9 битN - --------------------------------------------- - | 27 | 26 | 25 | 24 | 23 | 22 | 21 | 20 | Рз| - --------------------------------------------- - +----------------------------------+ | +--------------------+ | | | Код функции KФ |--+ | | Номер группы НГ | | |--------------------| | | Биты паритета |--------------------+ | (нечетность) | +--------------------+
Рис.7. Формат посылок KФ и НГ (код функции и номер группы)
1 2 3 4 5 6 7 8 9 битN ------------------------------------- | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | -------------------------------------
Рис.8. Формат посылки КС (конец сообщения)
1 2 3 4 5 6 7 8 9 битN ------------------------------------- | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | -------------------------------------
Рис.9. Формат посылки УКС (условный конец сообщения)
1 2 3 4 5 6 7 8 9 битN ------------------------------------- | 28| 27| 26| 25| 24| 23| 22| 21| 20| -------------------------------------
Рис.10. Формат посылки КЗ (код защиты)
Устройство, получив по каналу связи сообщение, выделяет его адресную часть и при идентификации собственного адреса выделяет из остатка сообщения код функции и сопровождающие его параметры. После выполнения внутреннего цикла проверки достоверности и обработки полученной команды устройство передает в канал ответное сообщения для УПУ. При обнаружении любой некорректности принятого сообщения или собственной неисправности устройство не отвечает УПУ. Связки сообщений обмена между УПУ и КП приведены в табл.3.
Таблица 3
+---------------------------------------------------------+ | Запрос/команда УПУ | Ответ | Обмен УПУ-КП | | | КП | | |--------------------------+--------------+---------------| |Функция| Код |Длина|Число |Функция| Длина| Длина связки, | | | | х9р |команд| | х9р | х9р/разр. с | | | | | | | |учетом "лидера"| |-------+-----+-----+------+-------+------+---------------| | ОТ | 50Н | 4 | 1 | ОТ | 4 | 8/80 | | | | | | ЗГТИТ | 4 | 8/80 | | | | | | ЗГТС | 4 | 8/80 | |-------+-----+-----+------+-------+------+---------------| | ЗГТИТ | 10Н | 4 | 1 | ГТИТ | 21 | 25/233 | |-------+-----+-----+------+-------+------+---------------| | ЗГТС | 90Н | 4 | 1 | ГТС | 6 | 10/98 | |-------+-----+-----+------+-------+------+---------------| | ЗМТС | F0Н | 4 | 1 | МТС | 13 | 17/161 | |-------+-----+-----+------+-------+------+---------------| | ЗГТИИ1| 30Н | 4 | 1 | ГТИИ1 | 21 | 25/233 | |-------+-----+-----+------+-------+------+---------------| | ЗГТИИ2| 00Н | 4 | 1 | ГТИИ2 | 21 | 25/233 | |-------+-----+-----+------+-------+------+---------------| | ЗУТИТ | А0Н | 4 | 1 | УТИТ | 21 | 25/233 | |-------+-----+-----+------+-------+------+---------------| | НУТИТ | В0Н | 20 | 2 | НУТИТ | 4 | 44/404 | |-------+-----+-----+------+-------+------+---------------| | ТУВ | 70Н | 5 | 2 | ТУВ | 5 | 15/143 | |-------+-----+-----+------+-------+------+---------------| | ТУО | Е0Н | 5 | 2 | ТУО | 5 | 15/143 | +---------------------------------------------------------+
5.20. По команде ОТ (рис. 11) устройство возвращает сообщения:
ОТ - при отсуствии спорадической информации, ЗГТИТ - в случае превышения уставок допускового контроля каналов ТИТ, ЗГТС - при наличии изменений в группе ТС. Это наиболее оперативный режим контроля за изменением состояний контролируемых объектов в следящем режиме УПУ.
+ОТ----------Разряды-----------------------------------------+ | 1 2 3 4 5 6 7 8 9 | Содержание | +-----------------------------------+------------------------| | 1 | 1 | 1 | 24| 23| 22| 21| 20| Рз| Адрес КП | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | KФ ОТ=50Н | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | АГ =00Н | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный код конца | +---------------------------------36+------------------------+
Рис.11. Формат специальной команды опроса ОТ (опрос требований)
Команды ТУВ и ТУО дублируются УПУ при выдаче в линию. Получив первую команду и опознав в ней одну из команд ТУВ или ТУО устройство регистрирует признак полученной команды в буфере ОЗУ КТМС, устанавливает флаг приема 1-ой команды и ожидает повтор команды. Примерно через 50 мс УПУ повторяет команду. Приняв повтор команды устройство сравнивает ее с первой и в случае полной идентичности переходит к выполнению команды. При этом процессор КТМС передает полученную команду процессору КУКП-М. КУКП-М устанавливает выбранный канал ТУ в активное состояние. При очередном проходе основного цикла программы процессор КТМС запрашивает КУКП-М о выдаче ему кадра данных ввода и при подтверждении соответствия состояния активизированного канала ТУ устройство выдает УПУ квитанцию - сообщение с полученным кодом функции, подтверждая нормальное выполнение команды. После этого в течение еще 4-х проходов основного программного цикла (около 1,5 с) процессор КТМС контролирует указанное соответствие, а затем выдает КУКП-М команду на отключение активизированного канала ТУ.
+ТУВ/ТУО-----Разряды-----------------------------------------+ | 1 2 3 4 5 6 7 8 9 | Содержание | +-----------------------------------+------------------------| | 1 | 1 | 1 | 24| 23| 22| 21| 20| Рз| Адрес КП | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| KФ ТУВ(ТУО)=70Н(Е0Н) | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 23| 22| 21| 20| Рз| АГ | |---+---+---+---+---+---+---+---+---+------------------------| | Х8| Х7| Х6| Х5| Х4| Х3| Х2| Х1| Рз|Номер канала ТУ(поз.код)| |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный код конца | +К--------------------------------45+------------------------+
Рис.12. Формат команд ТУО и ТУВ (телеуправление отключения и включения)
20
+ТУВ(ТУО)-УПУ+~50мс+ТУВ(ТУО)-УПУ+ +ТУВ(ТУО)-КП1+ |------------|---->|------------|->|------------| | АКП1 | | АКП1 | | АКП1 | |------------| |------------| |------------| |KФ=ТУВ(ТУО) | |KФ=ТУВ(ТУО) | |KФ=ТУВ(ТУО) | |------------| |------------| |------------| | | | | | | +К---------45+ +К---------45+ +К---------45+
Рис.13. Процедура обмена УПУ-КП в режимах ТУВ и ТУО
По запросу УПУ известительной информации (сообщение типа ЗС - запрос сообщения) устройство выдает блок информации (сообщение типа ИС - известительное сообщение) в соответствии с установленным форматом.
+МТС---------Разряды-----------------------------------------+ | 1 2 3 4 5 6 7 8 9 | Содержание | +-----------------------------------+------------------------| | 1 | 1 | 1 | 24| 23| 22| 21| 20| Рз| Адрес КП | |---+---+---+---+---+---+---+---+---+------------------------| | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | KФ МТС=0F0Н | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 23| 22| 21| 20| Рз| Число групп ТС | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Данные группы 1 ТС | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Данные группы 2 ТС | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Данные группы 3 ТС | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Данные группы 4 ТС | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Данные группы 5 ТС | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Данные группы 6 ТС | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Данные группы 7 ТС | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Данные группы 8 ТС | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | Прямой код конца | |---+---+---+---+---+---+---+---+---+------------------------| | 28| 27| 26| 25| 24| 23| 22| 21| 20| Код защиты | +ИС------------------------------117+------------------------+
Рис.14. Формат сообщения МТС (массив ТС)
+ГТС----------Разряды----------------------------------------+ | 1 2 3 4 5 6 7 8 9 | Содержание | +-----------------------------------+------------------------| | 1 | 1 | 1 | 24| 23| 22| 21| 20| Рз| Адрес КП | |---+---+---+---+---+---+---+---+---+------------------------| | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | KФ ТС=90Н | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 23| 22| 21| 20| Рз| Группа ТС | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Данные группы ТС | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | Прямой код конца | |---+---+---+---+---+---+---+---+---+------------------------| | 28| 27| 26| 25| 24| 23| 22| 21| 20| Код защиты | +ИС-------------------------------54+------------------------+
Рис.15. Формат сообщения ГТС (группа ТС)
+ГТИТ--КП-----Разряды----------------------------------------+ | 1 2 3 4 5 6 7 8 9 | Содержание | +-----------------------------------+------------------------| | 1 | 1 | 1 | 24| 23| 22| 21| 20| Рз| Адрес КП | |---+---+---+---+---+---+---+---+---+------------------------| | 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | KФ ГТИТ=10Н | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | Х | Х | Рз| Номер группы ТИТ | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Канал ТИТ1: мл.разряды | |---+---+---+---+---+---+---+---+---+- - - - - - - - - - - - | | 22| 21| 20| 0 | Зн|210| 29| 28| Рз| Канал ТИТ1: ФУ/ст.разр.| | | | | | 0 | | | | | значение положительное | | | | | | 1 | | | | | значение отрицательное | | 0 | 0 | 1 | | | | | | | флаг уст.1 скорости | | 0 | 1 | 0 | | | | | | | флаг нижн.предельн.уст.| | 0 | 1 | 1 | | | | | | | флаг верх.предельн.уст.| | 1 | 0 | 0 | | | | | | | флаг нижн.аварийн.уст. | | 1 | 0 | 1 | | | | | | | флаг верх.аварийн.уст. | | 1 | 1 | 0 | | | | | | | флаг уст.достоверности | | 1 | 1 | 1 | | | | | | | флаг уст.2 скорости | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Канал ТИТ2: мл.разряды | |---+---+---+---+---+---+---+---+---+- - - - - - - - - - - - | | 22| 21| 20| 0 | Зн|210| 29| 28| Рз| Канал ТИТ2: ФУ/ст.разр.| |---+---+---+---+---+---+---+---+---+------------------------| | | | | | | | | | | | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Канал ТИТ8: мл.разряды | |---+---+---+---+---+---+---+---+---+- - - - - - - - - - - - | | 22| 21| 20| 0 | Зн|210| 29| 28| Рз| Канал ТИТ8: ФУ/ст.разр.| |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | Прямой код конца | |---+---+---+---+---+---+---+---+---+------------------------| | 28| 27| 26| 25| 24| 23| 22| 21| 20| Код защиты | +ИС------------------------------189+------------------------+
Рис.16. Формат сообщения ГТИТ (группа ТИТ). Здесь Зн - знак значения: 0-"плюс", 1- "минус"
23
+ГТИИ-КП-----Разряды-----------------------------------------+ | 1 2 3 4 5 6 7 8 9 | Содержание | +-----------------------------------+------------------------| | 1 | 1 | 1 | 24| 23| 22| 21| 20| Рз| Адрес КП | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 1 |KФ ГТИИ1=30Н-без сброса | | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |KФ ГТИИ2=00Н-со сбросом | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | Рз| Номер группы ТИИ | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Канал ТИИ1: мл.разряды | |---+---+---+---+---+---+---+---+---+- - - - - - - - - - - - | |215|214|213|212|211|210| 29| 28| Рз| Канал ТИИ1: ст.разряды | |---+---+---+---+---+---+---+---+---+------------------------| | | | | | | | | | | | | 27| 26| 25| 24| 23| 22| 21| 20| Рз| Канал ТИИ8: мл.разряды | |---+---+---+---+---+---+---+---+---+- - - - - - - - - - - - | |215|214|213|212|211|210| 29| 28| Рз| Канал ТИИ8: ст.разряды | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | Прямой код конца | |---+---+---+---+---+---+---+---+---+------------------------| | 28| 27| 26| 25| 24| 23| 22| 21| 20| Код защиты | +ИС------------------------------189+------------------------+
Рис.17. Формат сообщений ГТИИ1 и ГТИИ2 (группа ТИИ без сброса и со сбросом счетчиков после выдачи значений)
+ЗУТИТ-ПУ-----Разряды----------------------------------------+ | 1 2 3 4 5 6 7 8 9 | Содержание | +-----------------------------------+------------------------| | 1 | 1 | 1 | 24| 23| 22| 21| 20| Рз| Адрес КП | |---+---+---+---+---+---+---+---+---+------------------------| | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | KФ ЗУТИТ=0А0Н | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | Х | Х | Рз| Номер канала ТИТ | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный код конца | +ЗИ-------------------------------36+------------------------+
Рис.18. Формат запроса уставок ТИТ
+УТИТ--КП-----Разряды----------------------------------------+ | 1 2 3 4 5 6 7 8 9 | Содержание | +-----------------------------------+------------------------| | 1 | 1 | 1 | 24| 23| 22| 21| 20| Рз| Адрес КП | |---+---+---+---+---+---+---+---+---+------------------------| | 1 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | KФ УТИ=0В0Н | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | Х | Х | Рз| Номер канала ТИТ | |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз|Верх.уст.дост. -мл.разр.| |---+---+---+---+---+---+---+---+---+- - - - - - - - - - - - | | Х | Х | Х | Х | Зн|210| 29| 28| Рз|Верх.уст.дост. -ст.разр.| |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз|Верх.авар.уст. -мл.разр.| |---+---+---+---+---+---+---+---+---+- - - - - - - - - - - - | | Х | Х | Х | Х | Зн|210| 29| 28| Рз|Верх.авар.уст. -ст.разр.| |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз|Нижн.авар.уст. -мл.разр.| |---+---+---+---+---+---+---+---+---+- - - - - - - - - - - - | | Х | Х | Х | Х | Зн|210| 29| 28| Рз|Нижн.авар.уст. -ст.разр.| |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз|Верх.пред.уст. -мл.разр.| |---+---+---+---+---+---+---+---+---+- - - - - - - - - - - - | | Х | Х | Х | Х | Зн|210| 29| 28| Рз|Верх.пред.уст. -ст.разр.| |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз|Нижн.пред.уст. -мл.разр.| |---+---+---+---+---+---+---+---+---+- - - - - - - - - - - - | | Х | Х | Х | Х | Зн|210| 29| 28| Рз|Нижн.пред.уст. -ст.разр.| |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз|Уст.1 скорости -мл.разр.| |---+---+---+---+---+---+---+---+---+- - - - - - - - - - - - | | Х | Х | Х | Х | Зн|210| 29| 28| Рз|Уст.1 скорости -ст.разр.| |---+---+---+---+---+---+---+---+---+------------------------| | 27| 26| 25| 24| 23| 22| 21| 20| Рз|Уст.2 скорости -мл.разр.| |---+---+---+---+---+---+---+---+---+- - - - - - - - - - - - | | Х | Х | Х | Х | Зн|210| 29| 28| Рз|Уст.2 скорости -ст.разр.| |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | Прямой код конца | |---+---+---+---+---+---+---+---+---+------------------------| | 28| 27| 26| 25| 24| 23| 22| 21| 20| Код защиты | +ИС------------------------------171+------------------------+
Рис.19. Формат сообщения УТИТ (уставки ТИТ). Здесь Зн - знак значения: 0-"плюс", 1- "минус"
+ЗГТС-ПУ-----Разряды-----------------------------------------+ | 1 2 3 4 5 6 7 8 9 | Содержание | +-----------------------------------+------------------------| | 1 | 1 | 1 | 24| 23| 22| 21| 20| Рз| Адрес КП | |---+---+---+---+---+---+---+---+---+------------------------| | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | KФ ЗТГС=90Н | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | Х | Х | Х | Х | Рз| Номер канала ТС (1...8)| |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный код конца | +ЗИ-------------------------------36+------------------------+ Рис.20. Формат запроса ЗГТС (запрос группы ТС) +ЗМТС-ПУ-----Разряды-----------------------------------------+ | 1 2 3 4 5 6 7 8 9 | Содержание | +-----------------------------------+------------------------| | 1 | 1 | 1 | 24| 23| 22| 21| 20| Рз| Адрес КП | |---+---+---+---+---+---+---+---+---+------------------------| | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | KФ ЗМТС=0F0Н | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | Номер группы ТС | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный код конца | +ЗИ-------------------------------36+------------------------+ Рис.21. Формат запроса ЗМТС (запрос массива ТС) +ЗГТИТ-ПУ----Разряды-----------------------------------------+ | 1 2 3 4 5 6 7 8 9 | Содержание | +-----------------------------------+------------------------| | 1 | 1 | 1 | 24| 23| 22| 21| 20| Рз| Адрес КП | |---+---+---+---+---+---+---+---+---+------------------------| | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | KФ ЗГТИТ=10Н | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | Х | Х | Рз| Номер группы ТИТ (1/2) | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный код конца | +ЗИ-------------------------------36+------------------------+ Рис.22. Формат запроса ЗГТИТ (запрос группы ТИТ) +ЗГТИИ--ПУ----Разряды----------------------------------------+ | 1 2 3 4 5 6 7 8 9 | Содержание | +-----------------------------------+------------------------| | 1 | 1 | 1 | 24| 23| 22| 21| 20| Рз| Адрес КП | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 1 |KФ ЗГТИИ1=00Н-без сброса| | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |KФ ЗГТИИ2=00Н-со сбросом| |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | Номер группы ТИИ | |---+---+---+---+---+---+---+---+---+------------------------| | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | Условный код конца | +ЗИ-------------------------------36+------------------------+ Рис.23. Формат запросов ЗГТИИ (запросы группы ТИИ без сброса и со сбросом счетчиков после выдачи значений) +ОТ----УПУ+ +ОТ---КП1-+ +ОТ----УПУ+ +ОТ---КПn-+ |---------|-->|---------|--...-->|---------|-->|---------| | АКП=КП1 | | АКП=КП1 | | АКП=КПn | | АКП=КПn | |---------| |---------| |---------| |---------| | KФ=ОТ | | KФ=ОТ | | KФ=ОТ | | KФ=ОТ | |---------| |---------| |---------| |---------| | | | | | | | | +-------36+ +-------36+ +-------36+ +-------36+ Рис.24. Процедура обмена УПУ-КП в режиме ОТ и при отсуствии у УКП спорадической информации +ОТ--УПУ+ +ЗГТС(ЗГТИТ)-КП1+ +ЗГТС(ЗГТИТ)-УПУ+ +ГТС------КП1+ |-------|->|---------------|->|---------------|->|------------| | АКП1 | | АКП1 | | АКП1 | | АКП1 | |-------| |---------------| |---------------| |------------| | KФ=ОТ | |KФ=ЗГТС(ЗГТИТ) | |KФ=ЗГТС(ЗГТИТ) | |KФ=ГТС(ГТИТ)| |-------| |---------------| |---------------| |------------| | | | | | | | | +-----36+ +ЗИ-----------36+ +ЗИ-----------36+ +ИС---54(189)+ Рис.25. Процедура обмена УПУ-КП в режиме ОТ и при наличии у УКП1 спорадической информации +--------УПУ+ +--------КПn+ |-----------|----->|-----------| | АКПn | | АКПn | |-----------| |-----------| | KФ ЗГТС | | KФ ГТС | | ЗМТС | | МТС | | ЗГТИТ | | ГТИТ | | ЗГТИИ1 | | ГТИИ1 | | ЗГТИИ2 | | ГТИИ2 | | ЗУТИТ | | УТИТ | |-----------| |-----------| | | | | +ЗИ-------36+ +ИС---------+
Рис.26. Процедура обмена сообщениями УПУ-КП в режимах прямого запроса информации
6. УСТРОЙСТВО И РАБОТА СОСТАВНЫХ ЧАСТЕЙ УСТРОЙСТВА
6.1. Устройство и работа КУКП-М
6.1.1. КУКП-М используется в составе устройства в качестве контроллера ввода-вывода. КУКП-М обеспечивает аналого-цифровое преобразование сигналов ТИТ и управление модулями МВТС-М, МВТУ-М и МВИС-М.
6.1.2. Габаритные размеры КУКП-М не превышают 300х255х260 мм3.
6.1.3. Масса КУКП-М не превышает 0,5 кг.
6.1.4. Питание КУКП-М осуществляется от блока питания КПМ-2 напряжением 24(+3,3-4,4) В постоянного тока. Ток, потребляемый КУКП-М от блока питания, не превышает 0,2 А.
6.1.5. Вид, диапазон входных аналоговых сигналов ТИТ и входное сопротивление каналов преобразования КУКП-М представлены в табл.4.
Таблица 4
+-------------------------------------------------------+ |Вид входного| Диапазон входных | Входное | |сигнала ТИТ | сигналов каналов ТИТ | сопротивление| |------------+---------------------------+--------------| | Напряжение | минус 10 В ... плюс 10 В |более 1 МОм | | постоянного| | | | тока | | | |------------+---------------------------+--------------| | Постоянный | минус 10 мА ... плюс 10 мА| 1 кОм | | ток | минус 40 мА ... плюс 40 мА| 250 Ом | +-------------------------------------------------------+
6.1.6. Число разрядов преобразования - 12 двоичных разрядов со знаком.
6.1.7. Предел допускаемого значения основной приведенной погрешности преобразования не более +-0,25 %.
6.1.8. Предел допускаемого значения дополнительной приведенной погрешности от изменения величины питающего напряжения, частоты, изменения температуры окружающей среды (на каждые 10 оС) не превышает половины предела допускаемой основной погрешности преобразования.
6.1.9. Максимальное число входов аналоговых сигналов (каналов ТИТ) -16.
6.1.10. Схема структурная КУКП-М приведена на рис.27 и включает в себя следующие основные узлы:
ВП- входной преобразователь сигналов ТИТ, обеспечивающий нормирование и фильтрацию переменной составляющей входных сигналов ТИТ;
МХ1- коммутатор каналов ТИТ №№2...16;
МХ2- коммутатор эталонных сигналов и канала ТИТ №1;
АЦП- аналого-цифровой преобразователь;
узлы 1 и 2 гальванической развязки;
схема определения знака измеряемого значения;
схема управления КУКП-М;
источник вторичного питания КУКП-М.
Каналы+--+ +---+ +----------+ +----+ +--------+ ТИТ |ВП| |MX2|->|Схема опре|->-|АЦП |->-| Гальва-| 1-----| |---->--------| | | деления | | | . |ническая| | | +---+ | | | знака | | | . |развязка| 2-----| |--|MX1|-->---| | +----------+ | | . |(узел 1)| . | |. | | Uэт1-| | | | . | | . | |. | | Uэт2-| | | |->-| | 16----| |--| | | | | | +--------+ +--+ +---+ +---+ +----+ |...| | | | | | +-^----------^---------------------^----+ | | | Гальваническая развязка (узел 2) | | |К модулям +---------------------------------------+ | | ввода- | | | | | | вывода | | | | | | и КТМС-М +-^----------^-----------^---------^-------V---V+ | |-----> | |. | Схема управления КУКП-М |. | |. | |-----> +-----------------------------------------------+ От БПКП +----------------+ Для внутренних =24В | Источник | нужд: +5В;+-15В;+5В -->--| питания |---> | | +----------------+
Рис. 27. Схема структурная КУКП-М
6.1.11. Схема электрическая принципиальная КУКП-М приведена в приложении 3.785.003 ТО1 и включает:
1) АЦП (аналого-цифровой преобразователь) в составе:
нормирующие преобразователи с фильтрами (Е1...Е16);
коммутатор аналоговых сигналов (D10, D12);
регистр управляющего слова РУС (D11);
узел гальванической развязки (VE1...VE17);
прецизионный инвертор (D16, D20, D21);
источник опорного и эталонных напряжений (D14, D17, VD4);
компаратор знака (D19);
генератор тактовой частоты (D16.1...D16.3);
схема формирования стартового импульса (D22.1, D22.2, D23.2);
схема аналого-цифрового преобразователя (D27);
2) cхему управления КУКП-М в составе:
процессор (D3);
ОЗУ (D7);
ПЗУ (D6);
регистр адреса (D5);
схема интерфейса (D8);
схема логики (D1, D2);
схема дешифратора (D9);
cхема индикации наличия питающего напряжения и работы процессора (VT2, VD3);
3) источник вторичного питания КУКП-М Е17.
6.1.12. Машинные коды рабочей программы функционирования КУКП-М размещены в УФППЗУ при изготовлении устройства.
После включения питания производится тестирование ОЗУ, ПЗУ и начальная проверка состояний выходов ТУ и ТС. Далее процессор переходит на выполнение процедуры измерения сигналов ТИТ:
1) процессор КУКП-М устанавливает входной коммутатор на короткозамкнутую перемычку и выдает сигнал запуска АЦП. Полученный с выхода АЦП код соответствует значению суммарного смещения нулей всего
тракта усиления и АЦП - Uо. Ксм сохраняется в ОЗУ;
2) процессор КУКП-М устанавливает входной коммутатор на внутренний источник опорного напряжения (ИОН) и запускает АЦП. От кода с выхода АЦП Uфакт вычитается Uо и расчитывается поправочный масштабный коэффициент Км по формуле:
Км = Uэт/(Uфакт - Uо),
где Uэт - код эталонного напряжения ИОН, установленный в ПЗУ КУКП-М;
3) процессор КУКП-М переходит в режим измерения входных значений Uвх с каналов ввода ТИТ.
Все получаемые значения обрабатываются по формуле:
U = (Uвх - Uо) * Км
Для исключения влияния на измеряемое значение помехи промышленной частоты, измерение входных значений производится парными блоками с межблочным интервалом длительностью 50 мс, а полученные значения нормируются.
Все команды для процессора КУКП-М формируются процессором КТМС- М. На каждую из полученных команд процессор КУКП-М возвращает КТМС-М блок информации или квитанцию, осуществляя исполнение запроса- команды. На рис.28 приведена блок-схема алгоритма работы процессора КУКП-М.
+----------+ | НАЧАЛО | +----------+ +----------+ | А=1 | +----------+ +---------------+ |Тест ОЗУ, ПЗУ | | ОЗУ, ПЗУ | +---------------+ +-------------------+ |Начальная проверка | | выходов ТУ | +-------------------+ |--------------------+ +-----------------------+ | | Ввод Uо, Uфакт | | | Вычисление масштабного| | | коэффициента | | +-----------------------+ | |----------------+ | +-------------------+ | | | Ввод сигналов ТС | | | | и ТИТ | | | +-------------------+ | | +---------------------+ | | |Контроль значений ТИТ| | | |по введенным уставкам| | | +---------------------+ | | +---------------------+ | | |Выдача КТМС состояний| | | | сигналов ТС и ТИТ | | | +---------------------+ | | +---------------------+ | | |Прием от КТМС команды| | | +---------------------+ | | +---------------------+ | | | Выполнение получен-| | | | ной команды | | | +---------------------+ | | +----------+ | | | А= А+1 | | | +----------+ | | нет | | < А= 256?>-----------+ | | +----------+ | | А= 0 | | +----------+ | +--------------------+
Рис. 28. Блок-схема алгоритма функционирования процессора КУКП-М
6.1.13. Тракт аналого-цифрового преобразования
Входные сигналы с датчиков ТИТ могут быть представлены в величинах согласно табл.5. На наборном поле ХЕ8 нормирующих преобразователей сигналов ТИТ устанавливаются перемычки согласно табл.5.
Таблица 5
----------------------------------------------------- | Исполнение входного |Перемычки,устанавливаемые| | преобразователя |на колодке ХЕ8 Е1...Е16 | | |между выводами | |-------------------------|-------------------------| |минус 10В ... плюс 10В | нет | | | | |минус 10мА ... плюс 10мА | 2 и 3 | | | | |минус 40мА ... плюс 40мА | 1 и 2 | | | | -----------------------------------------------------
В состав нормирующих преобразователей (Е1...Е16) включены однозвенные ВЧ-фильтры (R92, C29) для фильтрации ВЧ-составляющих входного сигнала. Частота среза фильтра выбрана около 150 Гц.
Сигналы с выходов нормирующих преобразователей, представленные напряжением, поступают на 16-ти канальный коммутатор D10, управляемый процессором. Канал ТИТ №1, два эталонных значения напряжения подключены к коммутатору D12. Выбранный коммутатором входной сигнал через усилитель D13, D18, коммутатор D20 и усилитель D21, поступает на вход преобразователя D27.
АЦП D27 функционирует под управлением сигналов ЗАПУСК, УПРАВЛЕНИЕ МР (LB), УПРАВЛЕНИЕ СР (НВ).
Сигналом RKS-S с XE4:1-XE7:2 в регистр управляющего слова РУС (D11) записывается код управляющего слова (рис. 29).
+---------------------------------------+ | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | +---------------------------------------+ +---------++--------------------------------------+ | Резерв || |N канала| +---------+|-----------------------------+--------| | 0 1 0 0 0 0 0 | Uэт0 | | 1 0 0 0 0 0 0 | Uэт1 | | 1 1 0 0 0 0 0 | 1 | | 0 0 0 0 0 0 1 | 2 | | 0 0 0 0 0 1 0 | 3 | | 0 0 0 0 0 1 1 | 4 | | 0 0 0 0 1 0 0 | 5 | | 0 0 0 0 1 0 1 | 6 | | 0 0 0 0 1 1 0 | 7 | | 0 0 0 0 1 1 1 | 8 | | 0 0 0 1 0 0 0 | 9 | | 0 0 0 1 0 0 1 | 10 | | 0 0 0 1 0 1 0 | 11 | | 0 0 0 1 0 1 1 | 12 | | 0 0 0 1 1 0 0 | 13 | | 0 0 0 1 1 0 1 | 14 | | 0 0 0 1 1 1 0 | 15 | | 0 0 0 1 1 1 1 | 16 | +--------------------------------------+
Рис. 29. Структура управляющего слова
Следующим тактом за выдачей сигнала RKS-S на входы EL и EН D27 с XE3:10-XE6:10 подается сигнал PB1-HL, разрешающий вывод с преобразователя (D27) старших разрядов данных. На вход Т D27 подается тактовая частота 25 кГц с генератора (D16.1, D16.2, D16.3, D23.1).
Входной сигнал через коммутаторы D10 и D12 подается на усилитель D13 с коэффициентом передачи 1, с выхода которого - на вход инвертирующего усилителя D18, вход DI1 коммутатора D20, а также на вход компаратора знака D19.
Компаратор знака D19 управляет коммутатором D20, который совместно с инвертирующим усилителем D18 представляет выпрямитель входного сигнала. Таким образом на вход повторителя D21 всегда поступает сигнал одного знака.
Микросхема D27 совместно с D28 и компаратором D29 представляют собой завершенную схему АЦП.
При поступлении сформированного сигнала START на вход S D27 и наличии тактовых импульсов на входе Т начинается аналого-цифровое преобразование методом последовательного приближения.
После выдачи сигнала START процессор КУКП-М считывает старший байт данных с АЦП в формате, приведенном на рис.30 и контролирует значение разряда D5.
+---------------------------------------+ | 0 | 0 | D5 | D4 | D3 | D2 | D1 | D0 | +---------------------------------------+ | | +---------------------------------------+ | | | 12 11 10 9 |Старшие разряды АЦП| | | +---------------------------------------+ | | Знаковый разряд АЦП | +-------------------- | Конец преобразования АЦП +-----------------------------
Рис.30. Формат старшего байта данных преобразователя
При D5=1 процессор фиксирует старший байт в ОЗУ и считывает младший байт данных АЦП. Подобным образом производится преобразование одного блока сигналов ТИТ по всем 16-ти каналам.
6.1.14. Работа КУКП-М в режиме ввода-вывода дискретных сигналов
Модули ввода-вывода дискретных сигналов МВТС-М и МВТУ-М управляются сигналами PB1 (МЛ/СТ), READ (ЧТН), WRITE (ЗАП), ВМ1...ВМ4, D0...D7.
В режиме ввода-вывода дискретных сигналов КУКП-М выставляет на интерфейсных линиях внутренней магистрали байт управления модулями в формате, приведенном на рис.31.
+---------------------------------------+ | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | +---------------------------------------+ +-----------------------------+ | | +----------------+ |не используется| 0 0 0 | | | | 0 - 1-й байт | |выбор модуля 1 | 0 0 1 | | | | 1 - 2-й байт | |выбор модуля 2 | 0 1 0 | | | +----------------+ |выбор модуля 3 | 0 1 1 | | | --+ +-- |выбор модуля 4 | 1 0 0 | | | Запись - +---+ |не используется| 1 0 1 | | +------------------ |разрешение АЦП | 1 1 0 | | --+ +-- |КТМС | 1 1 1 | | Чтение - +---+ +-----------------------------+ +-------------------------
Рис.31. Формат байта управления модулями
Комбинация состояний разрядов D5, D6 и D7 байта управления определяет адрес модуля. Значение разряда D1 определяет адрес активного байта модуля (младший/старший). Сигналом ЗАПИСЬ=1 производится запись данных в адресованный регистр адресованного модуля. Сигнал ЧТЕНИЕ=1 обеспечивает выдачу адресуемым модулем на шину данных содержимого активного байта.
6.1.15. Работа КУКП-М в режиме обмена с КТМС-М
После завершения операций ввода-вывода процессор КУКП-М приступает к передаче кадра данных процессору КТМС-М. Диаграмма обмена представлена на рис. 32. Первоначально процессор КУКП-М анализирует состояние сигнала ОТВЕТ на линии С5 D8. При С5=0 процессор КУКП-М выставляет на выходе порта А D8 первый байт данных. Строб данных через некоторый промежуток, необходимый для устранения перекоса данных на приеме, формируется состоянием линии КТМС=1. В ответ на строб данных процессор КТМС-М (принимает строб на линии КТМС (С6 D8)) считывает данные по линиям порта В D8 и выставляет сигнал подтверждения приема данных на линии ОТВЕТ ( А6 D8 ). Процессор КУКП- М приняв состояние С5=1 D8 снимает данные с порта А и возвращает линию строба передаваемых данных в состояние низкого уровня (КТМС=0). Получив на входе КТМС низкий уровень сигнала строба данных процессор КТМС-М возвращает уровень на линии ОТВЕТ в состояние низкого уровня (ОТВЕТ=0). Процесс передачи байта данных из КУКП-М в КТМС-М завершен. Последующие байты информационного кадра передаются аналогично. В режиме обмена информацией процессоры КУКП-М и КТМС-М поддерживают согласно алгоритма дисциплину обмена на уровне соглашения: принята посылка - передан ответ.
КТМС-М __ __________ _ _ ___________ __ КУКП-М ---- \ / \ / \ / \ / ----- ДАННЫЕ X КТМС< KУКП X X КТМС >KУКП X ДАННЫЕ Порт В __/_\__________/_\_ _/_\___________/_\__t Порт А КТМС +-------+ +---------+ КТМС C6-вход ______|_______|_____________|_________|__t ОТВЕТ- +-------+ +------+ ОТВЕТ А6-выход_________|_______|_________|______|_____t C5-вход
Рис.32. Диаграмма обмена между КТМС-М и КУКП-М
Обратная передача данных из КТМС-М в КУКП-М производится следующим порядком. При готовности передачи байта данных в КУКП-М процессор КТМС-М анализирует состояние сигнала на линии РШ КТМС. При РШ КТМС=0 процессор КТМС-М выставляет на выходе порта В D8 первый байт данных. Строб данных через некоторый промежуток, необходимый для устранения перекоса данных на приеме, формируется наличием сигнала ОТВЕТ=1. В ответ на строб данных процессор КУКП-М (принимает строб данных на линии С5 D8) считывает данные по линиям порта А D8 и выставляет сигнал подтверждения приема данных на линии КТМС. Процессор КТМС приняв подтверждение приема - РШ КТМС=1 снимает данные с порта В и возвращает линию строба передаваемых данных в состояние низкого уровня (ОТВЕТ=0). Получив на входе С5 D8 низкий уровень сигнала строба данных процессор КУКП-М возвращает уровень на линии КТМС в состояние низкого уровня (КТМС=0). Процесс передачи байта данных из КТМС-М в КУКП-М завершен. Последующие байты информационного кадра передаются аналогично.
После завершения цикла обмена с КТМС-М процессор КУКП-М переходит на выполнение своего внутреннего цикла по обслуживанию ТУ, ТИИ, ТС и ТИТ.
6.2. Устройство и работа модуля МВТС-М
6.2.1. Модуль МВТС-М предназначен для ввода дискретных сигналов, выдаваемых датчиками ТС. Модуль является пассивным элементом и работает под управлением КУКП-М. Структурная схема МВТC представлена на рис.33. МВТC состоит из следующих основных частей:
схема управления модулем (СУ) предназначена для гальванической развязки цепей модуля и обеспечения функционирования основных узлов модуля;
переключатель (П), расположенный на лицевой панели модуля, предназначен для выбора числа обслуживаемых модулем (устройством) групп;
источник питания (ИП) предназначен для питания функциональной части МВТC и датчиков ТС;
буферный регистр (БР) предназначен для фиксации позиционного кода выбора группы ТС;
блоки ключей (БК1 и БК2) предназначены для обеспечения токовой нагрузки модуля.
К КУКП-М +-----+ +-----+ +----------+ <---------->| СУ | | БР | | |--->Гр1 ТC . | |<-->| |<-->| БК1 |--->Гр2 ТC . | | | | | |--->Гр3 ТC . | | | | | |--->Гр4 ТC <---------->| | | | | |--->Гр5 ТC | | | | | |--->Гр6 ТC +------+ | | | | | |--->Гр7 ТC | П | | | | | | |--->Гр8 ТC | |--->| | | | +----------+ | | | | | | +----------+ | | | | | |<-->| |<---ТC1 +------+ +-----+ +-----+ | БК2 |<---ТC2 От БПКП +------+ | |<---ТC3 =24В | ИП |На внутренние | |<---ТC4 -------->| |нужды МВТC: | |<---ТC5 | |+5В,+-15В | |<---ТC6 | |--------> | |<---ТC7 | | | |<---ТC8 | | +----------+ +------+
Рис. 33. Схема структурная модуля МВТС-М
6.2.2. Входными неинтерфейсными сигналами МВТС-М являются сигналы с выхода датчиков ТС контактного или бесконтактного типа. Параметры сигналов с датчиков ТС приведены в п.4.2.
6.2.3. Входными и выходными интерфейсными сигналами модуля МВТС-М являются сигналы обмена модуля с КУКП-М:
D0...D7 - сигналы данных;
ЗП - сигнал строба записи данных;
ЧТ - сигнал строба чтения данных;
1/2Б - сигнал выбора номера байта.
Уровни сигналов данной группы соответствуют: высокий уровень - от 3,5 до 5,5 В; низкий уровень - от 0 до 0,8 В.
6.2.4. При обращении к МВТС-М процессор КУКП-М выставляет на шину ДАННЫХ позиционный код номера группы ТС и устанавливает состояния сигналов "ВМ"=0 и "1/2Б"=0, после чего выдается сигнал "ЗАП"=1.
Сигналы с шины ДАННЫХ после гальванической развязки СУ (D1, VE1...VE12) поступают на вход буферного регистра (Е1...Е4) и записываются в него сигналом ЗАП.
Активным сигналом выбора группы ТС является низкое напряжение (менее 1 В) на соответствующем выходе БК1. После задания группы ТС процессор КУКП-М устанавливает сигнал 1/2Б в состояние логической единицы и считывает второй байт МВТС-М: сигналом чтения ("ЧТ"=1) процессор КУКП-М инициирует вывод модулем МВТС-М на шину данных байта состояний сигналов выбранной группы из БК2. Диаграмма сигналов обмена процессора КУКП-М с модулем МВТС-М представлена на рис.34.
--------+ +-- ВМ1 ________|__________________________________________________|_t +---------------+ +----------- 1/2Б____________________|_______________|_____________|__________t _____ ______ ____ ____ _ _ _ ______ ____ ____ _ \ / \ / \ / \ / \ / \ / \ / \ / D0...D7 Х N ГрТС Х Х ТС Х Х N ГрТС Х Х ТС Х _____/_\______/_\____/_\____/_\_____/_\______/_\____/_\____/_\t --------+ +---------------------------+ +------------------ ЗП ________|__|___________________________|___|_________________t ---------------------+ +---------------------------+ +---- ЧТ _____________________|___|___________________________|___|___t
Рис.34. Диаграмма сигналов обмена процессора КУКП-М с модулем МВТС-М
Таким образом, задавая номер группы ТС от 1 до n, процессор КУКП-М производит ввод состояний сигналов ТС всех групп. Количество групп ТС n (nmax=8), обслуживаемых устройством в режиме обработки функции ЗМТС, задается с помощью переключателя, расположенного на лицевой панели модуля МВТС-М. Установленное на переключателе двоичным кодом количество групп ТС отображается единичными индикаторами, расположенными на лицевой панели модуля и обозначенными цифрами "1" (i=1), "2" (i=2) и "4" (i=3).
Число выбранных групп определяется выражением:
N = 1+а1*1+а2*2+а3*4,
где аi = 0 при отсуствии свечения индикатора i;
аi = 1 при наличии свечения индикатора i.
Состояние выходных ключей выбора группы ТС контролируются при работе модуля.
6.2.5. Габаритные размеры модуля МВТС-М не превышают 30х255х260 мм. Масса модуля МВТС-М не превышает 0,5 кг.
6.2.6. Питание модуля МВТС-М обеспечивается от блока питания КПМ (БПКП) постоянным током напряжением (24+3,6-4,8) В. Ток, потребляемый модулем от блока питания, не превышает 0,2 А. Получаемаемое от БПКП напряжение ИП преобразовывает в ряд напряжений для собственных нужд:
а) стабилизированное напряжение 5 В для питания функциональной части модуля (основной канал источника);
б) стабилизированное напряжение 24 В для питания цепей датчиков ТС.
6.2.7. Схема электрическая принципиальная модуля МВТС-М приведена в приложении 3.785.003 ТО1 и содержит:
схему гальванической развязки входных интерфейсных сигналов (D1, VE1...VE12) и схему гальванической развязки выходных интерфейсных сигналов (D3...D10, VE13...VE20);
схему формирования сигналов записи и чтения состояний буферного регистра (D1, D2);
схему 16-ти разрядного буферного регистра (Е1...Е8);
фильтрующие цепочки (C1, R5...C16, R20);
источник питания (Е9);
схему задания и индикации числа групп ТС (S1, R31, R32, VD4, R33).
6.3. Устройство и работа модуля МВТУ
6.3.1. Модуль МВТУ предназначен для выдачи сигналов ТУ. Модуль является пассивным элементом и работает под управлением КУКП-М. Структурная схема МВТУ представлена на рис. 35. Модуль МВТУ состоит из следующих основных частей:
схема управления модулем (СУ) предназначена для гальванической развязки цепей модуля и устройства и обеспечения функционирования основных узлов модуля;
источник питания (ИП) предназначен для питания функциональной части МВТУ и реле блока реле-повторителей БРП;
буферный регистр (БР) предназначен для фиксации позиционных кодов включения ключей выбора группы и номера ТУ;
блоки ключей (БК1 и БК2) предназначены для обеспечения токовой нагрузки модуля.
К КУКП-М +-----+ +-----+ +----------+ <---------->| СУ | | БР | | |--->Гр1 ТУ . | |<-->| |<-->| БК1 |--->Гр2 ТУ . | | | | | |--->Гр3 ТУ . | | | | | |--->Гр4 ТУ <---------->| | | | | |--->ТУВ | | | | | |--->ТУО | | | | +----------+ | | | | +----------+ | | | |<-->| |--->ТУ1 +-----+ +-----+ | БК2 |--->ТУ2 От БПКП +------+ | |--->ТУ3 =24В | ИП |На внутренние | |--->ТУ4 -------->| |нужды МВТУ: | |--->ТУ5 | |+5В,+-15В | |--->ТУ6 | |--------> | |--->ТУ7 | |На БРП | |--->ТУ8 | | =24В +----------+ | |--------> +------+
Рис. 35. Схема структурная модуля МВТУ
6.3.2. Выходными неинтерфейсными сигналами модуля МВТУ являются:
а) сигналы позиционного кода номера группы ТУ с уровнями:
высокий уровень (активное состояние) - от 20 до 24 В при токе нагрузки до 0,1 А;
низкий уровень (пассивное состояние) - не более 1 В.
б) сигналы позиционного кода номера ТУ в группе с уровнями:
низкий уровень (активное состояние)- не более 1 В при токе нагрузки до 0,1 А;
высокий уровень (пассивное состояние) - до 24 В.
6.3.3. Входными и выходными интерфейсными сигналами модуля МВТС-М являются сигналы обмена модуля с КУКП-М:
D0...D7 - сигналы данных;
ЗП - сигнал строба записи данных;
ЧТ - сигнал строба чтения данных;
1/2Б - сигнал выбора номера байта.
Уровни сигналов данной группы соответствуют: высокий уровень - от 3,5 до 5,5 В; низкий уровень - от 0 до 0,8 В.
6.3.4. Первым байтом в буферный регистр МВТУ записывается позиционный код номера группы ТУ, а вторым байтом записывается позиционный код номера ТУ в группе. Диаграмма сигналов обмена контроллера КУКП-М с модулем МВТУ приведена на рис.36.
---------+ +- - - -+ +- - - -+ ВМ3 ________|_____________|_______|________________|_______|_____t +-------+ +-------+ 1/2Б____________|_______|________________|_______|_______________t _____ _____ _____ _ _ _ _____ _____ _ _ _ _____ \ / \ / \ / \ / \ / \ / \ / D0...D7 Х NГрТУ Х N ТУ Х Х NГрТУ Х N ТУ Х Х NГрТУ _____/_\_____/_\_____/_\______/_\_____/_\_____/_\______/_\____t --------+ +----+ +---- - - -------------------- - - -------- ЗП ________|__|____|__|_________________________________________t ------------------------ - - + +-+ +----- - - + +-- ЧТ _____________________________|_____|_|_____|__________|____|_t
Рис. 36. Диаграмма сигналов обмена контроллера КУКП-М с модулем МВТУ
Защита цепей управления от несанкционированного включения при выходе из строя выходного полупроводникового ключа обеспечивается за счет того, что каждое реле блока реле-повторителей питается током двух ключей (выбор группы и элемента в группе) - монтажное И. Выход токовых ключей контролируется модулем и, в случае несоответствия кода на выходе ключей коду управления, все ключи модуля отключаются.
6.3.5. Габаритные размеры модуля МВТУ не превышают 30х255х260 мм. Масса модуля МВТУ не превышает 0,5 кг.
6.3.6. Питание модуля МВТУ обеспечивается от блока питания КПМ (БПКП) постоянным током напряжением (24+3,6-4,8) В. Ток, потребляемый модулем от блока питания, не превышает 0,3 А. Получаемаемое от БПКП напряжение ИП преобразовывает в ряд напряжений для собственных нужд:
а) стабилизированное напряжение 5 В для питания функциональной части модуля (основной канал источника);
б) стабилизированное напряжение 5 В (параметрический стабилизатор) для питания гальванически изолированных интерфейсных цепей модуля;
в) нестабилизированное напряжение 27 В для питания обмоток реле блока реле-повторителей.
6.3.7. Схема электрическая принципиальная модуля МВТУ приведена в приложении 3.785.003 ТО1 и содержит:
схему гальванической развязки входных интерфейсных сигналов (D1, VE1...VE12) и схему гальванической развязки выходных интерфейсных сигналов (D3...D10, VE13...VE20);
схему формирования сигналов записи и чтения состояний буферного регистра (D1, D2);
схему 16-ти разрядного буферного регистра (Е1...Е8);
фильтрующие цепочки (C1, R5...C16, R20);
источник питания (Е9).
6.4. Устройство и работа модуля МВИС
6.4.1. Модуль МВИС предназначен для ввода импульсных сигналов ТИИ. Модуль является пассивным элементом и работает под управлением КУКП-М. Структурная схема модуля МВИС приведена на рис.37. МВИС состоит из следующих основных узлов:
входной преобразователь (ВП) предназначен для нормирования входных сигналов, фильтрации высокочастотных составляющих сигналов и гальванического разделения цепей датчиков и схемы модуля;
счетчики импульсов (Сч1...Сч8) предназначены для подсчета импульсов, поступающих по 8-ми входным каналам;
мультиплексор (МХ) предназначен для вывода на линии данных информационных разрядов одного из восьми счетчиков по командам КУКП- М;
схема управления сбросом счетчиков (СУС) предназначена для сброса выбранного счетчика по команде КУКП-М;
схема управления модулем (СУ) предназначена для гальванической развязки цепей модуля и устройства и обеспечения функционирования основных узлов модуля;
генератор (Г) предназначен для нормирования минимальной длительности входных сигналов;
источник питания (ИП) предназначен для питания гальванически развязанных цепей датчиков и функциональной части МВИС.
Каналы ТИИ +-----+ +-----+ +-----+ +------+ К КУКП-М 1---->| ВП |--->| Сч1 |-->| МХ |------>| СУ |<-------> >| | +->|R | >| | | | . >| | | +-----+ >| | | | . >| | | . >| | | | . >| | | . >| |<------| |<-------> >| | | . >| | | | >| | | +-----+ >| | | | 8---->| |-+->| Сч8 |-->| | +---| | +-----+ |+>|R | +-----+ | +------+ | | || +-----+ | К узлам МВИС+-------+ +----+ | | || +-----+ | +5В | | =24В | | | | |+-| СУС |<------------+ <---------| ИП |<----- | Г |>-+ | | -| | | | | | | +--| | +5В | | +----+ | +-----+ +---<--| | +---------------------------------+ +-------+
Рис. 37. Схема структурная модуля МВИС
6.4.2. Входными неинтерфейсными сигналами модуля МВИС являются сигналы с параметрами, приведенными в п.3.8.
6.4.3. Входными и выходными интерфейсными сигналами модуля МВТС-М являются сигналы обмена модуля с КУКП-М:
D0...D7 - сигналы данных;
ЗП - сигнал строба записи данных;
ЧТ - сигнал строба чтения данных;
1/2Б - сигнал выбора номера байта.
Уровни сигналов данной группы соответствуют: высокий уровень - от 3,5 до 5,5 В; низкий уровень - от 0 до 0,8 В.
6.4.4. Импульсы с датчиков ТИИ поступают на входной преобразователь. Во входном преобразователе ВП импульсы через схему гальванической развязки (VE1...VE12) подаются на вход схемы формирования счетного импульса (D-вход триггера D12:5). На счетный вход триггера D12.2 подаются импульсы нормированной длительностью от внутреннего генератора Г. С выхода ВП (D12.2) импульсы с нормированной длительностью подаются на вход канального счетчика (D10:2).
При обращении к МВИС процессор КУКП-М устанавливает на шине ДАННЫХ код номера канала ТИИ и сигналы ВМ4=0, 1/2Б=0 и через необходимый промежуток сигнал ЗАПИСЬ=0. Последующим считыванием по сигналу ЧТЕНИЕ=0 процессор КУКП-М инициирует ввод двух байтов кода - значения счетчика выбранного канала. При обработке телемеханической функции передачи в УПУ группы значений ТИИ с последующим сбросом счетчиков, эта операция производится по выбранному счетчику отдельно сигналом СБРОС=0. Диаграмма сигналов обмена контроллера КУКП-М с модулем МВИС, представлена на рис. 38.
-------+ +-- ВМ4 _______|__________________________________________________|_t +---------+ +---------+ 1/2Б___________________|_________|_______________|_________|____t ___ ______ _____ _____ _____ ______ ______ ____ \ / \ / \ / \ / \ / \ / \ / D0..D7 Х N ТИИ Х 1БАЙТ Х 2БАЙТ Х N ТИИ Х 1 БАЙТ Х 2 БАЙТ Х ___/_\______/_\_____/_\_____/_\_____/_\______/_\______/_\___t -------+ +--------------------+ +------------------------- ЗП _______|__|____________________|___|________________________t --------------+ +---+ +-----------+ +----+ +-------- ЧТ ______________|___|___|___|___________|____|____|___|_______t -------------------------------------------------------+ +-- СБРОС______________________________________________________|__|_t
Рис. 38. Диаграмма сигналов обмена контроллера КУКП-М с модулем МВИС
6.4.5. Габаритные размеры модуля МВИС не превышают 30х255х260 мм. Масса модуля МВИС не превышает 0,5 кг.
6.4.6. Питание модуля МВИС обеспечивается от блока питания КПМ (БПКП) постоянным током напряжением (24+3,6-4,8) В. Ток, потребляемый модулем от блока питания, не превышает 0,2 А. Получаемаемое от БПКП напряжение ИП преобразовывает в ряд напряжений для собственных нужд:
а) стабилизированное напряжение 5 В для питания функциональной части модуля (основной канал источника);
б) стабилизированное напряжение 5 В (параметрический стабилизатор) для питания гальванически изолированных цепей датчиков ТИИ.
6.4.7. Схема модуля МВИС (приложение 3.785.003 ТО1) содержит:
схему формирования входных сигналов (R1...R8, C1...C8);
схему гальванической развязки (VE1...VE8);
схему генератора импульсов (С9, R9, D1);
схему формирования сигналов ЧТЕНИЕ и СБРОС (D2...D9).
Модуль содержит 8 однотипных каналов счета импульсов, каждый из которых содержит:
схему формирования счетного импульса (D12, D13);
схему 16-ти разрядного счетчика (D10, D11);
шинные формирователи (D14, D15).
6.5. Устройство и работа КТМС-М
6.5.1. КТМС-М предназначен для последовательного обмена информацией между УКПМ и УПУ по каналам ТЧ. Характеристики каналов приведены в п.3.4.5.
КТМС-М конструктивно выполнен в виде закрытого модуля с габаритными размерами не более 30х255х260 мм.
Масса КТМС-М не превышает 0,5 кг.
6.5.2. Питание КТМС-М осуществляется от блока питания КПМ (БПКП) напряжением 24(+3,6-4,8) В постоянного тока. Мощность, потребляемая КТМС-М от БПКП, не превышает 4,5 Вт.
6.5.3. Входные и выходные интерфейсные сигналы, предназначенные для обмена с КУКП-М:
а) двунаправленные сигналы ДАННЫЕ;
б) выходной сигнал ОТВЕТ. Состоянию ОТВЕТ=0 соответствует готовность КТМС-М к обмену данными с КУКП-М, состоянию ОТВЕТ=1 - подтверждение приема данных;
в) входной сигнал РШ КТМС. Состоянию РШ КТМС соответствует истинность информации на линиях ДАННЫЕ;
г) входной сигнал начальной установки процессора НУ. После выполнения последовательности НУ=0 и НУ=1 происходит рестарт процессора КТМС-М.
6.5.4. Уровни напряжений входных и выходных интерфейсных сигналов обмена КТМС-М с КУКП-М соответствуют: "высокий уровень" - от 2,4 до 5,25 В, "низкий уровень" - от 0 до 0,8 В.
6.5.5. Схема структурная КТМС-М приведена на рис.39. КТМС-М состоит из следующих основных узлов:
блок процессорный (ПБ) служит для управления режимами работы контроллера. Осуществляет прием-передачу информации и ее обработку;
576 кГц Выход +---+ +---+ +---------+ +----+ ЧМ | Г |->| ДЧ|----------------------->-| М |->| УС2|---> | | | |<-++----+ | +----+ | | | |---> +---+ +---+ +| НП | |>| СПС| +---------+ +----+ | | | | |-+ +----+ | +----+ | +----+ | | | +-^-----+ К КУКП-М Вход | +----+ +>| ДМ |->-| |<--------> ЧМ +----+ +----+ +----++>|СВПС| | | | ПБ | . --->-| УС1|->| ПФ |->| УО |->| |-->| | | | . --->-| | | | | | | | | | | |<--------> +----+ +----+ +----+ +----+ +----+ +-------+ | +----+К р/ст +----->| БУР|---> | |---> +----+
Рис. 39. Схема структурная КТМС-М
модулятор (М) предназначен для модуляции последовательного кода гармоническим сигналом;
узлы согласования (УС) предназначены для согласования физических параметров приемника и передатчика КТМС-М с линией связи (ЛС);
блок управления радиостанцией (БУР) служит для управления режимами ПРИЕМ/ПЕРЕДАЧА;
полосовой фильтр (ПФ) служит для ослабления на входе приемника уровня гармонических сигналов, значения частот которых лежат за пределами установленной полосы пропускания;
усилитель-ограничитель (УО) предназначен для усиления гармонических сигналов, принятых из ЛС, и согласования их с уровнями сигналов для микросхем серии 564;
схема выделения периодов сигналов (СВПС) обеспечивает формирование коротких импульсов по началу каждого периода входной частоты, поступающей с УС;
делитель частоты (ДЧ) служит для задания скорости обмена информацией в ЛС;
демодулятор (ДМ) предназначен для преобразования импульсной последовательности из СВПС в последовательный код;
схема побитной синхронизации (СПС) служит для синхронизации принимаемой из ЛС информации;
кварцевый генератор (Г) служит для формирования опорной частоты 576 кГц;
наборное поле (НП) предназначено для задания параметров обмена на канале ЧМ.
6.5.6. Адресация УКПМ на канале ТЧ производится монтажом перемычек на ответной части разъема "АДРЕС" на лицевой панели КТМС-М в соответствии с табл.8.
Схема электрическая принципиальная КТМС-М приведена в приложении 3.785.003 ТО1.
Блок процессорный реализован на микросхемах D1...D8. Модулятор выполнен на элементах D12.1, D16, D20, D31.1, D32, D34, D35, VT5, VT8...VT11. С помощью резистора R66 устанавливается уровень выходного напряжения передатчика.
Узел согласования передатчика с линией связи реализован на транзисторах VT10, VT11 и трансформаторе TV2. Свечению индикатора VD8 соответствует наличие несущей на выходе передатчика. Узел согласования приемника с линией выполнен на трансформаторе TV1.
Блок управления радиостанцией выполнен на транзисторе VT2 и оптопаре VE2.
Полосовой фильтр приемника КТМС-М реализован на микросхемах D13, D15, D19.
Детектор линейного сигнала выполнен на элементах D14.3, D29, D28.2, VT12. Свечение индикатора VD9 соответствует наличию несущей на входе приемника.
Таблица 8 Задание адреса УКПМ на линии ТЧ
------------------------------------------------------------------ Адрес | Наличие перемычек между контактами разъема "АДРЕС" УКПМ | модуля КТМС-М -------------|---------------------------------------------------- HEX | DEC | 5 и 3 | 5 и 4 | 5 и 7 | 5 и 8 | 5 и 2 | 5 и 1 ------|------|--------|--------|--------|--------|--------|------- 00 | 0 | есть | есть | есть | есть | есть | есть 01 | 1 | есть | есть | есть | есть | есть | нет 02 | 2 | есть | есть | есть | есть | нет | есть 03 | 3 | есть | есть | есть | есть | нет | нет 04 | 4 | есть | есть | есть | нет | есть | есть 05 | 5 | есть | есть | есть | нет | есть | нет 06 | 6 | есть | есть | есть | нет | нет | есть 07 | 7 | есть | есть | есть | нет | нет | нет 08 | 8 | есть | есть | нет | есть | есть | есть 09 | 9 | есть | есть | нет | есть | есть | нет 0A | 10 | есть | есть | нет | есть | нет | есть 0B | 11 | есть | есть | нет | есть | нет | нет 0C | 12 | есть | есть | нет | нет | есть | есть 0D | 13 | есть | есть | нет | нет | есть | нет 0E | 14 | есть | есть | нет | нет | нет | есть 0F | 15 | есть | есть | нет | нет | нет | нет 10 | 16 | есть | нет | есть | есть | есть | есть 11 | 17 | есть | нет | есть | есть | есть | нет 12 | 18 | есть | нет | есть | есть | нет | есть 13 | 19 | есть | нет | есть | есть | нет | нет 14 | 20 | есть | нет | есть | нет | есть | есть 15 | 21 | есть | нет | есть | нет | есть | нет 16 | 22 | есть | нет | есть | нет | нет | есть 17 | 23 | есть | нет | есть | нет | нет | нет 18 | 24 | есть | нет | нет | есть | есть | есть 19 | 25 | есть | нет | нет | есть | есть | нет 1A | 26 | есть | нет | нет | есть | нет | есть 1B | 27 | есть | нет | нет | есть | нет | нет 1C | 28 | есть | нет | нет | нет | есть | есть 1D | 29 | есть | нет | нет | нет | есть | нет 1E | 30 | есть | нет | нет | нет | нет | есть 1F | 31 | есть | нет | нет | нет | нет | нет ------------------------------------------------------------------
Усилитель-ограничитель собран на микросхемах D23, D27 и диодах VD6, D7.
Схема выделения периодов сигнала реализована на микросхемах D9.4, D12.5, D30, D31.3, VT6.
Делитель частоты выполнен на микросхемах D11, D12.2, D12.3, D17, D21, D24.
Демодулятор собран на микросхемах D9.5, D12.6, D14.4, D31.2, D31.4, D33, D35, D36, D38.
Схема побитной синхронизации выполнена на микросхемах D10.2, D14.1, D14.2, D18, D22, D37.1.
Кварцевый генератор выполнен на микросхемах D9.1, D9.2, D9.3 и кварцевом резонаторе G2.
Питание элементов схемы осуществляется от внутреннего источника питания контроллера, реализованного на транзисторах VT13...VT18, трансформаторе TV3 и оптроне VE1. Свечение индикатора VD22 соответствует наличию основного напряжения плюс 5 В на выходе источника питания. Регулировкой резистора R61 устанавливают уровень этого напряжения в пределах +-0,25 В от номинального значения.
6.5.7. Режим передачи данных в ЛС
6.5.7.1. Режим передачи определяется моментом перевода сигнала OUT микросхемы D3 в состояние логической "1". Сигнал является разрешением для работы триггеров D25 модулятора.
Импульсы с ДЧ, частота следования которых равна скорости передачи информации по ЛС, поступают на входы синхронизации триггеров D26.2 и D28.1. Триггер D26.2 по фронту синхроимпульса с ДЧ фиксирует уровень текущего бита передаваемой информации (линия А3 порта А микросхемы D8). Информация с выхода триггера D28.1 поступает в качестве кода пересчета на управляемый делитель частоты (микросхемы D16, D20, D31.1) модулятора. Таким образом на выходе управляемого делителя частоты в течение периода бита выводимой информации устанавливается меандр с характеристической частотой, значение которой соответствует коду пересчета. Этот меандр преобразуется в гармонический сигнал с помощью активного низкочастотного фильтра с частотой среза 3,4 кГц (микросхема D32) и через УС передатчика выдается в ЛС.
По фронту синхроимпульса с ДЧ взводится триггер прерывания по приему D37.2. Выход триггера D37.2 соединен со входом прерывания RST5.5 центрального процессора D3. По прерыванию от триггера приема процессор КТМС-М кратковременно выставляет сигнал сброса триггера прерывания D37.2 (линия А4 порта А D8) для подготовки к следующему запросу и инициирует вывод на линию А3 порта А D8 очередного бита. Закончив передачу процессор блокирует передачу информации (выход OUT D3 принимает значение лог."0") и переходит в режим приема из ЛС.
6.5.8. Скорость передачи информации в ЛС задается путем изменения коэффициента пересчета (N) ДЧ.
Коэффициент пересчета скорости передачи определяется по формуле: Nск = 576000 / V*60, (1)
где V- скорость обмена информацией, Бод.
Выраженное в двоичной форме значение коэффициента Nск устанавливается на колодке X5 КТМС-М монтажом перемычек. Соответствие весовых коэффициентов двоичного значения Nск приведено в табл.9. В табл.10 приведены коэффициенты пересчета скорости, расчитанные по (1).
Таблица 9
+---------------------------------------------------------------+ | Скорость обмена, Бод | Коэффициент пересчета скорости, | | | устанавливаемый на контактах Х5 | | | 5 6 7 4 1 8 9 2 | |--------------------------+------------------------------------| | 50 | 1 1 0 0 0 0 0 0 | | 100 | 0 1 1 0 0 0 0 0 | | 200 | 0 0 1 1 0 0 0 0 | | 300 | 0 0 1 0 0 0 0 0 | | 600 | 0 0 0 1 0 0 0 0 | +---------------------------------------------------------------+
Значение "0" весового коэффициента по табл.9 означает соединение соответствующего контакта X5 с контактом 3 X5 , значение "1" весового коэффициента означает соединение соответствующего контакта X5 с контактом 10 X5.
6.5.9. Характеристические частоты передачи информации в ЛС задаются путем изменения коэффициента пересчета управляемого делителя частоты модулятора.
Коэффициент пересчета частоты передачи определяется по формуле: Nпер = 576000 / 4*Fвых, (2)
где Fвых- характеристическая частота передачи, Гц.
Выраженное в двоичной форме значение коэффициента Nпер устанавливается на колодках Х7 и Х8 КТМС-М монтажом перемычек. В табл.10 приведены коэффициенты пересчета скорости, расчитанные по (2). Правила установки частот передачи следующие:
1) из табл.10 выбираются значение частоты передачи, соответствующее значению логической "единицы" и заносится в первую строку шаблона табл.11;
2) из табл.10 выбираются значение частоты передачи, соответствующее значению логического "нуля" и заносится во вторую строку шаблона табл.11;
3) по шаблону табл.11 рассматриваются раздельно по колонкам соответствующие значения весовых коэффициентов:
Таблица 10
+------------------------------------------------------------+ | Частота,| Nпер | Nпер || Частота,| Nпер | Nпер | | Гц | DEC | BIN || Гц | DEC | BIN | |---------+------+------------++---------+------+------------| | 3429 | 42 | 00101010 || 1618 | 89 | 01011001 | | 3349 | 43 | 00101011 || 1600 | 90 | 01011010 | | 3273 | 44 | 00101100 || 1582 | 91 | 01011011 | | 3200 | 45 | 00101101 || 1565 | 92 | 01011100 | | 3130 | 46 | 00101110 || 1548 | 93 | 01011101 | | 3064 | 47 | 00101111 || 1532 | 94 | 01011110 | | 3000 | 48 | 00110000 || 1516 | 95 | 01011111 | | 2939 | 49 | 00110001 || 1500 | 96 | 01100000 | | 2880 | 50 | 00110010 || 1485 | 97 | 01100001 | | 2824 | 51 | 00110011 || 1469 | 98 | 01100010 | | 2769 | 52 | 00110100 || 1455 | 99 | 01100011 | | 2717 | 53 | 00110101 || 1440 | 100 | 01100100 | | 2667 | 54 | 00110110 || 1426 | 101 | 01100101 | | 2618 | 55 | 00110111 || 1412 | 102 | 01100110 | | 2571 | 56 | 00111000 || 1398 | 103 | 01100111 | | 2526 | 57 | 00111001 || 1385 | 104 | 01101000 | | 2483 | 58 | 00111010 || 1371 | 105 | 01101001 | | 2441 | 59 | 00111011 || 1358 | 106 | 01101010 | | 2400 | 60 | 00111100 || 1346 | 107 | 01101011 | | 2361 | 61 | 00111101 || 1333 | 108 | 01101100 | | 2323 | 62 | 00111110 || 1321 | 109 | 01101101 | | 2286 | 63 | 00111111 || 1309 | 110 | 01101110 | | 2250 | 64 | 01000000 || 1297 | 111 | 01101111 | | 2215 | 65 | 01000001 || 1286 | 112 | 01110000 | | 2182 | 66 | 01000010 || 1274 | 113 | 01110001 | | 2149 | 67 | 01000011 || 1263 | 114 | 01110010 | | 2118 | 68 | 01000100 || 1252 | 115 | 01110011 | | 2087 | 69 | 01000101 || 1241 | 116 | 01110100 | | 2057 | 70 | 01000110 || 1231 | 117 | 01110101 | | 2028 | 71 | 01000111 || 1220 | 118 | 01110110 | | 2000 | 72 | 01001000 || 1210 | 119 | 01110111 | | 1973 | 73 | 01001001 || 1200 | 120 | 01111000 | | 1946 | 74 | 01001010 || 1190 | 121 | 01111001 | | 1920 | 75 | 01001011 || 1180 | 122 | 01111010 | | 1895 | 76 | 01001100 || 1171 | 123 | 01111011 | | 1870 | 77 | 01001101 || 1161 | 124 | 01111100 | | 1846 | 78 | 01001110 || 1152 | 125 | 01111101 | | 1823 | 79 | 01001111 || 1143 | 126 | 01111110 | | 1800 | 80 | 01010000 || 1134 | 127 | 01111111 | | 1778 | 81 | 01010001 || 1125 | 128 | 10000000 | | 1756 | 82 | 01010010 || 1116 | 129 | 10000001 | | 1735 | 83 | 01010011 || 1108 | 130 | 10000010 | | 1714 | 84 | 01010100 || 1099 | 131 | 10000011 | | 1694 | 85 | 01010101 || 1091 | 132 | 10000100 | | 1674 | 86 | 01010110 || 1083 | 133 | 10000101 | | 1655 | 87 | 01010111 || 1075 | 134 | 10000110 | | 1636 | 88 | 01011000 || 1067 | 135 | 10000111 | +------------------------------------------------------------+
- одинаковые значения "единиц" первых двух строк одной колонки означают связь соответствующего этой колонке контакта колодки X7 (строка 1) с контактом 4 колодки X8;
Таблица 11
+------------------------------------------------------------+ | Nпер логической "единицы" | | | | | | | | | |----------------------------+---+---+---+---+---+---+---+---| | Nпер логического "нуля" | | | | | | | | | |----------------------------+---+---+---+---+---+---+---+---| | Контакты колодки Х7 | 1 | 8 | 7 | 2 | 3 | 6 | 5 | 4 | |----------------------------+---+---+---+---+---+---+---+---| | Контакты колодки Х8 | | | | | | | | | +------------------------------------------------------------+
- одинаковые значения "нулей" первых двух строк одной колонки означают связь соответствующего этой колонке контакта колодки X7 (строка 1) с контактом 3 колодки X8;
- при неодинаковых значениях первых двух строк одной колонки и значении "единицы" первой строки означает связь соответствующего этой колонке контакта колодки X7 (строка 1) с контактом 2 колодки X8;
- при неодинаковых значениях первых двух строк одной колонки и значении "нуля" первой строки означает связь соответствующего этой колонке контакта колодки X7 (строка 1) с контактом 1 колодки X8.
В табл.12 приведен пример распределения связей между контактами колодок Х7 и Х8 при установке частот 2571 (логический "нуль") и 2717 (логическая "единица") Гц.
Таблица 12
+------------------------------------------------------------+ | Nпер логической "единицы" | 0 | 0 | 1 | 1 | 0 | 1 | 0 | 1 | |----------------------------+---+---+---+---+---+---+---+---| | Nпер логического "нуля" | 0 | 0 | 1 | 1 | 1 | 0 | 0 | 0 | |----------------------------+---+---+---+---+---+---+---+---| | Контакты колодки Х7 | 1 | 8 | 7 | 2 | 3 | 6 | 5 | 4 | |----------------------------+---+---+---+---+---+---+---+---| | Контакты колодки Х8 | 3 | 3 | 4 | 4 | 1 | 2 | 3 | 2 | +------------------------------------------------------------+
6.5.10. Входной сигнал из ЛС через УС приемника поступает на вход ПФ, который обеспечивает ослабление сигналов, значения частот которых расположены за пределами его полосы пропускания. С выхода ПФ сигнал выделенного спектра поступает на УО, в котором происходит преобразование гармонических сигналов в прямоугольные. По началу каждого периода преобразованного сигнала СВПС вырабатывает импульсы длительности частоты генератора Г. Последовательность импульсов - меток начала периодов поступает на вход схемы широтного компаратора (ШК) (микросхемы D12.6, D31.4, D35, D38). Порог срабатывания компаратора (средняя частота) устанавливается монтажом перемычек на колодке X12. На выходе ШК формируется признак одной из характеристических частот в зависимости от интервала времени между двумя соседними импульсами с СВПС. Этот признак поступает на триггеры D33, D36.1 демодулятора, которые преобразуют полученные сигналы в несинхронную последовательность двоичных данных в соответствии с принимаемой информацией. Синхронизация принимаемых данных производится СПС.
6.5.11. Значение средней частоты для ШК определяется по формуле: Nпр = 576000 / Fн+Fв, (3)
где Fн и Fв - соответственно нижняя и верхняя несущие частоты принимаемой информации, Гц.
Значение Nпр, вычисленное по (3), в двоичном представлении устанавливается на колодке X12 КТМС-М монтажом перемычек. Соответствие весовых коэффициентов разрядов двоичного представления значения Nпр приведено в табл.13.
Таблица 13
+---------------------------------------------------------------+ |Разрядные коэффициенты Nпр| 7 6 5 4 3 2 1 0 | |--------------------------+------------------------------------| |Контакты колодки Х12 | 1 7 8 2 4 5 6 3 | +---------------------------------------------------------------+
Значение "0" весового коэффициента по табл.13 означает соединение соответствующего контакта X12 с контактом 9 X12, значение "1" весового коэффициента означает соединение соответствующего контакта X12 с контактом 10 X12.
6.5.12. В режиме приема данных из ЛС процессор деблокирует триггер D10.1 по линии А2 порта А D8 и устанавливает его в состояние "1" кратковременным изменением состояния на линии А1 порта А D8. Далее процессор деблокирует по линии А5 порта А D8 триггер прерывания по приему данных D37.2. При обнаружении 6-ти периодов несущей на входе приемника достаточной амплитуды (для этого в начале посылки отправляются "лидирующие нули") триггер D36.1 демодулятора деблокируется и готов к приему стартового бита посылки. По стартовому биту информации (значение "1") триггер D36.1 устанавливается в состояние "0". С его инверсного выхода сигнал переводом триггера D10.2 в состояние "1" запускает СПС. Последняя генерирует на выходе триггера D37.1 прямоугольные импульсы, передний фронт которых фиксирует в триггере D36.2 бит принимаемых данных в его середине и взводит триггер прерывания по приему D37.2.
По прерыванию приема процессор считывает бит данных с триггера D36.2 последовательным каналом ввода и сбрасывает триггер прерывания по приему D37.2. Последующие биты информации считываются аналогичным образом.
6.5.13. Работа КТМС-М с радиостанцией
6.5.13.1. КТМС-М обеспечивает работу с радиостанцией, имеющей вход для подключения микротелефонной трубки (МТТ).
При работе с радиостанцией контроллер подключается параллельно МТТ:
1) выход передатчика подключается параллельно микрофону;
2) вход приемника - параллельно телефонному капсюлю;
3) цепи сигналов управления радиостанцией подключаются к соответствующим контактам разъема ЛИНИЯ контроллера КТМС-М.
6.5.13.2. При работе совместно с радиостанцией типа "ЭСТАКАДА- IP" возможно непосредственное подключение КТМС-М к блоку приемопередатчика радиостанции. Схема подключения КТМС-М к радиостации типов "ЭСТАКАДА-IP" приведена на рис.40.
+--------------------+ +--------------------+ | УКПМ-2.1 |"ЛИНИЯ" "НЧ" | ПРИЕМОПЕРЕДАТЧИК | | +----------------+-----+ +-----+----------------+ | | | Цепь |Конт.| |Конт.| Цепь | | | |----------------+-----| |-----+----------------| | | | ПРМ-1 | 1 |------------| 11 |ВЫХОД НЧ ПРМ | | | |----------------+-----| |-----+----------------| | | | ПРМ-2 | 2 |-----+ +--| 4 |12В КОММУТ. | | | |----------------+-----| | | |-----+----------------| | | | ПРД-2 | 3 |-----+---+--| 1 |ВХОД НЧ ПРД | | | |----------------+-----| | | |-----+----------------| | | | ПРД-1 | 4 |---------+--| 10 | КОРПУС | | | |----------------+-----| +-----| |-----+----------------| | | | УПР.РС4 | 5 |---+-----+--| 14 |ПРИЕМ(ПЕРЕДАЧА) | | | |----------------+-----| +-+ | |-----+----------------| | | | УПР.РС5 | 6 | |/| +--| 7 |12В | | | |----------------+-----| +-+R +-----+----------------+ | | | УПР.РС2 | 7 |---+10 кОм | | | +----------------+-----+ | ИП2.000.278 | +--------------------+ +--------------------+
Рис.40. Схема подключения контроллера КТМС-М к блоку "ПРИЕМОПЕРЕДАТЧИК" радиостанции типа 18Р22С "Эстакада-1Р"
6.6. Описание модуля блока питания устройства (БПКП)
6.6.1. БПКП предназначен для питания модулей и контроллеров КПМ постоянным током напряжением (24+3,6-4,8) В.
6.6.2. Первичное питание БПКП (устройства) осуществляется от основного источника однофазной сети переменного тока напряжением (220+33-44) В и частотой (50+-2,5) Гц или от резервного источника постоянного тока напряжением (24+3,6-4,8) В.
6.6.3. Мощность, потребляемая БПКП от основного или резервного источника, не превышает 30 ВА при номинальной нагрузке.
6.6.4. Номинальное значение выходного напряжения БПКП - 24 В.
6.6.5. БПКП обеспечивает работу в диапазоне значений тока нагрузки от 0,2 до 1,2 А.
6.6.6. Суммарная нестабильность выходного напряжения, вызванная изменением величины входного напряжения в пределах допустимых значений, частоты питающего сетевого напряжения в пределах допустимых значений, тока нагрузки и температуры в допустимых пределах не превышает 5 %.
6.6.7. Сопротивление изоляции, измеренное между входными клеммами "220V" и выходными цепями БПКП при нормальных климатических условиях, не менее 20 МОм.
6.6.8. Габаритные размеры БПКП не более 65х255х260 мм.
6.6.9. Масса БПКП не превышает 1,3 кг.
6.6.10. Устройство и работа БПКП
Схема структурная БПКП приведена на рис.41. БПКП состоит из сетевого фильтра, выпрямителя, конвертора, схемы управления конвертором и устройства включения резервного питания.
Схема электрическая принципиальная БПКП приведена в приложении 3.785.003 ТО1.
+---------+ +-------------+ Сеть ~220 В | Сетевой | | | ----------->| |--->| Выпрямитель |---+ | фильтр | | | | +---------+ +-------------+ | +----------------------------+ +-------------+ | +-------------------+ | Схема | +-->| Стабилизирующий | | управления | | |---->+ | конвертором |---->| конвертор | | Выход =24 В +-------------+ +-------------------+ |-----------> Резервное +--------------------+ | напряжение 24 В | Устройство | | ------------------>| включения |---->+ | резервного питания | +--------------------+
Рис. 41. Схема структурная БПКП
Сетевой фильтр состоит из конденсаторов C1, C2, C3, C4, дроcселей L1, L2 и используется для снижения уровня индустриальных радиопомех в цепях первичного питания, а также излучаемых устройством импульсных помех в сеть.
Сетевое напряжение 220 В с сетевого фильтра поступает на выпрямитель, выполненный на диодах VD2...VD5 и конденсаторах фильтра C5, C6.
Выпрямленное сетевое напряжение поступает на конвертор, выполненный на транзисторах VT5, VT4, диодах VD9, VD10, VD12, VD16, резисторах R10, R11, R12, R13, R16, конденсаторах C8, C9, C11, C12 и трансформаторе TV1.
Конвертор выполнен по схеме с обратным включением силового диода VD16 во вторичной обмотке. После подачи напряжения на конвертор транзистор VT5 открывается током через цепочку R11, R12, R13 и ток через обмотку I трансформатора (ток коллектора транзистора VT5 IVT5k) растет, вызывая нарастание магнитного потока в магнитопроводе трансформатора (рис. 42). ЭДС положительной обратной связи обмотки III способствует лавинообразному открыванию транзистора VT5. Полярность ЭДС обмотки II в период Ti такова, что диод VD16 закрыт и нагрузка блока питается током разряда конденсаторов фильтра C11 и C12. Происходит запасание магнитной энергии в магнитопроводе трансформатора. Ток в обмотке I трансформатора (IVT5k) нарастает до тех пор, пока падение напряжения на резисторе R16 через конденсатор C9 не откроет транзистор VT4. В этот момент VT5 прикрывается и ток обмотки I (IVT5k) резко уменьшается.
IVT5k| | /| /| | / | / | | / | / | IVT5kср| _/_ _|_ _ _ _ _ _ _ _ _/_ _| | / | / | |/ |_______________/ |_______ 0+------------------------------------t | Ti | Tp | |<--->|<------------->|
Рис. 42. Форма тока коллектора транзистора VT5. Здесь Ti и Tp- длительность импульса и паузы соответственно
Нарастание магнитного потока в трансформаторе прекращается, полярность ЭДС на обмотках трансформатора меняется на обратную и происходит лавинообразный процесс запирания транзистора VT5. Диод VD12 служит для форсирования процесса запирания транзистора VD5. Конденсатор C9 разряжается через диоды VD9, VD10 и резистор R16. Полярность ЭДС обмотки II трансформатора в период Tp такова, что диод VD16 открыт и запасенная в магнитопроводе энергия передается в нагрузку и на заряд емкостей фильтра C11 и C12 (рис. 43). Дроссель Е1 сглаживает короткие выбросы выходного напряжения напряжения блока.
| +U(II)|-----+ +---------------+ +---- | | | | | 0_|-----+-----+---------------+-----+-------t | | | | | -U(II)| +-----+ +-----+ | | | | | Ti | Tp | |<--->|<------------->|
Рис. 43. Форма напряжения на обмотке II трансформатора TV1. Здесь Ti и Tp- длительность импульса и паузы соответственно
Схема управления конвертором выполнена на транзисторе VT1, диоде VD11, стабилитроне VD8, резисторах R4...R6, R8 и конденсаторе C7. ЭДС обмотки IV трансформатора пропорциональна ЭДС выходной обмотки. Часть напряжения на конденсаторе C7, пропорциональная ЭДС обмотки II трансформатора, сравнивается с опорным напряжением на стабилитроне VD8 и разность напряжений определяет значение тока коллектора транзистора VT1 и, следовательно, момент открывания транзистора VT4. Таким образом обеспечивается частичная стабилизация выходного напряжения БПКП от колебаний тока нагрузки.
Устройство беспрерывного переключения на источник резервного питания служит для обеспечения непрерывного функционирования УКПМ при пропадании сетевого напряжения основного источника и выполнено на транзисторах VT2, VT3, диодах VD6, VD7, VD13, VD15, стабилитроне VD14, резисторах R3, R7, R9, R14, R15 и конденсаторе C10.
Напряжение резервного источника питания подается на устройство с клемм X1.1, X1.2 через предохранитель FU2, тумблер S2, и защитный диод VD6.
Индикация наличия резервного питания, целостности предохранителя и включения тумблера, производится индикатором VD1. Диод VD6 предохраняет светодиод VD1 от повреждения при ошибочной смене полярности резервного питания.
При наличии напряжения сети 220 В и функционирующем конверторе, отрицательное напряжение на конденсаторе C10, c делителя напряжения R15, VD13 поступает на базу транзистора VT3 и запирает его. Транзистор VT2 при этом закрыт за счет внутренних резисторов смещения базы и источник резервного питания отключен.
При пропадании сети 220 В или неисправном конверторе запирающее напряжение на базе транзистора VT3 пропадает и транзистор открывается током через R7. Током коллектора VT3 открывается транзистор VT2 и резервный источник питания оказывается подключенным к нагрузке БПКП. Стабилитрон VD14 служит для форсирования переключения транзистора VT3, a диод VD13 защищает базовый переход транзистора VT3.
6.7. Устройство блока клеммных соединений (БКС-М)
6.7.1. БКС-М предназначен для выполнения внешнего монтажа цепей устройства на объекте. Соединения выполняются на клеммных колодках, обеспечивающих использование проводников с сечением жил до 2,5 мм2.
6.7.2. БКС-М конструктивно выполнен в виде блока с размерами не более 310х385х115 мм.
6.7.3. БКС-М содержит четыре 48-ми контактные клеммные колодки для внешних подключений устройства. Колодки обеспечивают зажим оголенных концов проводников с сечением проводников не более 2,5 мм2. Схема электрическая БКС-М приведена в приложении 3.785.003 ТО1.
6.7.4. Доступ к клеммным колодкам обеспечивается после снятия крышки БКС-М.
6.7.5. БКС-М закрепляется на вертикальной несущей плоскости с помощью 4-х винтов М5.
7. УКАЗАНИЕ МЕР БЕЗОПАСНОСТИ
7.1. К работе с устройством допускаются лица, ознакомленные с настоящим документом, а также прошедшие инструктаж по технике безопасности при работе с электрооборудованием, питаемым напряжением 220 В.
7.2. При подключении устройства к сети электропитания первым должен подключаться провод "З" (заземление) к контуру защитного заземления.
7.3. При проведении всех видов технического обслуживания следует производить проверку электрического сопротивления изоляции между закороченными клеммами сетевого питания и выходными цепями источника питания.
8. ХАРАКТЕРНЫЕ НЕИСПРАВНОСТИ И СПОСОБЫ ИХ УСТРАНЕНИЯ
8.1. Перечень неисправностей, вероятные причины появления и способы их устранения приведены в табл. 14.
Таблица 14
+-----------------------------------------------------------------+ | | | | | Характерные неисправности, | Вероятная | Способ | | внешние проявления и допол- | причина | устранения | | нительные признаки | | | |----------------------------------+----------------+-------------| | | | | | 1.При включении тумблера | обрыв цепи | устранить | | "СЕТЬ" отсуствует свечение всех| шнура питания,| обрыв, | | индикаторов на лицевой плос- | неисправен | заменить | | кости КПМ | предохранитель| предохра- | | | | нитель | | | | | | 2.При включении тумблера |неисправен БПКП | заменить | | "СЕТЬ" отсутствует свечение ин-| | БПКП | | дикатора выходного напряжения | | | | | | | | 3.При включении тумблера | неисправен | Заменить | | "СЕТЬ" отсутствует свечение ин-| контроллер | контрол- | | дикатора на лицевой панели кон-| (модуль) | лер (мо- | | троллера (модуля) | | дуль) | +-----------------------------------------------------------------+
Приложение 1 Цепи внешних подключений БКС-М (УКПМ-2) Таблица 1-1 Цепи ввода сигналов с датчиков ТИТ
+-------------------------------------------------------------------+ |Колодка-|Усл.обозн.| Краткая характеристика цепи | |-контакт| цепи | | |--------+----------+-----------------------------------------------| | X2-02 | ТИТ1-1-1 |Высокопотенциальный ввод канала 01 ТИТ группы 1| | X2-04 | ТИТ1-0-1 |Низкопотенциальный ввод канала 01 ТИТ группы 1| | X2-06 | ТИТ2-1-1 |Высокопотенциальный ввод канала 02 ТИТ группы 1| | X2-08 | ТИТ2-0-1 |Низкопотенциальный ввод канала 02 ТИТ группы 1| | X2-10 | ТИТ3-1-1 |Высокопотенциальный ввод канала 03 ТИТ группы 1| | X2-12 | ТИТ3-0-1 |Низкопотенциальный ввод канала 03 ТИТ группы 1| | X2-14 | ТИТ4-1-1 |Высокопотенциальный ввод канала 04 ТИТ группы 1| | X2-16 | ТИТ4-0-1 |Низкопотенциальный ввод канала 04 ТИТ группы 1| | X2-18 | ТИТ5-1-1 |Высокопотенциальный ввод канала 05 ТИТ группы 1| | X2-20 | ТИТ5-0-1 |Низкопотенциальный ввод канала 05 ТИТ группы 1| | X2-22 | ТИТ6-1-1 |Высокопотенциальный ввод канала 06 ТИТ группы 1| | X2-24 | ТИТ6-0-1 |Низкопотенциальный ввод канала 06 ТИТ группы 1| | X2-26 | ТИТ7-1-1 |Высокопотенциальный ввод канала 07 ТИТ группы 1| | X2-28 | ТИТ7-0-1 |Низкопотенциальный ввод канала 07 ТИТ группы 1| | X2-30 | ТИТ8-1-1 |Высокопотенциальный ввод канала 08 ТИТ группы 1| | X2-32 | ТИТ8-0-1 |Низкопотенциальный ввод канала 08 ТИТ группы 1| | X2-01 | ТИТ1-1-2 |Высокопотенциальный ввод канала 01 ТИТ группы 2| | X2-03 | ТИТ1-0-2 |Низкопотенциальный ввод канала 01 ТИТ группы 2| | X2-05 | ТИТ2-1-2 |Высокопотенциальный ввод канала 02 ТИТ группы 2| | X2-07 | ТИТ2-0-2 |Низкопотенциальный ввод канала 02 ТИТ группы 2| | X2-09 | ТИТ3-1-2 |Высокопотенциальный ввод канала 03 ТИТ группы 2| | X2-11 | ТИТ3-0-2 |Низкопотенциальный ввод канала 03 ТИТ группы 2| | X2-13 | ТИТ4-1-2 |Высокопотенциальный ввод канала 04 ТИТ группы 2| | X2-15 | ТИТ4-0-2 |Низкопотенциальный ввод канала 04 ТИТ группы 2| | X2-17 | ТИТ5-1-2 |Высокопотенциальный ввод канала 05 ТИТ группы 2| | X2-19 | ТИТ5-0-2 |Низкопотенциальный ввод канала 05 ТИТ группы 2| | X2-21 | ТИТ6-1-2 |Высокопотенциальный ввод канала 06 ТИТ группы 2| | X2-23 | ТИТ6-0-2 |Низкопотенциальный ввод канала 06 ТИТ группы 2| | X2-25 | ТИТ7-1-2 |Высокопотенциальный ввод канала 07 ТИТ группы 2| | X2-27 | ТИТ7-0-2 |Низкопотенциальный ввод канала 07 ТИТ группы 2| | X2-29 | ТИТ8-1-2 |Высокопотенциальный ввод канала 08 ТИТ группы 2| | X2-31 | ТИТ8-0-2 |Низкопотенциальный ввод канала 08 ТИТ группы 2| +-------------------------------------------------------------------+
Примечание. Незадействованные входы ТИТ должны быть закорочены
с проводниками цепей ТИХ-0-Х на клеммной колодке БКС.
Таблица 1-2 Цепи ввода сигналов с датчиков ТИИ
+-------------------------------------------------------------------+ |Колодка-|Усл.обозн.| Краткая характеристика цепи | |-контакт| цепи | | |--------+----------+-----------------------------------------------| | X4-01 | ТИИ1-1-1 |Высокопотенциальный ввод канала 01 ТИИ группы 1| | X4-03 | ТИИ1-0-1 |Низкопотенциальный ввод канала 01 ТИИ группы 1| | X4-05 | ТИИ2-1-1 |Высокопотенциальный ввод канала 02 ТИИ группы 1| | X4-07 | ТИИ2-0-1 |Низкопотенциальный ввод канала 02 ТИИ группы 1| | X4-09 | ТИИ3-1-1 |Высокопотенциальный ввод канала 03 ТИИ группы 1| | X4-11 | ТИИ3-0-1 |Низкопотенциальный ввод канала 03 ТИИ группы 1| | X4-13 | ТИИ4-1-1 |Высокопотенциальный ввод канала 04 ТИИ группы 1| | X4-15 | ТИИ4-0-1 |Низкопотенциальный ввод канала 04 ТИИ группы 1| | X4-17 | ТИИ5-1-1 |Высокопотенциальный ввод канала 05 ТИИ группы 1| | X4-19 | ТИИ5-0-1 |Низкопотенциальный ввод канала 05 ТИИ группы 1| | X4-21 | ТИИ6-1-1 |Высокопотенциальный ввод канала 06 ТИИ группы 1| | X4-23 | ТИИ6-0-1 |Низкопотенциальный ввод канала 06 ТИИ группы 1| | X4-25 | ТИИ7-1-1 |Высокопотенциальный ввод канала 07 ТИИ группы 1| | X4-27 | ТИИ7-0-1 |Низкопотенциальный ввод канала 07 ТИИ группы 1| | X4-29 | ТИИ8-1-1 |Высокопотенциальный ввод канала 08 ТИИ группы 1| | X4-31 | ТИИ8-0-1 |Низкопотенциальный ввод канала 08 ТИИ группы 1| | X4-45 | +12 В |Положительный полюс источника питания датчиков | | X4-47 | -12 В |Отрицательный полюс источника питания датчиков | +-------------------------------------------------------------------+
Таблица 1-3 Цепи ввода сигналов с датчиков ТС
+-------------------------------------------------------------------+ |Колодка-|Усл.обозн.| Краткая характеристика цепи | |-контакт| цепи | | |--------+----------+-----------------------------------------------| | X7-01 | ТС1-1-1 |Высокопотенциальный ввод канала 01 ТС группы 1| | X7-03 | ТС -0-1 |Общий низкопотенциальный ввод датчиков группы 1| | X7-05 | ТС2-1-1 |Высокопотенциальный ввод канала 02 ТС группы 1| | X7-07 | ТС3-1-1 |Высокопотенциальный ввод канала 03 ТС группы 1| | X7-09 | ТС -0-1 |Общий низкопотенциальный ввод датчиков группы 1| | X7-11 | ТС4-1-1 |Высокопотенциальный ввод канала 04 ТС группы 1| | X7-13 | ТС5-1-1 |Высокопотенциальный ввод канала 05 ТС группы 1| | X7-15 | ТС -0-1 |Общий низкопотенциальный ввод датчиков группы 1| | X7-17 | ТС6-1-1 |Высокопотенциальный ввод канала 06 ТС группы 1| | X7-19 | ТС7-1-1 |Высокопотенциальный ввод канала 07 ТС группы 1| | X7-21 | ТС -0-1 |Общий низкопотенциальный ввод датчиков группы 1| | X7-23 | ТС8-1-1 |Высокопотенциальный ввод канала 08 ТС группы 1| | X7-25 | ТС1-1-2 |Высокопотенциальный ввод канала 01 ТС группы 2| | X7-27 | ТС -0-2 |Общий низкопотенциальный ввод датчиков группы 2| | X7-29 | ТС2-1-2 |Высокопотенциальный ввод канала 02 ТС группы 2| | X7-31 | ТС3-1-2 |Высокопотенциальный ввод канала 03 ТС группы 2| | X7-33 | ТС -0-2 |Общий низкопотенциальный ввод датчиков группы 2| | X7-35 | ТС4-1-2 |Высокопотенциальный ввод канала 04 ТС группы 2| | X7-37 | ТС5-1-2 |Высокопотенциальный ввод канала 05 ТС группы 2| | X7-39 | ТС -0-2 |Общий низкопотенциальный ввод датчиков группы 2| | X7-41 | ТС6-1-2 |Высокопотенциальный ввод канала 06 ТС группы 2| | X7-43 | ТС7-1-2 |Высокопотенциальный ввод канала 07 ТС группы 2| | X7-45 | ТС -0-2 |Общий низкопотенциальный ввод датчиков группы 2| | X7-47 | ТС8-1-2 |Высокопотенциальный ввод канала 08 ТС группы 2| | X7-02 | ТС1-1-3 |Высокопотенциальный ввод канала 01 ТС группы 3| | X7-04 | ТС -0-3 |Общий низкопотенциальный ввод датчиков группы 3| | X7-06 | ТС2-1-3 |Высокопотенциальный ввод канала 02 ТС группы 3| | X7-08 | ТС3-1-3 |Высокопотенциальный ввод канала 03 ТС группы 3| | X7-10 | ТС -0-3 |Общий низкопотенциальный ввод датчиков группы 3| | X7-12 | ТС4-1-3 |Высокопотенциальный ввод канала 04 ТС группы 3| | X7-14 | ТС5-1-3 |Высокопотенциальный ввод канала 05 ТС группы 3| | X7-16 | ТС -0-3 |Общий низкопотенциальный ввод датчиков группы 3| | X7-18 | ТС6-1-3 |Высокопотенциальный ввод канала 06 ТС группы 3| | X7-20 | ТС7-1-3 |Высокопотенциальный ввод канала 07 ТС группы 3| | X7-22 | ТС -0-3 |Общий низкопотенциальный ввод датчиков группы 3| | X7-24 | ТС8-1-3 |Высокопотенциальный ввод канала 08 ТС группы 3| +-------------------------------------------------------------------+
Продолжение табл. 1-3
+-------------------------------------------------------------------+ |Колодка-|Усл.обозн.| Краткая характеристика цепи | |-контакт| цепи | | |--------+----------+-----------------------------------------------| | X7-26 | ТС1-1-4 |Высокопотенциальный ввод канала 01 ТС группы 4| | X7-28 | ТС -0-4 |Общий низкопотенциальный ввод датчиков группы 4| | X7-30 | ТС2-1-4 |Высокопотенциальный ввод канала 02 ТС группы 4| | X7-32 | ТС3-1-4 |Высокопотенциальный ввод канала 03 ТС группы 4| | X7-34 | ТС -0-4 |Общий низкопотенциальный ввод датчиков группы 4| | X7-36 | ТС4-1-4 |Высокопотенциальный ввод канала 04 ТС группы 4| | X7-38 | ТС5-1-4 |Высокопотенциальный ввод канала 05 ТС группы 4| | X7-40 | ТС -0-4 |Общий низкопотенциальный ввод датчиков группы 4| | X7-42 | ТС6-1-4 |Высокопотенциальный ввод канала 06 ТС группы 4| | X7-44 | ТС7-1-4 |Высокопотенциальный ввод канала 07 ТС группы 4| | X7-46 | ТС -0-4 |Общий низкопотенциальный ввод датчиков группы 4| | X7-48 | ТС8-1-4 |Высокопотенциальный ввод канала 08 ТС группы 4| | X8-01 | ТС1-1-1 |Высокопотенциальный ввод канала 01 ТС группы 5| | X8-03 | ТС -0-1 |Общий низкопотенциальный ввод датчиков группы 5| | X8-05 | ТС2-1-1 |Высокопотенциальный ввод канала 02 ТС группы 5| | X8-07 | ТС3-1-1 |Высокопотенциальный ввод канала 03 ТС группы 5| | X8-09 | ТС -0-1 |Общий низкопотенциальный ввод датчиков группы 5| | X8-11 | ТС4-1-1 |Высокопотенциальный ввод канала 04 ТС группы 5| | X8-13 | ТС5-1-1 |Высокопотенциальный ввод канала 05 ТС группы 5| | X8-15 | ТС -0-1 |Общий низкопотенциальный ввод датчиков группы 5| | X8-17 | ТС6-1-1 |Высокопотенциальный ввод канала 06 ТС группы 5| | X8-19 | ТС7-1-1 |Высокопотенциальный ввод канала 07 ТС группы 5| | X8-21 | ТС -0-1 |Общий низкопотенциальный ввод датчиков группы 5| | X8-23 | ТС8-1-1 |Высокопотенциальный ввод канала 08 ТС группы 5| | X8-25 | ТС1-1-2 |Высокопотенциальный ввод канала 01 ТС группы 6| | X8-27 | ТС -0-2 |Общий низкопотенциальный ввод датчиков группы 6| | X8-29 | ТС2-1-2 |Высокопотенциальный ввод канала 02 ТС группы 6| | X8-31 | ТС3-1-2 |Высокопотенциальный ввод канала 03 ТС группы 6| | X8-33 | ТС -0-2 |Общий низкопотенциальный ввод датчиков группы 6| | X8-35 | ТС4-1-2 |Высокопотенциальный ввод канала 04 ТС группы 6| | X8-37 | ТС5-1-2 |Высокопотенциальный ввод канала 05 ТС группы 6| | X8-39 | ТС -0-2 |Общий низкопотенциальный ввод датчиков группы 6| | X8-41 | ТС6-1-2 |Высокопотенциальный ввод канала 06 ТС группы 6| | X8-43 | ТС7-1-2 |Высокопотенциальный ввод канала 07 ТС группы 6| | X8-45 | ТС -0-2 |Общий низкопотенциальный ввод датчиков группы 6| | X8-47 | ТС8-1-2 |Высокопотенциальный ввод канала 08 ТС группы 6| +-------------------------------------------------------------------+
Продолжение табл. 1-3
+-------------------------------------------------------------------+ |Колодка-|Усл.обозн.| Краткая характеристика цепи | |-контакт| цепи | | |--------+----------+-----------------------------------------------| | X8-02 | ТС1-1-3 |Высокопотенциальный ввод канала 01 ТС группы 7| | X8-04 | ТС -0-3 |Общий низкопотенциальный ввод датчиков группы 7| | X8-06 | ТС2-1-3 |Высокопотенциальный ввод канала 02 ТС группы 7| | X8-08 | ТС3-1-3 |Высокопотенциальный ввод канала 03 ТС группы 7| | X8-10 | ТС -0-3 |Общий низкопотенциальный ввод датчиков группы 7| | X8-12 | ТС4-1-3 |Высокопотенциальный ввод канала 04 ТС группы 7| | X8-14 | ТС5-1-3 |Высокопотенциальный ввод канала 05 ТС группы 7| | X8-16 | ТС -0-3 |Общий низкопотенциальный ввод датчиков группы 7| | X8-18 | ТС6-1-3 |Высокопотенциальный ввод канала 06 ТС группы 7| | X8-20 | ТС7-1-3 |Высокопотенциальный ввод канала 07 ТС группы 7| | X8-22 | ТС -0-3 |Общий низкопотенциальный ввод датчиков группы 7| | X8-24 | ТС8-1-3 |Высокопотенциальный ввод канала 08 ТС группы 7| | X8-26 | ТС1-1-4 |Высокопотенциальный ввод канала 01 ТС группы 8| | X8-28 | ТС -0-4 |Общий низкопотенциальный ввод датчиков группы 8| | X8-30 | ТС2-1-4 |Высокопотенциальный ввод канала 02 ТС группы 8| | X8-32 | ТС3-1-4 |Высокопотенциальный ввод канала 03 ТС группы 8| | X8-34 | ТС -0-4 |Общий низкопотенциальный ввод датчиков группы 8| | X8-36 | ТС4-1-4 |Высокопотенциальный ввод канала 04 ТС группы 8| | X8-38 | ТС5-1-4 |Высокопотенциальный ввод канала 05 ТС группы 8| | X8-40 | ТС -0-4 |Общий низкопотенциальный ввод датчиков группы 8| | X8-42 | ТС6-1-4 |Высокопотенциальный ввод канала 06 ТС группы 8| | X8-44 | ТС7-1-4 |Высокопотенциальный ввод канала 07 ТС группы 8| | X8-46 | ТС -0-4 |Общий низкопотенциальный ввод датчиков группы 8| | X8-48 | ТС8-1-4 |Высокопотенциальный ввод канала 08 ТС группы 8| +-------------------------------------------------------------------+
Приложение 2 Таблица 2-1 Цепи внешних подключений БРП
+-------------------------------------------------------------------+ |Колодка-|Усл.обозн.| Краткая характеристика цепи | |-контакт| цепи | | |--------+----------+-----------------------------------------------| | | | Контакты реле включения объекта 1 (ТУВ1) | | | | ---------------------------------------- | | X3-01 | ТУВ1-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X3-02 | ТУВ1-Ц1 | Подвижный контакт 1-й контактной группы | | X3-03 | ТУВ1-НР2 | Неподвижный НР-контакт 2-й контактной группы | | X3-04 | ТУВ1-Ц2 | Подвижный контакт 2-й контактной группы | | X3-05 | ТУВ1-НР3 | Неподвижный НР-контакт 3-й контактной группы | | X3-06 | ТУВ1-Ц3 | Подвижный контакт 3-й контактной группы | | | | | | | | Контакты реле отключения объекта 1 (ТУО1) | | | | ----------------------------------------- | | X3-07 | ТУО1-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X3-08 | ТУО1-Ц1 | Подвижный контакт 1-й контактной группы | | X3-09 | ТУО1-НЗ2 | Неподвижный НЗ-контакт 2-й контактной группы | | X3-10 | ТУО1-Ц2 | Подвижный контакт 2-й контактной группы | | X3-11 | ТУО1-НР2 | Неподвижный НР-контакт 2-й контактной группы | | | | | | | | Контакты реле включения объекта 2 (ТУВ2) | | | | ----------------------------------------- | | X4-01 | ТУВ2-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X4-02 | ТУВ2-Ц1 | Подвижный контакт 1-й контактной группы | | X4-03 | ТУВ2-НР2 | Неподвижный НР-контакт 2-й контактной группы | | X4-04 | ТУВ2-Ц2 | Подвижный контакт 2-й контактной группы | | X4-05 | ТУВ2-НР3 | Неподвижный НР-контакт 3-й контактной группы | | X4-06 | ТУВ2-Ц3 | Подвижный контакт 3-й контактной группы | | | | | | | | Контакты реле отключения объекта 2 (ТУО2) | | | | ----------------------------------------- | | X4-07 | ТУО2-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X4-08 | ТУО2-Ц1 | Подвижный контакт 1-й контактной группы | | X4-09 | ТУО2-НЗ2 | Неподвижный НЗ-контакт 2-й контактной группы | | X4-10 | ТУО2-Ц2 | Подвижный контакт 2-й контактной группы | | X4-11 | ТУО2-НР2 | Неподвижный НР-контакт 2-й контактной группы | | | | | | | | Контакты реле включения объекта 3 (ТУВ3) | | | | ----------------------------------------- | | X5-01 | ТУВ3-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X5-02 | ТУВ3-Ц1 | Подвижный контакт 1-й контактной группы | | X5-03 | ТУВ3-НР2 | Неподвижный НР-контакт 2-й контактной группы | | X5-04 | ТУВ3-Ц2 | Подвижный контакт 2-й контактной группы | | X5-05 | ТУВ3-НР3 | Неподвижный НР-контакт 3-й контактной группы | | X5-06 | ТУВ3-Ц3 | Подвижный контакт 3-й контактной группы | +-------------------------------------------------------------------+
Продолжение табл. 2-1
+-------------------------------------------------------------------+ |Колодка-|Усл.обозн.| Краткая характеристика цепи | |-контакт| цепи | | |--------+----------+-----------------------------------------------| | | | | | | | Контакты реле отключения объекта 3 (ТУО3) | | | | ----------------------------------------- | | X5-07 | ТУО3-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X5-08 | ТУО3-Ц1 | Подвижный контакт 1-й контактной группы | | X5-09 | ТУО3-НЗ2 | Неподвижный НЗ-контакт 2-й контактной группы | | X5-10 | ТУО3-Ц2 | Подвижный контакт 2-й контактной группы | | X5-11 | ТУО3-НР2 | Неподвижный НР-контакт 2-й контактной группы | | | | | | | | Контакты реле включения объекта 4 (ТУВ4) | | | | ----------------------------------------- | | X6-01 | ТУВ4-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X6-02 | ТУВ4-Ц1 | Подвижный контакт 1-й контактной группы | | X6-03 | ТУВ4-НР2 | Неподвижный НР-контакт 2-й контактной группы | | X6-04 | ТУВ4-Ц2 | Подвижный контакт 2-й контактной группы | | X6-05 | ТУВ4-НР3 | Неподвижный НР-контакт 3-й контактной группы | | X6-06 | ТУВ4-Ц3 | Подвижный контакт 3-й контактной группы | | | | | | | | Контакты реле отключения объекта 4 (ТУО4) | | | | ----------------------------------------- | | X6-07 | ТУО4-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X6-08 | ТУО4-Ц1 | Подвижный контакт 1-й контактной группы | | X6-09 | ТУО4-НЗ2 | Неподвижный НЗ-контакт 2-й контактной группы | | X6-10 | ТУО4-Ц2 | Подвижный контакт 2-й контактной группы | | X6-11 | ТУО4-НР2 | Неподвижный НР-контакт 2-й контактной группы | | | | | | | | Контакты реле включения объекта 5 (ТУВ5) | | | | ----------------------------------------- | | X7-01 | ТУВ5-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X7-02 | ТУВ5-Ц1 | Подвижный контакт 1-й контактной группы | | X7-03 | ТУВ5-НР2 | Неподвижный НР-контакт 2-й контактной группы | | X7-04 | ТУВ5-Ц2 | Подвижный контакт 2-й контактной группы | | X7-05 | ТУВ5-НР3 | Неподвижный НР-контакт 3-й контактной группы | | X7-06 | ТУВ5-Ц3 | Подвижный контакт 3-й контактной группы | | | | | | | | Контакты реле отключения объекта 5 (ТУО5) | | | | ----------------------------------------- | | X7-07 | ТУО5-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X7-08 | ТУО5-Ц1 | Подвижный контакт 1-й контактной группы | | X7-09 | ТУО5-НЗ2 | Неподвижный НЗ-контакт 2-й контактной группы | | X7-10 | ТУО5-Ц2 | Подвижный контакт 2-й контактной группы | | X7-11 | ТУО5-НР2 | Неподвижный НР-контакт 2-й контактной группы | +-------------------------------------------------------------------+
Продолжение табл. 2-1
+-------------------------------------------------------------------+ |Колодка-|Усл.обозн.| Краткая характеристика цепи | |-контакт| цепи | | |--------+----------+-----------------------------------------------| | | | | | | | Контакты реле включения объекта 6 (ТУВ6) | | | | ----------------------------------------- | | X8-01 | ТУВ6-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X8-02 | ТУВ6-Ц1 | Подвижный контакт 1-й контактной группы | | X8-03 | ТУВ6-НР2 | Неподвижный НР-контакт 2-й контактной группы | | X8-04 | ТУВ6-Ц2 | Подвижный контакт 2-й контактной группы | | X8-05 | ТУВ6-НР3 | Неподвижный НР-контакт 3-й контактной группы | | X8-06 | ТУВ6-Ц3 | Подвижный контакт 3-й контактной группы | | | | | | | | Контакты реле отключения объекта 6 (ТУО6) | | | | ----------------------------------------- | | X8-07 | ТУО6-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X8-08 | ТУО6-Ц1 | Подвижный контакт 1-й контактной группы | | X8-09 | ТУО6-НЗ2 | Неподвижный НЗ-контакт 2-й контактной группы | | X8-10 | ТУО6-Ц2 | Подвижный контакт 2-й контактной группы | | X8-11 | ТУО6-НР2 | Неподвижный НР-контакт 2-й контактной группы | | | | | | | | Контакты реле включения объекта 7 (ТУВ7) | | | | ----------------------------------------- | | X9-01 | ТУВ7-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X9-02 | ТУВ7-Ц1 | Подвижный контакт 1-й контактной группы | | X9-03 | ТУВ7-НР2 | Неподвижный НР-контакт 2-й контактной группы | | X9-04 | ТУВ7-Ц2 | Подвижный контакт 2-й контактной группы | | X9-05 | ТУВ7-НР3 | Неподвижный НР-контакт 3-й контактной группы | | X9-06 | ТУВ7-Ц3 | Подвижный контакт 3-й контактной группы | | | | | | | | Контакты реле отключения объекта 7 (ТУО7) | | | | ----------------------------------------- | | X9-07 | ТУО7-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X9-08 | ТУО7-Ц1 | Подвижный контакт 1-й контактной группы | | X9-09 | ТУО7-НЗ2 | Неподвижный НЗ-контакт 2-й контактной группы | | X9-10 | ТУО7-Ц2 | Подвижный контакт 2-й контактной группы | | X9-11 | ТУО7-НР2 | Неподвижный НР-контакт 2-й контактной группы | | | | | | | | Контакты реле включения объекта 8 (ТУВ8) | | | | ----------------------------------------- | | X10-01 | ТУВ8-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X10-02 | ТУВ8-Ц1 | Подвижный контакт 1-й контактной группы | | X10-03 | ТУВ8-НР2 | Неподвижный НР-контакт 2-й контактной группы | | X10-04 | ТУВ8-Ц2 | Подвижный контакт 2-й контактной группы | | X10-05 | ТУВ8-НР3 | Неподвижный НР-контакт 3-й контактной группы | | X10-06 | ТУВ8-Ц3 | Подвижный контакт 3-й контактной группы | +-------------------------------------------------------------------+
Продолжение табл. 2-1
+-------------------------------------------------------------------+ |Колодка-|Усл.обозн.| Краткая характеристика цепи | |-контакт| цепи | | |--------+----------+-----------------------------------------------| | | | | | | | Контакты реле отключения объекта 8 (ТУО8) | | | | ----------------------------------------- | | X10-07 | ТУО8-НР1 | Неподвижный НР-контакт 1-й контактной группы | | X10-08 | ТУО8-Ц1 | Подвижный контакт 1-й контактной группы | | X10-09 | ТУО8-НЗ2 | Неподвижный НЗ-контакт 2-й контактной группы | | X10-10 | ТУО8-Ц2 | Подвижный контакт 2-й контактной группы | | X10-11 | ТУО8-НР2 | Неподвижный НР-контакт 2-й контактной группы | +-------------------------------------------------------------------+
6.1. Устройство и работа КУКП
6.1.1. КУКП используется в составе устройства в качестве контроллера ввода-вывода. КУКП обеспечивает аналого-цифровое преобразование сигналов ТИТ и управление модулями МВТС, МВТР, МВТР
или МВИС.
6.1.2. Габаритные размеры КУКП не превышают 300х255х260 мм3.
6.1.3. Масса КУКП не превышает 1 кг.
6.1.4. Питание КУКП осуществляется от блока питания КПМ напряжением 24(+3,3-4,4) В постоянного тока. Ток, потребляемый КУКП от блока питания не превышает 0,2 А.
6.1.5. Вид, диапазон входных аналоговых сигналов ТИТ и входное сопротивление каналов преобразования КУКП представлены в табл.6. Для специальных нужд, КУКП имеет возможность введения по каждому каналу индивидуально усиления с коэффициентами из ряда: 1, 2, 20 и 100.
Таблица 6 -------------------------------------------------------- Вид входного | Диапазон входных | Входное сигнала ТИТ | сигналов каналов ТИТ | сопротивление --------------|---------------------------|------------ Напряжение | минус 5 В -0- плюс 5 В |не менее 1 МОм постоянного | минус 10 В -0- плюс 10 В |не менее 1 МОм тока | | ------------------------------------------------------- Постоянный | минус 5 мА -0- плюс 5 мА| 1 кОм ток | минус 20 мА -0- плюс 20 мА| 250 Ом -------------------------------------------------------
6.1.6. Число разрядов преобразования - 12 двоичных разрядов со
знаком.
6.1.7. Предел допускаемого значения основной приведенной погрешности преобразования не более +-0,25 %.
6.1.8. Предел допускаемого значения дополнительной приведенной погрешности от изменения величины питающего напряжения, частоты, изменения температуры окружающей среды (на каждые 10 оС) не превышает половины предела допускаемой основной погрешности преобразования.
6.1.9. Максимальное число входов аналоговых сигналов (каналов ТИТ) -16.
6.1.10. Полное время преобразования 16-ти аналоговых сигналов не превышает 210 мс.
6.1.11. Схема структурная КУКП приведена на рис.26 и включает в себя следующие основные узлы: ВП- входной преобразователь сигналов ТИТ, обеспечивающий нормирование и фильтрацию переменной составляющей входных сигналов ТИТ;
МХ1- коммутатор каналов ТИТ;
МХ2- коммутатор эталонных сигналов;
К- усилитель программируемый;
АЦП- аналого-цифровой преобразователь;
узлы 1 и 2 гальванической развязки;
схема управления КУКП;
источник вторичного питания КУКП.
Каналы+--+ +---+ +---+ +----------+ +----+ +--------+ ТИТ |ВП| |MX1|-->---|MX2|->| K |->-|АЦП |->-| Гальва-| 1-----| |--| | | | | | | | . |ническая| . | |. | | Uэт1-| | |1,2,20,100| | | . |развязка| . | |. | | | | +----------+ | | . |(узел 1)| . | |. | | Uэт2-| | | | | . | | . | |. | | | | | | |->-| | 16----| |--| | +-| | | | | +--------+ +--+ +---+ ---+---+ | +----+ |...| | | | | | | +-^----------^-----------^---------^----+ | | | Гальваническая развязка (узел 2) | | |К модулям +---------------------------------------+ | | ввода- | | | | | | вывода | | | | | | и КТМС +-^----------^-----------^---------^-------V---V+ | |-----> | |. | Схема управления КУКП |. | |. | |-----> +-----------------------------------------------+ От БП КПМ+----------------+ Для внутренних =24В | Источник | нужд: +5В;+-15В;+5В -->--| питания |---> | | +----------------+
Рис. 26. Схема структурная КУКП
Схема электрическая принципиальная КУКП приведена на рис.2 и табл.2 приложения и включает:
1) АЦП (аналого-цифровой преобразователь) в составе:
нормирующие преобразователи с фильтрами (А1...А16);
коммутатор аналоговых сигналов (D1, D4); усилитель с программируемым коэффициентом усиления (D5, D7, R74...R77);
регистр управляющего слова РУС (D2,D3);
узел гальванической развязки (VE1...VE11, DR2...DR8, R63...R73, R78...R99);
прецизионный инвертор (D10, D14, R18, R21);
источник опорного и эталонных напряжений (D9, D13, VT1, VD1, R7...R9, R11...R13, R19, R20, R25, R26);
компаратор знака (D11);
генератор тактовой частоты (D6.2...D6.4);
схема формирования стартового импульса (D8.1, D8.2, D15);
схема преобразователя (D16...D19);
узел гальванической развязки выходных цепей АЦП (VE12...VE19, R97...R119, R34);
2) cхему управления КУКП в составе:
процессор (D20);
ОЗУ (D24);
ПЗУ (D25);
регистр адреса (D21);
схема интерфейса (D27);
схема логики (D22, D23, D26, D29);
схема дешифратора (D28);
cхема индикации наличия питающего напряжения и работы процессора (VT2, VD3, VD4);
3) источник вторичного питания КУКП А17.
6.1.12. Машинные коды рабочей программы функционирования КУКП размещены в ППЗУ при изготовлении устройства. Укрупненная блок-схема алгоритма функционирования КУКП представлена на рис. 27.
После включения питания производится тестирование ОЗУ, ПЗУ и начальная установка в выключенное состояние выходов ТУ и ТР. Далее процессор переходит на выполнение процедуры измерения сигналов ТИТ:
1) производится ввод и преобразование нулевых значений (напряжения смещения усилителей) при различных коэффициентах усиления (1, 2, 20 и 100) и регистрация полученных значений в соответствующих ячейках ОЗУ; 2) производится замер эталонных сигналов Vo, Vэт, формируемых источником опорного напряжения (ИОН) при различных коэффициентах усиления. От полученных значений алгебраически вычитаются значения смещения нулей и по полученной разнице вычисляются поправочные коэффициенты для каждого коэффициента усиления;
3) производится замер входных значений с датчиков ТИТ. От полученных значений алгебраически вычитается значения смещения нуля и результаты корректируются с учетом поправочного коэффициента и коэффициента усиления, соответствующего каждому из каналов. Измерения сигналов ТИТ по каждому из каналов производится дважды через мерный интервал длительностью 10 мс, полученные пары значений нормируются. Такая процедура практически устраняет влияние на входной сигнал напряжения помехи промышленной частоты 50 Гц. Результаты нормирования заносятся в буфер ОЗУ.
Следующим этапом выполняются операции ввода сигналов ТУ и ТР. Затем считываются состояния входов ТС и заносятся в буфер ТС, после чего выполняются операции ввода и преобразования аналоговых сигналов ТИТ.
После выполнения ввода ТИТ выполняется подпрограмма ОБМЕН ДАННЫМИ контроллеров КУКП и КТМС.
6.1.13. Тракт аналого-цифрового преобразования
Входные сигналы с датчиков ТИТ могут быть представлены в величинах согласно табл.6. На наборном поле нормирующих преобразователей сигналов ТИТ устанавливаются перемычки согласно табл.7.
Таблица 7 ----------------------------------------------------------------- Входной |Перемычки,устанавливаемые|Коэффициент сигнал |на колодке Х11 А1...А16 | усиления -------------------------|--------------------------------------- минус 10В - 0 - плюс 10В | нет | 1 | | минус 5мА - 0 - плюс 5мА | между 2 и 3 | 2 | | минус 20мА- 0 - плюс 20мА| между 1 и 2 | 2 | | -----------------------------------------------------------------
В состав нормирующих преобразователей (А1...А16) включены однозвенные ВЧ-фильтры (R46, C29) составляющих входного сигнала. Частота среза фильтра выбрана на уровне 159 Гц. +----------+
| НАЧАЛО |
+----------+
+----------+
| А=1 |
+----------+
+---------------+
|Тест ОЗУ, ПЗУ |
| ОЗУ, ПЗУ |
+---------------+
+-------------------+
|Начальная установка|
| выходов ТУ и ТРК |
+-------------------+
|--------------------+
+-----------------------+ |
| Ввод Uо, Uэт | |
| Вычисление масштабных | |
| коэффициентов | |
+-----------------------+ |
|----------------+ |
+-------------------+ | |
| Ввод сигналов ТС | | |
| и ТИТ | | |
+-------------------+ | |
+---------------------+ | |
|Выдача КТМС состояний| | |
| сигналов ТС и ТИТ | | |
+---------------------+ | |
+---------------------+ | |
|Прием от КТМС команды| | |
+---------------------+ | |
+---------------------+ | |
| Выполнение получен-| | |
| ной команды | | |
+---------------------+ | |
+----------+ | |
| А= А+1 | | |
+----------+ | |
| | |
нет | |
< А= 256?>-----------+ |
|
да| |
+----------+ |
| А= 0 | |
+----------+ |
+--------------------+
Рис. 27. Блок-схема алгоритма функционирования процессора КУКП
Сигналы с выхода нормирующих преобразователей, представленные напряжением, поступают на 16-ти канальный коммутатор D1, управляемый процессором. Выбранный коммутатором входной сигнал через усилитель с программируемым коэффициентом усиления D5, D7 и схему коммутатора D14, управляемого знаком входного сигнала, поступает на вход преобразователя D18. Преобразователь функционирует под управлением сигналов ЗАПУСК, УПРАВЛЕНИЕ МР (LB), УПРАВЛЕНИЕ СР (НВ).
Сигналом ЗАПИСЬ УПРАВЛЯЮЩЕГО СЛОВА (ЗУС) с D27:20 в регистр управляющего слова РУС (D2,D3) записывается код управляющего слова (рис. 28).
+---------------------------------------+ | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | +---------------------------------------+ +-------------------+ | | +---------------------------+ |Значение| | | | | |N канала| | Кус | | | | |------------------+--------| |--------+----------| | | | 0 0 0 0 | 1 | | 1 | 0 0 | | | | 0 0 0 1 | 2 | | 2 | 0 1 | | | | 0 0 1 0 | 3 | | 20 | 1 0 | | | | 0 0 1 1 | 4 | | 100 | 1 1 | | | | 0 1 0 0 | 5 | +-------------------+ | | | 0 1 0 1 | 6 | +----------------+ | 0 1 1 0 | 7 | | Канал | | | 0 1 1 1 | 8 | |--------+-------| | 1 0 0 0 | 9 | | Uо | 0 0 | | 1 0 0 1 | 10 | | Uх | 0 1 | | 1 0 1 0 | 11 | | Uэт1 | 1 0 | | 1 0 1 1 | 12 | | Uэт2 | 1 1 | | 1 1 0 0 | 13 | +----------------+ | 1 1 0 1 | 14 | | 1 1 1 0 | 15 | | 1 1 1 1 | 16 | +---------------------------+
Рис. 28. Структура управляющего слова
Значения коэффициентов усиления для каждого канала заносятся в ПЗУ с помощью сервисного оборудования при выпуске КУКП на предприятии-изготовителе.
Одновременно с выдачей сигнала ЗУС на входы LB и НВ D18 с D27/19 подается сигнал, разрешающий вывод с преобразователя (D18) старших разрядов данных. На вход Т D18 подается тактовая частота порядка 25 кГц с генератора (D6.2, D6.3, D6.4, D15.1).
Входной сигнал через коммутаторы D1 и D4 подается на масштабный усилитель, коэффициент усиления которого определяется разрядами D6 и D7 регистра управляющего слова.
С выхода масштабного усилителя сигнал поступает на вход инвертирующего усилителя D10, вход Х4 коммутатора D14, а также на вход компаратора знака D11.
Компаратор знака управляет коммутатором D14, который совместно с инвертирующим усилителем D10 представляет выпрямитель входного сигнала. Таким образом на вход повторителя D16 всегда поступает сигнал одного знака, что дает возможность увеличить разрешающую способность АЦП. Микросхема D18 совместно с D17 и компаратором D12 представляют собой завершенную схему АЦП.
При поступлении сигнала ЗАПУСК на вход S D18 и наличии тактовых импульсов на входе Т начинается аналого-цифровое преобразование методом последовательного приближения.
После выдачи сигнала ЗАПУСК схема управления контроллера считывает байт данных с АЦП в формате, приведенном на рис.29 и анализирует значение разряда D5.
+---------------------------------------+
| D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
+---------------------------------------+
| | | | +---------------------------------------+
| | | | | 12 11 10 9 |Старшие разряды АЦП|
| | | | +---------------------------------------+
| | | | Знаковый разряд АЦП
| | | +--------------------
| | | Конец преобразования АЦП
| | +-----------------------------
х х Коэффициент усиления
+------------------------------------ Рис.29. Формат старшего байта данных преобразователя
При D5=1 процессор фиксирует байт в буфере ОЗУ и считывает младшие разряды АЦП. Подобным образом производится преобразование сигналов ТИТ по всем 16-ти каналам. Через мерный интервал длительностью 10 мс производится повторное преобразование входных
сигналов по всем каналам.
6.1.14. Работа КУКП в режиме ввода-вывода дискретных сигналов
Модули ввода-вывода дискретных сигналов МВТС, МВТР и МВТУ управляются сигналами ВЫБОР МОДУЛЯ (ВМ), ЧТЕНИЕ (ЧТ), ЗАПИСЬ (ЗП), ВЫБОР БАЙТА, ДАННЫЕ.
В режиме ввода-вывода дискретных сигналов КУКП выставляет на интерфейсных линиях внутренней магистрали коды управления в формате, приведенном на рис.30.
+---------------------------------------+ | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 | +---------------------------------------+ +-----------------------------+ | | +----------------+ |не используется| 0 0 0 | | | | 0 - 1-й байт | |выбор модуля 1 | 0 0 1 | | | | 1 - 2-й байт | |выбор модуля 2 | 0 1 0 | | | +----------------+ |выбор модуля 3 | 0 1 1 | | | --+ +-- |выбор модуля 4 | 1 0 0 | | | Запись - +---+ |не используется| 1 0 1 | | +------------------ |разрешение АЦП | 1 1 0 | | --+ +-- |РШКТМС | 1 1 1 | | Чтение - +---+ +-----------------------------+ +-------------------------
Рис.30. Формат кодов управления Разрядами D5, D6 и D7 выбираются внешние по отношению к процессору КУКП устройства (модули), с которыми он обменивается данными. Значение разряда D1 определяет номер активного байта. Сигналом ЗАПИСЬ=1 производится запись данных, установленных на выходе порта А микросхемы D27. Сигнал ЧТЕНИЕ=1 используется для считывания на входе порта А микросхемы D27 значений контролируемых сигналов с
модулей.
6.1.15. Работа КУКП в режиме обмена с КТМС
После завершения операций вывода команд ТУ, ТРК, ввода ТС и ТИТ процессор КУКП приступает к передаче кадра данных процессору КТМС. Диаграмма обмена представлена на рис. 31. Первоначально процессор КУКП анализирует состояние сигнала на линии С5 D27. При С5=0 процессор КУКП выставляет на выходе порта А D27 первый байт данных. Строб данных через некоторый промежуток, необходимый для устранения перекоса данных на приеме, формируется состоянием линии КТМС=1 - совокупность РШКТМС=1 (см. рис.28) и В3=1 D27. В ответ на строб данных процессор КТМС (принимает строб на линии РШ КТМС (С6 D8)) считывает данные по линиям порта В D8 и выставляет сигнал подтверждения приема данных на линии ОТВЕТ ( А6 D8 ). Процессор КУКП приняв состояние С5=1 D27 снимает данные с порта А и возвращает линию строба передаваемых данных в состояние низкого уровня (КТМС=0). Получив на входе РШ КТМС низкий уровень сигнала строба данных процессор КТМС возвращает уровень на линии ОТВЕТ в состояние низкого уровня (ОТВЕТ=0). Процесс передачи байта данных из КУКП в КТМС завершен. Последующие байты информационного кадра передаются аналогично. В режиме обмена информацией процессоры КУКП и КТМС поддерживают согласно алгоритма дисциплину обмена на уровне соглашения: принята посылка - передан ответ.
КТМС __ __________ _ _ ___________ __ КУКП ---- \ / \ / \ / \ / ----- ДАННЫЕ X КТМС< KУКП X X КТМС >KУКП X ДАННЫЕ Порт В __/_\__________/_\_ _/_\___________/_\__t Порт А РШ КТМС- +-------+ +---------+ КТМС=РШKTMC^ C6-вход ______|_______|_____________|_________|_t ^B3-выход ОТВЕТ- +-------+ +------+ А6-выход_________|_______|_________|______|_____t C5-вход
Рис.31. Диаграмма обмена между КТМС и КУКП
Обратная передача данных из КТМС в КУКП производится следующим порядком. При готовности передачи байта данных в КУКП процессор КТМС анализирует состояние сигнала на линии РШ КТМС. При РШ КТМС=0 процессор КТМС выставляет на выходе порта В D8 первый байт данных. Строб данных через некоторый промежуток, необходимый для устранения перекоса данных на приеме, формируется наличием сигнала ОТВЕТ=1. В ответ на строб данных процессор КУКП (принимает строб данных на линии С5 D27) считывает данные по линиям порта А D27 и выставляет сигнал подтверждения приема данных на линии КТМС (при совокупности РШКТМС=1 (см. рис.28) и В3=1 D27). Процессор КТМС приняв подтверждение приема - РШ КТМС=1 снимает данные с порта В и возвращает линию строба передаваемых данных в состояние низкого уровня (ОТВЕТ=0). Получив на входе С5 D27 низкий уровень сигнала строба данных процессор КУКП возвращает уровень на линии КТМС в состояние низкого уровня (КТМС=0). Процесс передачи байта данных из КТМС в КУКП завершен. Последующие байты информационного кадра передаются аналогично.
После завершения цикла обмена с КТМС процессор КУКП переходит на выполнение своего внутреннего цикла по обслуживанию ТУ, ТРК (или ТИИ), ТС и ТИТ.
6.2.1. Модуль МВТС предназначен для ввода дискретных сигналов, выдаваемых датчиками ТС. Модуль является пассивным элементом и работает под управлением КУКП. Структурная схема МВТC представлена на рис.32. МВТC состоит из следующих основных частей:
схема управления модулем (СУ) предназначена для гальванической развязки цепей модуля и устройства и обеспечения функционирования основных узлов модуля;
переключатель (П), расположенный на лицевой панели модуля, предназначен для выбора числа обслуживаемых модулем (устройством) групп;
источник питания (ИП) предназначен для питания функциональной части МВТC и датчиков ТС;
буферный регистр (БР) предназначен для фиксации позиционного кода выбора группы ТС;
блоки ключей (БК1 и БК2) предназначены для обеспечения токовой нагрузки модуля.
К КУКП +-----+ +-----+ +----------+ <---------->| СУ | | БР | | |--->Гр1 ТC . | |<-->| |<-->| БК1 |--->Гр2 ТC . | | | | | |--->Гр3 ТC . | | | | | |--->Гр4 ТC <---------->| | | | | |--->Гр5 ТC | | | | | |--->Гр6 ТC +------+ | | | | | |--->Гр7 ТC | П | | | | | | |--->Гр8 ТC | |--->| | | | +----------+ | | | | | | +----------+ | | | | | |<-->| |<---ТC1 +------+ +-----+ +-----+ | БК2 |<---ТC2 От БП КПМ +------+ | |<---ТC3 =24В | ИП |На внутренние | |<---ТC4 -------->| |нужды МВТC: | |<---ТC5 | |+5В,+-15В | |<---ТC6 | |--------> | |<---ТC7 | | | |<---ТC8 | | +----------+ +------+
Рис. 32. Схема структурная модуля МВТС 6.2.2. Входными неинтерфейсными сигналами МВТС являются сигналы с выхода датчиков ТС контактного или бесконтактного типа. Параметры
сигналов с датчиков ТС приведены в п.4.2.
6.2.3. Входными и выходными интерфейсными сигналами модуля МВТС являются сигналы обмена модуля с КУКП:
D0...D7 - сигналы данных;
ЗП - сигнал строба записи данных;
ЧТ - сигнал строба чтения данных;
1/2Б - сигнал выбора номера байта.
Уровни сигналов данной группы соответствуют: высокий уровень - от 3,5 до 5,5 В; низкий уровень - от 0 до 0,8 В.
6.2.4. При обращении к МВТС процессор КУКП выставляет на шину ДАННЫХ позиционный код номера группы ТС и устанавливает состояния сигналов "ВМ"=0 и "1/2Б"=0, после чего выдается сигнал "ЗАП"=1.
Сигналы с шины ДАННЫХ после гальванической развязки СУ (D1, VE1...VE12) поступают на вход буферного регистра (Е1...Е4) и записываются в него сигналом ЗАП.
Активным сигналом выбора группы ТС является низкое напряжение (менее 1 В) на соответствующем выходе БК1. После задания группы ТС процессор КУКП устанавливает сигнал 1/2Б в состояние логической единицы и считывает второй байт МВТС: сигналом чтения ("ЧТ"=1) процессор КУКП инициирует вывод модулем МВТС на шину данных байта состояний сигналов выбранной группы из БК2. Диаграмма сигналов обмена процессора КУКП с модулем МВТС представлена на рис.33.
--------+ +-- ВМ1 ________|__________________________________________________|_t +---------------+ +----------- 1/2Б____________________|_______________|_____________|__________t _____ ______ ____ ____ _ _ _ ______ ____ ____ _ \ / \ / \ / \ / \ / \ / \ / \ / D0...D7 Х N ГрТС Х Х ТС Х Х N ГрТС Х Х ТС Х _____/_\______/_\____/_\____/_\_____/_\______/_\____/_\____/_\t --------+ +---------------------------+ +------------------ ЗП ________|__|___________________________|___|_________________t ---------------------+ +---------------------------+ +---- ЧТ _____________________|___|___________________________|___|___t
Рис.33. Диаграмма сигналов обмена процессора КУКП с модулем МВТС
Таким образом, задавая номер группы ТС от 1 до n, процессор КУКП производит ввод состояний сигналов ТС всех групп. Количество групп ТС n (nmax=8), обслуживаемых устройством, задается с помощью переключателя, расположенного на лицевой панели модуля МВТС. Установленное на переключателе двоичным кодом количество групп ТС отображается единичными индикаторами, расположенными на лицевой панели модуля и обозначенными цифрами "1" (i=1), "2" (i=2) и "4" (i=3). Число выбранных групп определяется выражением:
N = 1+а1*1+а2*2+а3*4,
где аi = 0 при отсуствии свечения индикатора i;
аi = 1 при наличии свечения индикатора i.
Состояние выходных ключей выбора группы ТС контролируются при работе модуля.
6.2.5. Габаритные размеры модуля МВТС не превышают 30х255х260 мм3. Масса модуля МВТС не превышает 0,8 кг.
6.2.6. Питание модуля МВТС обеспечивается от блока питания КПМ (БП КПМ) постоянным током напряжением (24+3,6-4,8) В. Ток, потребляемый модулем от блока питания, не превышает 0,2 А. Получаемаемое от БП КПМ напряжение ИП преобразовывает в ряд напряжений для собственных нужд:
а) стабилизированное напряжение 5 В для питания функциональной части модуля (основной канал источника);
б) стабилизированное напряжение 5 В (параметрический стабилизатор) для питания гальванически изолированных интерфейсных цепей модуля.
6.2.7. Схема электрическая принципиальная модуля МВТС приведена на рис.3 и табл.3 приложения и содержит:
схему гальванической развязки входных интерфейсных сигналов (D1, VE1...VE12) и схему гальванической развязки выходных интерфейсных сигналов (D3...D10, VE13...VE20);
схему формирования сигналов записи и чтения состояний буферного регистра (D1, D2);
схему 16-ти разрядного буферного регистра (Е1...Е8);
фильтрующие цепочки (C1, R5...C16, R20);
источник питания (Е9);
схему задания и индикации числа групп ТС (S1, R31, R32, VD4, R33).
6.3. Устройство и работа модуля МВТР
6.3.1. Модуль МВТР предназначен для выдачи сигналов ТРК. Модуль является пассивным элементом и работает под управлением КУКП. Структурная схема МВТР представлена на рис. 34. Модуль МВТР состоит
из следующих основных частей:
схема управления модулем (СУ) предназначена для гальванической развязки цепей модуля и устройства и обеспечения функционирования основных узлов модуля; источник питания (ИП) предназначен для питания функциональной части МВТР;
буферный регистр (БР) предназначен для фиксации кода ТР;
блок ключей (БК) предназначен для обеспечения токовой нагрузки модуля.
К КУКП +-----+ +-----+ +----------+Разряды ТРК <---------->| СУ | | БР | | |--->1 . | |<-->| |<-->| БК |. . | | | | | |. . | | | | | |. <---------->| | | | | |--->16 | | | | +----------+ +-----+ +-----+ От БП КПМ +------+ =24В | ИП |На внутренние -------->| |нужды МВТР: | |+5В,+5В | |--------> | | +------+
Рис. 34. Схема структурная модуля МВТР
6.3.2. Выходными неинтерфейсными сигналами модуля МВТР являются сигналы ТРК, представленные на каждом из 16-ти выводов:
а) напряжением высокого уровня от 3,5 до 5,5 В при отсуствии внешнего источника или свыше 24 В при наличии внешнего источника постоянного тока напряжением не более 30 В;
в) напряжением низкого уровня не превышающем 1 В при токе нагрузки до 0,1 А.
6.3.3. Входными и выходными интерфейсными сигналами модуля МВТР являются сигналы обмена модуля с КУКП:
D0...D7 - сигналы данных;
ЗП - сигнал строба записи данных;
ЧТ - сигнал строба чтения данных;
1/2Б - сигнал выбора номера байта.
Уровни сигналов данной группы соответствуют: высокий уровень - от 3,5 до 5,5 В; низкий уровень - от 0 до 0,8 В.
6.3.4. Выдача сигналов ТРК модулем МВТР производится аналогично заданию номера группы ТС с той разницей, что данные (код ТРК) записываются двумя байтами в 16-ти разрядный буферный регистр модуля. В процессе работы модуля производится контроль состояния выходных ключей ТРК. Временная диаграмма сигналов обмена КУКП с модулем МВТР представлена на рис.35. --------+ +- - - -+ +- - - -+ ВМ2 ________|_____________|_______|________________|_______|_____t +----------+ +----------+ 1/2Б___________|__________|_____________|__________|_____________t _____ _____ _____ _ _ _ _____ _____ _ _ _ _____ \ / \ / \ / \ / \ / \ / \ / D0...D7 Х 1БАЙТ Х 2БАЙТ Х Х 1БАЙТ Х 2БАЙТ Х Х 1БАЙТ _____/_\_____/_\_____/_\______/_\_____/_\_____/_\______/_\____t --------+ +----+ +---- - - -------------------- - - -------- ЗП ________|__|____|__|_________________________________________t ------------------------ - - --+ +---+ +----- - - -+ +-- ЧТ _______________________________|___|___|___|___________|___|_t
Рис. 35. Временная диаграмма сигналов обмена КУКП с модулем МВТР
6.3.5. Габаритные размеры модуля МВТР не превышают 30х255х260 мм. Масса модуля МВТР не превышает 0,8 кг.
6.3.6. Питание модуля МВТР обеспечивается от блока питания КПМ (БП КПМ) постоянным током напряжением (24+3,6-4,8) В. Ток, потребляемый модулем от блока питания, не превышает 0,2 А. Получаемаемое от БП КПМ напряжение ИП преобразовывает в ряд напряжений для собственных нужд:
а) стабилизированное напряжение 5 В для питания функциональной части модуля (основной канал источника);
б) стабилизированное напряжение 5 В (параметрический стабилизатор) для питания гальванически изолированных интерфейсных цепей модуля.
6.3.7. Схема электрическая принципиальная модуля МВТР приведена на рис.4 и табл.4 приложения и содержит:
схему гальванической развязки входных интерфейсных сигналов (D1, VE1...VE12) и схему гальванической развязки выходных интерфейсных сигналов (D3...D10, VE13...VE20);
схему формирования сигналов записи и чтения состояний буферного регистра (D1, D2);
схему 16-ти разрядного буферного регистра (Е1...Е8);
фильтрующие цепочки (C1, R5...C16, R20);
источник питания (Е9);
схему задания и индикации числа групп ТС (S1, R31, R32, VD4, R33).
6.4. Устройство и работа модуля МВТУ
6.4.1. Модуль МВТУ предназначен для выдачи сигналов ТУ. Модуль является пассивным элементом и работает под управлением КУКП. Структурная схема МВТУ представлена на рис. 36. Модуль МВТУ состоит из следующих основных частей: схема управления модулем (СУ) предназначена для гальванической развязки цепей модуля и устройства и обеспечения функционирования
основных узлов модуля;
источник питания (ИП) предназначен для питания функциональной части МВТУ и реле блока реле-повторителей БРП;
буферный регистр (БР) предназначен для фиксации позиционных кодов включения ключей выбора группы и номера ТУ;
блоки ключей (БК1 и БК2) предназначены для обеспечения токовой нагрузки модуля.
Для повышения надежности телеуправления коммутация тока обмотки каждого реле блока БРП со стороны УКПМ-2 производится двухсторонняя: выбором характера операции (ВКЛЮЧИТЬ/ОТКЛЮЧИТЬ), группы реле и выбором объекта в группе. Исполнительные реле располагаются матрицей 8х8. Электронные ключи выбора группы и характера операции коммутируют положительный полюс цепи питания обмоток реле, а ключи выбора объекта - отрицательный полюс. Электронные ключи снабжены цепями контроля состояния. Алгоритм исполнения УКПМ-2 команды ТУ следующий:
1) проверяется исходное состояние ключей перед включением, они должны быть в отключенном положении;
2) выдается команда включения ключа выбора группы и характера операции;
3) контролируется включенное состояние ключа выбора группы, характера операции и отключенное состояние всех остальных ключей;
4) выдается команда отключения ключа выбора группы и характера операции;
5) контролируется отключенное состояние всех ключей;
6) выдается команда включения ключа выбора объекта в группе;
7) контролируется включенное состояние ключа выбора объекта в группе и отключенное состояние всех остальных ключей;
8) выдается команда отключения ключа выбора объекта;
9) контролируется отключенное состояние всех ключей;
10) выдается команда включения ключа выбора группы, характера операции и ключа выбора объекта;
11) контролируется включенное состояние ключа выбора группы, характера операции и ключа выбора объекта в группе, а также отключенное состояние всех остальных ключей;
12) выдается квитанция в сторону УПУ об исполнении команды ТУ;
13) выдерживается задержка включенного состояния реле в течение 1...2 с; 14) выдается команда отключения ключа выбора группы и характера операции и ключа выбора объекта;
15) контролируется отключенное состояние всех ключей.
При несоответствии состояния ключей по п.п. 1), 3), 5), 7) и 9) реле не включается и квитанция УПУ не выдается. При несоответствии состояния ключей по п.п. 11) реле не включается и квитанция УПУ не выдается.
К КУКП +-----+ +-----+ +----------+ <---------->| СУ | | БР | | |--->Гр1 ТУ . | |<-->| |<-->| БК1 |--->Гр2 ТУ . | | | | | |--->Гр3 ТУ . | | | | | |--->Гр4 ТУ <---------->| | | | | |--->ТУВ | | | | | |--->ТУО | | | | +----------+ | | | | +----------+ | | | |<-->| |--->ТУ1 +-----+ +-----+ | БК2 |--->ТУ2 От БП КПМ +------+ | |--->ТУ3 =24В | ИП |На внутренние | |--->ТУ4 -------->| |нужды МВТУ: | |--->ТУ5 | |+5В,+-15В | |--->ТУ6 | |--------> | |--->ТУ7 | |На БРП | |--->ТУ8 | | =24В +----------+ | |--------> +------+
Рис. 36. Схема структурная модуля МВТУ
6.4.2. Выходными неинтерфейсными сигналами модуля МВТУ являются:
а) сигналы позиционного кода номера группы ТУ с уровнями:
высокий уровень (активное состояние) - от 20 до 24 В при токе нагрузки до 0,1 А;
низкий уровень (пассивное состояние) - не более 1 В.
б) сигналы позиционного кода номера ТУ в группе с уровнями:
низкий уровень (активное состояние)- не более 1 В при токе нагрузки до 0,1 А;
высокий уровень (пассивное состояние) - до 24 В.
6.4.3. Входными и выходными интерфейсными сигналами модуля МВТС являются сигналы обмена модуля с КУКП:
D0...D7 - сигналы данных;
ЗП - сигнал строба записи данных; ЧТ - сигнал строба чтения данных;
1/2Б - сигнал выбора номера байта.
Уровни сигналов данной группы соответствуют: высокий уровень - от 3,5 до 5,5 В; низкий уровень - от 0 до 0,8 В.
6.4.4. Работа модуля МВТУ аналогична работе МВТР. Первым байтом в буферный регистр МВТУ записывается позиционный код номера группы ТУ, а вторым байтом записывается позиционный код номера ТУ в группе. Диаграмма сигналов обмена контроллера КУКП с модулем МВТУ приведена на рис.37.
---------+ +- - - -+ +- - - -+ ВМ3 ________|_____________|_______|________________|_______|_____t +-------+ +-------+ 1/2Б____________|_______|________________|_______|_______________t _____ _____ _____ _ _ _ _____ _____ _ _ _ _____ \ / \ / \ / \ / \ / \ / \ / D0...D7 Х NГрТУ Х N ТУ Х Х NГрТУ Х N ТУ Х Х NГрТУ _____/_\_____/_\_____/_\______/_\_____/_\_____/_\______/_\____t --------+ +----+ +---- - - -------------------- - - -------- ЗП ________|__|____|__|_________________________________________t ------------------------ - - + +-+ +----- - - + +-- ЧТ _____________________________|_____|_|_____|__________|____|_t
Рис. 37. Диаграмма сигналов обмена контроллера КУКП с модулем МВТУ
Защита цепей управления от несанкционированного включения при выходе из строя выходного полупроводникового ключа обеспечивается за счет того, что каждое реле блока реле-повторителей питается током двух ключей (выбор группы и элемента в группе) - монтажное И. Выход токовых ключей контролируется модулем и, в случае несоответствия кода на выходе ключей коду управления, соответствующий ключ отключается и КУКП информируется.
6.4.5. Габаритные размеры модуля МВТУ не превышают 30х255х260 мм. Масса модуля МВТУ не превышает 0,8 кг.
6.4.6. Питание модуля МВТУ обеспечивается от блока питания КПМ (БП КПМ) постоянным током напряжением (24+3,6-4,8) В. Ток, потребляемый модулем от блока питания, не превышает 0,3 А. Получаемаемое от БП КПМ напряжение ИП преобразовывает в ряд напряжений для собственных нужд:
а) стабилизированное напряжение 5 В для питания функциональной части модуля (основной канал источника);
б) стабилизированное напряжение 5 В (параметрический стабилизатор) для питания гальванически изолированных интерфейсных цепей модуля;
в) нестабилизированное напряжение 24+-4,8 В для питания нагрузки модуля (реле блока реле-повторителей).
6.4.7. Схема электрическая принципиальная модуля МВТУ приведена на рис.5 и табл.5 приложения и содержит: схему гальванической развязки входных интерфейсных сигналов (D1, VE1...VE12) и схему гальванической развязки выходных интерфейсных сигналов (D3...D10, VE13...VE20);
схему формирования сигналов записи и чтения состояний буферного регистра (D1, D2);
схему 16-ти разрядного буферного регистра (Е1...Е8);
фильтрующие цепочки (C1, R5...C16, R20);
источник питания (Е9).
6.5. Устройство и работа модуля МВИС
6.5.1. Модуль МВИС предназначен для ввода импульсных сигналов ТИИ. Модуль является пассивным элементом и работает под управлением КУКП. Структурная схема модуля МВИС приведена на рис.38. МВИС состоит
из следующих основных узлов:
входной преобразователь (ВП) предназначен для нормирования входных сигналов, фильтрации высокочастотных составляющих сигналов и гальванического разделения цепей датчиков и схемы модуля;
счетчики импульсов (Сч1...Сч8) предназначены для подсчета импульсов, поступающих по 8-ми входным каналам;
мультиплексор (МХ) предназначен для вывода на линии данных информационных разрядов одного из восьми счетчиков по командам КУКП;
схема управления сбросом счетчиков (СУС) предназначена для сброса выбранного счетчика по команде КУКП;
схема управления модулем (СУ) предназначена для гальванической развязки цепей модуля и устройства и обеспечения функционирования основных узлов модуля;
генератор (Г) предназначен для нормирования минимальной длительности входных сигналов;
источник питания (ИП) предназначен для питания гальванически развязанных цепей датчиков и функциональной части МВИС.
Каналы ТИИ +-----+ +-----+ +-----+ +------+ К КУКП 1---->| ВП |--->| Сч1 |-->| МХ |------>| СУ |<-------> >| | +->|R | >| | | | . >| | | +-----+ >| | | | . >| | | . >| | | | . >| | | . >| |<------| |<-------> >| | | . >| | | | >| | | +-----+ >| | | | 8---->| |-+->| Сч8 |-->| | +---| | +-----+ |+>|R | +-----+ | +------+ | | || +-----+ | К узлам МВИС+-------+ +----+ | | || +-----+ | +5В | | =24В | | | | |+-| СУС |<------------+ <---------| ИП |<----- | Г |>-+ | | -| | | | | | | +--| | +5В | | +----+ | +-----+ +---<--| | +---------------------------------+ +-------+
Рис 38. Схема структурная модуля МВИС
6.5.2. Входными неинтерфейсными сигналами модуля МВИС являются сигналы с параметрами, приведенными в п.3.8.
6.5.3. Входными и выходными интерфейсными сигналами модуля МВТС являются сигналы обмена модуля с КУКП:
D0...D7 - сигналы данных;
ЗП - сигнал строба записи данных;
ЧТ - сигнал строба чтения данных;
1/2Б - сигнал выбора номера байта.
Уровни сигналов данной группы соответствуют: высокий уровень - от 3,5 до 5,5 В; низкий уровень - от 0 до 0,8 В.
6.4.4. Импульсы с датчиков ТИИ поступают на входной преобразователь. Во входном преобразователе ВП импульсы через схему гальванической развязки (VE1...VE12) подаются на вход схемы формирования счетного импульса (D-вход триггера D12:5). На счетный вход триггера D12.2 подаются импульсы нормированной длительностью от внутреннего генератора Г. С выхода ВП (D12.2) импульсы с нормированной длительностью подаются на вход канального счетчика (D10:2).
При обращении к МВИС процессор КУКП устанавливает на шине ДАННЫХ код номера канала ТИИ и сигналы ВМ4=0, 1/2Б=0 и через необходимый промежуток сигнал ЗАПИСЬ=0. Последующим считыванием по сигналу ЧТЕНИЕ=0 процессор КУКП инициирует ввод двух байтов кода - значения счетчика выбранного канала. При обработке телемеханической функции передачи в УПУ группы значений ТИИ с последующим сбросом счетчиков, эта операция производится по выбранному счетчику отдельно сигналом СБРОС=0. Диаграмма сигналов обмена контроллера КУКП с модулем МВИС, представлена на рис. 39.
-------+ +-- ВМ4 _______|__________________________________________________|_t +---------+ +---------+ 1/2Б___________________|_________|_______________|_________|____t ___ ______ _____ _____ _____ ______ ______ ____ \ / \ / \ / \ / \ / \ / \ / D0..D7 Х N ТИИ Х 1БАЙТ Х 2БАЙТ Х N ТИИ Х 1 БАЙТ Х 2 БАЙТ Х ___/_\______/_\_____/_\_____/_\_____/_\______/_\______/_\___t -------+ +--------------------+ +------------------------- ЗП _______|__|____________________|___|________________________t --------------+ +---+ +-----------+ +----+ +-------- ЧТ ______________|___|___|___|___________|____|____|___|_______t -------------------------------------------------------+ +-- СБРОС______________________________________________________|__|_t
Рис. 39. Диаграмма сигналов обмена контроллера КУКП с модулем МВИС
6.5.5. Габаритные размеры модуля МВИС не превышают 30х255х260 мм. Масса модуля МВИС не превышает 0,8 кг.
6.5.6. Питание модуля МВИС обеспечивается от блока питания КПМ (БП КПМ) постоянным током напряжением (24+3,6-4,8) В. Ток, потребляемый модулем от блока питания, не превышает 0,2 А. Получаемаемое от БП КПМ напряжение ИП преобразовывает в ряд напряжений для собственных нужд:
а) стабилизированное напряжение 5 В для питания функциональной части модуля (основной канал источника);
б) стабилизированное напряжение 5 В (параметрический стабилизатор) для питания гальванически изолированных цепей датчиков ТИИ.
6.5.7. Схема модуля МВИС (рис.6 и табл.6 приложения) содержит:
схему формирования входных сигналов (R1...R8, C1...C8);
схему гальванической развязки (VE1...VE8);
схему генератора импульсов (С9, R9, D1);
схему формирования сигналов ЧТЕНИЕ и СБРОС (D2...D9).
Модуль содержит 8 однотипных каналов счета импульсов, каждый из которых содержит:
схему формирования счетного импульса (D12, D13);
схему 16-ти разрядного счетчика (D10, D11);
шинные формирователи (D14, D15).
6.6. Устройство и работа КТМС
6.6.1. КТМС предназначен для последовательного обмена информацией между УКПМ и УПУ по каналам ТЧ. Характеристики каналов приведены в п.3.2. КТМС конструктивно выполнен в виде закрытого модуля с
габаритными размерами не более 30х255х260 мм3.
Масса КТМС не превышает 1 кг.
6.6.2. Питание КТМС осуществляется от блока питания КПМ напряжением 24(+3,6-4,8) В постоянного тока. Мощность, потребляемая КТМС от блока питания, не превышает 4,2 Вт.
6.6.3. Характеристические частоты приема-передачи информации по каналам ТЧ и их соответствие состояниям "нуля" и "единицы" устанавливаются на предприятии-изготовителе при выпуске установкой/снятием перемычек на монтажных колодках. Значения частот можно устанавливать любыми из ряда по табл.8. Допустимые отклонения установленных значений частот не превышают +-1 Гц.
Таблица 8 ----------------------------------------------------------------- Частота, Гц | Частота, Гц | Частота, Гц | Частота, Гц ----------------------------------------------------------------- 1107,7 | 1321,1 | 1636,4 | 2149.3 1116,3 | 1333,3 | 1655,2 | 2181.8 1125,0 | 1345,8 | 1674,4 | 2215.4 1133,9 | 1358,5 | 1694,1 | 2250.0 1142,9 | 1371,4 | 1714,3 | 2285.7 1152,0 | 1384,6 | 1734,9 | 2322.6 1161,3 | 1398,1 | 1756,1 | 2360.7 1170,7 | 1411,8 | 1777,8 | 2400.0 1180,3 | 1425,7 | 1800,0 | 2440.7 1190,1 | 1440,0 | 1822,8 | 2482.8 1200,0 | 1454,5 | 1846,2 | 2526.3 1210,1 | 1469,4 | 1870,1 | 2571.4 1220,3 | 1484,5 | 1894,7 | 2618.2 1230,8 | 1500,0 | 1920,0 | 2666.7 1241,4 | 1515,8 | 1945,9 | 2717.0 1252,2 | 1531,9 | 1972,6 | 2769.2 1263,2 | 1548,4 | 2000,0 | 2823.5 1274,3 | 1565,2 | 2028,2 | 2880.0 1285,7 | 1582,4 | 2057,1 | 2938.8 1297,3 | 1600,0 | 2087,0 | 3000.0 1309,1 | 1618,0 | 2117,6 | 3063.8
Выделенные в табл.8 значения частот устанавливаются на предприятии-изготовителе при отсутствии иных требований потребителя
при заказе.
6.6.4. Скорость обмена устройства телемеханическими сообщениями с УПУ устанавливается на предприятии-изготовителе при выпуске установкой/снятием перемычек на монтажных колодках из ряда: 50, 100, 200, 300 и 600 Бод - по согласованию с потребителем.
6.6.5. Параметры входных и выходных цепей:
1) номинальное значение входного и выходного сопротивлений КТМС в точках подключения к каналу связи - 600 Ом;
2) диапазон регулировки уровней сигналов на выходе передатчика ТЧ - от минус 28 до 0 Дб (от 30 мВ до 0,775 В); 3) чувствительность приемника КТМС не менее минус 26 Дб (30 мВ).
6.6.6. Входные и выходные интерфейсные сигналы, предназначенные для обмена с КУКП:
а) двунаправленные сигналы ДАННЫЕ;
б) выходной сигнал ОТВЕТ. Состоянию ОТВЕТ=0 соответствует готовность КТМС к обмену данными с КУКП, состоянию ОТВЕТ=1 - подтверждение приема данных;
в) входной сигнал РШ КТМС. Состоянию РШ КТМС=1 соответствует истинность информации на линиях ДАННЫЕ;
г) входной сигнал начальной установки процессора НУ. После выполнения последовательности НУ=0 и НУ=1 происходит рестарт процессора КТМС.
6.6.7. Уровни напряжений входных и выходных интерфейсных сигналов обмена КТМС с КУКП соответствуют: "высокий уровень" - от 2,4 до 5,25 В, "низкий уровень" - от 0 до 0,8 В.
6.6.8. Схема структурная КТМС приведена на рис.40. КТМС состоит из следующих основных узлов:
блок процессорный (ПБ) служит для управления режимами работы контроллера. Осуществляет прием-передачу информации и ее обработку;
576 кГц Выход +---+ +---+ +---------+ +----+ ЧМ | Г |->| ДЧ|----------------------->-| М |->| УС2|---> | | | |<-++----+ | +----+ | | | |---> +---+ +---+ +| НП | |>| СПС| +---------+ +----+ | | | | |-+ +----+ | +----+ | +----+ | | | +-^-----+ К КУКП Вход | +----+ +>| ДМ |->-| |<--------> ЧМ +----+ +----+ +----++>|СВПС| | | | ПБ | . --->-| УС1|->| ПФ |->| УО |->| |-->| | | | . --->-| | | | | | | | | | | |<--------> +----+ +----+ +----+ +----+ +----+ +-------+ | +----+К р/ст +----->| БУР|---> | |---> +----+
Рис. 40. Схема структурная КТМС
модулятор (М) предназначен для модуляции последовательного кода гармоническим сигналом;
узлы согласования (УС) предназначены для согласования физических параметров приемника и передатчика КТМС с линией связи (ЛС);
блок управления радиостанцией (БУР) служит для управления режимами ПРИЕМ/ПЕРЕДАЧА; полосовой фильтр (ПФ) служит для ослабления на входе приемника уровня гармонических сигналов, значения частот которых лежат за пределами установленной полосы пропускания;
детектор линейного сигнала (ДЛС) служит для контроля уровня сигнала, принятого из ЛС;
усилитель-ограничитель (УО) предназначен для усиления гармонических сигналов, принятых из ЛС, и согласования их с уровнями сигналов для микросхем серии 564;
схема выделения периодов сигналов (СВПС) обеспечивает формирование коротких импульсов по началу каждого периода входной частоты, поступающей с УС;
делитель частоты (ДЧ) служит для задания скорости обмена информацией в ЛС;
демодулятор (ДМ) предназначен для преобразования импульсной последовательности из СВПС в последовательный код;
схема побитной синхронизации (СПС) служит для синхронизации принимаемой из ЛС информации;
кварцевый генератор (Г) служит для формирования опорной частоты 576 кГц;
наборное поле (НП) предназначено для задания параметров обмена на канале ЧМ .
6.6.9. Адресация УКПМ на канале ТЧ производится монтажом перемычек на ответной части разъема "АДРЕС" на лицевой панели КТМС в соответствии с табл.9.
Краткое описание схемы электрической принципиальной КТМС, приведенной на рис.7 и табл.7 приложения
Блок процессорный реализован на микросхемах D1...D8. Модулятор выполнен на элементах D17, D23, D9.4, D28, VT6, D35, D36, D38, D40. С помощью резистора R35 устанавливается уровень выходного напряжения передатчика.
Узел согласования передатчика с линией связи реализован на транзисторах VT9, VT10 и трансформаторе TV2. Свечению индикатора VD7 соответствует наличие несущей на выходе передатчика. Узел согласования приемника с линией выполнен на трансформаторе TV1.
Блок управления радиостанцией выполнен на транзисторе VT2 и реле KV1.
Полосовой фильтр приемника КТМС реализован на микросхемах D15, D18, D21.
Детектор линейного сигнала выполнен на элементах D30, VT4, VT5, VT7, D34, D25.3, D11.4, D29.2. Свечение индикатора VD6 соответствует наличию несущей на входе приемника.
Таблица 9
Задание адреса УКПМ на линии ТЧ ------------------------------------------------------------------ Адрес | Наличие перемычек между контактами разъема "АДРЕС" УКПМ | модуля КТМС -------------|---------------------------------------------------- HEX | DEC | 5 и 3 | 5 и 4 | 5 и 7 | 5 и 8 | 5 и 2 | 5 и 1 ------|------|--------|--------|--------|--------|--------|------- 00 | 0 | есть | есть | есть | есть | есть | есть 01 | 1 | есть | есть | есть | есть | есть | нет 02 | 2 | есть | есть | есть | есть | нет | есть 03 | 3 | есть | есть | есть | есть | нет | нет 04 | 4 | есть | есть | есть | нет | есть | есть 05 | 5 | есть | есть | есть | нет | есть | нет 06 | 6 | есть | есть | есть | нет | нет | есть 07 | 7 | есть | есть | есть | нет | нет | нет 08 | 8 | есть | есть | нет | есть | есть | есть 09 | 9 | есть | есть | нет | есть | есть | нет 0A | 10 | есть | есть | нет | есть | нет | есть 0B | 11 | есть | есть | нет | есть | нет | нет 0C | 12 | есть | есть | нет | нет | есть | есть 0D | 13 | есть | есть | нет | нет | есть | нет 0E | 14 | есть | есть | нет | нет | нет | есть 0F | 15 | есть | есть | нет | нет | нет | нет 10 | 16 | есть | нет | есть | есть | есть | есть 11 | 17 | есть | нет | есть | есть | есть | нет 12 | 18 | есть | нет | есть | есть | нет | есть 13 | 19 | есть | нет | есть | есть | нет | нет 14 | 20 | есть | нет | есть | нет | есть | есть 15 | 21 | есть | нет | есть | нет | есть | нет 16 | 22 | есть | нет | есть | нет | нет | есть 17 | 23 | есть | нет | есть | нет | нет | нет 18 | 24 | есть | нет | нет | есть | есть | есть 19 | 25 | есть | нет | нет | есть | есть | нет 1A | 26 | есть | нет | нет | есть | нет | есть 1B | 27 | есть | нет | нет | есть | нет | нет 1C | 28 | есть | нет | нет | нет | есть | есть 1D | 29 | есть | нет | нет | нет | есть | нет 1E | 30 | есть | нет | нет | нет | нет | есть 1F | 31 | есть | нет | нет | нет | нет | нет ------------------------------------------------------------------
Усилитель-ограничитель собран на микросхемах D26, D32 и транзисторе VT8.
Схема выделения периодов сигнала реализована на микросхемах D37, D20.3, D14.3, D20.4.
Делитель частоты выполнен на микросхемах D12, D19, D24, D20.1, D20.2, D27.
Демодулятор собран на микросхемах D9.5, D29.1, D14.2, D9.6, D42, D45, D20.5, D14.4, D20.6, D25.2, D41.1, D41.2, D43.1.
Схема побитной синхронизации выполнена на микросхемах D16, D22, D13.2 и D44.1. Кварцевый генератор выполнен на микросхемах D9.1, D9.2, D9.3 и кварцевом резонаторе G2.
Питание элементов схемы осуществляется от внутреннего источника питания контроллера, реализованного на транзисторах VT13...VT18, трансформаторе TV3 и оптроне VE1. Свечение индикатора VD20 соответствует наличию основного напряжения плюс 5 В на выходе источника питания. Регулировкой резистора R69 устанавливают уровень этого напряжения в пределах +-0,25 В от номинального значения.
6.6.10. Режим передачи данных в ЛС
6.6.10.1. Режим передачи определяется моментом перевода сигнала по линии А0 порта А микросхемы D8 в состояние логической "1". Сигнал является разрешением для работы триггеров D28 модулятора.
Импульсы с ДЧ, частота следования которых равна скорости передачи информации по ЛС, поступают на входы синхронизации триггеров D33.1 и D33.2. Триггер D33.1 по фронту синхроимпульса с ДЧ фиксирует уровень текущего бита передаваемой информации (линия А3 порта А микросхемы D8). Информация с выхода триггера D33.1 поступает в качестве кода пересчета на управляемый делитель частоты (микросхемы D17, D23, D9.4, D28) модулятора. Таким образом на выходе управляемого делителя частоты в течение периода бита выводимой информации устанавливается меандр с характеристической частотой, значение которой соответствует коду пересчета. Этот меандр преобразуется полосовым фильтром (микросхемы D35, D36, D38) в гармонический сигнал и через УС передатчика выдается в ЛС.
По фронту синхроимпульса с ДЧ взводится триггер прерывания по приему D33.2. Выход триггера D33.2 соединен со входом прерывания INR3 центрального процессора D1. По прерыванию от триггера приема процессор КТМС кратковременно выставляет сигнал сброса триггера прерывания D33.2 (линия А4 порта А D8) для подготовки к следующему запросу и инициирует вывод на линию А3 порта А D8 очередного бита. Закончив передачу процессор блокирует линию А0 порта А D8 (А0=0) и переходит в режим приема из ЛС. Временная диаграмма режима передачи данных в ЛС приведена на рис. 14.
6.6.11. Скорость передачи информации в ЛС задается путем изменения коэффициента пересчета (N) ДЧ.
Коэффициент пересчета определяется по формуле:
N = 576000 / V*60, (1)
где V- скорость обмена информацией, Бод.
6.6.12. Характеристические частоты передачи информации в ЛС задаются путем изменения коэффициента пересчета управляемого делителя частоты модулятора.
Коэффициент пересчета определяется по формуле:
N = 576000 / 4*Fвых, (2)
где Fвых- характеристическая частота, задаваемая монтажом перемычек на колодках Х7 и Х8, Гц.
6.6.13. Входной сигнал из ЛС через УС приемника поступает на вход ПФ, который обеспечивает ослабление сигналов, значения частот которых расположены за пределами его полосы пропускания. С выхода ПФ сигнал выделенного спектра поступает на УО, в котором происходит преобразование гармонических сигналов в прямоугольные. По началу каждого периода преобразованного сигнала СВПС вырабатывает импульсы длительности частоты генератора Г. Последовательность импульсов - меток начала периодов поступает на вход схемы широтного компаратора (ШК) (микросхемы D42, D45, D20.5, D14.4). Порог срабатывания компаратора (средняя частота) устанавливается монтажом перемычек на колодке X12. На выходе ШК формируется признак одной из характеристических частот в зависимости от интервала времени между двумя соседними импульсами с СВПС. Этот признак поступает на триггеры D41, D43.1 демодулятора, которые преобразуют полученные сигналы в несинхронную последовательность двоичных данных в соответствии с принимаемой информацией. Синхронизация принимаемых данных производится СПС.
6.6.14. Значение средней частоты для ШК определяется по формуле:
N = 576000 / Fн+Fв, (3)
где Fн и Fв - соответственно нижняя и верхняя несущие частоты принимаемой информации, Гц.
6.6.15. В режиме приема данных из ЛС процессор деблокирует триггер D10.1 по линии А2 порта А D8 и устанавливает его в состояние "1" кратковременным изменением состояния на линии А1 порта А D8. Далее процессор деблокирует по линии А5 порта А D8 триггер прерывания по приему данных D44.2. При обнаружении 6-ти периодов несущей на входе приемника достаточной амплитуды (для этого в начале посылки отправляются "лидирующие нули") триггер D43.1 демодулятора деблокируется и готов в приему стартового бита посылки. По стартовому биту информации (значение "1") триггер D43.1 устанавливается в состояние "0". С его инверсного выхода сигнал переводом триггера D10.2 в состояние "1" запускает СПС. Последняя генерирует на выходе триггера D44.1 прямоугольные импульсы, передний фронт которых фиксирует в триггере D43.2 бит принимаемых данных в его середине и взводит триггер прерывания по приему D44.2.
По прерыванию приема процессор считывает бит данных с триггера D43.2 последовательным каналом ввода и сбрасывает триггер прерывания по приему D44.2. Последующие биты информации считываются аналогичным образом.
Временные диаграммы работы СПС и режимов приема данных по линии связи приведены на рис. 36 и 37.
6.6.16. Работа КТМС с радиостанцией
6.6.16.1. КТМС обеспечивает работу с радиостанцией, имеющей вход для подключения микротелефонной трубки (МТТ). При работе с радиостанцией контроллер подключается параллельно МТТ:
1) выход передатчика подключается параллельно микрофону;
2) вход приемника - параллельно телефонному капсюлю;
3) цепи сигналов управления радиостанцией подключаются к соответствующим контактам разъема ЛИНИЯ контроллера КТМС.
6.7. Описание модуля блока питания устройства (БП)
6.7.1. БП предназначен для питания модулей и контроллеров КПМ постоянным током напряжением (24+3,6-4,8) В.
6.7.2. Первичное питание БП (устройства) осуществляется от основного источника однофазной сети переменного тока напряжением (220+33-44) В и частотой (50+-2,5) Гц или от резервного источника постоянного тока напряжением (24+3,6-4,8) В.
6.7.3. Мощность, потребляемая БП от основного или резервного источника, не превышает 30 ВА при номинальной нагрузке.
6.7.4. Номинальное значение выходного напряжения БП - 24 В.
6.7.5. БП обеспечивает работу в диапазоне значений тока нагрузки от 0,2 до 1,2 А.
6.7.6. Суммарная нестабильность выходного напряжения, вызванная изменением величины входного напряжения в пределах допустимых значений, частоты питающего сетевого напряжения в пределах допустимых значений, тока нагрузки и температуры в допустимых пределах не превышает 5 %.
6.7.7. Сопротивление изоляции, измеренное между входными клеммами "220V" и выходными цепями БП при нормальных климатических условиях, не менее 20 МОм.
6.7.8. Габаритные размеры БП не более 65х255х260 мм3.
6.7.9. Масса БП не превышает 1,3 кг.
6.7.10. Устройство и работа БП
Схема структурная БП приведена на рис.41. БП состоит из сетевого фильтра, выпрямителя, конвертора, схемы управления конвертором и устройства включения резервного питания.
Схема электрическая принципиальная БП приведена на рис.8 и табл.8 приложения.
+---------+ +-------------+ Сеть ~220 В | Сетевой | | | ----------->| |--->| Выпрямитель |---+ | фильтр | | | | +---------+ +-------------+ | +----------------------------+ +-------------+ | +-------------------+ | Схема | +-->| Стабилизирующий | | управления | | |---->+ | конвертором |---->| конвертор | | Выход =24 В +-------------+ +-------------------+ |-----------> Резервное +--------------------+ | напряжение 24 В | Устройство | | ------------------>| включения |---->+ | резервного питания | +--------------------+
Рис. 41. Схема структурная БП
Сетевой фильтр состоит из конденсаторов C1, C2, C3, C4, дроcселей L1, L2 и используется для снижения уровня индустриальных радиопомех в цепях первичного питания, а также излучаемых устройством импульсных помех в сеть.
Сетевое напряжение 220 В с сетевого фильтра поступает на выпрямитель, выполненный на диодах VD2...VD5 и конденсаторах фильтра C5, C6.
Выпрямленное сетевое напряжение поступает на конвертор, выполненный на транзисторах VT5, VT4, диодах VD9, VD10, VD12, VD16, резисторах R10, R11, R12, R13, R16, конденсаторах C8, C9, C11, C12 и трансформаторе TV1.
Конвертор выполнен по схеме с обратным включением силового диода VD16 во вторичной обмотке. После подачи напряжения на конвертор транзистор VT5 открывается током через цепочку R11, R12, R13 и ток через обмотку I трансформатора (ток коллектора транзистора VT5 IVT5k) растет, вызывая нарастание магнитного потока в магнитопроводе трансформатора (см. рис. 42). ЭДС положительной обратной связи обмотки III способствует лавинообразному открыванию транзистора VT5. Полярность ЭДС обмотки II в период Ti такова, что диод VD16 закрыт и нагрузка блока питается током разряда конденсаторов фильтра C11 и C12. Происходит запасание магнитной энергии в магнитопроводе трансформатора. Ток в обмотке I трансформатора (IVT5k) нарастает до тех пор, пока падение напряжения на резисторе R16 через конденсатор C9 не откроет транзистор VT4. В этот момент VT5 прикрывается и ток обмотки I (IVT5k) резко уменьшается.
IVT5k| | /| /| | / | / | | / | / | IVT5kср| _/_ _|_ _ _ _ _ _ _ _ _/_ _| | / | / | |/ |_______________/ |_______ 0+------------------------------------t | Ti | Tp | |<--->|<------------->|
Рис. 42. Форма тока коллектора транзистора VT5. Здесь Ti и Tp- длительность импульса и паузы соответственно
Нарастание магнитного потока в трансформаторе прекращается, полярность ЭДС на обмотках трансформатора меняется на обратную и происходит лавинообразный процесс запирания транзистора VT5. Диод VD12 служит для форсирования процесса запирания транзистора VD5. Конденсатор C9 разряжается через диоды VD9, VD10 и резистор R16. Полярность ЭДС обмотки II трансформатора в период Tp такова, что диод VD16 открыт и запасенная в магнитопроводе энергия передается в нагрузку и на заряд емкостей фильтра C11 и C12 (рис. 43). Дроссель Е1 сглаживает короткие выбросы выходного напряжения напряжения блока.
| +U(II)|-----+ +---------------+ +---- | | | | | 0_|-----+-----+---------------+-----+-------t | | | | | -U(II)| +-----+ +-----+ | | | | | Ti | Tp | |<--->|<------------->|
Рис. 43. Форма напряжения на обмотке II трансформатора TV1. Здесь Ti и Tp- длительность импульса и паузы соответственно
Схема управления конвертором выполнена на транзисторе VT1, диоде VD11, стабилитроне VD8, резисторах R4...R6, R8 и конденсаторе C7. ЭДС обмотки IV трансформатора пропорциональна ЭДС выходной обмотки. Часть напряжения на конденсаторе C7, пропорциональная ЭДС обмотки II трансформатора, сравнивается с опорным напряжением на стабилитроне VD8 и разность напряжений определяет значение тока коллектора транзистора VT1 и, следовательно, момент открывания транзистора VT4. Таким образом обеспечивается частичная стабилизация выходного напряжения БП от колебаний тока нагрузки.
Устройство беспрерывного переключения на источник резервного питания служит для обеспечения непрерывного функционирования УКПМ при пропадании сетевого напряжения основного источника и выполнено на транзисторах VT2, VT3, диодах VD6, VD7, VD13, VD15, стабилитроне VD14, резисторах R3, R7, R9, R14, R15 и конденсаторе C10.
Напряжение резервного источника питания подается на устройство с клемм X1.1, X1.2 через предохранитель FU2, тумблер S2, и защитный диод VD6. Индикация наличия резервного питания, целостности предохранителя и включения тумблера, производится индикатором VD1. Диод VD6 предохраняет светодиод VD1 от повреждения при ошибочной смене полярности резервного питания.
При наличии напряжения сети 220 В и функционирующем конверторе, отрицательное напряжение на конденсаторе C10, c делителя напряжения R15, VD13 поступает на базу транзистора VT3 и запирает его. Транзистор VT2 при этом закрыт за счет внутренних резисторов смещения базы и источник резервного питания отключен.
При пропадании сети 220 В или неисправном конверторе запирающее напряжение на базе транзистора VT3 пропадает и транзистор открывается током через R7. Током коллектора VT3 открывается транзистор VT2 и резервный источник питания оказывается подключенным к нагрузке БП. Стабилитрон VD14 служит для форсирования переключения транзистора VT3, a диод VD13 защищает базовый переход транзистора VT3.
6.8. Устройство блока клеммных соединений (БКС)
6.8.1. БКС предназначен для выполнения внешнего монтажа цепей устройства на объекте. Соединения выполняются на клеммных колодках, обеспечивающих использование проводников с сечением жил до 2,5 мм2.
6.8.2. БКС конструктивно выполнен в виде блока с размерами не более 310х385х115 мм3.
6.8.3. БКС содержит четыре 48-ми контактные клеммные колодки для внешних подключений устройства. Колодки обеспечивают зажим оголенных концов проводников с сечением проводников не более 2,5 мм2. Схема электрическая БКС приведена на рис. 9 и табл. 9 приложения.
6.8.4. Доступ к клеммным колодкам обеспечивается после снятия крышки БКС.
6.8.5. БКС закрепляется на вертикальной несущей плоскости с помощью 4-х винтов М5.
- Вы здесь:
- Главная

- Инструкции
- СДТУ
- Инструкции по эксплуатации
- Телеконтроль и телеуправление в энергосистемах