Модернизация АСУ ТП ХВО на ТЭЦ-27
Тарасов Д. В., Мансуров А. А., Бедрин Б. К., инженеры ТЭЦ-27 Мосэнерго - НПК “Дельфин-Информатика”
Надежность работы энергетического оборудования ТЭЦ непосредственно связана с качеством подпиточной воды. Современные водоподготовительные установки должны отвечать требованиям экономичности, безопасности, простоты и надежности управления технологическим процессом обработки воды, что возможно только при внедрении автоматизированной системы управления.
Проектирование и строительство химводоочистки (ХВО) ТЭЦ-27 проводились в период 1990 - 1993 гг., при этом учитывался опыт эксплуатации водоподготовительных установок на других электростанциях. Основным вопросом ставилась максимально возможная в то время автоматизация технологического процесса водоподготовки и ее последующая модернизация по мере совершенствования программно-технических средств. Кроме того, руководители ТЭЦ-27 понимали, что для привлечения на ТЭЦ молодых специалистов на первое место будет выходить вопрос об условиях работы персонала, а также интерес его ко всему новому, прогрессивному. В связи с этим проект ХВО ТЭЦ-27 неоднократно корректировался.
Первоначально проект химводоочистки предполагал обычную для того времени систему контроля и управления, основанную на традиционных ключах, реле и громоздких щитах управления. Предполагалась пневмо- или гидроприводная запорная арматура обвязки фильтров. В таком виде проект ХВО не отвечал духу времени и дальнейшему развитию автоматизации ХВО. По предложению специалистов ТЭЦ-27 проект был пересмотрен как в части использования АСУ, так и в выборе привода запорной арматуры. Было принято решение о применении электроприводной запорной арматуры как наиболее надежной в эксплуатации и в наибольшей степени адаптированной в АСУ. Этот выбор полностью себя оправдал.
В начале 90-х годов отечественных полнофункциональных АСУ ТП еще не существовало, но уже были попытки их создания и определялись основные направления разработки.
Было принято решение реализовать АСУ ТП ХВО ТЭЦ-27 на базе программируемых контроллеров типа ТКМ-51, разработанных и выпускаемых НПО “Техноконт”. Это позволило создать распределенную техническую структуру, что с учетом размещения технологического оборудования химического цеха на большой площади обеспечило существенное сокращение кабельных трасс, упрощение монтажа, эксплуатации и ряд других преимуществ.
В результате стоимость пускового комплекса ХВО с АСУ ТП не превышала стоимости ХВО с традиционной системой управления за счет сокращения кабельных трасс.
Каждый контроллер ТКМ-51 имеет сравнительно малую информационную мощность (примерно 120 входов/выходов) и предназначен для обслуживания относительно небольшого технологического узла, например, одного осветлителя, двух механических трехкамерных фильтров и др. Размещен он непосредственно у оборудования в электрической сборке, осуществляющей управление выделенным технологическим подобъектом. Контроллеры ТКМ-51 являются по своему исполнению полевыми и достаточно надежно работают в сложных условиях эксплуатации.
На этапе создания в 1993 г. АСУ ТП ХВО объединяла на нижнем уровне по сети (BitBus) 108 контроллеров ТКМ-51.
Вся система обеспечивала автоматизацию технологического процесса следующего технологического оборудования: осветлителей; механических трехкамерных фильтров; Na-катионитовых фильтров; Н-катионитовых фильтров; анионитовых фильтров; фильтров установки очистки замасленных вод; баков и мешалок; насосов.
Поскольку применяемые в то время программно-технические средства не позволяли объединить управление всем оборудованием химического цеха в единую систему управления с сохранением необходимых технических характеристик, процесс химводоподготовки был разбит на три относительно автономных узла, для каждого из которых была разработана локальная подсистема:
обессоливающая установка; установка подпитки теплосети; склад хранения и подготовки реагентов.
Таким образом, АСУ ТП ХВО состояла из трех технически и программно-автономных подсистем контроля и управления.
Техническая и программная автономность перечисленных подсистем заключалась в том, что каждая из них была выполнена на базе отдельной группы контроллеров, объединенных между собой собственной сетью BitBus и реализующих функциональные программы только данной подсистемы.
Организационная автономность заключалась в том, что для каждой подсистемы имелось свое автономное автоматизированное рабочее место (АРМ) оператора-технолога, выполненное на базе программного обеспечения АРМ VNS.
Опыт эксплуатации АСУ ТП ХВО с 1993 по 1998 г. показал, что она является работоспособной, достаточно надежной и обеспечивает контроль и управление процессом. Вместе с тем, в процессе эксплуатации выявились и ее определенные недостатки, главными из которых явились:
аппаратное и организационное разделение системы на три автономные подсистемы оказалось неудобным, так как в схеме ХВО часть оборудования используется как при управлении установкой подпитки теплосети, так и установкой обессоливания. Поэтому оператору-технологу для ведения технологического процесса требовалось выполнять операции контроля и управления с разных АРМ, т.е. переходить с одного рабочего места на другое;
существующие АРМ операторов-технологов, реализованные на базе программного обеспечения АРМ VNS, не обеспечивали требуемых скоростей вызова и обновления информации, а также реакции системы на управляющие воздействия;
принятая система мнемокадров оказалась недостаточно удобной, в некоторых ситуациях оператору приходилось часто переходить с одного мнемокадра на другой;
система имела низкую степень автоматизации: в ней не могли быть реализованы такие важные функции, как программно-логическое управление процессами регенерации фильтров, работой баков и мешалок и другим оборудованием, регистрация событий, ведение архивов, ведение и печать оперативной и отчетной документации, ввод результатов анализов, выполнение требуемых расчетов, представление информации начальнику смены и др.
Но самым главным было то, что в этот период времени на ТЭЦ-27, основываясь на опыте эксплуатации локальных АСУ, была принята новая концепция о создании единой интегрированной АСУ ТП ТЭЦ, которая бы объединила в своем составе управление и контроль всего технологического оборудования станции. Существующая АСУ ТП ХВО в том виде реализации не могла удовлетворить требованиям этой интеграции.
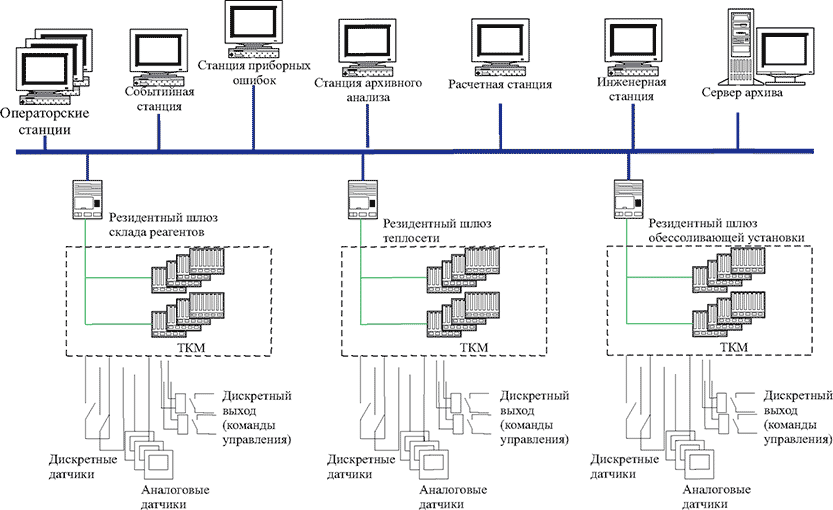
Структурная схема АСУ ТП ХВО ТЭЦ-27
В 1998 г. начались работы по модернизации АСУ ТП ХВО и интеграции ее в АСУ ТП ТЭЦ.
Базой для создания интегрированной АСУ ТП ТЭЦ-27 стал программно-технический комплекс “КВИНТ” разработки НИИТеплоприбор. Параллельно с вводом энергоблока № 2 на базе ПТК “КВИНТ” в 1998 г. была проведена модернизация и интеграция АСУ ТП ХВО и других объектов, выполненных ранее на технических средствах ТКМ и VNS (аналогично АСУ ТП ХВО), в единую АСУ ТЭЦ. Все работы по модернизации и интеграции АСУ ТП проводились силами специалистов ТЭЦ-27 с участием НПК “Дельфин-Информатика” в части разработки резидентных шлюзов.
Были выполнены следующие работы:
- Рабочая станция АРМ VNS была заменена операторской станцией ПТК “КВИНТ” как более совершенной и современной. Это обеспечило унификацию пользовательских интерфейсов операторов-технологов, форм ведения документации и архивов и другого в рамках всей интегрированной АСУ ТЭЦ.
- Для обеспечения связи контроллеров ТКМ-51 с верхним уровнем АСУ ТП ХВО фирмой “Дельфин-Информатика”, по техническому заданию и при участии специалистов ТЭЦ-27, были разработаны, так называемые, резидентные шлюзы. Это позволило:
объединить существующие автономные подсистемы контроля и управления технологическими установками в единую АСУ ТП ХВО с возможностью управления оборудованием различных подсистем с одной операторской станции;
повысить быстродействие системы по сравнению с АРМ VNS, так как структура ПТК “КВИНТ” предусматривает применение двух системных сетей - контроллерную на базе BitBus (медленной) и верхнего уровня на базе Ethernet (быстрой), в отличие от АРМ VNS, который включался только в контроллерную сеть BitBus.
- Выполнена интеграция локальных подсистем АСУ ТП ХВО в единую АСУ ТП ТЭЦ, что обеспечило обмен информацией с интегрированной АСУ ТП станции.
- Разработана и реализована новая система мнемокадров, в которой устранены недостатки прежней системы.
На рисунке показана структурная схема АСУ ТП ХВО со следующими техническими характеристиками:
общее число аналоговых входных сигналов 1360;
общее число дискретных входов 5016;
общее число дискретных выходов 3672;
максимальное удаление управляемого оборудования от щита управления 1,2 км.
АСУ ТП ХВО выполняет следующие функции:
контроль и представление оперативному персоналу информации о ходе технологического процесса и состоянии оборудования (значения технологических параметров, положения запорной арматуры и др.);
сигнализация отклонений параметров от заданных граничных значений и возникновения нештатных ситуаций;
автоматическое регулирование технологических параметров;
автоматическая блокировка аварийных ситуаций;
автоматическое включение резервных насосов (АВР);
дистанционное управление процессом с автоматизированного рабочего места оператора;
архивирование необходимой информации;
защита от несанкционированного доступа к информации и управлению технологическим оборудованием;
программно-логическое управление технологическими операциями;
автоматическое управление работой осветлителей;
получение и представление оперативному персоналу расчетной информации о работе химцехов (технический учет потребления на различные технологические операции и потерь химобессоленной, технической, городской и другой воды, реагентов);
формирование и вывод на печать за любой произвольно выбранный промежуток времени ведомостей работы технологического оборудования и расчетных технологических показателей химцехов.
В результате проделанной работы по интегрированию АСУ ТП ХВО в общестанционную интегрированную АСУ ТЭЦ (ИАСУ ТЭЦ) был реализован новый принцип контроля и управления, основанный на агрегатировании всего технологического оборудования химцеха и предусматривающий переход “от простого объекта (например, задвижка) к сложному (например, осветлитель), состоящему из простых”. До этого АСУ ТП ХВО основывалась только на контроле и управлении простыми локальными объектами.
В состав верхнего уровня АСУ ТП ХВО входят следующие АРМ:
оператора-технолога (аппаратчика) - оперативный контур;
начальника смены химцеха - неоперативный контур;
станция анализа - неоперативный контур;
инженерная станция специалиста цеха АСУ.
) располагается в помещении щита управления ХВО и содержит три взаимно резервируемые операторские станции, идентичные по аппаратному, информационному и программному обеспечению, и событийную станцию.
Оператор с любой из трех операторских станцАРМ оператора-технолога (аппаратчика ХВОий осуществляет наблюдение за ходом технологических процессов ХВО, задает режимы управления и работы оборудования химцеха, производит дистанционное управление исполнительными механизмами.
Для организации работы оператора-технолога сформирована система мнемокадров, построенная по общим принципам интегрированной АСУ ТЭЦ-27.
Для отображения реального состояния ручной арматуры, установленной на трубопроводах, используется мнемосимвол “ручная задвижка”, переводимый с операторской станции в положение “открыто” или “закрыто”.
Для поддержания параметров технологических процессов в заданном диапазоне в ХВО используется автоматическое регулирование (П, ПИ - законы регулирования). Для удобства работы операторов применяется статическая балансировка регуляторов. Оператор переводит в автоматический режим нажатием кнопки “АВТ” регулирующий клапан и регулятор поддерживает значение параметра, которое было в данный момент. Для изменения задания регулятору оператор пользуется программным задатчиком, задавая значение параметра в цифровом виде. Для ряда регуляторов установлено фиксированное значение параметра, которое можно изменить только с рабочего места сменного инженера цеха АСУ.
При возникновении нештатной ситуации имеется возможность обратиться к подсказкам, где рассмотрены причины ее возникновения по совокупности показаний приборов, автоматических и лабораторных методов контроля, а также действия оператора по ликвидации последствий аварийной ситуации.
Событийная станция предназначается для представления оператору-технологу информации о текущих событиях как штатных, так и нештатных (включение/выключение механизмов, изменение режимов работы, технологических ошибках и др.). Она помогает следить за последовательностью выполняемых операций при управлении работой установок, позволяет своевременно увидеть ошибки в работе оборудования.