Средства противоаварийного управления воздействием через системы возбуждения синхронных генераторов и компенсаторов реактивной мощности
Воздействие через систему возбуждения генераторов и компенсаторов реактивной мощности не приводит к непосредственному ущербу, не связано с расходованием ресурса (не имеет ограничений по числу воздействий), удобно для управления, не требует больших дополнительных затрат на реализацию, не ухудшает экономические показатели работы энергосистемы.
В основном используются непрерывные системы регулирования, которые доведены до высокой степени совершенства. Эти системы, особенно регуляторы возбуждения (АРВ) сильного действия обеспечивают существенное повышение уровня статической устойчивости и эффективное управление возбуждением во время переходных процессов. Принимая во внимание, что вопросы регулирования возбуждения и влияния его на функционирование энергосистем в нормальных и аварийных режимах подробно рассматриваются в других курсах, в данном пособии отмечаются лишь некоторые особенности поведения АРВ в переходных процессах, обуславливающие целесообразность дополнительных управляющих воздействий через систему возбуждения.
На рис. 19 приведена структурная схема системы возбуждения генератора с АРВ сильного действия.
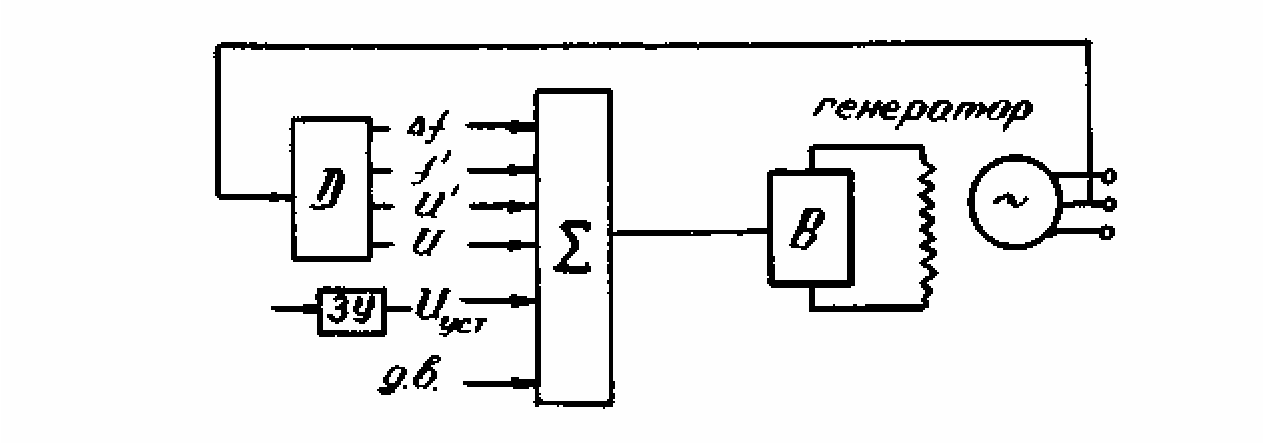
Рис.19
Обозначения на схеме: В - возбудитель, Σ - сумматор - усилитель АРВ, D- система датчиков-преобразователей параметров регулирования, ЗУ - задатчик уставки по напряжению (иуст.), и, и', f - параметры регулирования (обычно напряжение и его производная, отклонение и производная частоты), д.в. - дополнительный вход АРВ.
Параметры регулирования могут быть и другими. При слабом (пропорциональном) регулировании отсутствует группа параметров типа и', Aff ’ .
Современные системы регулирования обеспечивают возможность управления напряжением на обмотке возбуждения генератора без зоны нечувствительности с постоянной времени от 0.01:0.02 с при сильном регулировании до 0.5 с при пропорциональном с кратностью форсирования 1.6^4. Регуляторы синхронных и статических компенсаторов обладают близкими характеристиками, в них обычно используются параметры Δи, и', и", но отсутствуют , Δff.
Уровень поддерживаемого напряжения задается уставной по напряжению, изменение которой через ЗУ может осуществляться как правило, сравнительно медленно (на несколько процентов в секунду). Другие возможности воздействия на изменение режима или закона регулирования могут реализоваться подачей сигнала через д.в, блокированием или ступенчатым изменением коэффициента усиления того или иного параметра регулирования. При этом, например, подача через д.в сигнала, составляющего (0.05:0.1) иуст, при используемых обычно коэффициентах усиления по каналу Δ u= и - иуст приводит к полной форсировке напряжения на обмотке ротора через 0,03-0,05 с и подъему напряжения на статоре до нового уровня (на5-10% выше исходного) через 0.3:0.5 с.