Сфера приложения противоаварийного управления - аварийные режимы, прежде всего переходные электромеханические процессы.
Аварийные процессы в энергосистеме являются следствием возникновения повреждений оборудования, перекрытия и пробоя изоляции, ложных срабатываний различных устройств и аппаратов, ошибочных действий персонала, в результате которых, как правило, имеют место отключения элементов оборудования электростанций, передающей сети или потребителей. Сочетание первоначального возмущения (обычно, короткого замыкания) и последующего изменения исходной схемы называется аварийным возмущением. Аварийное возмущение называется проходящим, если его ликвидация не связана с необходимостью изменения исходной схемы или это изменение столь незначительно, что с ним в расчетах можно не считаться. С другой стороны, достаточно распространенной следует считать ситуацию, когда первоначальная причина (короткое замыкание) оказывает несоизмеримо меньшее воздействие на протекание аварийного процесса, чем следующее за ним отключение генерирующей мощности или ослабление сети. В этих случаях, а также при ложных (ошибочных) отключениях элементов энергосистемы аварийное возмущение сводится к внезапному изменению схемы. Переходный процесс, который имеет место в результате такого аварийного возмущения, называется "простым переходом".
Наиболее распространенными аварийными возмущениями, на которые прежде всего ориентируется противоаварийная автоматика, являются следующие три вида аварийных возмущений: короткое замыкание с последующим ослаблением сети, аварийное ослабление сети и аварийный сброс генераторной мощности (два последних приводят к "простым переходам"). Но и при таком ограниченном наборе основных расчетных видов аварийных возмущений в сложных энергосистемах с их многообразием схем и режимов может возникать бесчисленное множество разнообразных аварийных ситуаций.
Для пояснения физической сущности аварийных процессов и качественной оценки условий устойчивости в последующем во многих случаях используется классический аппарат анализа, основывающийся на тех или иных модификациях известного "правила площадей". Для использования его в каждом данном случае энергосистема должна быть приведена к так называемому "двухмашинному эквиваленту".
Введем понятие "опасного сечения". Оно определяет условное сечение связей в сложной энергосистеме, по которому происходит раздел ее на две части с различными частотами в случае нарушения устойчивости и возникновения асинхронного хода при данной аварийной ситуации.

Рис.1
Каждое из "опасных сечений" связано с некоторой характерной группой аварийных ситуаций. Число потенциальных "опасных сечений" в сложной схеме энергосистемы может быть достаточно большим, но вполне обозримым.
На рис.1 представлена скелетная схема некоторой условной энергосистемы, где Г1....Гт обозначают эквивалентные генераторные узлы, а Н1 -Нп - узлы нагрузки; i - j - эквивалентные связи, включающие линии электропередачи различных классов напряжения и трансформаторы. OC1...OC7 обозначены некоторые из возможных "опасных сечений". При указанных на рисунке направлениях перетоков мощности по связям достаточно очевидно, что, например, разрыв или ослабление связи 3-4 может привести к нарушению устойчивости с разделением энергосистемы на несинхронно вращающиеся части по сечениям OC2, OC3 или OC5, но вряд ли реально по сечениям OC4 или OC7. Те же сечения могут оказаться опасными при аварийном снижении генерации Г7. Кроме того, в этой аварийной ситуации "опасным" может оказаться сечение OC1 . Какое из названных претендентов на роль "опасного сечения" окажется действительно "опасным" при данной аварийной ситуации зависит от состава (пропускной способности) связей, входящих в каждое из этих сечений, значений перетоков мощности по связям и других причин.
Опуская вопрос о практических способах выявления "опасного сечения", обратимся к эквивалентной схеме энергосистемы, которая может быть получена в результате приведения генераторов и нагрузок, расположенных по разные стороны "опасного сечения", к двум эквивалентным генераторным и нагрузочным узлам Г1Э, Г2Э , Н1Э , Н2Э (рис.2,а). Эта "двухмашинная" схема замещения представляет исходную схему энергосистемы рис.1 применительно к некоторой группе аварийных ситуаций, для которых "опасным" является одно и то же сечение, причем связь между эквивалентными узлами в схеме рис.2,а имеет ту же пропускную способность (уровень устойчивости), что и в "опасном сечении" исходной схемы.

Рис. 2
Для исследования всей совокупности аварийных ситуаций необходимо рассматривать такое количество схем замещения, которое соответствует числу возможных "опасных сечений".
Известно, что для анализа электромеханических переходных процессов в схеме рис.2,а может использоваться следующая система уравнений:
 (1)
(1)
где И1, HJ2 - значения инерционных постоянных эквивалентных генераторов Г1Э, Г2Э , приведенные к базисной мощности; Е1, Е2 - значения ЭДС
эквивалентных генераторов; δ1 , δ2 - углы векторов ЭДС Е1 и E2 относительно
синхронно вращающейся оси; δ12 =δ1-δ2 - угол между векторами ЭДС Е1 и Е 2;
Z11, Z22, Z12 модули собственных и взаимного сопротивлений; α11, α22, α12 - дополнительные до 90° углы сопротивлений; Z11, Z22, Z12 ; РТ1 , РТ2 - приведенные к базисному значению моменты (мощности) первичных двигателей эквивалентных генераторов Г1Э, Г2Э .
Выделим два характерных случая, определяемых соотношением параметров эквивалентных узлов схемы 2,а в зависимости от рассматриваемого "опасного сечения".
В случае отделения "опасным сечением" удаленной электростанции (например, Г7 при рассмотрении ОС4) эквивалентная схема 2,а вырождается в простейшую: машина-линия - "шины бесконечной мощности" (рис.2,6),
электромеханические переходные процессы в которой могут описываться уравнением:
 (2)
(2)
где HJ, PT ,Pm - инерционная постоянная, момент (мощность) первичного двигателя и максимум моментно-угловой характеристики эквивалентного генератора удаленной электростанции (в рассматриваемом примере - Г7); δ- угол между векторами ЭДС генератора и напряжения "шин бесконечной мощности".
В других случаях "опасное сечение" разделяет исходную схему энергосистемы на две подсистемы с соизмеримыми суммарным и мощностями электростанций в каждой из них. Для этих случаев система уравнений (I) приводится к виду:
 (3)
(3)
Очевидна аналогия уравнений (3) и (2), а следовательно и возможность использования единой методики анализа. При этом, однако, следует иметь в виду, что уравнением (3) описывается только относительное движение эквивалентных генераторов, и лишь в пределах этой составляющей движения можно вести анализ с использованием (3). В последующем изложении, при отсутствии соответствующих оговорок, анализ процессов с использованием "правила площадей" ведется без учета изменения частоты в энергосистеме. При этом независимо от типа двухмашинной схемы используются обозначения, принятые в (2).
Применительно к случаю короткого замыкания (к.з.) с последующим ослаблением связи в "опасном сечении" для применения "правила площадей" следует рассмотреть три характерных моментно-угловых характеристики: при полном составе связи, во время короткого замыкания и после отключения поврежденного участка (ослабления) связи. Эти характеристики, приведенные на рис.3, обозначены соответственно а, б, в, а соответствующие им значения
![]() Значение PT в течение рассматриваемого здесь интервала переходного процесса предполагается неизменным.
Значение PT в течение рассматриваемого здесь интервала переходного процесса предполагается неизменным.
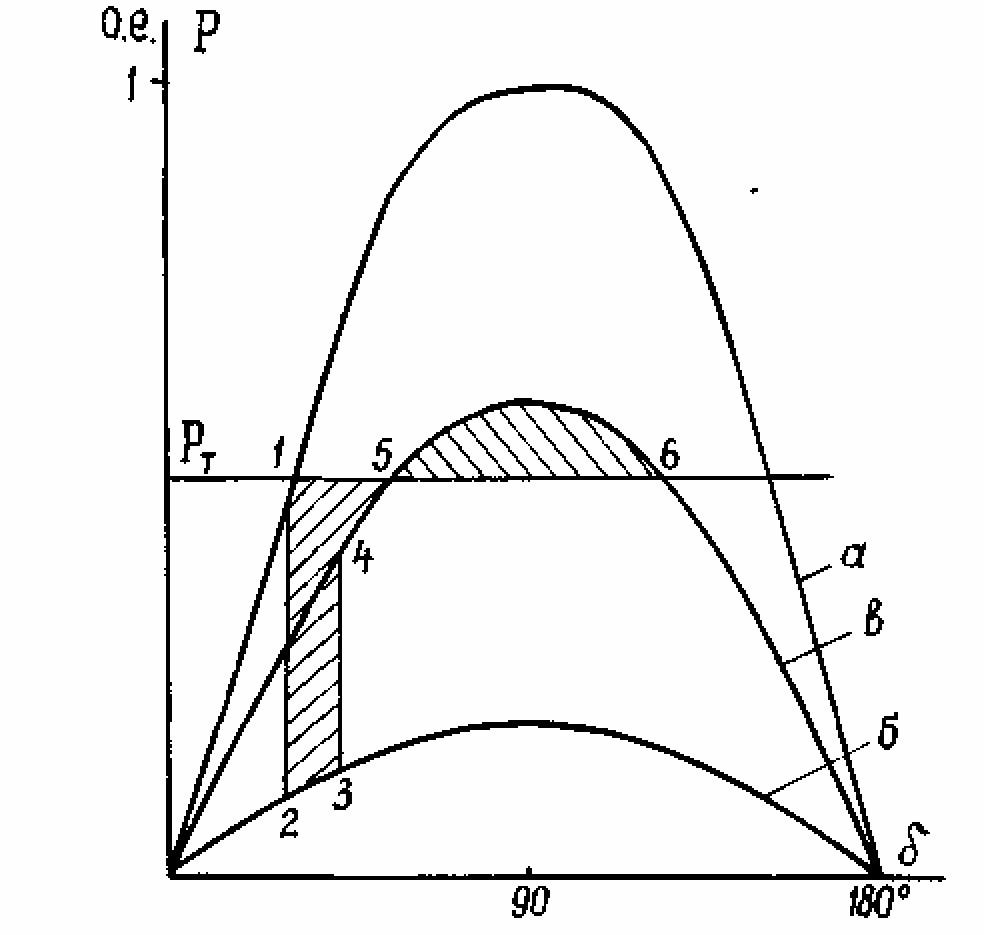
Рис. 3
В исходном режиме система находится в состоянии равновесия ![]() которому соответствует точка I пересечения прямой PT и синусоиды "а" на рис.3. В момент возникновения короткого замыкания Рт снижается до значения, соответствующего новым условиям, и происходит переход на характеристику "б". При этом в силу инерционности вращающихся масс роторов угол δ остается неизменным. Далее в результате возникшего небаланса угол начинает расти и за время короткого замыкания
которому соответствует точка I пересечения прямой PT и синусоиды "а" на рис.3. В момент возникновения короткого замыкания Рт снижается до значения, соответствующего новым условиям, и происходит переход на характеристику "б". При этом в силу инерционности вращающихся масс роторов угол δ остается неизменным. Далее в результате возникшего небаланса угол начинает расти и за время короткого замыкания
![]() достигает значения, соответствующего точке 3. В момент
достигает значения, соответствующего точке 3. В момент
отключения поврежденной ЛЭП происходит переход на характеристику "в", и под действием накопленной за время короткого замыкания избыточной кинетической энергии и, возможно, сохраняющегося небаланса продолжается увеличение угла δ.
В соответствии с "правилом площадей" устойчивость параллельной работы сохраняется, если выполняется условие энергетического баланса, которое графически интерпретируется соотношением площадок ускорения и торможения:
![]() (4)
(4)
определяемых на основе вычисления интегралов:
 (5)
(5)
где δ - значение угла δ соответствующее точке i на характеристике.
Аналогичным образом определяются условия устойчивости в случае "простого перехода", связанного с ослаблением связи без короткого замыкания. При этом лишь исключается переход на характеристику б.
Рассмотрение "простого перехода", связанного с отключением
генерирующей мощности ΔΡΓ2 приемной части энергосистемы, имеет смысл лишь в схеме типа 2, а. При этом в момент возникновения аварийного возмущения происходит изменение значений РГ2и HJ2. и в результате - значения Рт на некоторую величину ΔΡΤ.
В большинстве практически важных случаев относительное изменение инерционной постоянной невелико (ΔΗ2 <<HJ2) и с ним при определении ΔΡΤ можно не считаться. При этом допущении ΔΡΤ определяется после соответствующих преобразований выражения для РТэ в (3) в виде:
 (6)
(6)
Иногда при аварийном отключении генераторной мощности приходится считаться с изменением Изменение
Изменение очевидно, приведет к дополнительной корректировке значения ΔΡΤ, а изменение Рт связано с переходом на новую моментно-угловую характеристику.
очевидно, приведет к дополнительной корректировке значения ΔΡΤ, а изменение Рт связано с переходом на новую моментно-угловую характеристику.
При сохранении устойчивости во время электромеханического переходного процесса энергосистема переходит к квазиустановившемуся режиму, а затем под действием регуляторов скорости турбин и вторичных систем регулирования частоты и мощности - к новому стационарному режиму, который в зависимости от характера аварийного возмущения и воздействия системы противоаварийного управления как правило отличается от исходного. При этом противоаварийное управление должно осуществляться с учетом требований и этого режима.
Особые условия в энергосистеме создаются при нарушении устойчивости и возникновении асинхронного хода, который, как правило, сопровождается глубокими изменениями режимных параметров. Существующие расчетные методы позволяют в лучшем случае рассчитать изменение основных параметров энергосистемы лишь в начальной стадии развития асинхронного хода и получить некоторые приближенные оценки возможности его развития в результате резонансных явлений и "опрокидывания" нагрузки в отдельных узлах. Однако дальнейшее развитие процесса, особенно в случае многократных нарушений устойчивости (при так называемом многочастотном асинхронном ходе) оказывается весьма трудно прогнозируемым. Вместе с тем по мере распространения асинхронного хода управляемость энергосистемы резко падает, и в результате развития аварии может привести к большим ущербам для народного хозяйства, нарушениям условий безопасности и другим тяжелым последствиям. Поэтому одной из важнейших задач является локализация и скорейшее прекращение асинхронного хода, независимо от вызвавшей его причины.