7. ОПРЕДЕЛЕНИЕ РАБОЧИХ ХАРАКТЕРИСТИК, КОЭФФИЦИЕНТА ПОЛЕЗНОГО ДЕЙСТВИЯ, КОЭФФИЦИЕНТА МОЩНОСТИ И СКОЛЬЖЕНИЯ
7.1. Под рабочими характеристиками понимают зависимости подводимой мощности, тока, момента, скольжения, коэффициента полезного действия (КПД) и коэффициента мощности от отдаваемой мощности при номинальных значениях напряжения и частоты.
Определение — по ГОСТ 25941.
(Измененная редакция, Изм. № 1)
7.2. Рабочие характеристики двигателей мощностью до 100 кВт следует определять из опытов непосредственной нагрузки при номинальном напряжении, для двигателей мощностью от 100 до 1000 кВт допускаются отклонения напряжения от номинального не более чем на ±10%.
Для двигателей мощностью выше 1000 кВт, вертикального исполнения, двигателей на частоту отличную от 50 Гц, а также при отсутствии необходимого оборудования, допускается определять рабочие характеристики из опытов непосредственной нагрузки при пониженном напряжении, по схемам замещения с одним контуром на роторе, по частотным характеристикам (см. разд. 10), по круговым диаграммам (см. приложение 2).
7.3. Рабочие характеристики снимают при 5—10 значениях нагрузки в пределах от 110—130% номинальной до холостого хода при температуре обмоток, близкой к рабочей. Сначала снимают отсчеты при нагрузке, близкой к номинальной, затем при других значениях нагрузки, начиная от максимальной. При определении КПД непосредственным способом напряжение должно быть равно номинальному.
При снятии рабочих характеристик следует измерять частоту, линейные напряжения и токи, подводимую мощность и скольжение, а при определении КПД непосредственным способом дополнительно следует измерять момент или отдаваемую мощность с помощью тарированной вспомогательной машины. Линейный ток измеряют тремя амперметрами, подводимую мощность — по схеме двух ваттметров, трехфазным ваттметром или по схеме трех ваттметров. При использовании схемы двух ваттметров для контроля целесообразно определить коэффициент мощности по п. 7.5 и по отношению показаний двух ваттметров (п. 1.5). Сходимость результатов свидетельствует о правильности измерений.
7.3.1. Скольжение двигателя следует определять одним из следующих способов:
1) стробоскопическим. Для этого на валу двигателя наносят метки, число которых равно числу пар полюсов. Освещая вал стробоскопической лампой, питаемой от той же сети, что и испытуемый двигатель, измеряют время прохождения определенного количества меток мимо неподвижного указателя, считая прохождение метки в момент пуска секундомера за нулевое;
2) при помощи индуктивной катушки. Катушку размещают у торца двигателя, предварительно определив положение, при котором стрелка гальванометра совершает наиболее заметные качания и измеряют время определенного количества колебаний;
3) по частоте тока ротора. В цепь фазного ротора двигателя с постоянно налегающими щетками включают шунт, к которому подсоединяют милливольтметр магнитоэлектрической системы с нулем в середине шкалы и измеряют время определенного числа периодов качаний стрелки.
Скольжение S определяют по формуле
![]() ,
,
где N — число прохождения меток мимо указателя или число полных колебаний стрелки прибора (N » 10—20);
Т — длительность опыта, с;
f — частота источника питания испытуемого двигателя, Гц.
Допускается определять скольжение по приборам, предназначенным для измерения частоты вращения или скольжения, обеспечивающим определение скольжения с погрешностью, не превышающей 5 %. Дополнительная нагрузка, создаваемая такими устройствами, не должна превышать 1 % полезной мощности.
При необходимости измеренные значения скольжений приводятся к расчетной рабочей температуре обмотки статора по формуле
 ,
,
где Sp — скольжение при расчетной рабочей температуре Jр, °С;
S1 — скольжение, измеренной при температуре опыта J1, °С;
a — температурный коэффициент сопротивления материала обмотки.
Расчетная рабочая температура — по ГОСТ 25941 в соответствии с классом изоляции обмотки статора двигателя.
(Измененная редакция, Изм. № 2)
7.3.2. При измерении момента следует использовать динамометры. Рекомендуется выбирать динамометр таким образом, чтобы полная шкала динамометра не превышала номинальный момент двигателя более чем в три раза. Допускается измерять вращающий момент на статоре испытуемого двигателя, подвешенного между валом нагрузочной машины и вращающимся центром или в люльке, соосной с валом нагрузочной машины, качающейся в собственных подшипниках. Рекомендуется определить поправку на момент по формуле
![]() ,
,
где ![]() — мощность, кВт, потребляемая испытуемым двигателем при вращении ненагруженного динамометра (невозбужденной нагрузочной машины) или установленного в люльке двигателя при вращении невозбужденной нагрузочной машины;
— мощность, кВт, потребляемая испытуемым двигателем при вращении ненагруженного динамометра (невозбужденной нагрузочной машины) или установленного в люльке двигателя при вращении невозбужденной нагрузочной машины;
Р0 — мощность подводимая к испытуемому асинхронному двигателю на холостом ходу, кВт;
n — частота вращения испытуемого двигателя, с ненагруженным динамометром, мин-1;
М' — показания динамометра или весового устройства при вращении испытуемым двигателем ненагруженного динамометра или невозбужденной нагрузочной машины, Н·м.
Значение момента М определяют по формуле
М = Мизм + DМ,
где Мизм — измеренное значение момента.
(Измененная редакция, Изм. № 1)
7.4. Определение рабочих характеристик из опытов непосредственной нагрузки при пониженном напряжении допустимо для двигателей, у которых ток холостого хода не превышает 40 % номинального.
7.4.1. Если при снятии рабочих характеристик напряжение отличается от номинального не более чем на 20 %, измеренные значения тока и подводимой мощности приводят к номинальному напряжению следующим образом
S = Sr,
![]() ,
,
![]() ,
,
![]() ,
,
где Ur, Sr, P1r, I0r, Ir, соsj0r — напряжение, скольжение, подводимая мощность, ток холостого хода и ток при нагрузке, коэффициент мощности при напряжении Ur;
S, P1, I0, I, соsj0 — аналогичные величины при номинальном напряжении.
Допускается приведение тока статора к номинальному напряжению графическим способом в соответствии с черт. 4.
![]() .
.
(на черт. 4 jr и j — углы между векторами напряжения и тока при пониженном и номинальном напряжениях).
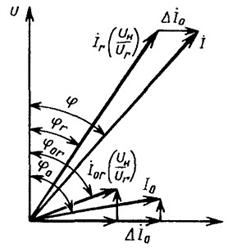
Черт. 4
7.4.2. Если напряжение отличается от номинального более чем на 20 %, то пересчет следует производить по п. 7.6.
7.5. Обработку результатов измерений следует производить следующим образом.
Коэффициент мощности вычисляют по формуле
![]() ,
,
где Р1 — подводимая мощность, кВт;
Uн — номинальное линейное напряжение, В;
I — линейный ток, А.
При определении непосредственным методом КПД в % вычисляют по формуле
![]() ,
,
где Р2 — отдаваемая мощность, кВт, определенная по измеренному моменту и частоте вращения, либо по данным измерений на тарированной вспомогательной машине;
P1 — подводимая мощность, кВт.
При определении методом отдельных потерь КПД в % вычисляют по формуле
![]()
где SР = Рм1 + Рст + Рм2 + Рмех + Рдоб — сумма потерь,
где Рм1 — потери в обмотке статора, кВт;
Рм1 = 1,5I2R1л·10-3,
где I — линейный ток, А;
R1л — сопротивление, Ом, между двумя линейными выводами обмотки статора, измеренное непосредственно после опыта при температуре, соответствующей данной нагрузке. Если сопротивление или температура обмотки не измерялись, то R1л, измеренное в холодном состоянии машины, приводится к расчетной рабочей температуре по ГОСТ 25941;
Рст, Рмех — потери в стали и механические, кВт, определенные из опыта холостого хода;
Рм2 — потери в контурах ротора, кВт, вычисляемые по формуле
Рм2 = (Р1-Рст-Рм1)·S,
где S — скольжение.
Для двигателей с фазным ротором эта формула учитывает и потери в щеточном контакте.
Рдоб — добавочные потери в кВт определяют по п. 11.3 настоящего стандарта и ГОСТ 25941.
Отдаваемую мощность Р2 определяют как разность между подводимой мощностью Р и суммой всех потерь SР.
Вращающий момент в Н·м вычисляют по формуле
![]() ,
,
где n— частота вращения, мин-1.
Рабочие характеристики представляют в табличной либо в графической форме. Допускается представлять рабочие характеристики в функции от подводимой мощности.
(Измененная редакция, Изм. № 1, 2)
7.6. Расчет по схемам замещения с одним контуром на роторе следует производить по форме 4 приложения 1. Параметры схем замещения следует определять по формам 1—3 приложения 1. Параметры намагничивающего контура берутся при номинальном напряжении, параметры рабочего контура — при пониженном. Расчеты по схемам замещения с параметрами, определенными при пониженном напряжении, могут применяться только для машин с относительным током холостого хода не более 0,4.
7.7. При определении действительных потерь и КПД добавочные потери находят по п. 11.3, а потери в обмотке статора вычисляют по току и сопротивлению, измеренным при номинальном режиме работы.