11. ОПРЕДЕЛЕНИЕ ДОБАВОЧНЫХ ПОТЕРЬ
11.1. Добавочные потери делятся на добавочные потери холостого хода Рдоб.0 и добавочные потери при нагрузке Рдоб. Первые входят в потери в стали, определяемые из опыта холостого хода, вторые представляют сумму добавочных потерь основной частоты Pдоб.1 и высокочастотных добавочных потерь от высших гармоник поля Pдоб.v.
11.2. Добавочные потери холостого хода определяются методом скачка гистерезиса. Испытуемый двигатель, включенный на номинальное напряжение, вращают динамометром или тарированной машиной постоянного тока с частотой вращения около синхронной. Рекомендуется проводить измерения в 5 точках при частоте вращения выше и ниже синхронной. Измеряют потребляемую, мощность, момент и скольжение. При синхронной частоте вращения измеряют ток статора, далее при отключенном от сети двигателе при синхронной частоте вращения измеряют мощность динамометра, равную механическим потерям испытуемого двигателя. После отключения и остановки двигателя измеряют сопротивление обмотки статора.
Мощность, подводимая из сети, и мощность на валу динамометра строят в зависимости от скольжения (черт. 9). Эти прямые отсекают на оси ординат при скольжении, равном нулю, некоторые отрезки, обусловленные явлением гистерезиса. Середина верхнего отрезка дает сумму основных потерь в стали Pст.осн и потерь, в меди статора Pм1, середина нижнего отрезка дает сумму добавочных потерь холостого хода и механических потерь испытуемого двигателя.
![]() ,
,
где Pст.осн + Pм1 — определяют по черт. 9, Рм1 рассчитывают по измеренным току и сопротивлению;
![]() ,
,
где Pдоб.о + Pмех определяют по черт. 9, Pмех — из опыта холостого хода при отключении испытуемого двигателя.
Правильность результата проверяют по формуле
![]() .
.

Черт. 9
(Измененная редакция, Изм. № 1)
11.3. Нагрузочные добавочные потери двигателей с КПД не выше 85 % определяют методом непосредственной нагрузки. Добавочные потери двигателей с КПД выше 85 % определяют методом взаимной нагрузки с использованием тарированной асинхронной машины с фазным ротором двойного питания, методом обратного вращения или методом синхронного короткого замыкания (для двигателей с фазным ротором).
11.3.1. При определении добавочных потерь методом непосредственной нагрузки дополнительно измеряют сопротивление обмотки статора для каждой точки. Опыт проводят одновременно с опытом снятия рабочих характеристик. Добавочные потери рассчитывают по формуле
![]() ,
,
где Рм1 — потери в меди статора, кВт, рассчитанные по измеренным токам и сопротивлению обмотки статора;
Рм2 — потери в контурах ротора, кВт, рассчитанные по измеренному скольжению;
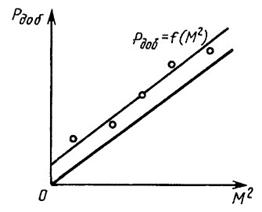
Эти потери строят в зависимости от квадрата момента (черт. 10). Методом наименьших квадратов находится прямая, отсекающая на оси ординат некоторый отрезок B
Pдоб = аМ2 + В,
где а — угловой коэффициент прямой;
М — момент.
По экспериментальным точкам и уравнению прямой находят коэффициент корреляции. Если коэффициент корреляции больше или равен 0,9 и коэффициент а положителен, полученную прямую параллельно переносят в начало координат и по ней определяют добавочные потери. Если коэффициент корреляции меньше, чем 0,9 — отбрасывают наихудшую точку и повторяют расчет. Если при этом коэффициент корреляции возрастает до 0,9 или более, то используют второй расчет, если не возрастает или наклон отрицателен, то испытание считается неудовлетворительным и должно быть повторено.
При повторных испытаниях строят зависимость момента от электрической мощности при постепенном увеличении нагрузки. Для каждой серии показаний строится момент в зависимости от электрической мощности и следует использовать среднее значение этих кривых.
Черт. .10
(Измененная редакция, Изм. № 2)
11.3.2. При определении добавочных потерь методом взаимной нагрузки испытуемый двигатель соединяют механически с тарированным двигателем с фазным ротором. Оба двигателя питаются параллельно от одного источника. С помощью независимого регулируемого источника низкой частоты, питающего фазный ротор, устанавливают номинальную нагрузку испытуемого электродвигателя при общем коэффициенте мощности близком к 1. Измеряют общую мощность (ваттметрами или счетчиком энергии), токи статора двух машин, сопротивления обмоток статора и соединительных проводов. Опыт проводят одновременно с опытом снятия рабочих характеристик. Добавочные потери при номинальной нагрузке определяют по формуле
![]() ,
,
где Р1 — мощность, подводимая из сети, кВт;
Рм1 — сумма потерь в меди статора двух машин и в соединительных проводах, кВт;
Рдоб.ф — добавочные потери в двигателе с фазным ротором, кВт;
Р0 — сумма потерь в стали и механических двух электродвигателей, практически равная подводимой мощности при скольжении, равном нулю (нулевой частоте питания ротора), кВт.
Добавочные потери в тарированном двигателе с фазным ротором могут быть определены при испытании данным методом двух одинаковых машин с фазным ротором в асинхронном или синхронном режиме.
(Измененная редакция, Изм. № 1)
11.3.3. Определение добавочных потерь методом обратного вращения предусматривает раздельное их определение от основной частоты и высокочастотных. Добавочные потери при номинальной нагрузке определяют для тока статора равного
![]() ,
,
где I0 — ток холостого хода, А.
Добавочные потери от основной частоты Рдоб.1 определяют при вынутом роторе, при этом остальные конструктивные части (подшипниковые щиты и др.) остаются на своих местах. На статор подают пониженное напряжение, измеряют мощность, токи и сопротивление обмотки статора после каждой точки нагрузки. Снимают 4—6 точек при токах от 0 до номинального. Потери определяют по формуле
![]() ,
,
где Р1 — подводимая мощность, кВт;
Рм1 — потери в меди статора, кВт, определенные по измеренным токам и сопротивлению.
При определении высокочастотных добавочных потерь методом обратного вращения испытуемый электродвигатель при пониженном напряжении вращают с синхронной частотой вращения против поля динамометром или калиброванной машиной меньшей мощности. Частота вращения может быть определена стробоскопическим метолом или цифровым тахометром. Измеряют мощности, подводимые к статору и ротору, токи и сопротивление обмотки статора после каждой точки. Снимают 4—6 точек при изменении тока от номинального до 0. Высокочастотные добавочные потери вычисляют по формуле
![]() ,
,
где Р2 — мощность, кВт, подводимая к ротору при токе статора I1;
Р20 — мощность, кВт, подводимая к ротору при токе статора равном нулю (при отключенном двигателе);
P1 — мощность, кВт, подводимая к обмотке статора;
Рм1 — потери в меди статора, кВт;
Рдоб.1 — добавочные потери, кВт, основной частоты;
По данным опытов следует построить зависимость механической мощности (первая скобка) и электромагнитной мощности (вторая скобка) от квадрата измеренного тока.
При отсутствии динамометра и калиброванной машины высокочастотные добавочные потери надлежит определять следующим способом.
Испытуемый двигатель подключают к источнику питания и приводят во вращение в режиме холостого хода с частотой вращения, равной 1,1—1,15 синхронной. Затем источник питания отключают, и на статор подают пониженное напряжение номинальной частоты с обратным чередованием фаз. В процессе торможения ротора измеряют мощность, подведенную к статору, токи статора, частоту вращения и сопротивление обмотки статора после каждого опыта. Проводят 5—6 опытов при различных значениях тока I в пределах от нуля до номинального. Из каждого опыта определяют мощность, ток и ускорение ротора по ГОСТ 11828 при синхронной частоте вращения ротора.
Высокочастотные добавочные потери вычисляют по формуле

где Рмех — механические потери испытуемого двигателя;
![]() и
и ![]() — ускорение ротора при токе I = I1 и I = 0.
— ускорение ротора при токе I = I1 и I = 0.
(Измененная редакция, Изм. № 1, 2)
11.3.4. При определении добавочных потерь методом синхронного короткого замыкания определяют добавочные потери основной частоты и высокочастотные добавочные потери. При определении добавочных потерь ротор вращают с синхронной частотой вращения динамометром или тарированной машиной постоянного тока меньшей мощности. В обмотку ротора подается постоянный ток, а обмотка статора замыкается накоротко через амперметры, снимают 4—6 точек при токах от номинального до 0. Добавочные потери определяют по формуле
![]() ,
,
где Р2 — мощность, кВт, подводимая к ротору при токе статора I1;
Р20 — мощность, кВт, подводимая к ротору при вращении с синхронной частотой вращения невозбужденного испытуемого двигателя;
Рм1 — потери в меди статора, кВт, рассчитанные по измеренным токам и сопротивлению.
12. ТРЕБОВАНИЯ БЕЗОПАСНОСТИ
12.1. Электрические испытания двигателей и измерения должны проводиться в соответствии с требованиями безопасности по ГОСТ 12.3.019 и пожарной безопасности по ГОСТ 12.1.004. При испытаниях должны соблюдаться действующие «Правила техники безопасности при эксплуатации электроустановок потребителей».
Особое внимание следует обращать на технику безопасности при испытании изоляции обмоток на электрическую прочность, при испытании на повышенную частоту вращения, а также при определении тока и потерь короткого замыкания. В последнем случае перед началом опыта обязательно должно быть проверено направление вращения.
(Измененная редакция, Изм. № 2)