По принципу действия датчики делятся на два класса:
- Параметрические.
- Генераторные.
В зависимости от вида входной величины различают датчики перемещения, скорости, ускорения, усилия, уровня, вибрации,, температуры, давления и т. п.
Датчики по устройству могут быть разделены на датчики с непосредственным преобразованием, когда изменение управляющего параметра х вызывает непосредственно изменение управляемого параметра у, и датчики с промежуточным преобразованием, когда изменение параметра х вызывает изменение вспомогательного параметра υ, а изменение параметра ν вызывает изменение нового параметра и т. д. и, наконец, последний параметр вызовет изменение параметра у.
Индукционные датчики для передачи угловых перемещений
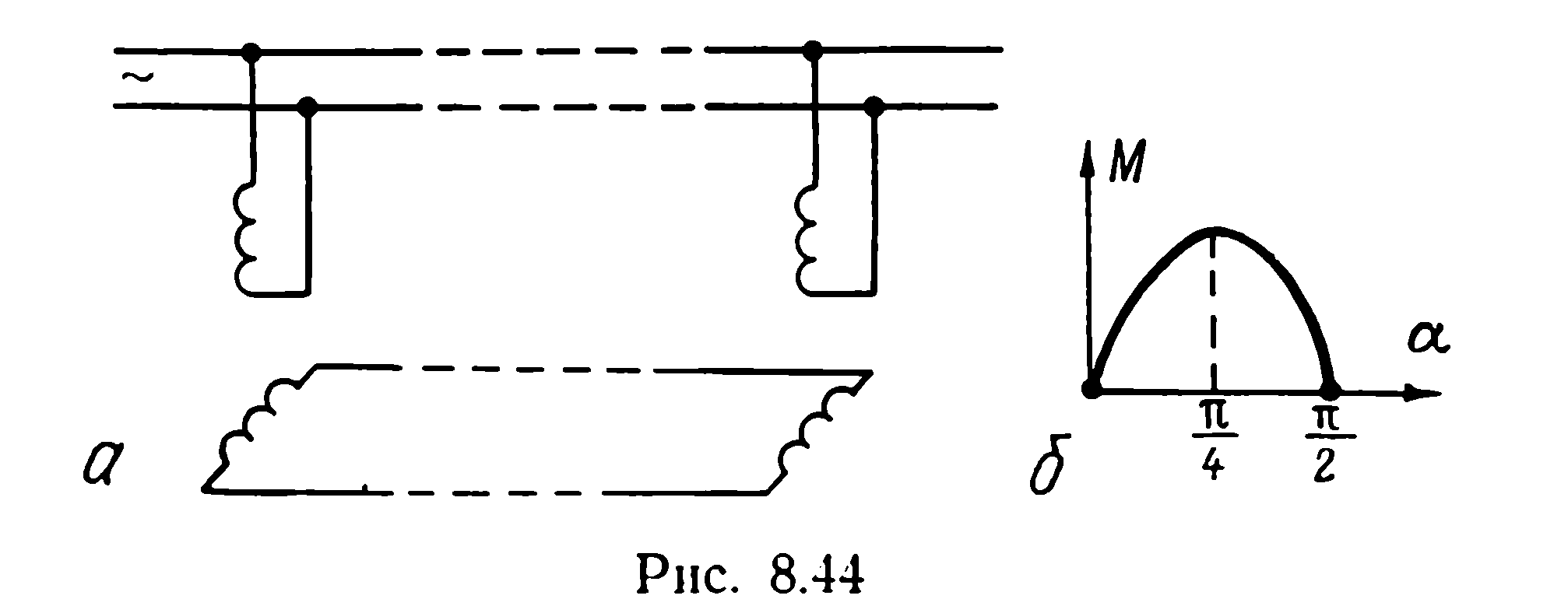
Принцип действия этих датчиков можно пояснить таким образом. Пусть даны два вращающихся трансформатора (ВТ) — два асинхронных двигателя с заторможенными роторами, первичные обмотки которых (статоры) одинаково включены в сеть, а вторичные (роторы) включены встречно (рис. 8.44, а). Если оба ВТ одинаковы и роторы их находятся под одинаковыми углами по отношению к полю первичных обмоток (статоров), то э. д. с. вторичных обмоток (роторов) будут одинаковы и благодаря встречному соединению обмоток результирующая э. д. с. вторичной цепи (роторов) будет равна нулю.
Если ротор одного из ВТ (датчик) повернуть на некоторый угол рассогласования а и принудительно задержать в новом положении, то э. д. с. ротора (датчика) получит новое значение по отношению к исходному и э. д. с. датчика обусловит ток в цепи роторов. Взаимодействуя с полями статоров, ток создает вращающие моменты, которые будут стремиться повернуть роторы. Но ротор датчика заторможен, поэтому ротор второго ВТ (приемника) должен поворачиваться до тех пор, пока не займет такого же пространственного положения по отношению к своему статору, как и ротор первого ВТ — датчика. После этого э. д. с. роторов станут равными, тока в их цепи не будет, и моменты исчезнут.
Таким образом ротор приемника будет следовать за ротором датчика, отставая от него на некоторый угол, определяемый моментом сопротивления движению приемника.
Максимальный синхронизирующий момент Мс,ШХр =<р(а) представлен на рис. 8.44, б. В этой системе (рис. 8.44) недостатком является то, что э. д. с., индуктируемая в роторах, зависит от пространственного положения их. В результате этого при одинаковых углах рассогласования моменты будут различны при различном расположении роторов относительно оси поля. Кроме этого, система устойчива в пределах изменения угла рассогласования до![]() Этих недостатков лишены датчики угловых перемещений, которые называются сельсинами.
Этих недостатков лишены датчики угловых перемещений, которые называются сельсинами.
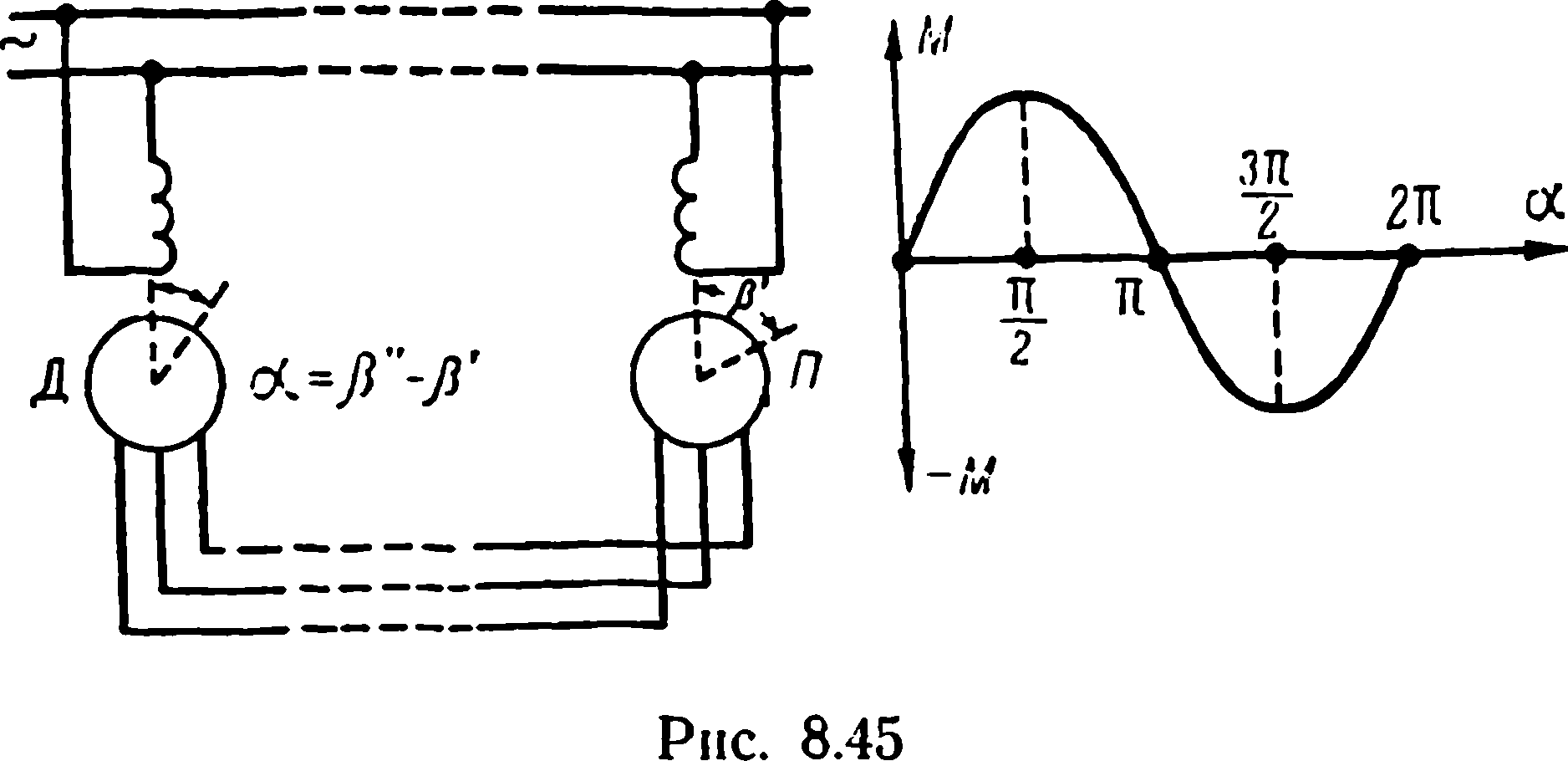
Сельсин. Сельсин представляет собой ВТ, ротор которого имеет не одну, а три обмотки, расположенные друг по отношению к другу со смещением на угол в 120° Поэтому если включить два таких сельсина по схеме рис. 8.45, то суммарный вращающий момент, создаваемый обмотками роторов, не будет зависеть от пространственного расположения этих роторов, а будет зависеть лишь от угла рассогласования а, который для такой системы может изменяться до ±180°, и система будет устойчивой.
Сельсин по конструкции напоминает собой асинхронный двигатель с одной обмоткой на статоре и трехфазным ротором с контактными кольцами (фазный ротор). Наличие контактных колец является недостатком такой конструкции сельсина. Поэтому в настоящее время имеются конструкции бесконтактных сельсинов.
Бесконтактный сельсин (рис. 8.46, а). На статоре 1 размещены вторичные обмотки 6. С торцов установлены две плоские катушки 4, соединенные согласно и подключенные к источнику питания. Ротор состоит из двух башмаков 2, выполненных из ферромагнитного материала и разделенных немагнитной прокладкой 7, вал также сделан из немагнитного материала.

Поэтому поток замыкается так, как показано на рис. 8.46, б. При повороте ротора меняется положение башмаков относительно вторичных обмоток статора, а следовательно, изменяются величины э. д. с., индуктируемых в них. На рисунке цифрой 3 обозначены наборные тороиды, а цифрой 5 магнитопроводящие сегменты, которые способствуют уменьшению магнитного сопротивления.
Магнесин (рис. 8.47) служит для передачи угловых перемещений при повышенных частотах. Он состоит из тороидального пермалоевого сердечника с равномерно наложенной на него обмоткой, которая имеет две отпайки. Наличие отпаек позволяет разделить обмотку на три равные части. Внутри тороида помещен ротор, представляющий собой постоянный магнит, который может поворачиваться относительно статора. В один полупериод потоки в одной половине складываются, а во второй вычитаются, во второй полупериод наоборот. Система выбрана так, что за период магнитная проницаемость в каждой половине, а значит, и магнитное сопротивление постоянному магнитному потоку меняются дважды. Поэтому постоянный поток пульсирует с двойной частотой по отношению к питающей сети. Это вызывает э. д. с. двойной частоты в обмотке тороида. Если роторы занимают одинаковое пространственное положение относительно статоров, то
э. д. с. двойной частоты в соответствующих частях обмоток равны и благодаря встречному соединению противоположны и в соединительных проводах тока нет.

Когда один ротор смещен относительно другого, то э. д. с. двойной частоты в соответствующих обмотках различны, это вызовет ток в соединительных проводах, который создает момент, способный установить роторы в одинаковое положение. В последнее время разработаны шаговые двигатели, которые обладают очень высокой точностью передачи угловых перемещений, и в этом смысле будущее за ними.
Индукционные датчики угловой скорости и ускорения
Эти датчики представляют собой тахогенераторы постоянного и переменного тока. Так как напряжение на выходе генератора пропорционально угловой частоте ω, то ее можно выделить и тем определить угловую скорость.
Если напряжение пропустить через дифференцирующий контур, то можно получить![]() т. е. угловое ускорение.
т. е. угловое ускорение.