§ 9.4. БЕСКОНТАКТНЫЕ РЕЛЕ
Общие сведения
При автоматизации производственных процессов в самых разнообразных отраслях народного хозяйства для сигнализации, блокировки, автоматического и программного управления в настоящее время наиболее часто применяются устройства дискретного действия, характеризующиеся несколькими состояниями входов и выходов (чаще всего двумя).
Известным примером таких устройств является обычное электромеханическое реле, которое может иметь два состояния входа (наличие или отсутствие напряжения на катушке реле) и два состояния выхода (замкнутое или разомкнутое положение контактов).
Другими устройствами дискретного действия являются бесконтактные переключающие устройства. Они также имеют два состояния входов и выходов, но отличаются от электромеханических реле отсутствием электрических контактов, поэтому их обычно называют бесконтактными устройствами или бесконтактными элементами.
Основным условием успешной автоматизации производства является надежность всех элементов автоматического управления, особенно тех, в которых непрерывно происходит большое число срабатываний (переключений). С этой точки зрения бесконтактные элементы, из которых наиболее надежны магнитные, несомненно превосходят электромеханические реле.
Электромеханические реле имеют ограниченное число срабатываний, следовательно, срок службы их ограничен. Срок службы магнитных бесконтактных элементов, если не будет нарушена их механическая прочность, практически «не ограничен» и не зависит от числа совершенных ими переключений. Магнитные элементы практически «не нуждаются» в уходе, не требуют регулировки и наладки, обладают большим быстродействием. Ввиду этих преимуществ в последние годы появилась тенденция применять бесконтактные магнитные элементы в устройствах автоматического управления.
Бесконтактные реле — аппараты, работающие в релейном режиме без наличия контактов. Такие реле можно создать на базе магнитных усилителей. Выходные величины этих усилителей при определенных условиях могут изменяться скачкообразно.
Релейный режим получается за счет сильной положительной обратной связи. Реле, основанное на магнитных усилителях, называется магнитным реле.
Недостаток этих реле — невозможность полного разрыва цепи после срабатывания. В тех случаях, когда требуется обеспечить такой разрыв, бесконтактные применяются в сочетании с контактным реле.
Всякое магнитное реле характеризуется:
- Максимальной мощностью — полезной мощностью, выделяемой в нагрузке при срабатывании реле.
- Кратностью срабатывания — отношением токов
![]() (9.25)
(9.25)
Коэффициентом возврата kB — отношением тока отпуска ;к -току срабатывания усилителя
![]() (9.26)
(9.26)
- Чувствительностью — минимальной мощностью, необходимой для срабатывания реле и определяемой выражением
![]() (9.27)
(9.27)
где Ry — сопротивление обмотки управления МУ.
- Мощностью срабатывания
![]() (9.28)
(9.28)
которая связана с коэффициентом возврата
 (9.29)
(9.29)
- Коэффициентом усиления по мощности магнитного усилителя в релейном режиме
![]() (9.30)
(9.30)
- Временем срабатывания, т. е. временем, необходимым для нарастания тока нагрузки до 95% от установившегося значения.
Получение релейной характеристики магнитного усилителя
При определенном выборе параметров контура обратной связи характеристика «вход—выход» МУ может приобрести петлеобразную форму. Принципиальная схема магнитного усилителя с внешней обратной связью приведена на рис. 9.16.
Через обмотку обратной связи W0.с проходит выпрямленный переменный ток МУ /0.с. Здесь вся или часть выходной мощности МУ как бы снова поступает на его вход, производя дополнительное подмагничивание сердечника. Таким образом, на подмагничивание расходуется часть энергии от источника переменного тока, который, как правило, обладает большей мощностью, чем источник входного сигнала. Обмотка управления получает дополнительную функцию — регулирования степени подмагничивания со стороны обмотки обратной связи.
Считается, что обратный ток вентилей на схеме рис. 9.16 равен 0, тогда для «идеального» МУ при согласном включении обмотки управления и обмотки![]() обратной связи можно записать
обратной связи можно записать
Здесь /р — переменный ток, протекающий по рабочей катушке WПри отсутствии обратного тока вентилей /0.с=/р:

Коэффициент усиления по току для «идеального» МУ равен отношению токов рабочей обмотки и обмотки управления

где![]() —коэффициент обратной связи;
—коэффициент обратной связи;
![]() (9.31)
(9.31)
Из полученного выражения видно, что при наличии обратной связи коэффициент усиления по току для МУ возрастает
в![]() раз, так как для МУ без обратной связи он равен
раз, так как для МУ без обратной связи он равен
![]()
Этот результат получается при совпадении постоянных полей обмоток управления и обратной связи, т. е. при их согласном включении. Такой вид обратной связи называется положительной обратной связью и обеспечивает высокий коэффициент усиления.
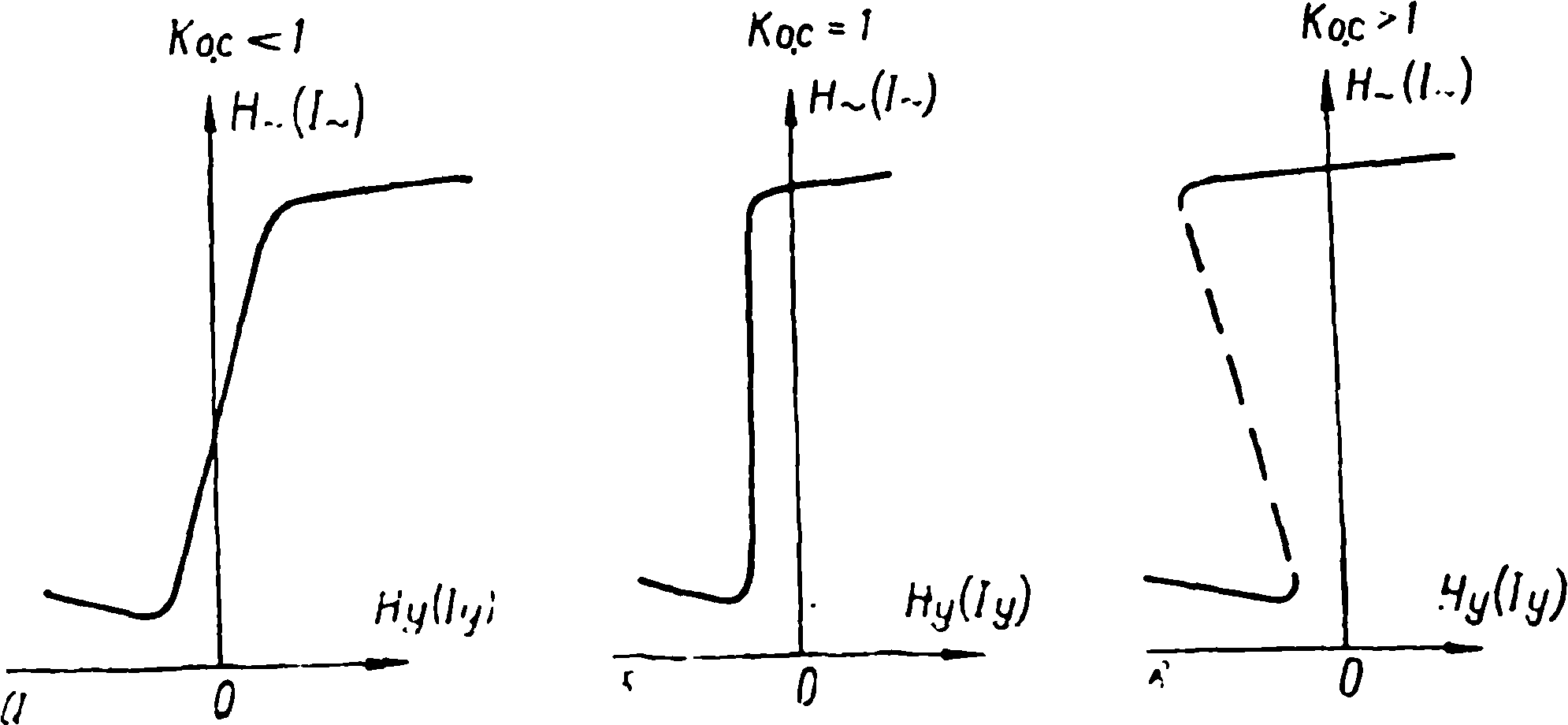
Рис. 9.35
Анализируя выражение коэффициента усиления по току (9.31), приходим к такому выводу.
При /г0.с<1; £ι>1 имеет место недокомпенсированная обратная связь (рис. 9.35, а).
При &0.с=1; kr+oo имеет место компенсированная обратная связь (рис. 9.35, б).
При А0.с>1 £ι<0 будет перекомпенсированная обратная связь (рис. 9.35, в). Здесь кривая /=/(/у) на некотором участке имеет отрицательную кривизну (показано пунктиром). Этот участок соответствует «релейному режиму» магнитного усилителя.
Рассмотрим случай перекомпенсированной обратной связи более подробно на примере тороидного магнитного усилителя типа ТУМ-А5-11, собранного по схеме с самонасыгцением (МУС) (см. рис. 9.17).
При наличии внутренней обратной связи, как показано на рис. 9.36, график зависимости тока нагрузки от тока управления тороидного магнитного усилителя (ТУМ) без внешней обратной связи имеет вид кривой #^=/(#у). Построим характеристику магнитного усилителя, отложив по оси ординат напряженность переменного поля![]() , где /-------- средняя длина силовой линии, по оси абсцисс — напряженность постоянного поля
, где /-------- средняя длина силовой линии, по оси абсцисс — напряженность постоянного поля ![]() а также характеристику обратной связи
а также характеристику обратной связи
![]() которая представляет собой прямую линию, так как ток обратной связи есть выпрямленный переменный ток.
которая представляет собой прямую линию, так как ток обратной связи есть выпрямленный переменный ток.
При действии тока сердечник подмагничивается суммарной напряженностью постоянного магнитного поля. Подсчитав
![]() откладываем ее на оси абсцисс вправо или влево от начала координат в зависимости от того, будет ли поле управляющего тока согласно или встречно полю обмотки обратной связи. Из полученной точки на оси абсцисс проводим луч, параллельный характеристике обратной связи (рис. 9.36). Этот луч пересекает кривую Нв трех точках а, Ь и с, средняя из которых соответствует участку с отрицательной крутизной на характеристике H^=f(Hу) (рис. 9.35, в). В результате получаем характеристику H^=f(Hy) (рис. 9.37), которая построена по характеристикам рис. 9.36 при различных значениях Ну.
откладываем ее на оси абсцисс вправо или влево от начала координат в зависимости от того, будет ли поле управляющего тока согласно или встречно полю обмотки обратной связи. Из полученной точки на оси абсцисс проводим луч, параллельный характеристике обратной связи (рис. 9.36). Этот луч пересекает кривую Нв трех точках а, Ь и с, средняя из которых соответствует участку с отрицательной крутизной на характеристике H^=f(Hу) (рис. 9.35, в). В результате получаем характеристику H^=f(Hy) (рис. 9.37), которая построена по характеристикам рис. 9.36 при различных значениях Ну.
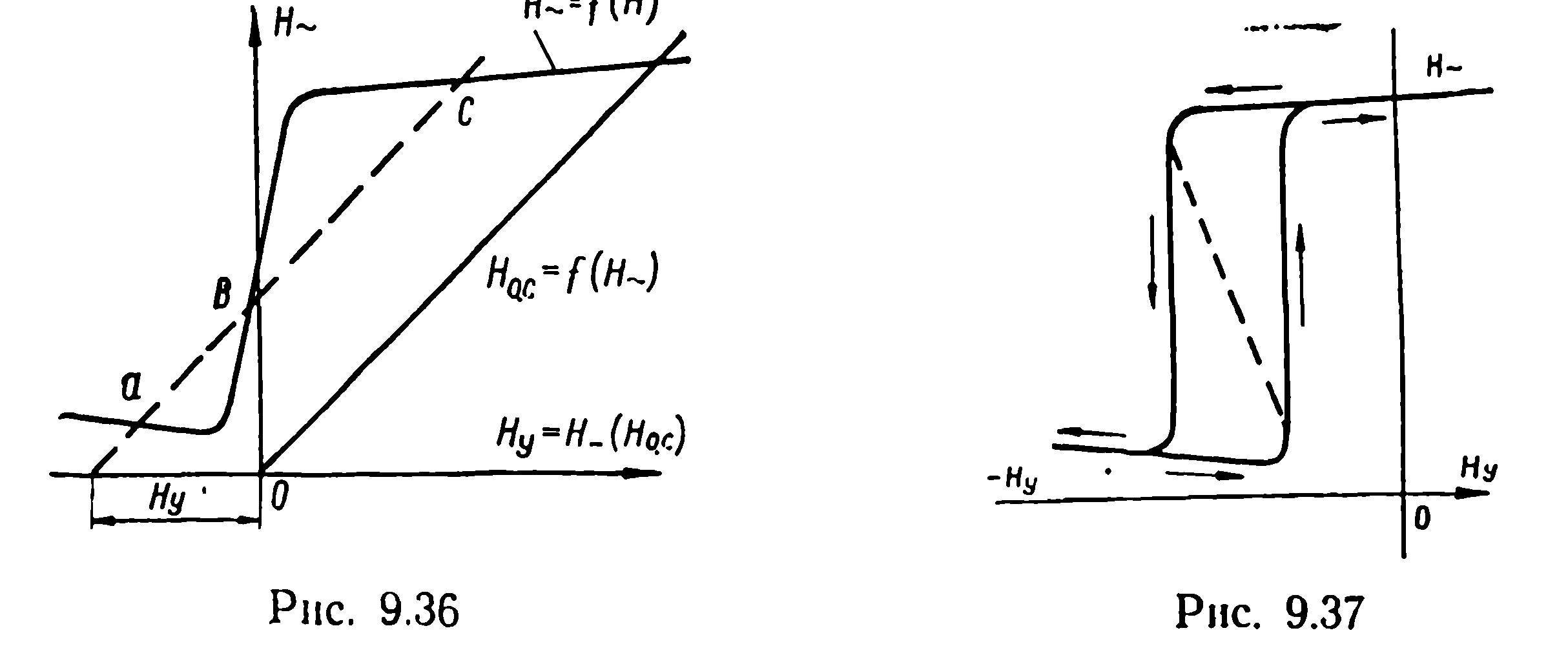
На участке характеристики, где она имеет отрицательную кривизну, работа магнитного усилителя становится неустойчивой (рис. 9.37). В действительности получаются скачки, направление которых в зависимости от изменения Ну показано стрелками. Так получается релейная характеристика МУ