§ 9.3. МАГНИТНЫЕ УСИЛИТЕЛИ
Общие сведения
Магнитный усилитель представляет собой бесконтактный статический аппарат автоматического действия. Магнитные усилители бывают однотактными или нереверсивными и двухтактными или реверсивными. Принцип действия магнитных усилителей основан на использовании нелинейных свойств стали. Если электрическую цепь со сталью переменного тока подмагничивать постоянным током, то можно управлять относительной магнитной проницаемостью стали μ,· и она будет уменьшаться так, как это изображено на рис. 9.11 для трансформаторной стали при частоте 50 гц (а — при синусоидальной индукции, б — при синусоидальном токе). Это и объясняет принцип действия магнитного усилителя. При уменьшении μΓ будет уменьшаться индуктивное сопротивление катушки переменного тока, а это при неизменности величины сопротивления нагрузки и напряжения сети, от которого питается катушка, приведет к увеличению тока в цепи.
Для пояснения этого утверждения рассмотрим схему рис. 9.11, в (дроссель с подмагничиванием). Если считать сопротивление обмотки W^ чисто индуктивным, то ток холостого хода схемы рис. 9.11,в, т. е. ток нагрузки /„ при токе управления, равном нулю (/„ = 0), будет:
![]()
где Rn — сопротивление нагрузки;
х — индуктивное сопротивление обмотки переменного тока, равное
![]()
и x=k\x,r, т. е. λ' пропорционален относительной магнитной проницаемости μ,.

Если /у=0, то μΓ равна максимуму, х равен максимуму и ток нагрузки /,,=/х.х равен минимуму (рис. 9.11, г). В этом случае индукция переменного магнитного поля Bmi будет максимальной {рис. 9.11, а, б и (?) и э. д. с. самоиндукции обмотки W^ будет максимальной, а ток в цепи минимальным.
При включении обмотки управления под напряжение и появлении в ней постоянного тока начнет уменьшаться μΓ, а вместе с ней индукция Вт, а значит, и х, а ток в цепи возрастет (рис. 9.11, а, б, г, д).
Если проследить процесс подмагничивания точки /, 2 и 3 на рис. 9.11, а и б, то можно видеть, что ток нагрузки изменяется от
![]()
Это и будет эффект усиления, это и поясняет принцип действия магнитного усилителя.
Расстроенный магнитный усилитель рис. 9.11, в не получил распространения, так как при такой конструкции необходимо включать в обмотку управления большую индуктивность, чтобы уменьшить переменный ток, наводимый в обмотке управления, а это приводит к ухудшению параметров магнитного усилителя. Поэтому в настоящее время получили распространение другие схемы магнитных усилителей, которые лишены недостатков магнитного усилителя, приведенного на рис. 9.11, в.
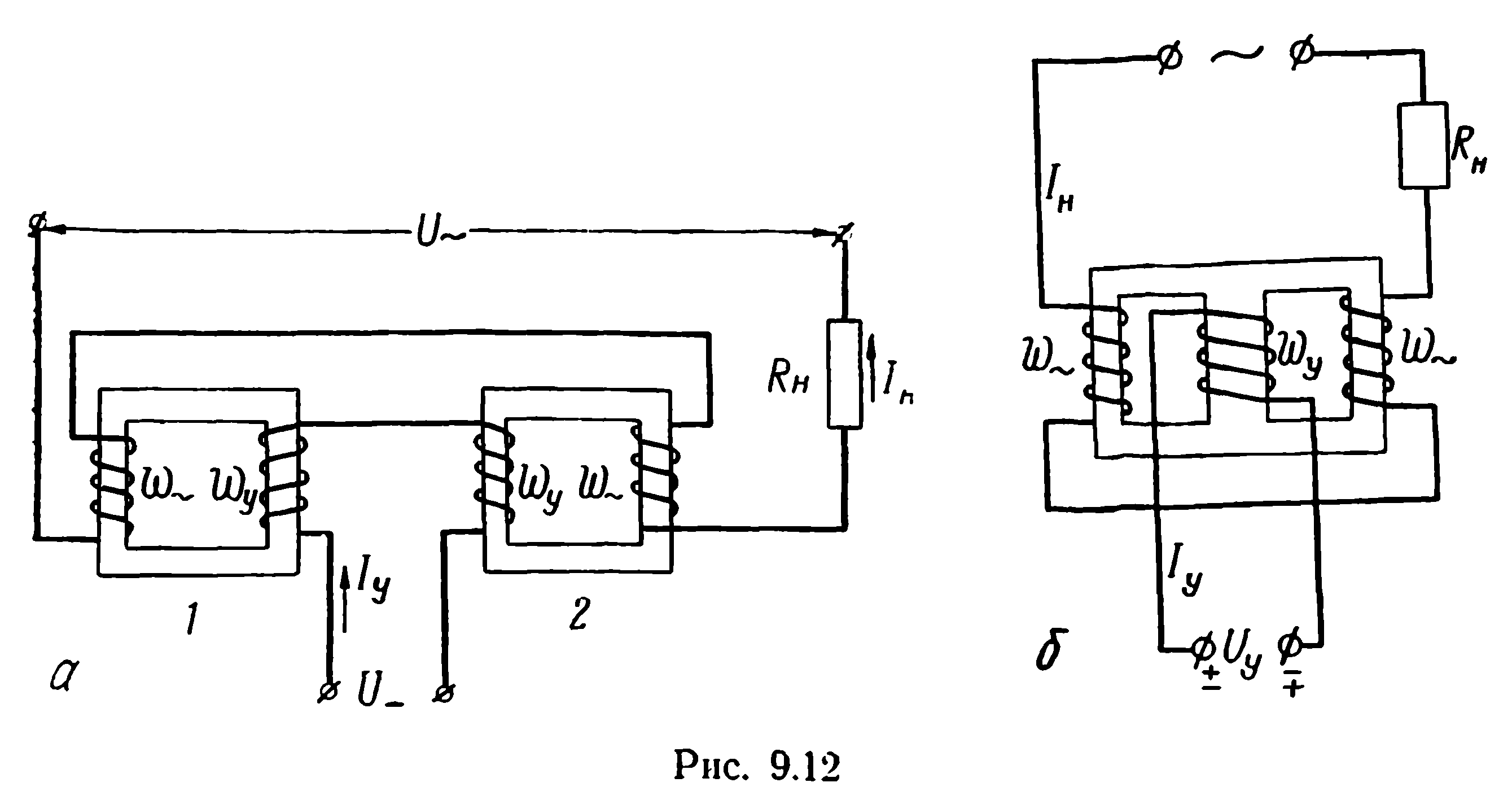
Схемы таких простейших магнитных усилителей приведены на рис. 9.12, а и б. Такой магнитный усилитель состоит из двух одинаковых сердечников или одного Ш-обрззного, на которые наложены две обмотки. Первая обмотка называется рабочей обмоткой W~~ и состоит из двух половин, расположенных на разных сердечниках, а вторая — обмоткой управления Wy. Если включить рабочую обмотку вместе с нагрузкой под напряжение сети, то ток в цепи будет
![]() (9.1)
(9.1)
где х — сопротивление одной половины рабочей обмотки;
RH — сопротивление нагрузки.
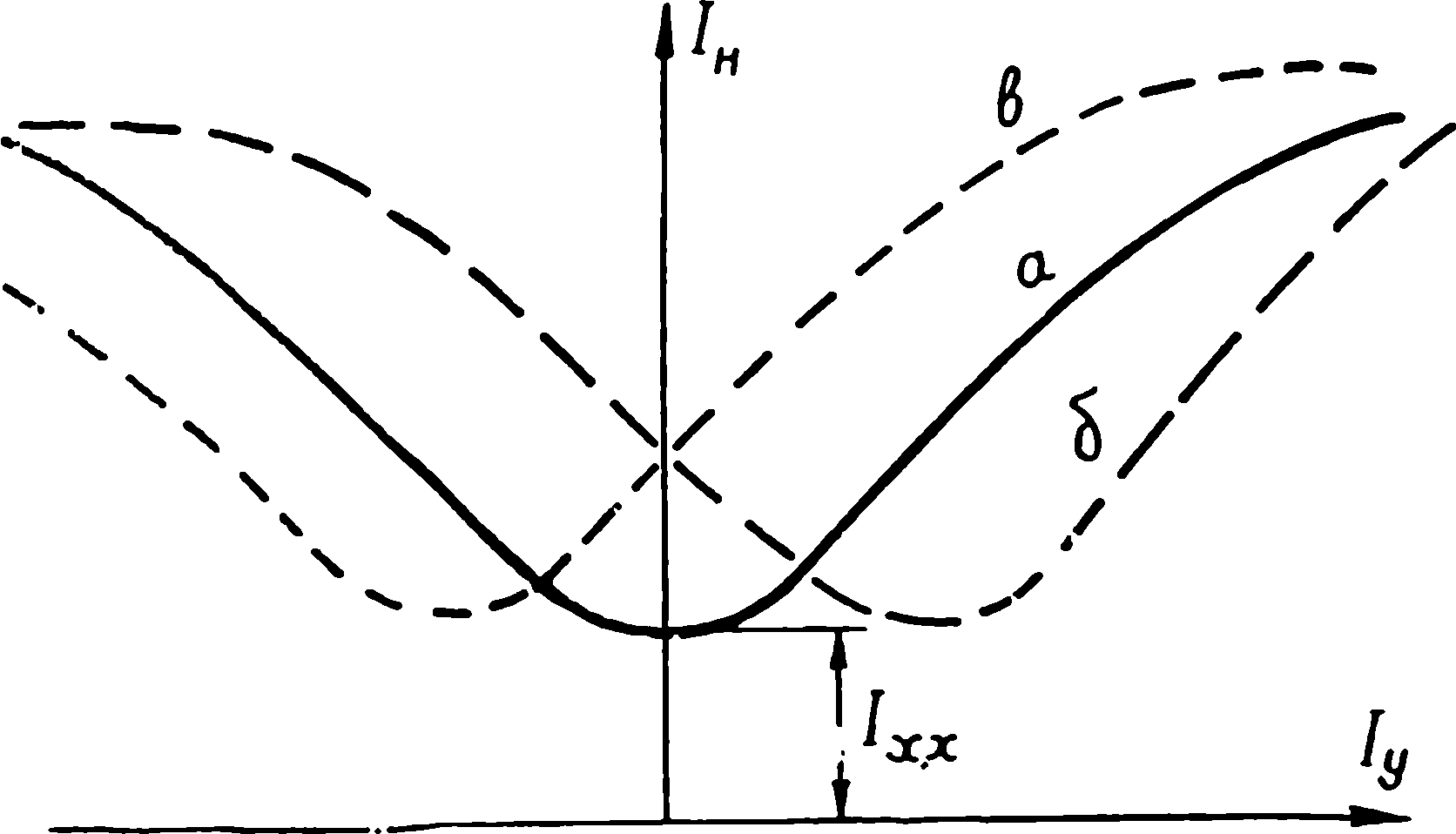
Рис. 9.13
Если подать в обмотку управления постоянный (выпрямленный) ток, т. е. начать подмагничивать магнитную цепь, то х будет стремиться к 0. Принимая z^x=0, получим
![]() (9.2)
(9.2)
Из формул (9.1) и (9.2) следует, что ток в нагрузке изменяется от /х.х до /макс. Процесс этот совершается бесконтактно и автоматически.
Для магнитного усилителя (рис. 9.12, а и б) можно построить характеристику «вход — выход», которая дает зависимость между током управления и током нагрузки /ц=<р(/у) (рис. 9.13, кривая а), где /у — вход, /и — выход. Отсюда следует, что полярность тока управления не оказывает влияния на величину тока нагрузки, т. е. такой магнитный усилитель неполярен. Для того чтобы избежать протекания переменного тока в обмотках управления (рис. 9.12, а, б), эти рабочие обмотки должны быть соединены так, чтобы наводимые в обмотках управления переменные э. д. с. первой гармоники взаимно компенсировались. В этом
случае в один полупериод напряженности потоки, создаваемые обмотками Wy и будут складываться в первом дросселе и вычитаться во втором, а в следующий полупериод картина будет обратной. При последовательном соединении обмоток управления (рис. 9.12, а и б) нечетные гармоники э. д. с. взаимно уравновешиваются, четные гармоники не уравновешиваются и присутствуют в обмотках управления.

Но амплитуды четных гармоник значительно меньше амплитуды первой гармоники. Если рабочие обмотки соединить параллельно, то можно полностью скомпенсировать высшие гармонические четного порядка в обмотках управления. Однако в этом случае рабочие обмотки образуют коротко- замкнутый контур на пути постоянной составляющей потока, а это повысит инерционность магнитного усилителя, что может оказаться неприемлемым в ряде схем.
Для схемы магнитного усилителя (рис. 9.12,6), собранной на трехстержневом Ш-образном сердечнике, рабочие обмотки располагаются на крайних стержнях, а обмотка управления — на среднем стержне. Рабочие обмотки должны быть соединены так, чтобы магнитный поток не заходил в средний стержень, что исключает наведение э. д. с. первой гармоники в обмотке управления, т. е. они должны быть соединены согласно, тогда переменный магнитный поток (первая гармоника) не будет заходить в средний стержень, а значит, не будет наводиться переменная э. д. с. в обмотке управления.
«Идеальный» магнитный усилитель. При анализе работы и физических процессов, протекающих в магнитном усилителе, очень часто исходят из представлений об идеальном магнитном усилителе, который не имеет потерь и рассеяния магнитных потоков. Кроме этого, считают, что кривая намагничивания сердечника «идеального» магнитного усилителя изображается двумя прямыми ΟΒι и BiC (рис. 9.14, а), что позволяет более рельефно выявить свойства магнитного усилителя.
На рис. 9.14, а первая часть кривой ΟΒι совпадает с осью ординат и соответствует бесконечно большим значениям магнитной проницаемости. Вторая часть кривой BiC имеет небольшой наклон относительно оси Н. Характеристика «вход — выход» для идеального магнитного усилителя представлена на рис. 9.14,6. Если сравнить характеристику реального (рис. 9.13, кривая а) и идеального магнитного усилителя (рис. 9.14,6), то можно увидеть, что первая при токе управления, равном 0, имеет значение тока нагрузки, равного /х.х, который называется током холостого хода магнитного усилителя. Для идеального магнитного усилителя ток холостого хода равен 0. Характеристика идеального магнитного усилителя имеет прямолинейные участки, а реального — криволинейные.
Для идеального МУ, подмагничиваемого постоянным током, характерно равенство м. д. с.
![]() (9.3)
(9.3)
где I^ — эффективное значение переменного тока;
W^ — число витков рабочей обмотки;
/у — ток обмотки управления;
Wy — число витков обмотки управления.
Электрические аппараты автоматического управления - Магнитные усилители
Содержание материала
Страница 33 из 50