Устройство и принцип работы.
Конструкция синхронного двигателя аналогична конструкции синхронного генератора. Ротор обычно явнополюсной. На роторе, в его полюсных башмаках обязательно укрепляют пусковую обмотку, она подобна успокоительной обмотке генератора. Для улучшения пусковых характеристик воздушный зазор в двигателях делают несколько меньше зазора в генераторе.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного потока статора с магнитным потоком ротора (индуктора). При протекании трехфазного тока по трехфазной обмотке статора образуется вращающееся магнитное поле. Скорость вращения его при заданной частоте тока для данного двигателя величина постоянная. Магнитное поле статора жестко сцепляется с магнитным полем ротора; северный полюс статора будет против южного полюса ротора и увлечет в своем вращении ротор двигателя. Ротор двигателя вращается с постоянной скоростью независимо от величины нагрузки.
В синхронном генераторе магнитное поле статора следует за магнитным полем ротора, то есть в этом процессе ведущий — ротор. Поле статора — ведомое. Ось магнитного потока ротора в генераторе в пространстве опережает ось магнитного потока статора. Этот угол опережения увеличивается с ростом активной нагрузки генератора. В синхронном двигателе магнитное поле ротора следует за магнитным полем статора. Здесь поле статора ведущее, а ротор ведомый. В двигателе ось магнитного потока ротора в пространстве при своем вращении отстает от оси магнитного потока статора. Этот угол отставания возрастает с увеличением нагрузки двигателя (тормозного момента на валу).
В синхронных машинах угол раствора осей магнитного потока ротора и статора может увеличиться до 90°, при больших углах машина выпадает из синхронизма. В этом случае скорость ее уже не постоянная, она потребляет очень большой ток. защита должна быстро отключить двигатель от сети.
Синхронные двигатели характеризуются перегрузочной способностью, то есть отношением максимального момента к номинальному. Величина момента синхронных двигателей в отличие от асинхронных зависит от величины питающего напряжения в первой степени, то есть уменьшения напряжения, например вдвое, сопровождается уменьшением и максимального момента вдвое. Перегрузочная способность синхронного двигателя очень существенно зависит от тока возбуждения. С уменьшением тока возбуждения уменьшается максимальный момент двигателя, а угол раствора осей потоков увеличивается. При некотором, предельно наименьшем токе возбуждения максимальный момент двигателя будет равен тормозному моменту, а угол раствора — 90. Дальнейшее уменьшение тока возбуждения приведет к тому, что максимальный момент двигателя будет меньше тормозного, двигатель выпадет из синхронизма.
Коэффициент мощности синхронного двигателя может принимать разные значения в зависимости от тока возбуждения.
Коэффициент мощности и ток статора в синхронном двигателе регулируют изменением тока возбуждения. Если в асинхронных двигателях при постоянном напряжении, частоте и моменте сопротивления ток статора и коэффициент мощности вполне определенные величины, то в синхронных двигателях эти величины при тех же условиях можно изменить в широких пределах.
Можно ток возбуждения отрегулировать так, чтобы cos φ двигателя стал равным единице. Такой двигатель называют нормально возбужденным. При уменьшении тока возбуждения cos φ уменьшается, реактивную мощность двигатель потребляет из сети, которая и идет на покрытие недостатка собственного возбуждения.
Если ток возбуждения увеличивать ст значения, соответствующего нормальному возбуждению, cos φ уменьшается. В этом случае реактивная мощность отдается двигателем в сеть вследствие избытка возбуждения.
Возможность регулирования коэффициента мощности наряду с постоянством скорости вращения — важное качество синхронного двигателя в сравнении с асинхронным. При любой нагрузке синхронного двигателя сравнительно просто получить cos φ = 1, а при большем токе возбуждения он будет отдавать реактивную мощность в сеть, которую потребляют асинхронные двигатели и трансформаторы.
Ток статора синхронного двигателя в зависимости от тока возбуждения определяют (U-образной характеристикой.
U-образная характеристика представляет зависимость тока двигателя от тока возбуждения при постоянных величинах: напряжении, частоте и моменте нагрузки на валу.
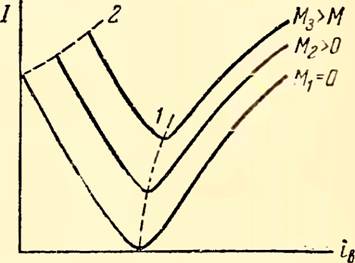
Рис. 52/ U-образные характеристики синхронного двигателя:
1 — регулировочная характеристика при cos φ = L; 2 — линия статической устойчивости.
На рисунке 52 представлены (U-образные характеристики синхронного двигателя при трех значениях момента. Каждая U-образная характеристика имеет низшую точку, которая соответствует нормальному возбуждению двигателя, то есть здесь cos φ = 1. Ордината низшей точки U-образной характеристики представляет активную составляющую тока статора при данном моменте двигателя. Левая ветвь характеристики соответствует недовозбужденному режиму двигателя, когда он работает с отстающим током при потреблении реактивной мощности из сети. Правая ветвь характеристики соответствует режиму перевозбуждения двигателя, когда он работает с опережающим током при отдаче реактивной мощности в сеть.
Чем больше момент двигателя, тем выше U-образная характеристика и тем правее будет низшая ее точка. Кривая 1, соединяющая разгружена от реактивной мощности, cos φ станет близким к единице, пропускная способность линии увеличится.
С помощью компенсатора можно регулировать напряжение в конце линии передачи. Если напряжение в конце линии уменьшится, то перевозбуждением компенсатора можно напряжение довести до номинального. В случае повышения напряжения в конце линии свыше номинального, что может быть при малой нагрузке, недовозбуждением компенсатора можно снизить напряжение до требуемого уровня. Синхронный компенсатор даже при постоянном токе возбуждения способен в некоторой мере стабилизировать напряжение линии.
Синхронные компенсаторы — это крупные электрические машины мощностью в тысячи и десятки тысяч киловольт-ампер. Включают в сеть синхронные компенсаторы по методу асинхронного пуска синхронных двигателей. Очень крупные компенсаторы пускают разгонным двигателем.