9-13. Магнитофуги
Во многих машинах рабочие органы не вращаются, а ходят взад-вперед. Можно посадить па вал двигателя кривошип или эксцентрик, сцепить с ними шатун и таким путем превратить вращение двигателя в возвратно- поступательное движение.
Так работают лесопильные рамы, поперечно-строгальные станки (шепинги) и многие другие машины.
Но можно и сам электродвигатель выполнить так, чтобы его якорь не вращался, а двигался взад-вперед. Такие моторы называются магнитофугами (от латинского слова fugare — бежать); в них электромагнитное поле развернутого в плоскость статора бежит то в одну, то в другую сторону и тащит за собой якорь.
Так строятся отбойные молотки. Существуют проекты магнитофугальных насосов для откачки нефти из глубоких скважин.
9-14. Электромагнитные пушки
Множество изобретателей мечтало использовать магнитофугальный принцип для создания сверхдальнобойных бесшумных электрических орудий.
Такое орудие вполне осуществимо, но оно будет значительно хуже решать практические задачи, чем обычные пушки.
Чтобы метнуть с большой начальной скоростью тяжелый снаряд, нужна, хоть и кратковременно, очень большая мощность. Магнитофугальное электрическое орудие получается очень громоздким и тяжелым.
9-15. Дуговые двигатели
Промежуточной конструкцией между магнитофугами и моторами с классически круглым статором является электропривод с дуговым статором. Такие двигатели применяются иногда для привода шаровых мельниц, некоторых текстильных машин.
В современной технике все более отчетливо проводится тенденция встраивать электродвигатели в те станки, которые они приводят в действие, так чтобы двигатель органически сливался со всей остальной конструкцией. Иногда ротор двигателя одновременно является и рабочим органом. Например, в рольгангах, предназначенных для транспортировки различных изделий, применяются двигатели, у которых ротор помещается снаружи, причем внешняя его поверхность является рабочей поверхностью ролика, а статор, наоборот, помещается внутри.
Существуют тысячи вариантов и разновидностей конструкций и схем включения различных электродвигателей.
9-16. Двойное вращение
Заслуживают упоминания двигатели двойного вращения или биротативные двигатели, как их иногда называют.
Во всех электродвигателях магнитные линии, проходящие между статором и ротором, вызывают равные механические усилия и на статоре, и на роторе. Следовательно, если статор не закреплять, оставить его свободным, то он тоже начнет вращаться в сторону, противоположную вращению ротора. Собственно, в таких двигателях уже нельзя говорить о статоре и роторе: в них все крутится, у них два — внешний и внутренний — ротора, вращающихся в противоположные стороны. При одном и том же весе и одной и той же абсолютной окружной скорости от этих двигателей можно получить в два раза большую работу.
Двигатели двойного вращения применяются в аккумуляторных торпедах. Здесь требуется кратковременная работа, и такие двигатели можно сделать очень легкими.
9-17. Следящие системы
Существует много случаев, когда необходима большая точность в передаче механического движения. Например, на кораблях показания главного компаса должны быть переданы без всяких ошибок и искажений в разные места. Для такой передачи применяются электродвигатели, включаемые по схеме синхронной или синхронно-следящей передачи.
На боевом корабле наводчики устремляют на неприятеля острый взгляд дальномерных труб. Их задача — только удержать противника на перекрестке паутинных нитей в поле зрения трубы. Дальше вступают в работу электродвигатели. Маленькие электродвигатели приводят в действие счетно-решающие механизмы, которые учитывают расстояние, свой курс, курс противника, скорость свою и противника, вводят поправку на ветер, на плотность воздуха, дают точные данные для стрельбы. Тогда другие, более мощные двигатели придают орудию требуемые поворот и наклон. Двигатель же устанавливает дистанционную трубку на снарядах — и сокрушающий залп уничтожает врага.
9-18. Электрический вал
Много лет применялась в электротехнике такая схема, которую называли «электрический вал» (рис. 9-1).
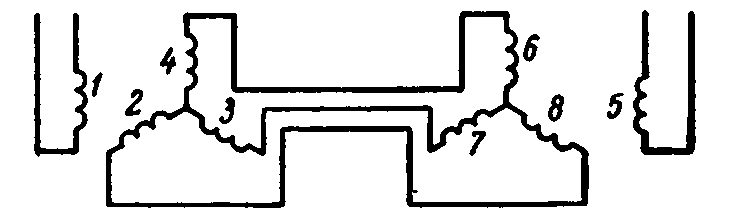
Рис. 9-1.
Обмотка 1 поворачивается между обмотками 2, 3, 4 — тогда обмотка 5 будет поворачиваться между обмотками 6, 7, 8. Такая схема называется еще схемой одновременной или синхронной передачи. Как мы повернем катушку 1, так одновременно с ней — как говорят, синхронно — поворачивается катушка 5. Катушка 1 — это датчик, а катушка 5 — приемник. Катушка 1 — это, например приводимый в действие компас-матка, главный компас, который помещают в самое укромное место. А катушка 5 — это компасы-повторители; их может быть много, они расставлены в самых разных местах корабля. Скажем, катушки 1 связана с поплавком в бензиновом баке, а приемная катушка двигает стрелку указателя уровня. Или катушка датчика двигает вычислительный механизм, а катушка приемника управляет пушкой, которая точно нацеливается на самолет.
В показанной выше схеме какое усилие на приемнике, такое точно чувствуется и на датчике. Если приемник движется с большим трением, то большое усилие должно прилагаться и к датчику.
И вот я нарисовал вместо представленной на рисунке схемы чуть-чуть от нее отличную (рис. 9-2).
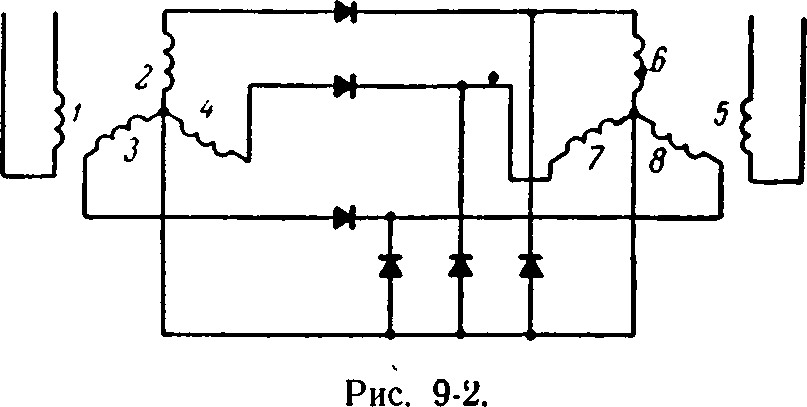
Это тоже синхронная передача: катушка 5 точно следует за катушкой 1, но между этой передачей и представленной на предыдущем рисунке есть большая разница. В этой передаче на валу приемника развивается усилие, во много раз большее, чем на валу датчика.
Добавление вентилей увеличивает усилие в сотни и в тысячи раз. Вал датчика можно крутить одним пальцем, а на приемном валу развивается большая мощность. Конечно, эти силы не берутся из ничего: их поставляет источник переменного тока, который питает датчик. Он из простого посредника превращается теперь в усилитель.