5-6. МЕХАНИЗМ СВОБОДНОГО РАСЦЕПЛЕНИЯ УНИВЕРСАЛЬНЫХ И УСТАНОВОЧНЫХ АВТОМАТОВ
Механизм свободного расцепления создает условия как для неавтоматического, так и для автоматического отключения, после чего контакты под влиянием пружины начинают двигаться в сторону отключения.
Обычно неавтоматическое отключение осуществляется путем расцепления механизма (создание второй степени свободы). Так сделано во всех универсальных автоматах и в ряде установочных. При наличии гибкой связи между приводом и механизмом неавтоматическое отключение осуществляется без расцепления механизма. Это желательно, так как при этом не изнашивается защелка, осуществляющая расцепление (рис. 4-35). Автоматическое отключение, которое всегда происходит при действии расцепителя, осуществляется путем расцепления механизма. Механизм выполняют так, что если расцепитель сработал, то не только должно быть обеспечено отключение (свободное расцепление во включенном состоянии), но и должно быть предотвращено даже временное касание контактов при движении привода в сторону включения (свободное расцепление в любом положении).
Возврат механизма в сцепленное состояние обычно осуществляется переводом рукоятки в положение «отключено». Желательно, чтобы этот возврат происходил автоматически после расцепления. Тогда не потребуется осуществлять специальное движение для взвода механизма перед включением. При этом конструкция электромеханического привода получается проще. Механизм рис. 5-16 имеет автоматический возврат во взведенное положение, а механизм рис. 4-27, 4-28 и 4-29 его не имеет.
В зависимости от того, как создается вторая степень свободы, механизмы свободного расцепления автоматов низкого напряжения в соответствии с классификацией, предложенной С. И. Артоболевским [Л. 5-16], можно разбить на следующие классы.
Первый класс — вторая степень свободы создается полной ликвидацией одной из связей путем расцепления муфты, состоящей из одной или нескольких защелок, и полного отсоединения привода от контактов.
Второй класс — вторая степень свободы создается ломающимися рычагами, когда они из одной детали превращаются в шарнирно связанную пару. В механизмах этого класса ломающиеся рычаги для превращения в одну деталь переходят за мертвое положение.
Третий класс — вторая степень свободы создается вследствие ликвидации какой-либо опоры при расцеплении защелки.
В автоматах низкого напряжения механизмы второго и третьего классов обычно представляют собой замкнутую пятизвенную цепь.
На рис. 5-15,о изображена четырехэвенная цепь (основание и три рычага), имеющая одну степень свободы. Одно из звеньев цепи (один из рычагов 1) представляет собой ломающийся рычаг. Когда он превращается в шарнирно связанную пару, получаются пять звеньев с двумя степенями свободы. Эта пятизвенная цепь может иметь дополнительно присоединенные группы рычагов (рис. 5-15,6), которые в данном случае необходимы для изменения передаточного отношения между контактами и приводом. Механизм первого класса изображен на рис. 5-16. Здесь связь между приводной рукояткой 1 и шипом 2 на рычаге, шарнирно связанном с контактами, осуществляется через связанные между собой рычаги 3, 4 и 5, которые удерживаются во включенном положении защелкой 6. При ударе расцепителя по рычагу 5 связь между приводом и контактами полностью нарушается.
Механизм второго класса см. на рис. 4-27, 4-28 и 4-29, а описание — в § 4-8.
Механизмы третьего класса можно подразделить на две подгруппы.
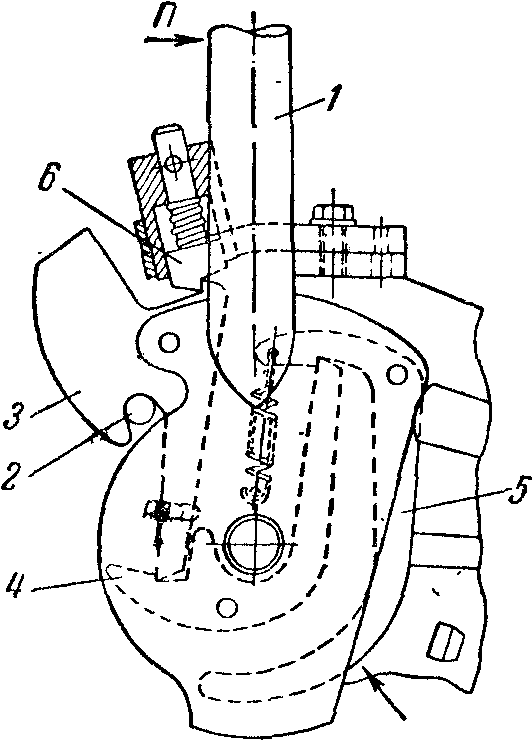
Рис. 5-16. Механизм свободного расцепления автомата АВ15.
В подгруппе А опора, связанная с защелкой и подлежащая ликвидации, находится не в шарнире ломающихся рычагов, и усилие, передаваемое на защелку, в этой подгруппе гораздо определеннее, так как оно не подвержено значительным изменениям из-за изменения угла между ломающимися рычагами. Пример такого исполнения см. на рис. 4-35. В малых автоматах, где не требуется применять дополнительные группы рычагов для
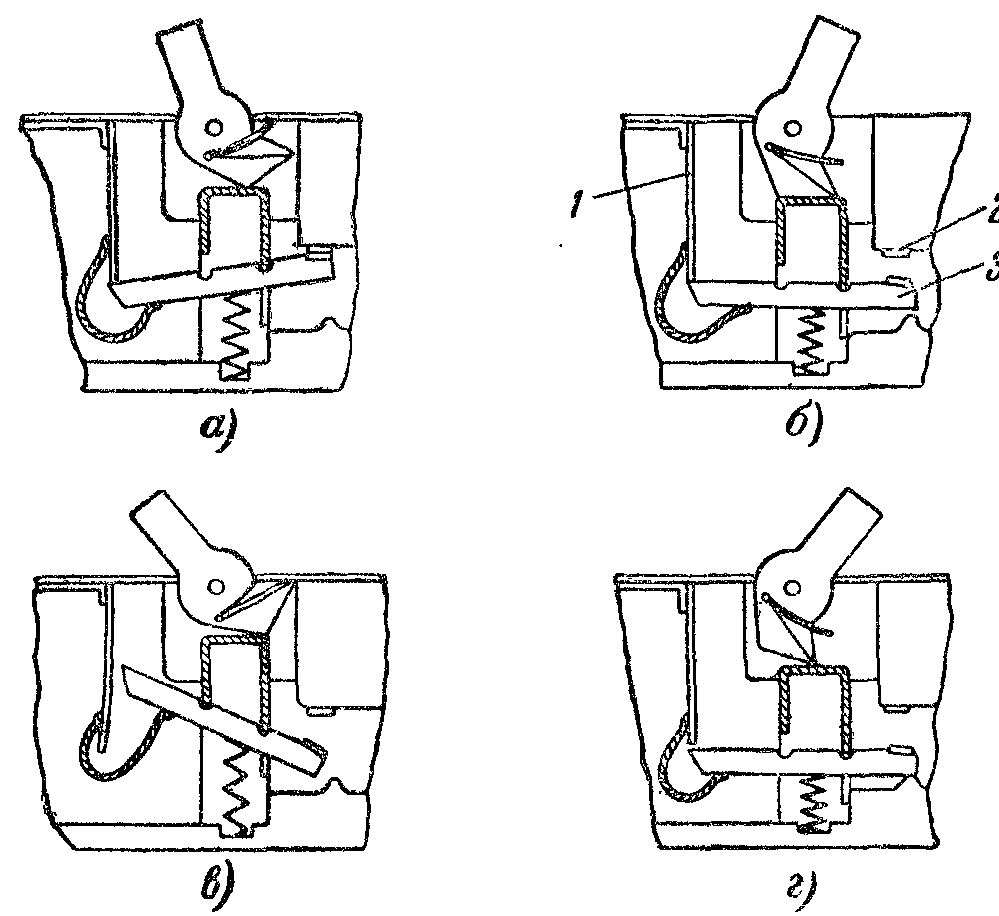
Рис. 5-17. Механизм автомата АБ25 без моментного включения и отключения.
а — включено; б — отключено вручную; в— отключено автоматически; г — готово ко включению (взведено); 1— термобиметаллическая пластинка; 2 — неподвижные контакты; 3 — подвижные контакты.
снижения усилия, потребного для расцепления, механизм подгруппы А можно сделать очень простым (рис. 5-17 и 4-37).
В подгруппе Б имеются ломающиеся рычаги и расцепление происходит вследствие ликвидации опоры в шарнире этих рычагов, не перешедших за мертвое положение (не дошедших до него).
Примеры выполнения разных механизмов см. (Л. 5-17 и 5-18]. Успешность применения механизмов, основанных на тех или иных принципах, зависит от общей компоновки конструкции, а также от отработки деталей. В настоящее время трудно дать однозначное указание, какой механизм в каких случаях следует применять. Вообще механизмы третьего класса наиболее рациональны. Защелки там неподвижны, поэтому имеется меньшая опасность ложного срабатывания их от удара при включении аппарата. Защелки можно делать более чувствительными. Кроме того, при неподвижных защелках имеется больше возможностей в выборе их конструкции и можно не так считаться с их весом, как в случае подвижных защелок. В конструкциях механизмов третьего класса гораздо легче получить малое усилие, требуемое для расцепления, чем в конструкциях второго и первого классов. Недостаток конструкций первого класса заключается в том, что надо с помощью защелок разъединять детали с трением скольжения при относительно больших усилиях, что приводит к существенному износу. Недостаток конструкций второго класса заключается в возможности существенного изменения усилий, требующихся для излома ломающихся рычагов, при износе и уменьшении угла между ними. Кроме того, ломающиеся рычаги могут изломаться при ударах.
Все указанные выше соображения (в особенности об ударостойкости и снижении усилия расцепления) имеют значение главным образом для больших автоматов, и там конструкции третьего класса имеют бесспорное преимущество. Для малых автоматов конструкции механизмов первого и второго классов могут быть вполне удовлетворительными и конструктивно более просто осуществимыми. Особенно широко применяются в малых автоматах механизмы второго класса.
В механизмах всех классов расцепитель обычно действует непосредственно на защелку, которая связана с основными рычагами механизма свободного расцепления непосредственно или через добавочные группы рычагов, служащие для снижения усилия, потребного для расцепления. Расцепитель может действовать и непосредственно на ломающиеся рычаги.
Коэффициент трения в защелках можно принимать меняющимся от нуля (при хорошей смазке и наличии вибрации) до 0,3 — 0,4. В зависимости от направления перпендикуляра к площадке касания обеих деталей за- щелки усилие от механизма может создавать в запирающей детали защелки момент вращения, равный нулю либо направленный как согласно с силой расцепления Р (рис. 6-18), так и против этой силы. Таким образом, можно менять требующуюся силу расцепления. При коэффициенте трения, равном нулю, момент равен нулю, если перпендикуляр к площадке касания проходит через центр вращения запирающей детали. Такая защелка называется мертвой.
Хорошая защелка должна иметь малое и стабильное усилие расцепления. В некоторых случаях (например, для тепловых расцепителей) требуется, чтобы защелка срабатывала точно (в определенном положении) и имела малый ход расцепления. В других случаях (например, для электромагнитных расцепителей) точность срабатывания неважна, но желательно иметь большой ход до расцепления для придания ударостойкости.
Нестабильность усилия расцепления Р определяется тремя факторами: нестабильностью коэффициента трения, изменением усилия М и направления соприкасающихся поверхностей из-за износа. Для стабильности надо, чтобы вращающий момент, создаваемый силой М, в запирающей детали был мал по сравнению с вращающимся моментом, который возвращает защелку в замкнутое положение. Это имеет место в мертвых защелках. Хотя в целях снижения усилия расцепления и применяются защелки, в которых сила М при нулевом коэффициенте трения способствует отключению, однако при этом всегда создается опасность ложного срабатывания и желательно этого избегать.
Защелки с трением качения (типы а, б, в, рис. 6-18) имеют меньшее усилие расцепления Р и более стабильны, чем защелки с трением скольжения (типы г, д, е), так как у них мало трение и невелик износ поверхности касания. Защелки типов а, в, г, е можно сделать мертвыми на всем пути хода расцепления. Величину хода можно сделать поэтому большой. При данной энергии, затрачиваемой на расцепление, ход можно дать больший у защелок типов а ив. Благодаря большому ходу до расцепления у мертвых защелок легче получить достаточную ударостойкость, чем в случае ломающихся рычагов, где ход до расцепления ограничен. Мертвые защелки с роликами широко применяются в больших автоматах с электромагнитным расцепителем, где велики усилия М. Наиболее технологичным является тип а, ввиду того что у него легко точно обработать цилиндрическую поверхность касания запирающей детали, которая концентрична с осью вращения. Защелки с трением качения менее точны, чем с трением скольжения. Последние более подходят для тепловых расцепителей. Защелки с трением скольжения с успехом применяются для малых автоматов, где малы усилия.

Рис. 5-18. Защелки механизмов свободного расцепления автоматов.
Мертвые защелки с трением качения наиболее просты в сборке и менее всего подвержены производственным отклонениям. У ломающихся рычагов надо при сборке регулировать величину перехода за мертвое положение. Наиболее чувствительны к производственным отклонениям защелки с трением скольжения. Они всегда требуют подгонки поверхности при сборке. Поэтому эти поверхности нельзя сделать настолько твердыми, чтобы практически ликвидировать их износ.
Для надежности желательно, чтобы защелки расцеплялись под действием ударяющей по ним детали, а не под действием статически приложенной силы. Для уменьшения влияния на защелку удара от включения
электромагнитного привода надо, чтобы их движения были во взаимно перпендикулярных плоскостях.
В обычных конструкциях универсальных автоматов не достигается быстродействия, достаточного для токо- ограничения, так как большое время уходит на расцепление механизма и движение общей для всех полюсов контактной системы. В одной из новых конструкций [JT. 4-12 и 4-13] трехполюсных автоматов фирмы Делль на номинальные токи 500—2 000 а и напряжение 500 в (рис. 5-19), рассчитанных на включение тока 260 кА (амплитуда) и отключение тока 100 кА (действующее значение симметричной составляющей), быстродействие достигнуто благодаря тому, что контакты при токах более 40/и (при номинальном токе /и=500 а) отбрасываются электродинамическими силами. Как бы ни был ток близок к 40 /и, дуга существует не менее 2,5 мсек.
Pиc. 5-19. Полюс токоограничивающего автомата фирмы Делль высокой разрывной способности.
1 и 2 — якорь и сердечник сверхбыстродействующего расцепителя; 3 — защелка; 4 — рычаг защелки; 5 — контактодержатель подвижного контакта; 6 — возвратная пружина контактодержателя.
При меньших временах отброса образуются только жидкие мостики и контакты не свариваются. 1,5 мсек уходит на рост тока до 40 кА. За 4 мсек быстродействующий расцепитель, имеющий ток уставки 7 кА и действующий непосредственно без промежуточных звеньев только на данный полюс, расцепит контактную систему этого полюса, вследствие чего контактодержатель успеет отойти настолько, что контакты после отброса не смогут больше сомкнуться. Пополюсное расцепление уменьшает инерционные усилия. Расцепление одного полюса вызовет в дальнейшем расцепление остальных полюсов, которые, приходя в отключенное положение, автоматически взводятся и при включении движутся вместе, как в обычных автоматах. При максимально допустимом токе короткого замыкания контура 100 кА ток ограничивается до 35 — 44% своего максимального значения (в зависимости от величины постоянной составляющей). Невозможность создать селективное отключение с нижестоящими автоматами является весьма существенным недостатком этой конструкции.